
傳感器融合測試測量 Android 設備傳感器的時間戳精度,特別是相機圖像傳感器和陀螺儀。此頁面提供有關如何首次設置 Sensor Fusion 測試和 Sensor Fusion Box 的分步說明。
所需工具
在開始之前,請確保您具有以下組件:

- USB A 到 B 電纜
- USB A 到 C 線(用於測試手機)
- 12V 2A電源線(伺服控制箱用)
- 12V電源線(照明用,帶開關)
- 5V公對公連接線(照明用)
- 5V公母轉換線(照明用)
第 1 步:連接燈
連接燈:
- 用公對公排線連接燈底端的兩個燈,如圖2所示。將排線固定在箱體底部,以免排線乾擾操作。
- 將靠近光纜出口孔的燈端連接到轉換電纜
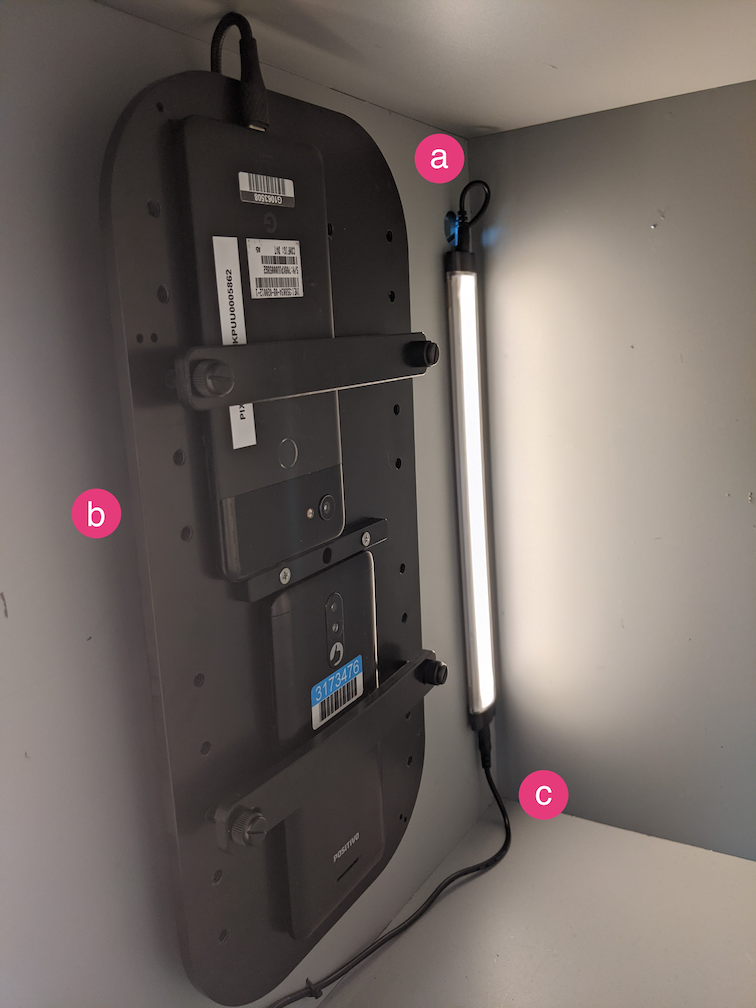
圖 2.將燈相互連接並將一盞燈連接到轉換電纜 - 光纜出線孔
- USB 線出線孔
- 5V公對公轉換線
- 將轉換線未連接的一端穿過盒子出口的圓孔,然後將其連接到電源線以進行照明。
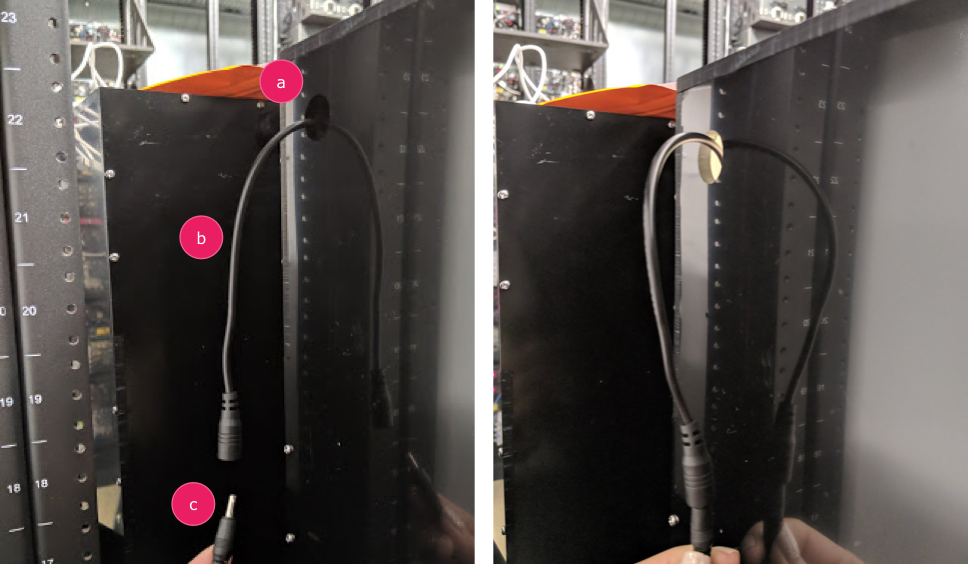
圖 3.照明轉換電纜從盒子出來並連接到電源線 - 出口孔
- 轉換電纜
- 電源線
第2步:連接伺服
要連接伺服:
- 將伺服連接器插入伺服控制。請務必按照標籤(Y = 黃色、R = 紅色、B = 黑色)的相應顏色插入連接器,因為顛倒順序可能會損壞電機。如果線太短,請使用伺服延長線。
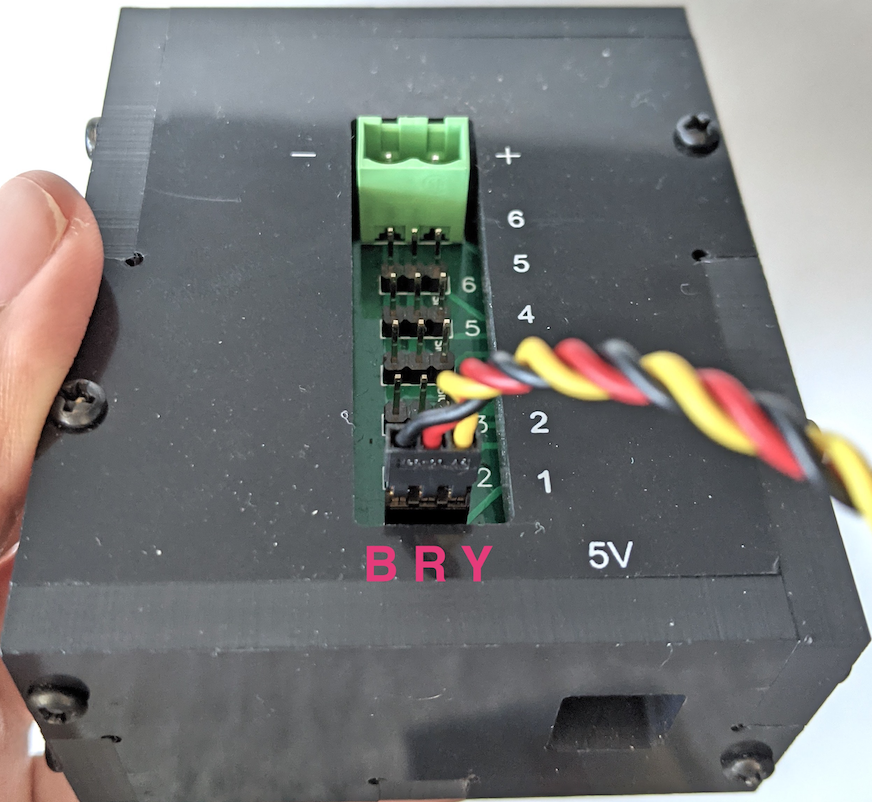
圖 4.伺服連接到伺服控制箱 - 用電源線連接伺服控制(照明和伺服控制有獨立的專用電源)。
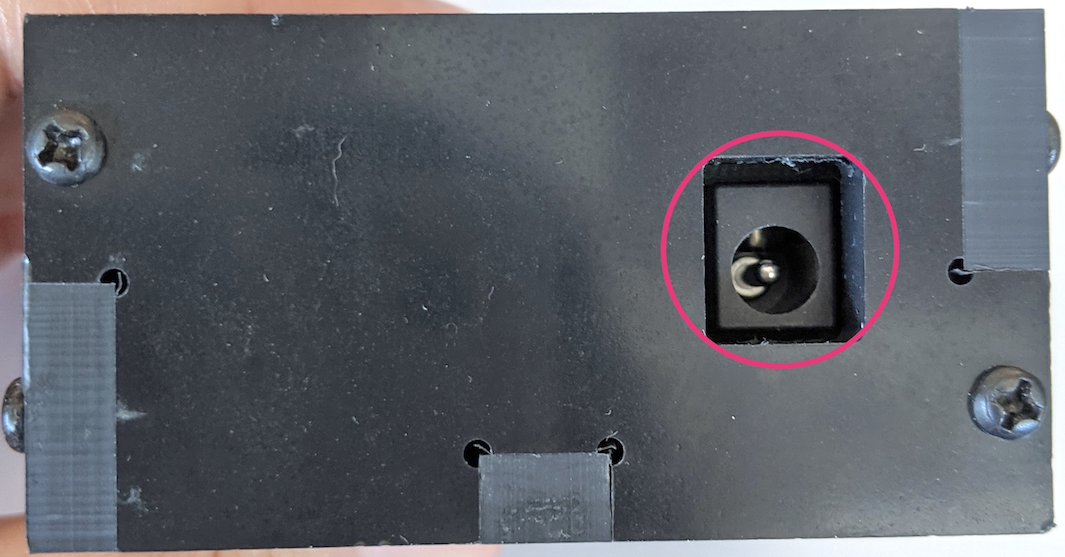
圖 5.將伺服控制器連接到其專用電源線 - 使用 USB A 到 B 電纜將伺服控制箱連接到主機(正在運行測試的機器)。
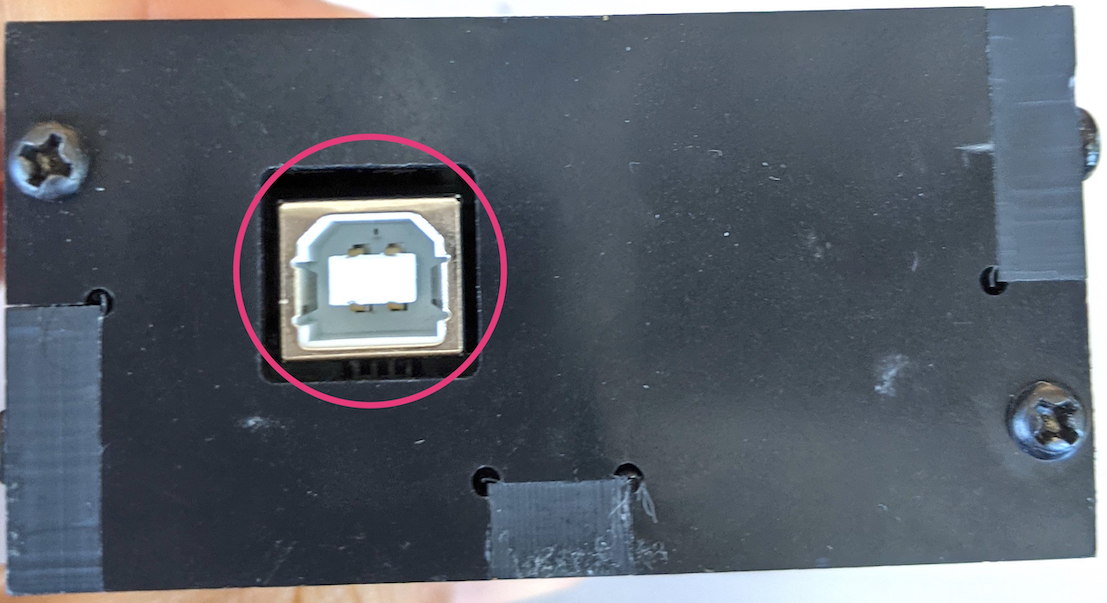
圖 6伺服控制箱與主機連接
第 3 步:連接手機
- 將手機放在夾具上並將其夾住。向右轉動尼龍螺絲擰緊。

圖 7.將手機放置並夾在夾具上 手機的放置方式應使 USB 線位於手機支架的外圍,而攝像頭靠近支架的中心。
- 使用束線帶將手機 USB 線固定在固定板上,然後通過出口孔將其引出盒子。將電源線的另一端插入運行測試的主機。
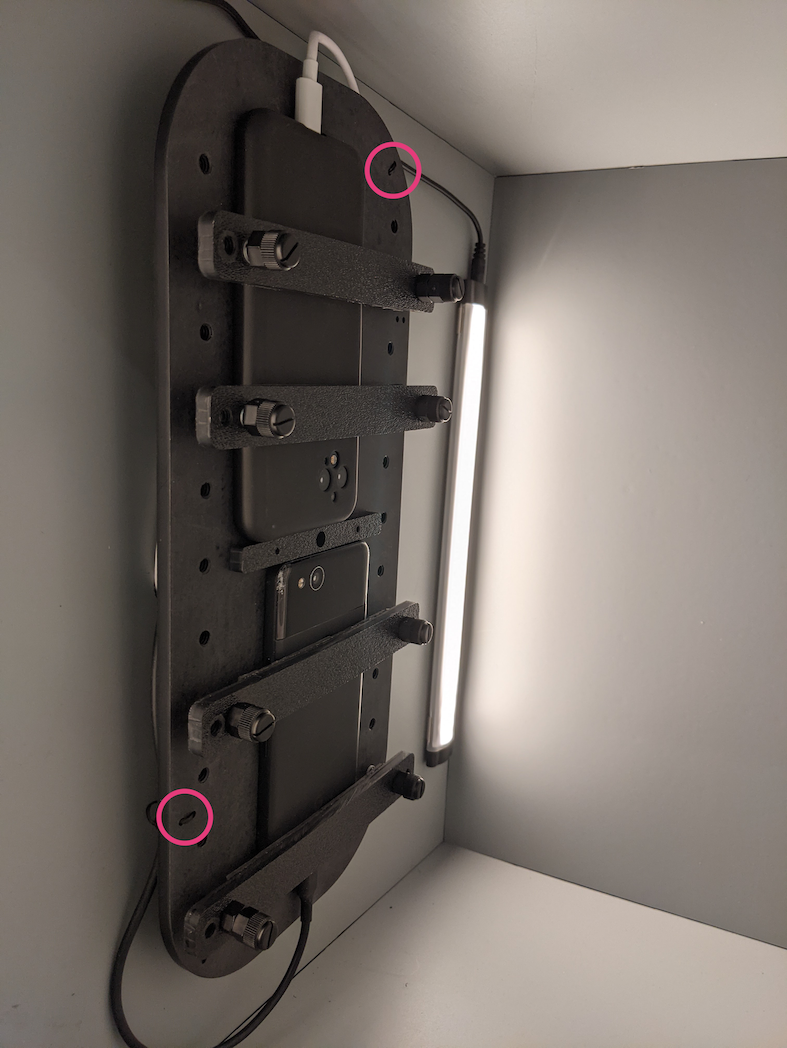
圖 8.用紮帶固定在固定裝置上的電話 USB 線
第 4 步:運行測試腳本
測試腳本的主要 python 可執行文件是:
python tools/run_all_tests.py device=ID camera=0 scenes=sensor_fusion rot_rig=default
您可以使用以下命令修改命令以指定實際的旋轉器地址:
rot_rig=VID:PID:CH
- 要確定供應商 ID (VID) 和產品 ID (PID),請使用 Linux 命令
lsusb。 - 默認情況下,VID 和 PID 設置為
04d8和fc73,通道為“1”。
多次運行,不同格式
要使用不同格式執行多次運行,您可以使用不同的腳本(但是,結果不會上傳到CtsVerifier.apk )。示例測試腳本:
python tools/run_sensor_fusion_box.py device=FA7831A00278 camera=0 rotator=default img_size=640,360 fps=30 test_length=7權限問題
解決通過 USB 端口控制電機相關的權限問題:
- 使用以下命令將操作員用戶名添加到
dialout組:sudo adduser USERNAME dialout - 註銷操作員。
- 登錄運營商。
視頻教程
這是有關如何設置傳感器融合盒的視頻教程。