
Esta página fornece uma visão geral de como implementar um driver de API de redes neurais (NNAPI). Para mais detalhes, consulte a documentação encontrada nos arquivos de definição HAL em hardware/interfaces/neuralnetworks . Uma implementação de driver de exemplo está em frameworks/ml/nn/driver/sample .
Para obter mais informações sobre a API de redes neurais, consulte API de redes neurais .
Redes Neurais HAL
O HAL de redes neurais (NN) define uma abstração dos vários dispositivos , como unidades de processamento gráfico (GPUs) e processadores de sinais digitais (DSPs), que estão em um produto (por exemplo, um telefone ou tablet). Os drivers para esses dispositivos devem estar em conformidade com o NN HAL. A interface é especificada nos arquivos de definição HAL em hardware/interfaces/neuralnetworks .
O fluxo geral da interface entre o framework e um driver é representado na figura 1.
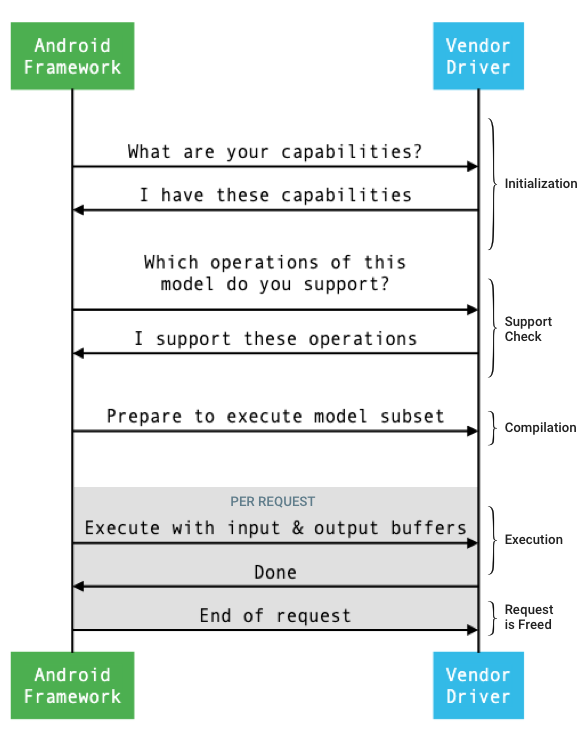
Figura 1. Fluxo de Redes Neurais
Inicialização
Na inicialização, a estrutura consulta o driver por seus recursos usando IDevice::getCapabilities_1_3 . A estrutura @1.3::Capabilities inclui todos os tipos de dados e representa o desempenho não relaxado usando um vetor.
Para determinar como alocar computações para os dispositivos disponíveis, a estrutura usa os recursos para entender com que rapidez e eficiência de energia cada driver pode executar uma execução. Para fornecer essas informações, o driver deve fornecer números de desempenho padronizados com base na execução de cargas de trabalho de referência.
Para determinar os valores que o driver retorna em resposta a IDevice::getCapabilities_1_3 , use o aplicativo de referência NNAPI para medir o desempenho dos tipos de dados correspondentes. Os modelos MobileNet v1 e v2, asr_float e tts_float são recomendados para medir o desempenho para valores de ponto flutuante de 32 bits e os modelos quantizados MobileNet v1 e v2 são recomendados para valores quantizados de 8 bits. Para obter mais informações, consulte Android Machine Learning Test Suite .
No Android 9 e versões anteriores, a estrutura Capabilities inclui informações de desempenho do driver apenas para ponto flutuante e tensores quantizados e não inclui tipos de dados escalares.
Como parte do processo de inicialização, a estrutura pode consultar mais informações, usando IDevice::getType , IDevice::getVersionString , IDevice:getSupportedExtensions e IDevice::getNumberOfCacheFilesNeeded .
Entre as reinicializações do produto, a estrutura espera que todas as consultas descritas nesta seção sempre reportem os mesmos valores para um determinado driver. Caso contrário, um aplicativo que usa esse driver pode apresentar desempenho reduzido ou comportamento incorreto.
Compilação
A estrutura determina quais dispositivos usar quando recebe uma solicitação de um aplicativo. No Android 10, os aplicativos podem descobrir e especificar os dispositivos escolhidos pela estrutura. Para obter mais informações, consulte Descoberta e atribuição de dispositivos .
No momento da compilação do modelo, a estrutura envia o modelo para cada driver candidato chamando IDevice::getSupportedOperations_1_3 . Cada driver retorna um array de booleanos indicando quais operações do modelo são suportadas. Um driver pode determinar que não pode suportar uma determinada operação por vários motivos. Por exemplo:
- O driver não suporta o tipo de dados.
- O driver suporta apenas operações com parâmetros de entrada específicos. Por exemplo, um driver pode suportar operações de convolução 3x3 e 5x5, mas não 7x7.
- O driver tem restrições de memória que o impedem de lidar com grandes gráficos ou entradas.
Durante a compilação, a entrada, a saída e os operandos internos do modelo, conforme descrito em OperandLifeTime , podem ter dimensões ou classificação desconhecidas. Para obter mais informações, consulte Forma de saída .
A estrutura instrui cada driver selecionado a se preparar para executar um subconjunto do modelo chamando IDevice::prepareModel_1_3 . Cada driver então compila seu subconjunto. Por exemplo, um driver pode gerar código ou criar uma cópia reordenada dos pesos. Como pode haver um tempo significativo entre a compilação do modelo e a execução das solicitações, recursos como grandes blocos de memória do dispositivo não devem ser atribuídos durante a compilação.
Em caso de sucesso, o driver retorna um identificador @1.3::IPreparedModel . Se o driver retornar um código de falha ao preparar seu subconjunto do modelo, a estrutura executará todo o modelo na CPU.
Para reduzir o tempo usado para compilação quando um aplicativo é iniciado, um driver pode armazenar em cache os artefatos de compilação. Para obter mais informações, consulte Cache de compilação .
Execução
Quando um aplicativo solicita que a estrutura execute uma solicitação, a estrutura chama o IPreparedModel::executeSynchronously_1_3 HAL por padrão para executar uma execução síncrona em um modelo preparado. Uma solicitação também pode ser executada de forma assíncrona usando o método execute_1_3 , o método executeFenced (consulte Execução limitada) ou executada usando uma execução intermitente .
As chamadas de execução síncrona melhoram o desempenho e reduzem a sobrecarga de encadeamento em comparação com as chamadas assíncronas porque o controle é retornado ao processo do aplicativo somente após a conclusão da execução. Isso significa que o driver não precisa de um mecanismo separado para notificar o processo do aplicativo de que uma execução foi concluída.
Com o método assíncrono execute_1_3 , o controle retorna ao processo do aplicativo após o início da execução, e o driver deve notificar o framework quando a execução for concluída, usando o @1.3::IExecutionCallback .
O parâmetro Request passado para o método execute lista os operandos de entrada e saída usados para a execução. A memória que armazena os dados do operando deve usar a ordem principal da linha com a primeira dimensão iterando a mais lenta e sem preenchimento no final de nenhuma linha. Para obter mais informações sobre os tipos de operandos, consulte Operandos .
Para drivers NN HAL 1.2 ou superior, quando uma solicitação é concluída, o status do erro, o formato de saída e as informações de tempo são retornados à estrutura. Durante a execução, a saída ou os operandos internos do modelo podem ter uma ou mais dimensões desconhecidas ou classificação desconhecida. Quando pelo menos um operando de saída possui uma dimensão ou classificação desconhecida, o driver deve retornar informações de saída dimensionadas dinamicamente.
Para motoristas com NN HAL 1.1 ou inferior, apenas o status de erro é retornado quando uma solicitação é concluída. As dimensões dos operandos de entrada e saída devem ser totalmente especificadas para que a execução seja concluída com sucesso. Os operandos internos podem ter uma ou mais dimensões desconhecidas, mas devem ter classificação especificada.
Para solicitações de usuários que abrangem vários drivers, a estrutura é responsável por reservar memória intermediária e sequenciar as chamadas para cada driver.
Várias solicitações podem ser iniciadas em paralelo no mesmo @1.3::IPreparedModel . O driver pode executar solicitações em paralelo ou serializar as execuções.
A estrutura pode pedir a um motorista para manter mais de um modelo preparado. Por exemplo, prepare o modelo m1 , prepare m2 , execute a solicitação r1 em m1 , execute r2 em m2 , execute r3 em m1 , execute r4 em m2 , libere (descrito em Limpeza ) m1 e libere m2 .
Para evitar uma primeira execução lenta que pode resultar em uma experiência de usuário insatisfatória (por exemplo, uma interrupção do primeiro quadro), o driver deve executar a maioria das inicializações na fase de compilação. A inicialização na primeira execução deve ser limitada a ações que afetam negativamente a integridade do sistema quando executadas antecipadamente, como reservar grandes buffers temporários ou aumentar a taxa de clock de um dispositivo. Drivers que podem preparar apenas um número limitado de modelos simultâneos podem ter que fazer sua inicialização na primeira execução.
No Android 10 ou superior, nos casos em que várias execuções com o mesmo modelo preparado são executadas em rápida sucessão, o cliente pode optar por usar um objeto de rajada de execução para se comunicar entre o aplicativo e os processos do driver. Para obter mais informações, consulte Burst Executions e Fast Message Queues .
Para melhorar o desempenho de várias execuções em rápida sucessão, o driver pode manter buffers temporários ou aumentar as taxas de clock. A criação de um encadeamento watchdog é recomendada para liberar recursos se nenhuma nova solicitação for criada após um período fixo de tempo.
Forma de saída
Para solicitações em que um ou mais operandos de saída não possuem todas as dimensões especificadas, o driver deve fornecer uma lista de formas de saída contendo as informações de dimensão para cada operando de saída após a execução. Para obter mais informações sobre dimensões, consulte OutputShape .
Se uma execução falhar devido a um buffer de saída subdimensionado, o driver deve indicar quais operandos de saída têm tamanho de buffer insuficiente na lista de formas de saída e deve relatar o máximo possível de informações dimensionais, usando zero para dimensões desconhecidas.
Cronometragem
No Android 10, um aplicativo pode solicitar o tempo de execução se o aplicativo tiver especificado um único dispositivo para usar durante o processo de compilação. Para obter detalhes, consulte MeasureTiming e Device Discovery and Assignment . Nesse caso, um driver NN HAL 1.2 deve medir a duração da execução ou relatar UINT64_MAX (para indicar que a duração está indisponível) ao executar uma solicitação. O driver deve minimizar qualquer penalidade de desempenho resultante da medição da duração da execução.
O driver relata as seguintes durações em microssegundos na estrutura Timing :
- Tempo de execução no dispositivo: Não inclui o tempo de execução no driver, que é executado no processador host.
- Tempo de execução no driver: Inclui o tempo de execução no dispositivo.
Essas durações devem incluir o tempo em que a execução é suspensa, por exemplo, quando a execução foi interrompida por outras tarefas ou quando está aguardando a disponibilização de um recurso.
Quando o driver não foi solicitado a medir a duração da execução ou quando há um erro de execução, o driver deve relatar as durações como UINT64_MAX . Mesmo quando o driver foi solicitado a medir a duração da execução, ele pode relatar UINT64_MAX para o tempo no dispositivo, tempo no driver ou ambos. Quando o driver relata ambas as durações como um valor diferente de UINT64_MAX , o tempo de execução no driver deve ser igual ou superior ao tempo no dispositivo.
Execução cercada
No Android 11, a NNAPI permite que as execuções aguardem uma lista de identificadores sync_fence e, opcionalmente, retornem um objeto sync_fence , que é sinalizado quando a execução é concluída. Isso reduz a sobrecarga para modelos de sequência pequena e casos de uso de streaming. A execução limitada também permite uma interoperabilidade mais eficiente com outros componentes que podem sinalizar ou esperar pelo sync_fence . Para obter mais informações sobre sync_fence , consulte Estrutura de sincronização .
Em uma execução limitada, a estrutura chama o método IPreparedModel::executeFenced para iniciar uma execução assíncrona limitada em um modelo preparado com um vetor de cercas de sincronização para aguardar. Se a tarefa assíncrona for concluída antes do retorno da chamada, um identificador vazio poderá ser retornado para sync_fence . Um objeto IFencedExecutionCallback também deve ser retornado para permitir que a estrutura consulte o status do erro e as informações de duração.
Após a conclusão de uma execução, os dois valores de tempo a seguir, que medem a duração da execução, podem ser consultados por meio IFencedExecutionCallback::getExecutionInfo .
-
timingLaunched: Duração desde quandoexecuteFencedé chamado até quandoexecuteFencedsinaliza osyncFenceretornado . -
timingFenced: Duração de quando todos os limites de sincronização que a execução espera são sinalizados até quandoexecuteFencedsinaliza osyncFenceretornado .
Controle de fluxo
Para dispositivos com Android 11 ou superior, a NNAPI inclui duas operações de fluxo de controle, IF e WHILE , que usam outros modelos como argumentos e os executam condicionalmente ( IF ) ou repetidamente ( WHILE ). Para obter mais informações sobre como implementar isso, consulte Fluxo de controle .
Qualidade de serviço
No Android 11, a NNAPI inclui qualidade de serviço (QoS) aprimorada, permitindo que um aplicativo indique as prioridades relativas de seus modelos, o tempo máximo esperado para a preparação de um modelo e o tempo máximo esperado para uma execução para ser concluído. Para obter mais informações, consulte Qualidade de serviço .
Limpar
Quando um aplicativo termina de usar um modelo preparado, a estrutura libera sua referência para o objeto @1.3::IPreparedModel . Quando o objeto IPreparedModel não é mais referenciado, ele é destruído automaticamente no serviço de driver que o criou. Os recursos específicos do modelo podem ser recuperados neste momento na implementação do driver do destruidor. Se o serviço de driver desejar que o objeto IPreparedModel seja destruído automaticamente quando não for mais necessário para o cliente, ele não deverá conter nenhuma referência ao objeto IPreparedModel depois que o objeto IPreparedeModel for retornado por meio IPreparedModelCallback::notify_1_3 .
utilização do CPU
Espera-se que os drivers usem a CPU para configurar cálculos. Os drivers não devem usar a CPU para executar cálculos de gráfico porque isso interfere na capacidade da estrutura de alocar o trabalho corretamente. O driver deve relatar as partes que não pode manipular para o framework e deixar que o framework cuide do resto.
A estrutura fornece uma implementação de CPU para todas as operações NNAPI, exceto para operações definidas pelo fornecedor. Para obter mais informações, consulte Extensões do fornecedor .
As operações introduzidas no Android 10 (API de nível 29) possuem apenas uma implementação de CPU de referência para verificar se os testes CTS e VTS estão corretos. As implementações otimizadas incluídas nas estruturas de aprendizado de máquina móvel são preferidas à implementação da CPU NNAPI.
funções utilitárias
A base de código NNAPI inclui funções utilitárias que podem ser usadas por serviços de driver.
O arquivo frameworks/ml/nn/common/include/Utils.h contém diversas funções utilitárias, como aquelas usadas para registro e para conversão entre diferentes versões de NN HAL.
VLogging:
VLOGé uma macro wrapper em torno doLOGdo Android que apenas registra a mensagem se a tag apropriada estiver definida na propriedadedebug.nn.vlog.initVLogMask()deve ser chamado antes de qualquer chamada paraVLOG. A macroVLOG_IS_ONpode ser usada para verificar se oVLOGestá ativado no momento, permitindo que o código de registro complicado seja ignorado se não for necessário. O valor do imóvel deve ser um dos seguintes:- Uma string vazia, indicando que nenhum registro deve ser feito.
- O token
1ouall, indicando que todo registro deve ser feito. - Uma lista de tags, delimitadas por espaços, vírgulas ou dois pontos, indicando qual registro deve ser feito. As tags são
compilation,cpuexe,driver,execution,manageremodel.
compliantWithV1_*: Retornatruese um objeto NN HAL puder ser convertido para o mesmo tipo de uma versão HAL diferente sem perder informações. Por exemplo, chamar EmployeeWithV1_0 em umcompliantWithV1_0V1_2::Modelretornafalsese o modelo incluir tipos de operação introduzidos em NN HAL 1.1 ou NN HAL 1.2.convertToV1_*: Converte um objeto NN HAL de uma versão para outra. Um aviso será registrado se a conversão resultar em perda de informações (ou seja, se a nova versão do tipo não puder representar totalmente o valor).Capabilities: As funções
nonExtensionOperandPerformanceeupdatepodem ser usadas para ajudar a criar o campoCapabilities::operandPerformance.Consultando propriedades de tipos:
isExtensionOperandType,isExtensionOperationType,nonExtensionSizeOfData,nonExtensionOperandSizeOfData,nonExtensionOperandTypeIsScalar,tensorHasUnspecifiedDimensions.
O arquivo frameworks/ml/nn/common/include/ValidateHal.h contém funções utilitárias para validar se um objeto NN HAL é válido de acordo com a especificação de sua versão HAL.
-
validate*: Retornatruese o objeto NN HAL for válido de acordo com a especificação de sua versão HAL. Tipos OEM e tipos de extensão não são validados. Por exemplo,validateModelretornaráfalsese o modelo contiver uma operação que faça referência a um índice de operando que não existe ou uma operação que não tenha suporte nessa versão HAL.
O arquivo frameworks/ml/nn/common/include/Tracing.h contém macros para simplificar a adição de informações de systracing ao código de redes neurais. Para obter um exemplo, consulte as chamadas de macro NNTRACE_* no driver de amostra .
O arquivo frameworks/ml/nn/common/include/GraphDump.h contém uma função utilitária para despejar o conteúdo de um Model em forma gráfica para propósitos de depuração.
-
graphDump: Grava uma representação do modelo no formato Graphviz (.dot) no fluxo especificado (se fornecido) ou no logcat (se nenhum fluxo for fornecido).
Validação
Para testar sua implementação da NNAPI, use os testes VTS e CTS incluídos na estrutura do Android. O VTS exercita seus drivers diretamente (sem usar a estrutura), enquanto o CTS os exercita indiretamente por meio da estrutura. Eles testam cada método de API e verificam se todas as operações suportadas pelos drivers funcionam corretamente e fornecem resultados que atendem aos requisitos de precisão.
Os requisitos de precisão em CTS e VTS para a NNAPI são os seguintes:
Ponto flutuante: abs(esperado - real) <= atol + rtol * abs(esperado); Onde:
- Para fp32, atol = 1e-5f, rtol = 5,0f * 1,1920928955078125e-7
- Para fp16, atol = rtol = 5,0f * 0,0009765625f
Quantized: off-by-one (exceto para
mobilenet_quantized, que é off-by-three)Booleano: correspondência exata
Uma maneira de o CTS testar a NNAPI é gerando gráficos pseudo-aleatórios fixos usados para testar e comparar os resultados da execução de cada driver com a implementação de referência da NNAPI. Para drivers com NN HAL 1.2 ou superior, se os resultados não atenderem aos critérios de precisão, o CTS relata um erro e despeja um arquivo de especificação para o modelo com falha em /data/local/tmp para depuração. Para obter mais detalhes sobre os critérios de precisão, consulte TestRandomGraph.cpp e TestHarness.h .
teste fuzz
O objetivo do teste fuzz é encontrar travamentos, asserções, violações de memória ou comportamento geral indefinido no código em teste devido a fatores como entradas inesperadas. Para testes fuzz NNAPI, o Android usa testes baseados em libFuzzer , que são eficientes em fuzzing porque usam cobertura de linha de casos de teste anteriores para gerar novas entradas aleatórias. Por exemplo, libFuzzer favorece casos de teste executados em novas linhas de código. Isso reduz muito o tempo que os testes levam para encontrar códigos problemáticos.
Para executar o teste fuzz para validar a implementação do driver, modifique frameworks/ml/nn/runtime/test/android_fuzzing/DriverFuzzTest.cpp no utilitário de teste libneuralnetworks_driver_fuzzer encontrado no AOSP para incluir o código do driver. Para obter mais informações sobre o teste fuzz NNAPI, consulte frameworks/ml/nn/runtime/test/android_fuzzing/README.md .
Segurança
Como os processos do aplicativo se comunicam diretamente com o processo do motorista, os motoristas devem validar os argumentos das chamadas que recebem. Esta validação é verificada pelo VTS. O código de validação está em frameworks/ml/nn/common/include/ValidateHal.h .
Os motoristas também devem garantir que os aplicativos não interfiram em outros aplicativos ao usar o mesmo dispositivo.
Conjunto de teste de aprendizado de máquina Android
O Android Machine Learning Test Suite (MLTS) é um benchmark NNAPI incluído no CTS e VTS para validar a precisão de modelos reais em dispositivos de fornecedores. O benchmark avalia a latência e a precisão e compara os resultados dos drivers com os resultados usando o TF Lite rodando na CPU, para o mesmo modelo e conjuntos de dados. Isso garante que a precisão de um driver não seja pior do que a implementação de referência da CPU.
Os desenvolvedores da plataforma Android também usam o MLTS para avaliar a latência e a precisão dos drivers.
O benchmark NNAPI pode ser encontrado em dois projetos no AOSP:
-
platform/test/mlts/benchmark(aplicativo de benchmark) -
platform/test/mlts/models(modelos e conjuntos de dados)
Modelos e conjuntos de dados
O benchmark NNAPI usa os seguintes modelos e conjuntos de dados.
- MobileNetV1 float e u8 quantizados em tamanhos diferentes, executados em um pequeno subconjunto (1500 imagens) do Open Images Dataset v4.
- MobileNetV2 float e u8 quantizados em tamanhos diferentes, executados em um pequeno subconjunto (1500 imagens) do Open Images Dataset v4.
- Modelo acústico baseado em memória de curto prazo (LSTM) para conversão de texto em fala, executado em um pequeno subconjunto do conjunto CMU Arctic.
- Modelo acústico baseado em LSTM para reconhecimento automático de fala, executado em um pequeno subconjunto do conjunto de dados LibriSpeech.
Para obter mais informações, consulte platform/test/mlts/models .
Teste de estresse
O Android Machine Learning Test Suite inclui uma série de testes de colisão para validar a resiliência dos drivers em condições de uso intenso ou em casos extremos de comportamento dos clientes.
Todos os testes de colisão fornecem os seguintes recursos:
- Detecção de travamento: se o cliente NNAPI travar durante um teste, o teste falhará com o motivo da falha
HANGe o conjunto de testes passará para o próximo teste. - Detecção de travamento do cliente NNAPI: os testes sobrevivem a travamentos do cliente e os testes falham com o motivo da falha
CRASH. - Detecção de falha de driver: os testes podem detectar uma falha de driver que causa uma falha em uma chamada NNAPI. Observe que pode haver travamentos em processos de driver que não causam uma falha de NNAPI e não causam falha no teste. Para cobrir esse tipo de falha, é recomendável executar o comando
tailno log do sistema para erros ou travamentos relacionados ao driver. - Segmentação de todos os aceleradores disponíveis: os testes são executados em todos os drivers disponíveis.
Todos os testes de colisão têm os seguintes quatro resultados possíveis:
-
SUCCESS: Execução concluída sem erro. -
FAILURE: Falha na execução. Normalmente causado por uma falha ao testar um modelo, indicando que o driver falhou ao compilar ou executar o modelo. -
HANG: O processo de teste deixou de responder. -
CRASH: O processo de teste travou.
Para obter mais informações sobre testes de estresse e uma lista completa de testes de colisão, consulte platform/test/mlts/benchmark/README.txt .
Usando MLTS
Para usar o MLTS:
- Conecte um dispositivo de destino à sua estação de trabalho e verifique se ele pode ser acessado por adb . Exporte a variável de ambiente
ANDROID_SERIALdo dispositivo de destino se mais de um dispositivo estiver conectado. cdno diretório de origem de nível superior do Android.source build/envsetup.sh lunch aosp_arm-userdebug # Or aosp_arm64-userdebug if available. ./test/mlts/benchmark/build_and_run_benchmark.shNo final de uma execução de benchmark, os resultados são apresentados como uma página HTML e passados para
xdg-open.
Para obter mais informações, consulte platform/test/mlts/benchmark/README.txt .
Versões HAL de redes neurais
Esta seção descreve as alterações introduzidas nas versões Android e Redes Neurais HAL.
Android 11
O Android 11 apresenta o NN HAL 1.3, que inclui as seguintes alterações notáveis.
- Suporte para quantização de 8 bits com sinal em NNAPI. Adiciona o tipo de operando
TENSOR_QUANT8_ASYMM_SIGNED. Drivers com NN HAL 1.3 que oferecem suporte a operações com quantização sem sinal também devem oferecer suporte às variantes com sinal dessas operações. Ao executar versões assinadas e não assinadas da maioria das operações quantizadas, os drivers devem produzir os mesmos resultados até um deslocamento de 128. Há cinco exceções a esse requisito:CAST,HASHTABLE_LOOKUP,LSH_PROJECTION,PAD_V2eQUANTIZED_16BIT_LSTM. A operaçãoQUANTIZED_16BIT_LSTMnão suporta operandos com sinal e as outras quatro operações suportam quantização com sinal, mas não exigem que os resultados sejam iguais. - Suporte para execuções limitadas em que a estrutura chama o método
IPreparedModel::executeFencedpara iniciar uma execução assíncrona limitada em um modelo preparado com um vetor de cercas de sincronização para aguardar. Para obter mais informações, consulte Execução limitada . - Suporte para fluxo de controle. Adiciona as operações
IFeWHILE, que tomam outros modelos como argumentos e os executam condicionalmente (IF) ou repetidamente (WHILE). Para obter mais informações, consulte Fluxo de controle . - Melhor qualidade de serviço (QoS) como aplicativos podem indicar as prioridades relativas de seus modelos, a quantidade máxima de tempo esperada para um modelo ser preparado e a quantidade máxima de tempo esperada para uma execução ser concluída. Para obter mais informações, consulte Qualidade de serviço .
- Suporte para domínios de memória que fornecem interfaces de alocador para buffers gerenciados por driver. Isso permite a passagem de memórias nativas do dispositivo entre execuções, suprimindo a cópia desnecessária de dados e a transformação entre execuções consecutivas no mesmo driver. Para obter mais informações, consulte Domínios de memória .
Android 10
O Android 10 apresenta o NN HAL 1.2, que inclui as seguintes alterações notáveis.
- A estrutura
Capabilitiesinclui todos os tipos de dados, incluindo tipos de dados escalares, e representa o desempenho não relaxado usando um vetor em vez de campos nomeados. - Os métodos
getVersionStringegetTypepermitem que a estrutura recupere o tipo de dispositivo (DeviceType) e as informações de versão. Consulte Descoberta e atribuição de dispositivos . - O método
executeSynchronouslyé chamado por padrão para executar uma execução de forma síncrona. O métodoexecute_1_2diz ao framework para executar uma execução de forma assíncrona. Veja Execução . - O parâmetro
executeSynchronouslyMeasureTimingexecute_1_2e execução intermitente especifica se o driver deve medir a duração da execução. Os resultados são relatados na estruturaTiming. Consulte Cronometragem . - Suporte para execuções em que um ou mais operandos de saída possuem uma dimensão ou classificação desconhecida. Consulte Forma de saída .
- Suporte para extensões de fornecedor, que são coleções de operações e tipos de dados definidos pelo fornecedor. O driver relata as extensões com suporte por meio do método
IDevice::getSupportedExtensions. Consulte Extensões do fornecedor . - Capacidade de um objeto de intermitência controlar um conjunto de execuções de intermitência usando filas de mensagens rápidas (FMQs) para se comunicar entre o aplicativo e os processos do driver, reduzindo a latência. Consulte Execuções intermitentes e Filas de mensagens rápidas .
- Suporte para AHardwareBuffer para permitir que o driver execute execuções sem copiar dados. Veja AHardwareBuffer .
- Suporte aprimorado para armazenamento em cache de artefatos de compilação para reduzir o tempo usado para compilação quando um aplicativo é iniciado. Consulte Cache de compilação .
O Android 10 apresenta os seguintes tipos de operando e operações.
-
ANEURALNETWORKS_BOOL -
ANEURALNETWORKS_FLOAT16 -
ANEURALNETWORKS_TENSOR_BOOL8 -
ANEURALNETWORKS_TENSOR_FLOAT16 -
ANEURALNETWORKS_TENSOR_QUANT16_ASYMM -
ANEURALNETWORKS_TENSOR_QUANT16_SYMM -
ANEURALNETWORKS_TENSOR_QUANT8_SYMM -
ANEURALNETWORKS_TENSOR_QUANT8_SYMM_PER_CHANNEL
-
-
ANEURALNETWORKS_ABS -
ANEURALNETWORKS_ARGMAX -
ANEURALNETWORKS_ARGMIN -
ANEURALNETWORKS_AXIS_ALIGNED_BBOX_TRANSFORM -
ANEURALNETWORKS_BIDIRECTIONAL_SEQUENCE_LSTM -
ANEURALNETWORKS_BIDIRECTIONAL_SEQUENCE_RNN -
ANEURALNETWORKS_BOX_WITH_NMS_LIMIT -
ANEURALNETWORKS_CAST -
ANEURALNETWORKS_CHANNEL_SHUFFLE -
ANEURALNETWORKS_DETECTION_POSTPROCESSING -
ANEURALNETWORKS_EQUAL -
ANEURALNETWORKS_EXP -
ANEURALNETWORKS_EXPAND_DIMS -
ANEURALNETWORKS_GATHER -
ANEURALNETWORKS_GENERATE_PROPOSALS -
ANEURALNETWORKS_GREATER -
ANEURALNETWORKS_GREATER_EQUAL -
ANEURALNETWORKS_GROUPED_CONV_2D -
ANEURALNETWORKS_HEATMAP_MAX_KEYPOINT -
ANEURALNETWORKS_INSTANCE_NORMALIZATION -
ANEURALNETWORKS_LESS -
ANEURALNETWORKS_LESS_EQUAL -
ANEURALNETWORKS_LOG -
ANEURALNETWORKS_LOGICAL_AND -
ANEURALNETWORKS_LOGICAL_NOT -
ANEURALNETWORKS_LOGICAL_OR -
ANEURALNETWORKS_LOG_SOFTMAX -
ANEURALNETWORKS_MAXIMUM -
ANEURALNETWORKS_MINIMUM -
ANEURALNETWORKS_NEG -
ANEURALNETWORKS_NOT_EQUAL -
ANEURALNETWORKS_PAD_V2 -
ANEURALNETWORKS_POW -
ANEURALNETWORKS_PRELU -
ANEURALNETWORKS_QUANTIZE -
ANEURALNETWORKS_QUANTIZED_16BIT_LSTM -
ANEURALNETWORKS_RANDOM_MULTINOMIAL -
ANEURALNETWORKS_REDUCE_ALL -
ANEURALNETWORKS_REDUCE_ANY -
ANEURALNETWORKS_REDUCE_MAX -
ANEURALNETWORKS_REDUCE_MIN -
ANEURALNETWORKS_REDUCE_PROD -
ANEURALNETWORKS_REDUCE_SUM -
ANEURALNETWORKS_RESIZE_NEAREST_NEIGHBOR -
ANEURALNETWORKS_ROI_ALIGN -
ANEURALNETWORKS_ROI_POOLING -
ANEURALNETWORKS_RSQRT -
ANEURALNETWORKS_SELECT -
ANEURALNETWORKS_SIN -
ANEURALNETWORKS_SLICE -
ANEURALNETWORKS_SPLIT -
ANEURALNETWORKS_SQRT -
ANEURALNETWORKS_TILE -
ANEURALNETWORKS_TOPK_V2 -
ANEURALNETWORKS_TRANSPOSE_CONV_2D -
ANEURALNETWORKS_UNIDIRECTIONAL_SEQUENCE_LSTM -
ANEURALNETWORKS_UNIDIRECTIONAL_SEQUENCE_RNN
-
O Android 10 apresenta atualizações para muitas das operações existentes. As atualizações estão relacionadas principalmente com o seguinte:
- Suporte para o layout de memória NCHW
- Suporte para tensores com rank diferente de 4 em softmax e operações de normalização
- Suporte para circunvoluções dilatadas
- Suporte para entradas com quantização mista em
ANEURALNETWORKS_CONCATENATION
A lista abaixo mostra as operações modificadas no Android 10. Para obter detalhes completos sobre as alterações, consulte OperationCode na documentação de referência da NNAPI.
-
ANEURALNETWORKS_ADD -
ANEURALNETWORKS_AVERAGE_POOL_2D -
ANEURALNETWORKS_BATCH_TO_SPACE_ND -
ANEURALNETWORKS_CONCATENATION -
ANEURALNETWORKS_CONV_2D -
ANEURALNETWORKS_DEPTHWISE_CONV_2D -
ANEURALNETWORKS_DEPTH_TO_SPACE -
ANEURALNETWORKS_DEQUANTIZE -
ANEURALNETWORKS_DIV -
ANEURALNETWORKS_FLOOR -
ANEURALNETWORKS_FULLY_CONNECTED -
ANEURALNETWORKS_L2_NORMALIZATION -
ANEURALNETWORKS_L2_POOL_2D -
ANEURALNETWORKS_LOCAL_RESPONSE_NORMALIZATION -
ANEURALNETWORKS_LOGISTIC -
ANEURALNETWORKS_LSH_PROJECTION -
ANEURALNETWORKS_LSTM -
ANEURALNETWORKS_MAX_POOL_2D -
ANEURALNETWORKS_MEAN -
ANEURALNETWORKS_MUL -
ANEURALNETWORKS_PAD -
ANEURALNETWORKS_RELU -
ANEURALNETWORKS_RELU1 -
ANEURALNETWORKS_RELU6 -
ANEURALNETWORKS_RESHAPE -
ANEURALNETWORKS_RESIZE_BILINEAR -
ANEURALNETWORKS_RNN -
ANEURALNETWORKS_ROI_ALIGN -
ANEURALNETWORKS_SOFTMAX -
ANEURALNETWORKS_SPACE_TO_BATCH_ND -
ANEURALNETWORKS_SPACE_TO_DEPTH -
ANEURALNETWORKS_SQUEEZE -
ANEURALNETWORKS_STRIDED_SLICE -
ANEURALNETWORKS_SUB -
ANEURALNETWORKS_SVDF -
ANEURALNETWORKS_TANH -
ANEURALNETWORKS_TRANSPOSE
Android 9
NN HAL 1.1 é introduzido no Android 9 e inclui as seguintes alterações notáveis.
-
IDevice::prepareModel_1_1inclui um parâmetroExecutionPreference. Um motorista pode usar isso para ajustar sua preparação, sabendo que o aplicativo prefere economizar bateria ou executar o modelo em chamadas rápidas e sucessivas. - Nove novas operações foram adicionadas:
BATCH_TO_SPACE_ND,DIV,MEAN,PAD,SPACE_TO_BATCH_ND,SQUEEZE,STRIDED_SLICE,SUB,TRANSPOSE. - Um aplicativo pode especificar que cálculos flutuantes de 32 bits podem ser executados usando precisão e/ou faixa flutuante de 16 bits definindo
Model.relaxComputationFloat32toFloat16comotrue. A estruturaCapabilitiestem o campo adicionalrelaxedFloat32toFloat16Performancepara que o driver possa relatar seu desempenho relaxado para a estrutura.
Android 8.1
O HAL inicial de redes neurais (1.0) foi lançado no Android 8.1. Para obter mais informações, consulte /neuralnetworks/1.0/ .