
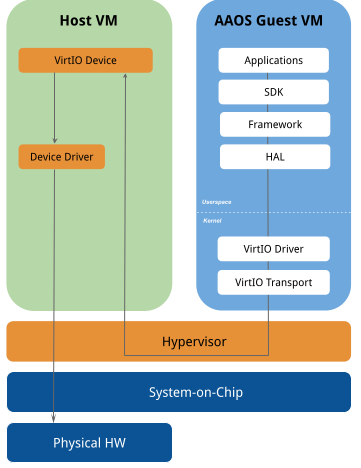
Sebagian besar perubahan yang diperlukan untuk mendukung VirtIO di AAOS melibatkan perubahan pada tingkat implementasi HAL dan di bawahnya di Android Common Kernel. Kerangka kerja Android berkomunikasi dengan HAL agnostik perangkat keras generik menggunakan driver VirtIO di kernel VM tamu AAOS, yang berkomunikasi dengan perangkat VirtIO di sisi host menggunakan protokol VirtIO. Perangkat VirtIO di sisi host dapat mengakses HW fisik menggunakan driver perangkat khusus SoC.
Komunikasi antara driver VirtIO dan perangkat VirtIO berlangsung dengan virtqueue , yang merupakan buffer cincin seperti DMA dari daftar pengumpul pencar. Beberapa transport, seperti MMIO atau PCI dapat digunakan untuk bertukar pesan VirtIO antar VM.
Dalam beberapa kasus, vsock telah dimanfaatkan untuk komunikasi antar-VM. Komunikasi HAL Kendaraan, Kontrol Audio, dan Dumpstate didukung menggunakan koneksi ke agen peer pada VM terpisah melalui antarmuka vsock . GRPC-vsock digunakan untuk mengakses subsistem non-standar ini. GRPC di pohon sumber Android telah dimodifikasi untuk bekerja dengan vsock dengan format alamat vsock:CID:PORT_NUMBER .
audio
Dalam AAOS tervirtualisasi, VM tamu Android dapat menggunakan virtio-snd untuk mengakses audio. virtio-snd menyediakan perangkat PCM tervirtualisasi ke VM Android sehingga implementasi audio HAL dapat berinteraksi dengan perangkat suara tervirtualisasi dengan perpustakaan TinyALSA.
Implementasi HAL audio default terletak di AOSP di /device/google/trout/hal/audio/6.0 . OEM dapat memodifikasi ro.vendor.trout.audiohal.{in,out}_period_{ms,count} untuk platform mereka. OEM juga dapat menerapkan HAL audio mereka sendiri dengan mengganti variabel terkait audio di /device/google/trout/aosp_trout_common.mk.
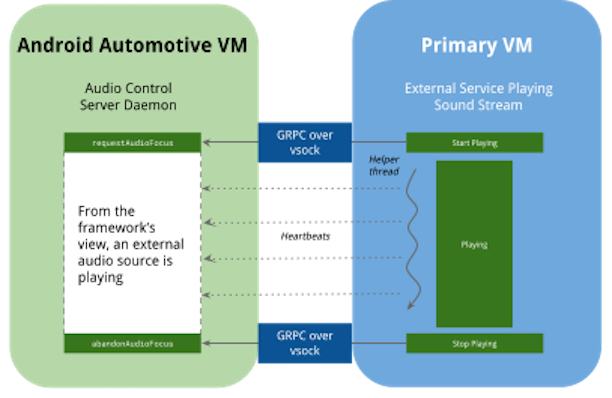
Kontrol audio HAL mengelola fokus audio di AAOS. Misalnya, saat sistem memutar suara darurat, musik yang diputar di latar belakang mungkin perlu dimatikan. Kontrol audio HAL akan memberi tahu aplikasi yang memutar musik untuk dibisukan dalam situasi ini. Dalam sistem virtual, suara mungkin berasal dari VM lain. Dalam implementasi referensi, VM tamu AAOS menjalankan daemon server kontrol audio, yang menggunakan GRPC-vsock untuk menerima permintaan fokus audio dari VM lain. Host VM dapat menggunakan device/google/trout/hal/audiocontrol/2.0/libandroid_audio_controller untuk mengirim permintaan kontrol audio ke AAOS. Sementara libandroid_audio_controller memegang fokus audio, itu akan terus mengirim detak jantung ke AAOS hingga fokus dilepaskan.
Bluetooth
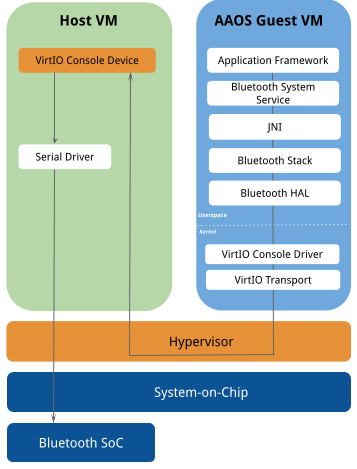
Implementasi Bluetooth didasarkan pada desain yang diilustrasikan di bawah ini.
Profil Bebas Genggam Bluetooth
Untuk mengaktifkan Bluetooth Hands-Free Profile (HFP) pada trout , spesifikasi perangkat suara VirtIO telah diperluas untuk mendukung kontrol audio. Dengan menggunakan pendekatan ini, perangkat suara VirtIO di sisi host/hypervisor menyediakan tiga kontrol audio berikut yang terkait dengan HFP:
-
hfp_enable -
hfp_set_sampling_rate -
hfp_volume
Saat AAOS berjalan sebagai VM tamu, AAOS menggunakan TinyAlsa untuk mengatur kontrol audio ini. Untuk mengaktifkan kasus penggunaan HFP, host/hypervisor melakukan perutean dan kalibrasi khusus vendor yang sesuai.
Implementasi Bluetooth didasarkan pada ilustrasi desain di bawah ini.
Tempat sampah
Saat membuat laporan bug untuk AAOS tervirtualisasi, sebaiknya sertakan informasi VM host sehingga pengembang memiliki pandangan yang lebih komprehensif tentang sistem. Untuk mencapai hal ini, implementasi referensi trout mengimplementasikan IDumpstateDevice HAL, yang mengumpulkan informasi VM host melalui GRPC-vsock . Informasi VM host yang dikemas dengan `tar` diberi nama dumpstate_board.bin dalam laporan bug sementara log dumping berada di dumpstate_board.txt .
Untuk mengonfigurasi perintah yang akan dieksekusi:
- Salin detail konfigurasi dari file di bawah ini ke file XML, misalnya,
config.xml.<dumpstateHalConfiguration version="1.0"> <services> <service name="coqos-virtio-blk" command="/bin/journalctl --no-pager -t coqos-virtio-blk"/> <service name="coqos-virtio-net" command="/bin/journalctl --no-pager -t coqos-virtio-net"/> <service name="coqos-virtio-video" command="/bin/journalctl --no-pager -t coqos-virtio-video"/> <service name="coqos-virtio-console" command="/bin/journalctl --no-pager -t coqos-virtio-console"/> <service name="coqos-virtio-rng" command="/bin/journalctl --no-pager -t coqos-virtio-rng"/> <service name="coqos-virtio-vsock" command="/bin/journalctl --no-pager -t coqos-virtio-vsock"/> <service name="coqos-virtio-gpu-virgl" command="/bin/journalctl --no-pager -t coqos-virtio-gpu-virgl"/> <service name="coqos-virtio-scmi" command="/bin/journalctl --no-pager -t coqos-virtio-scmi"/> <service name="coqos-virtio-input" command="/bin/journalctl --no-pager -t coqos-virtio-input"/> <service name="coqos-virtio-snd" command="/bin/journalctl --no-pager -t coqos-virtio-snd"/> <service name="dumpstate_grpc_server" command="/bin/journalctl --no-pager -t dumpstate_grpc_server"/> <service name="systemd" command="/bin/journalctl --no-pager -t systemd"/> <service name="systemctl" command="/bin/systemctl status"/> <service name="vehicle_hal_grpc_server" command="/bin/journalctl --no-pager -t vehicle_hal_grpc_server"/> </services> <systemLogs> <service name="dmesg" command="/bin/dmesg -kuPT"/> </systemLogs> </dumpstateHalConfiguration> - Lewati jalur file XML baru ke server dumpstate saat diluncurkan. Misalnya:
--config_file my_config.xml
Sistem Tampilan Diperluas (EVS)
Extended View System (EVS) digunakan untuk menampilkan video yang diambil oleh kamera pandangan belakang dan kamera surround-view. Dalam AAOS tervirtualisasi, tumpukan EVS dapat mengakses streaming video dari perangkat streaming V4L2 tervirtualisasi yang menggunakan driver VirtIO-video.
Modus garasi
Untuk informasi lebih lanjut, lihat Apa itu Mode Garasi? .
Masuk dan keluar dari mode Garasi dipicu oleh properti AP_POWER_STATE_REQ yang dikirim oleh HAL Kendaraan. Dalam mode virtualisasi, mode Garasi dipicu dari sisi host. VM host harus tetap menyala untuk menyediakan perangkat virtual untuk VM Android, hingga Android dimatikan. Server VHAL pada VM host mengirimkan sinyal shutdown ke VM tamu AAOS. Setelah menerima klien VHAL sinyal, VM AAOS memasuki mode Garasi dan mulai mengirim sinyal detak jantung untuk menjaga VM host tetap aktif.
Sistem satelit navigasi global (GNSS)
Di trout 1.0, dukungan untuk virtualisasi GNSS melalui virtio-console telah ditambahkan. Implementasinya mendukung pertukaran pengukuran mentah dan perbaikan lokasi dari tuan rumah ke tamu.
Format pertukaran data adalah CSV yang digunakan oleh aplikasi GnssLogger. Dalam implementasi referensi, karena driver GNSS asli tidak tersedia, data tiruan tersedia tetapi driver asli dapat diimplementasikan tanpa perubahan sisi tamu. Contoh agen host tiruan disediakan sebagai bagian dari kode sumber trout .
Implementasi saat ini mengharapkan inisialisasi GNSS dan Assisted GNSS (AGNSS) untuk ditangani oleh lingkungan OS host.

grafis
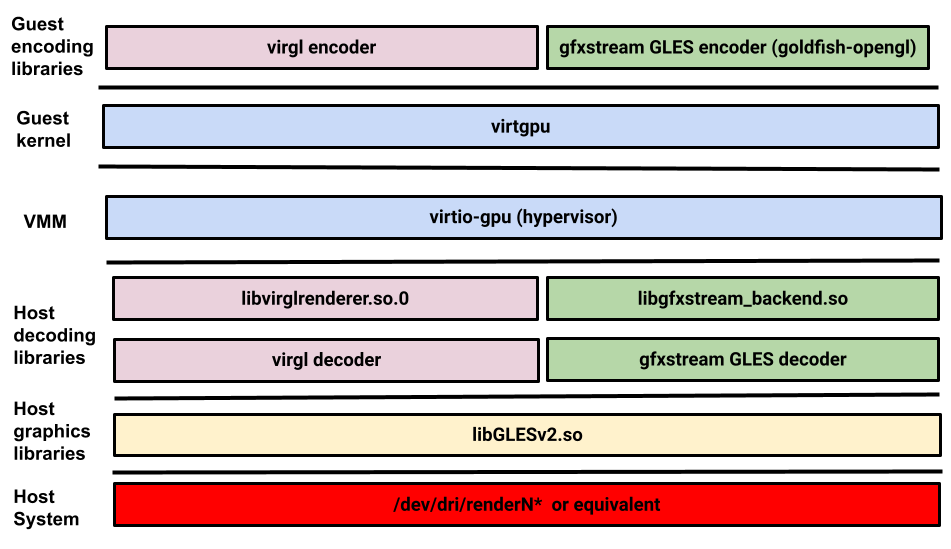
Saat AAOS berjalan sebagai VM tamu bersama sistem operasi otomotif lainnya, Android mungkin tidak memiliki akses langsung ke GPU atau pengontrol tampilan. Dalam hal ini, Mesa atau goldfish-opengl dan driver virtio-gpu pada VM tamu Android dan perangkat virtio-gpu dapat digunakan untuk mengakses GPU.
Pada VM tamu Android, Mesa atau goldfish-opengl mengkodekan perintah OpenGLES masing-masing ke dalam aliran Gallium atau aliran GLES yang dibuat secara otomatis. Driver kernel virtio-gpu digunakan sebagai transport. Di sisi host, virglrenderer (untuk Mesa) dan vulkan-cereal (untuk goldfish-opengl ) memutar ulang aliran perintah yang didekodekan di atas driver GPU yang ada. Trout platform referensi trout mendukung OpenGL ES hanya dengan dukungan Vulkan, yang diantisipasi dalam rilis mendatang.
Sensor
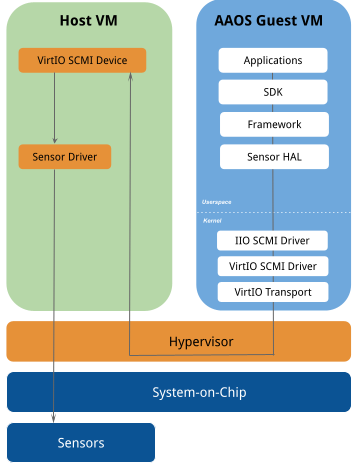
Saat AAOS berjalan sebagai VM tamu bersama sistem operasi otomotif lainnya, Android mungkin tidak memiliki akses langsung ke sensor. Dalam hal ini, driver Virtio-SCMI pada VM tamu Android dan perangkat VirtIO-SCMI pada VM Host digunakan untuk mengakses sensor. Platform referensi virtualisasi AAOS menyediakan HAL Sensor generik dan HW-agnostik yang dapat digunakan untuk SoC berbasis ARM untuk mengakses sensor.
Sensor HAL berkomunikasi dengan driver IIO SCMI di subsistem IIO Kernel Linux, yang menggunakan Protokol Manajemen Sensor SCMI yang disediakan oleh spesifikasi ARM System Control and Management Interface (SCMI) untuk menemukan dan mengonfigurasi sensor, membaca data sensor, dan diberitahu tentang sensor perubahan nilai.
Driver IIO SCMI menggunakan Driver VirtIO SCMI, yang menggunakan protokol transport VirtIO sebagaimana ditentukan dalam spesifikasi virtio-scmi untuk bertukar pesan SCMI dengan perangkat VirtIO SCMI pada host VM. Perangkat VirtIO SCMI memiliki akses langsung ke sensor melalui driver sensor khusus SoC.
Lokasi sensor HAL
Implementasi referensi dari sensor HAL, yang menggunakan VirtIO SCMI, terletak di device/google/trout/hal/sensors .
Konfigurasi sensor HAL
Sensor HAL mungkin perlu memodifikasi data sensor yang diterima dari Host VM agar sesuai dengan sistem koordinat sensor mobil Android. Skema untuk konfigurasi sensor dapat ditemukan di device/google/trout/hal/sensors/2.0/config/sensor_hal_configuration.xsd .
OEM dapat menyediakan konfigurasi sensor, seperti orientasi dan lokasi, di sensor_hal_configuration.xml dan menyalin file di /odm/etc/sensors/ atau /vendor/etc/sensors/ . Contoh konfigurasi sensor disediakan di bawah ini:
<sensorHalConfiguration version="1.0" xmlns:xi="http://www.w3.org/2001/XInclude">
<modules>
<module halName="android.hardware.sensors@2.0-Google-IIO-Subhal" halVersion="2.0">
<sensors>
<sensor name="scmi.iio.accel" type="1">
<configuration>
<!-- Attribute rotate denotes if HAL needs to modify the sensor data to comply with //
the Android car sensor coordinate system -->
<orientation rotate="true">
<!-- Attribute map denotes the indexes of data in sensor data received -->
<!-- Attribute negate denotes if data needs to be negated -->
<x map="0" negate="false"/>
<y map="1" negate="true"/>
<z map="2" negate="true"/>
</orientation>
<location>
<!-- Attribute x, y, z denotes location of the sensor placement -->
<x>10</x>
<y>15</y>
<z>20</z>
</location>
</configuration>
</sensor>
</sensors>
</module>
</modules>
</sensorHalConfiguration>
Kendaraan HAL
Implementasi HAL Kendaraan terdiri dari dua komponen:
- Klien. Menyediakan API yang digunakan oleh Android dalam AAOS tervirtualisasi
- Server. Berkomunikasi langsung dengan perangkat keras, seperti bus kendaraan (atau emulator).
Dalam virtualisasi, server VHAL berjalan pada VM host. Klien dan server VHAL berkomunikasi melalui GRPC-vsock (untuk informasi lebih lanjut, lihat device/google/trout/hal/vehicle/2.0/proto/VehicleServer.proto ). OEM dapat menggunakan protokol transport yang berbeda selain GRPC dengan mengganti API komunikasi. Sebagai contoh, lihat device/google/trout/hal/vehicle/2.0/GrpcVehicle{Client,Server}.cpp .
Subsistem lainnya
VirtIO sudah menyediakan antarmuka yang terdefinisi dengan baik untuk komponen seperti Block Storage, Network, Console, Input, Socket, dan Entropy. Untuk subsistem ini, AAOS menggunakan driver apa adanya, seperti virtio-blk , virtio-input , virtio-console , dan virtio-net .
Dalam platform referensi AAOS tervirtualisasi, Wi-Fi didukung dengan mac80211_hwsim untuk mengaktifkan jaringan nirkabel VirtWifi , yang kemudian menggunakan terowongan virtio-net untuk mengirim lalu lintas jaringan ke VM host, yang memiliki akses langsung ke jaringan Wi-Fi yang sebenarnya.