
本页介绍了如何组装 Android 13 控制器,该控制器用于控制传感器融合测试装置的移动以及盒装 ITS 的照明。传感器融合测试是兼容性测试套件 (CTS) 中的相机图像测试套件(相机 ITS)的一部分。Android 13 控制器通过控制装置的照明和伺服电机来实现自动化,以满足需要旋转和灯光控制的测试场景。
Android 13 控制器概览
盒装 ITS 提供了一致的测试环境,测试平板电脑和测试手机之间的距离是固定的;并且在没有外部光源的情况下,保持了一致的照明条件。Android 13 控制器可自动执行伺服控制和照明控制,让您无需为进行传感器融合场景测试而手动旋转 DUT,也无需为进行照明受控测试而手动开启和关闭灯。
测试装置中的伺服器和照明控制
传感器融合测试装置让手机在固定范围内移动,以进行可重现的测试。对着拍摄目标旋转手机,以便在不同位置拍摄图片。对于 test_sensor_fusion,伺服器在大约 2 秒内将手机绕着相机的轴心旋转 90 度然后再转回原位。对于 test_video_stabilization,伺服器将手机围绕相机的轴中心旋转 10 度,然后将手机转回原位,如此反复,从而模仿在步行拍视频时手机的移动情况。图 1 显示了在传感器融合测试装置中移动的两部手机。图 2 显示了在传感器融合测试装置中移动的一部手机。
图 1. test_sensor_fusion 测试装置中的手机移动

图 2. test_video_stabilization 测试装置中的手机移动
伺服电机控制
测试装置中的模拟伺服电机是采用脉冲宽度调制 (PWM) 控制的位置伺服器。图 3 显示了一个典型的位置控制示例。控制信号的周期为 20 毫秒。如果将脉冲宽度更改为最小宽度,电机会移动到空挡位置;如果将脉冲宽度更改为最大宽度,电机会顺时针旋转 180 度。
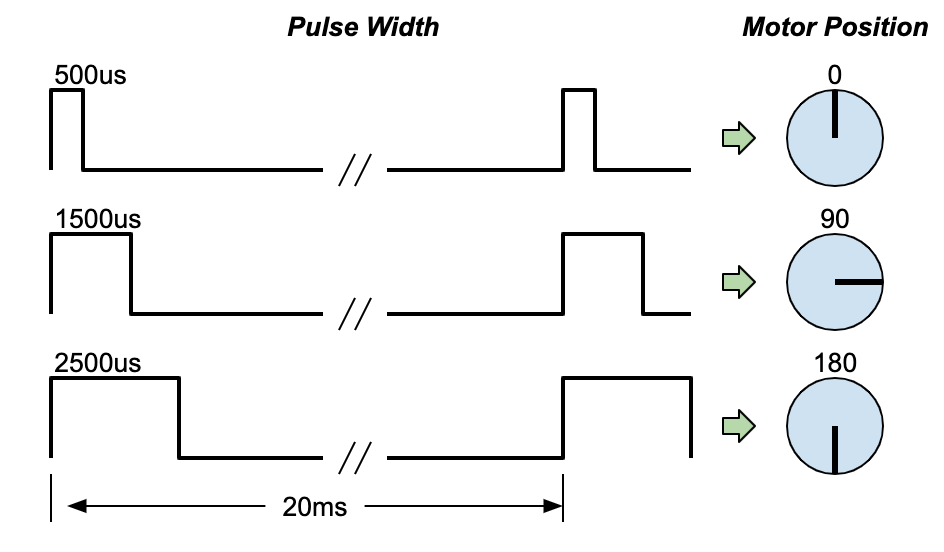
图 3. 典型的伺服控制说明
照明控制
为了利用主机控制伺服电机移动和照明,传感器融合测试装置需要 USB 连接。Android 13 控制器使用一个顶部安装了自定义布线板(或护罩)的 USB 连接的 Arduino UNO R3 板。Android 13 控制器可以通过单个主机控制最多三个传感器融合装置的旋转伺服器,以及最多三个盒装 ITS 照明系统,或者一个传感器融合装置。
修订版 3.0 Android 13 控制器让用户可在通过 USB 打开 Arduino 串行端口时停用自动重置功能。当控制器插入到另一部主机或用于其他测试用例时,自动重置功能会启用。用户可以使用控制器上的实体开关来启用或停用自动重置功能。
Android 13 控制器可以与任何相机盒装 ITS 配合使用。Android 13 控制器可以连接到任何相机盒装 ITS(RFoV、WFoV、模块化)或传感器融合盒,以进行照明受控测试。从 Android 15 开始,所有照明受控测试都包括在 scene_flash 中,并且可以使用传感器融合盒来运行;scene_low_light 除外,它需要平板电脑来显示图表,并且必须使用相机盒装 ITS 来运行。
对于 scene_flash 和 scene_low_light 中的测试,需要一个所有灯都已关闭的黑暗环境,才能在测试手机上触发自动闪光灯功能。图 4 显示了盒装 ITS 中的灯由 Android 13 控制器关闭和开启。
图 4. 为 test_auto_flash 关闭和开启灯
修订历史记录
下表说明了 Android 13 控制器的修订历史记录,并包含指向每一版生产文件的下载链接。
| 日期 | 修订版本 | 下载生产文件 | 更新日志 |
|---|---|---|---|
| 2024 年 8 月 | 3.0 |
|
|
| 2022 年 12 月 | 2.2 |
|
|
| 2022 年 3 月 | 1 |
|
Android 13 控制器设置
本部分介绍了如何设置 Android 13 控制器。
必需组件
您可以选择通过我们的某个合格供应商购买 Android 13 控制器,也可以自行构建控制器。生产文件包含 PCB Gerber 文件、PCB 物料清单 (BOM)、PCB 放置信息和外壳 STEP 文件。如需下载生产文件,请参阅修订历史记录中的表格。
如果您选择自行构建控制器,则需要准备一块 Arduino UNO R3 板。如果您通过合格供应商购买控制器,Arduino 板将包含在内。
Android 13 控制器外壳是一个可选但推荐的组件,可保护控制器并封闭未使用的 USB 端口,以防止出现设置错误。如需详细了解控制器的价格和选项,请与合格供应商联系。
设置过程
如需设置 Android 13 控制器,请按以下步骤操作:
将 12V(用于照明)和 5V(用于伺服器)适配器连接到相应的电源插孔(图 5)。
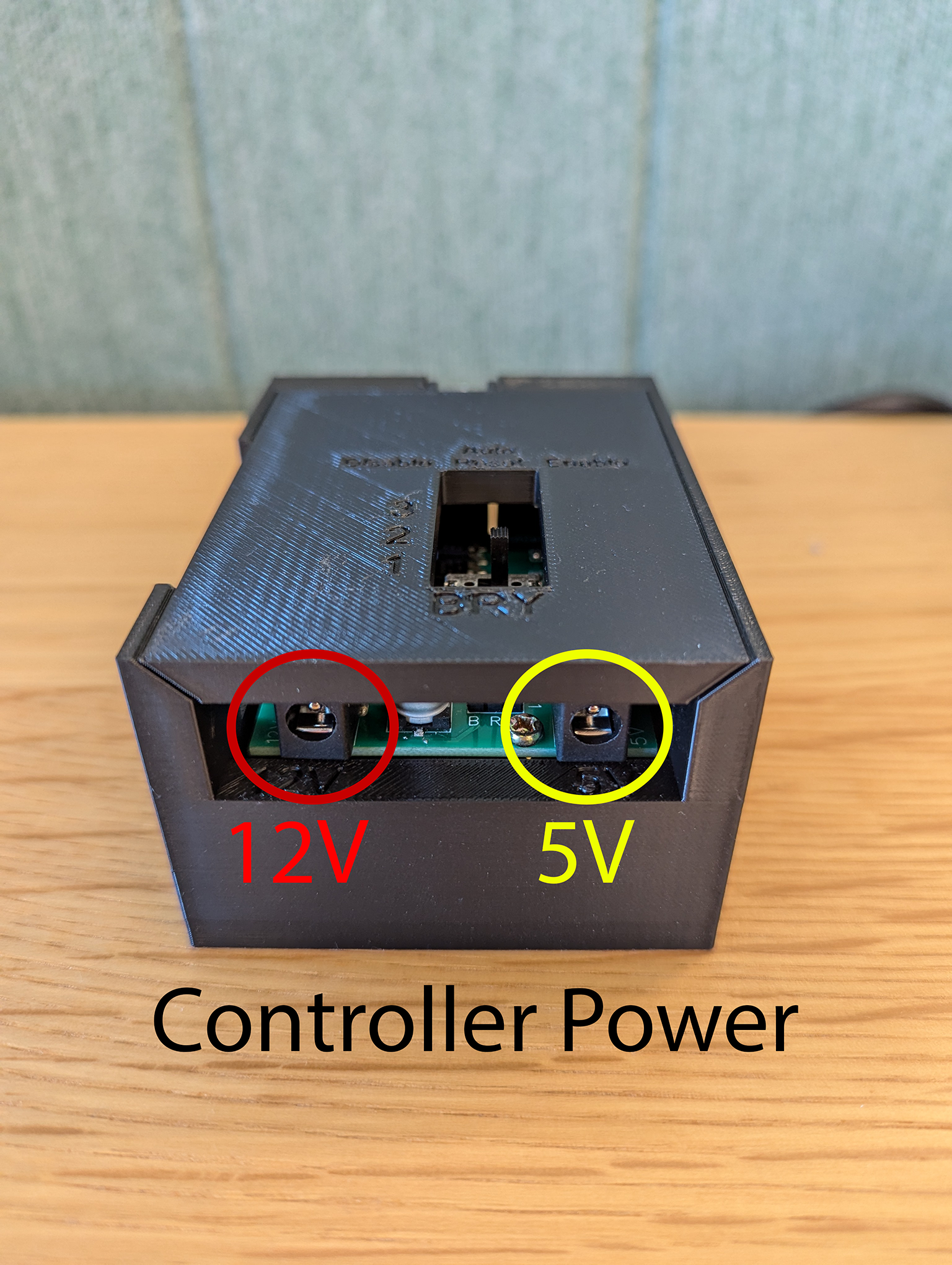
图 5. 电源适配器位置
将盒装 ITS 或传感器融合盒的灯连接到其中一个照明通道输出插孔(图 6)。根据照明电源的插头类型,酌情使用适配器(图 7)。

图 6. 照明通道输出位置

图 7. 将照明电源连接到控制器的适配器
如需为 sensor_fusion 场景进行设置,请将伺服器连接到其中一个伺服器通道连接头上。

图 8. 伺服器连接位置
对于修订版 3.0 控制器,将其连接到新主机时,必须将自动重置开关设置为
Enable。对于修订版 3.0,控制器配备了一个可启用或禁用的自动重置开关。在测试时,我们建议将自动重置开关设置为
Disable,防止在每次测试开始时,由于its_base_test与 Arduino 控制器建立通信而导致所有灯瞬间熄灭。在运行并行测试(即 ITS 与连接到同一控制器的测试装置照明系统同时运行)时,这尤为重要。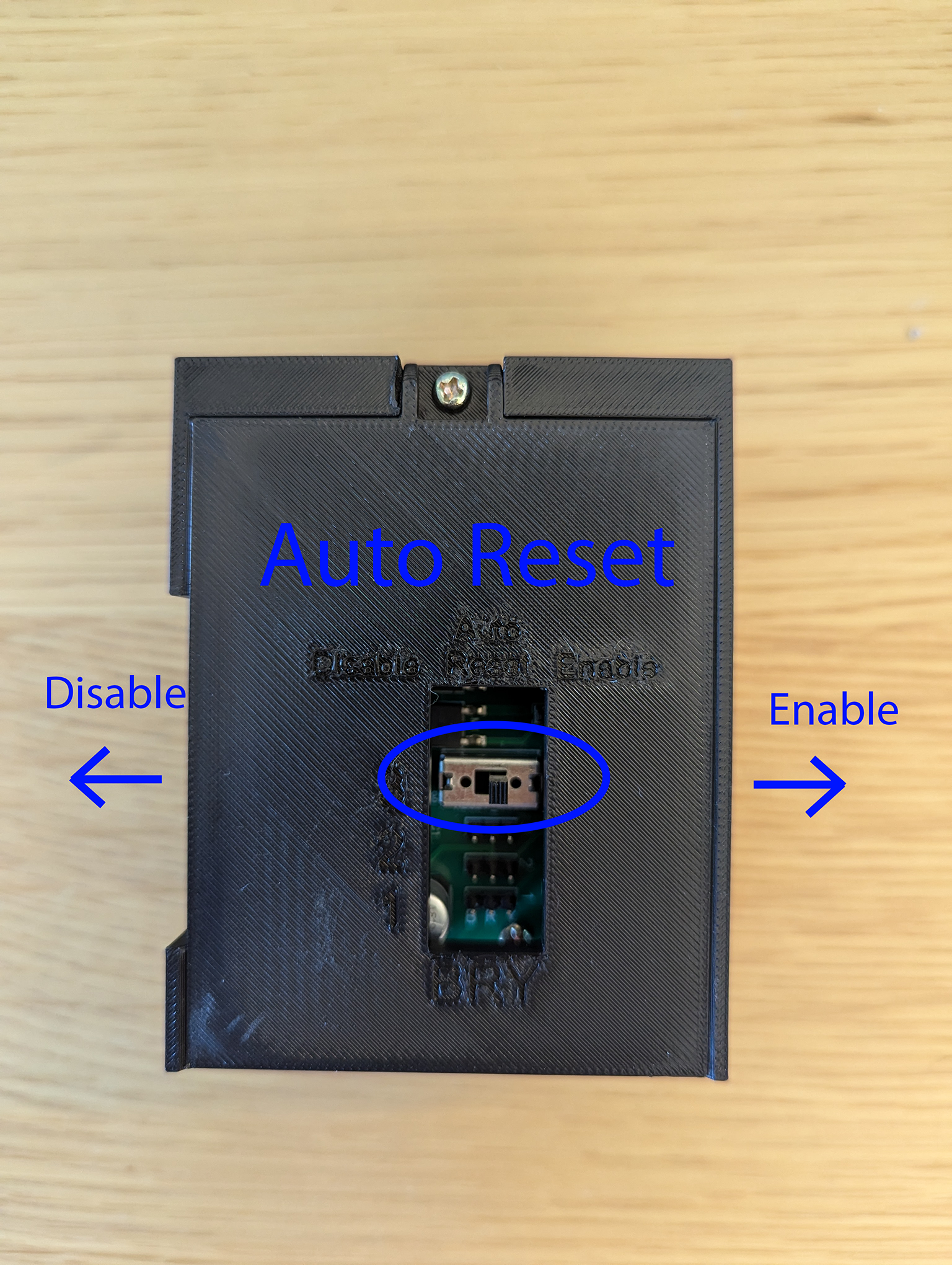
图 9. 自动重置开关
使用 USB-A 数据线将控制器连接到主机。

图 10. 连接到主机的 USB-A 连接端口
图 11 显示了为一个照明系统和伺服器完成的 Android 13 控制器设置示例。
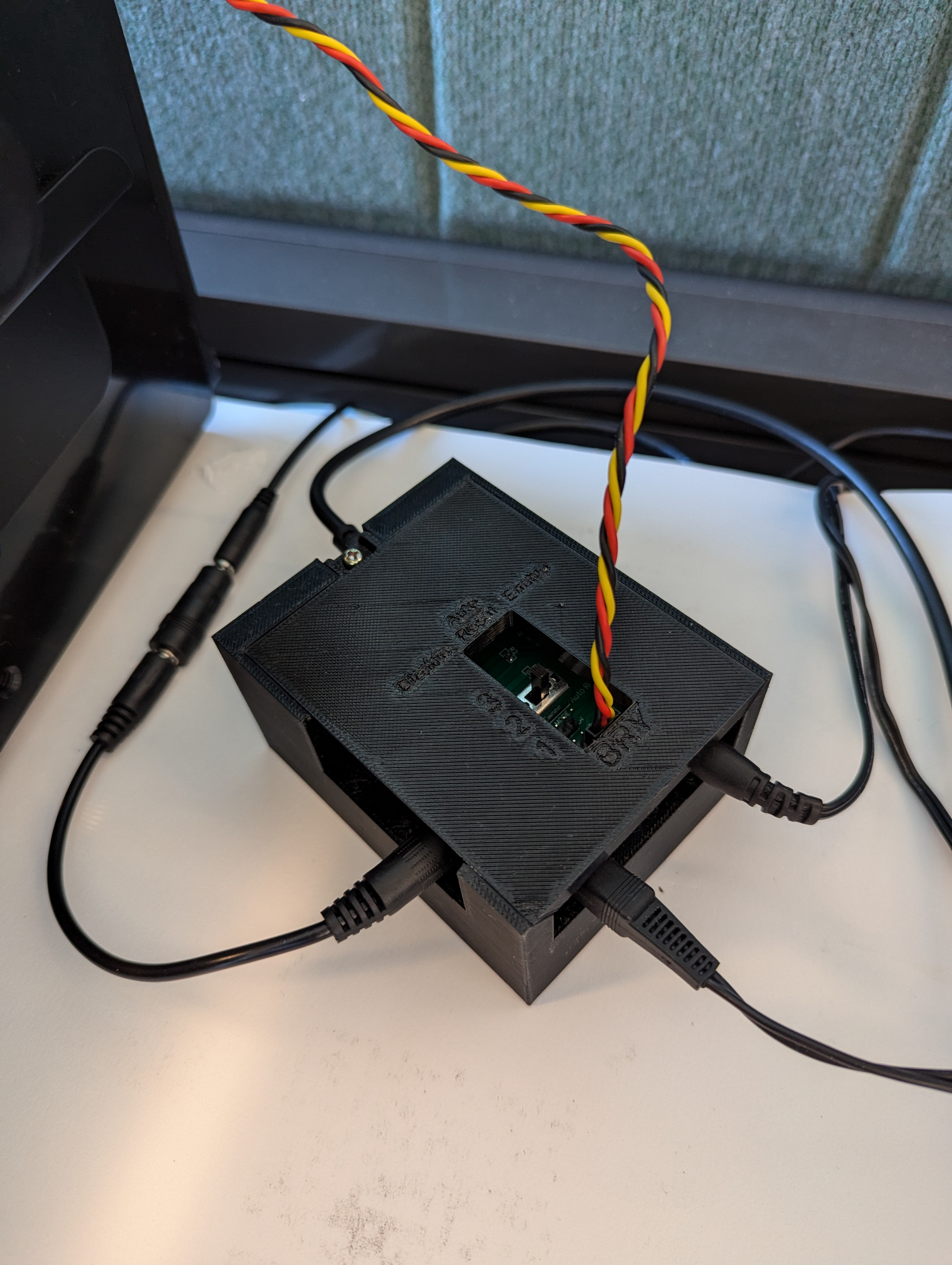
图 11. 已完成的 Android 13 控制器设置
来自主机的控制软件
可将微代码下载到 UNO,为电机信号分配 PWM 针脚,并为不同角度定义脉冲宽度范围。有关用于六台 HS-755MB 电机的伺服旋转控制的微代码,请参阅其他资源。该部分还包括一个名为 rotator.py 的简易程序的链接,该程序可以使伺服器旋转。
使用 Android 13 控制器
相机 ITS 的使用:
python tools/run_all_tests.py device=device_id camera=0 rot_rig=arduino:1 scenes=sensor_fusion
使用附带的测试脚本:
python rotator.py --ch 1 --dir ON --debug