
A number of Camera ITS changes are included in the Android 12 release. This page summarizes the changes that fall into these broad categories:
Refactor to Python 3
Due to the Python 2.7 deprecation in January 2020, the entire Camera ITS codebase was refactored to Python 3. The following Python versions and libraries are required in Android 12:
- Python 3.7.9 or Python 3.7.10
- OpenCV 3.4.2
- Numpy 1.19.2
- Matplotlib 3.3.2
- Scipy 1.5.2
- pySerial 3.5
- Pillow 8.1.0
- PyYAML 5.3.1
The main test launcher, tools/run_all_tests.py, remains the same as versions
Android 11 or lower and is refactored to Python 3.
All individual tests are refactored and use the new test setup class defined in
tests/its_base_test.py. Most test names and functionality remain the same.
In Android 12, all individual tests load their scenes. While scene loading for
each test increases overall test time, it enables debugging of individual tests.
For more information on individual test changes, see Test changes.
The following Python modules are refactored with a name change:
pymodules/its/caps.py→utils/camera_properties_utils.pypymodules/its/cv2image.py→utils/opencv_processing_utils.pypymodules/its/device.py→utils/its_session_utils.pypymodules/its/error.py→utils/error_util.pypymodules/its/image.py→utils/image_processing_utils.pypymodules/its/objects.py→utils/capture_request_utils.pypymodules/its/target.py→utils/target_exposure_utils.pytools/hw.py→utils/sensor_fusion_utils.py
Mobly test framework adoption
Mobly is a Python-based test framework supporting test cases that require multiple devices with custom hardware setups. Camera ITS uses the Mobly test infrastructure to enable better control and logging of the tests.
Camera ITS uses the Mobly test infrastructure to enable better control and logging of the tests. Mobly is a Python-based test framework supporting test cases that require multiple devices with custom hardware setups. For more information on Mobly, see google/mobly.
config.yml files
With the Mobly framework, you can set up a device under test (DUT) and a chart
tablet in the its_base_test class. A config.yml (YAML) file is used to
create a Mobly testbed. Multiple testbeds can be configured within this config
file, for example, a tablet and a sensor fusion testbed. Within each testbed's
controller section, you can specify device_ids to
identify the appropriate Android devices to the test runner. In addition to the
device IDs, other parameters such as tablet brightness, chart_distance,
debug_mode, camera_id, and scene_id are passed in the test class. Common
test parameter values are:
brightness: 192 (all tablets except Pixel C)
chart_distance: 31.0 (rev1/rev1a box for FoV < 90° cameras)
chart_distance: 22.0 (rev2 test rig for FoV > 90° cameras)
Tablet-based testing
For tablet-based testing, the keyword TABLET must be present in the testbed
name. During initialization, the Mobly test runner initializes TestParams
and passes them to the individual tests.
The following is a sample config.yml file for tablet-based runs.
TestBeds:
- Name: TEST_BED_TABLET_SCENES
# Test configuration for scenes[0:4, 6, _change]
Controllers:
AndroidDevice:
- serial: 8A9X0NS5Z
label: dut
- serial: 5B16001229
label: tablet
TestParams:
brightness: 192
chart_distance: 22.0
debug_mode: "False"
chart_loc_arg: ""
camera: 0
scene: <scene-name> # if <scene-name> runs all scenes
The testbed can be invoked using tools/run_all_tests.py. If no command line
values are present, the tests run with the config.yml file values.
Additionally, you can override the camera and scene config file values at
the command line using commands similar to Android 11
or lower.
For example:
python tools/run_all_tests.py
python tools/run_all_tests.py camera=1
python tools/run_all_tests.py scenes=2,1,0
python tools/run_all_tests.py camera=1 scenes=2,1,0
Sensor fusion testing
For sensor fusion testing,
the testbed name must include the keyword
SENSOR_FUSION. The correct testbed is determined by the
scenes tested. Android 12 supports both Arduino
and Canakit
controllers for sensor fusion.
The following is a sample config.yml file for sensor fusion runs.
Testbeds
- Name: TEST_BED_SENSOR_FUSION
# Test configuration for sensor_fusion/test_sensor_fusion.py
Controllers:
AndroidDevice:
- serial: 8A9X0NS5Z
label: dut
TestParams:
fps: 30
img_size: 640,480
test_length: 7
debug_mode: "False"
chart_distance: 25
rotator_cntl: arduino # cntl can be arduino or canakit
rotator_ch: 1
camera: 0
To run sensor fusion tests with the sensor fusion test rig, use:
python tools/run_all_tests.py scenes=sensor_fusion
python tools/run_all_tests.py scenes=sensor_fusion camera=0
Multiple testbeds
Multiple testbeds can be included in the config file. The most common combination is to have both a tablet testbed and a sensor fusion testbed.
The following is a sample config.yml file with both tablet and sensor fusion
testbeds.
Testbeds
- Name: TEST_BED_TABLET_SCENES
# Test configuration for scenes[0:4, 6, _change]
Controllers:
AndroidDevice:
- serial: 8A9X0NS5Z
label: dut
- serial: 5B16001229
label: tablet
TestParams:
brightness: 192
chart_distance: 22.0
debug_mode: "False"
chart_loc_arg: ""
camera: 0
scene: <scene-name> # if <scene-name> runs all scenes
- Name: TEST_BED_SENSOR_FUSION
# Test configuration for sensor_fusion/test_sensor_fusion.py
Controllers:
AndroidDevice:
- serial: 8A9X0NS5Z
label: dut
TestParams:
fps: 30
img_size: 640,480
test_length: 7
debug_mode: "False"
chart_distance: 25
rotator_cntl: arduino # cntl can be arduino or canakit
rotator_ch: 1
camera: 0
Manual testing
Manual testing continues to be supported in Android 12.
However, the testbed must identify
testing as such with the keyword MANUAL in the testbed name. Additionally, the
testbed can't include a tablet ID.
The following is a sample config.yml file for manual testing.
TestBeds:
- Name: TEST_BED_MANUAL
Controllers:
AndroidDevice:
- serial: 8A9X0NS5Z
label: dut
TestParams:
debug_mode: "False"
chart_distance: 31.0
camera: 0
scene: scene1
Test scenes without tablets
Testing for scene 0 and scene 5 can be done with TEST_BED_TABLET_SCENES or
with TEST_BED_MANUAL. However, if testing is done with
TEST_BED_TABLET_SCENES, the tablet must be connected and the tablet serial ID
must be valid even though the tablet isn't used because the test class setup
assigns the serial ID value for the tablet.
Run individual tests
Individual tests can be run only for debug purposes because their results aren't
reported to CTS Verifier. Because the
config.yml files can't be overwritten at the command line for camera and
scene, these parameters must be correct in the config.yml file for the
individual test in question. Additionally, if there is more than one testbed in
the config file, you must
specify the testbed with the --test_bed flag. For example:
python tests/scene1_1/test_black_white.py --config config.yml --test_bed TEST_BED_TABLET_SCENES
Test artifacts
In Android 12, test artifacts for Camera ITS are stored similarly to Android 11 or lower but with the following changes:
- The test artifact
/tmpdirectory hasCameraITS_prepended to the 8-character random string for clarity. - Test output and errors are stored in
test_log.DEBUGfor each test instead oftest_name_stdout.txtandtest_name_stderr.txt. - The DUT and tablet logcats from each individual test are in stored
the
/tmp/CameraITS_########directory simplifying debugging as all information required to debug 3A issues are logged.
Test changes
In Android 12 the tablet scenes are PNG files rather than PDF files. Use of PNG files enables more tablet models to display the scenes properly.
scene0/test_jitter.py
The test_jitter test runs on physical
hidden cameras in Android 12.
scene1_1/test_black_white.py
For Android 12, test_black_white has
the functionality of both test_black_white and
test_channel_saturation.
The following table describes the two individual tests in Android 11.
| Test name | First API level | Assertions |
|---|---|---|
scene1_1test_black_white.py |
ALL | Short exposure, low gain RGB values ~[0, 0, 0] Long exposure, high gain RGB values ~[255, 255, 255] |
scene1_1test_channel_saturation.py |
29 | Reduced tolerance on [255, 255, 255] differences to eliminate color tint in white images. |
The following table describes the merged test, scene1_1/test_black_white.py, in Android 12.
| Test name | First API level | Assertions |
|---|---|---|
scene1_1test_black_white.py |
ALL | Short exposure, low gain RGB values ~[0, 0, 0] Long exposure, high gain RGB values ~[255, 255, 255] and reduced tolerance between values to eliminate color tint in white images. |
scene1_1/test_burst_sameness_manual.py
The test_burst_sameness_manual test runs on physical
hidden cameras in Android 12.
scene1_2/test_tonemap_sequence.py
The test_tonemap_sequence test runs on LIMITED cameras in Android
12.
scene1_2/test_yuv_plus_raw.py
The test_yuv_plus_raw test runs on physical
hidden cameras in Android 12.
scene2_a/test_format_combos.py
The test_format_combos test runs on LIMITED cameras in Android
12.
scene3/test_flip_mirror.py
The test_flip_mirror test runs on LIMITED cameras in Android
12.
scene4/test_aspect_ratio_and_crop.py
Finding circles in scene4/test_aspect_ratio_and_crop.py was refactored in
Android 12.
Earlier Android versions used a method that involved finding a child contour (the circle) inside the parent contour (the square) with filters for size and color. Android 12 uses a method that involves finding all contours and then filtering by finding features that are the most circlish. To screen out spurious circles on the display, there is a minimum contour area required, and the contour of the circle must be black.
The contours and their selection criteria are shown in the following image.
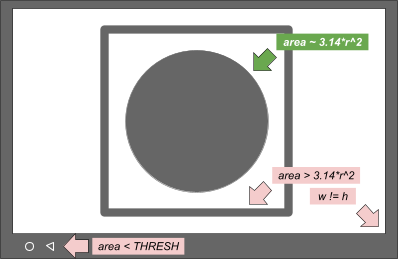
Figure 1. Conceptual drawing of contours and selection criteria.
The Android 12 method is simpler and works to resolve the issue with bounding box clipping in some display tablets. All circle candidates are logged for debugging purposes.
In Android 12, the crop test is run for FULL and LEVEL3
devices. Android 11 or lower versions skip the crop
test assertions for FULL devices.
The following table lists the assertions for
test_aspect_ratio_and_crop.py that correspond to a given device level and
first API level.
| Device level | First API level | Assertions |
|---|---|---|
| LIMITED | ALL | Aspect ratio FoV for 4:3, 16:9, 2:1 formats |
| FULL | < 31 | Aspect ratio FoV for 4:3, 16:9, 2:1 formats |
| FULL | ≥ 31 | Crop Aspect ratio FoV for 4:3, 16:9, 2:1 formats |
| LEVEL3 | ALL | Crop Aspect ratio FoV for 4:3, 16:9, 2:1 formats |
scene4/test_multi_camera_alignment.py
The method undo_zoom() for YUV captures in
scene4/test_multi_camera_alignment.py was refactored to account more
accurately for cropping on sensors that don't match the capture's aspect ratio.
Android 11 Python 2 code
zoom_ratio = min(1.0 * yuv_w / cr_w, 1.0 * yuv_h / cr_h)
circle[i]['x'] = cr['left'] + circle[i]['x'] / zoom_ratio
circle[i]['y'] = cr['top'] + circle[i]['y'] / zoom_ratio
circle[i]['r'] = circle[i]['r'] / zoom_ratio
Android 12 Python 3 code
yuv_aspect = yuv_w / yuv_h
relative_aspect = yuv_aspect / (cr_w/cr_h)
if relative_aspect > 1:
zoom_ratio = yuv_w / cr_w
yuv_x = 0
yuv_y = (cr_h - cr_w / yuv_aspect) / 2
else:
zoom_ratio = yuv_h / cr_h
yuv_x = (cr_w - cr_h * yuv_aspect) / 2
yuv_y = 0
circle['x'] = cr['left'] + yuv_x + circle['x'] / zoom_ratio
circle['y'] = cr['top'] + yuv_y + circle['y'] / zoom_ratio
circle['r'] = circle['r'] / zoom_ratio
sensor_fusion/test_sensor_fusion.py
In Android 12, a method for detecting features in images is added for the sensor fusion test.
In Android 11 and lower, the entire image is used to find the best 240 features, which are then masked to the center 20% to avoid rolling shutter effects with the minimum feature requirement being 30 features.
If the features found by this method are insufficient, Android 12 masks the feature detection area to the center 20% first, and limits the maximum features to two times the minimum feature requirement.
The following image shows the difference between Android 11 and Android 12 feature detection. Raising the minimum feature requirement threshold results in the detection of poor quality features and negatively affects measurements.
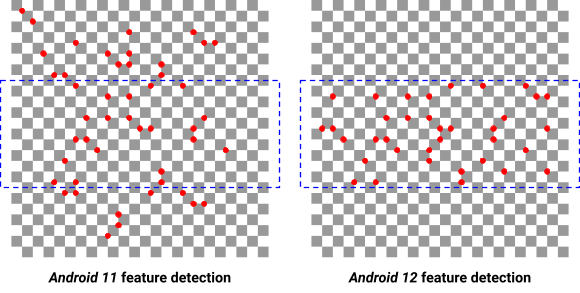
Figure 2. Difference in feature detection between Android 11 and Android 12.
New tests
scene0/test_solid_color_test_pattern.py
A new test, test_solid_color_test_pattern, is enabled for Android
12. This test is enabled for all cameras and is
described in the following table.
| Scene | Test name | First API level | Description |
|---|---|---|---|
| 0 | test_solid_color_test_pattern |
31 | Confirms solid color image output and image color programmability. |
Solid color test patterns must be enabled to support the camera privacy mode.
The test_solid_color_test_pattern test confirms solid color YUV image output
with the color defined by the pattern selected, and image color changes
according to specification.
Parameters
cameraPrivacyModeSupport: Determines whether the camera supports privacy mode.android.sensor.testPatternMode: Sets the test pattern mode. This test usesSOLID_COLOR.android.sensor.testPatternData: Sets the R, Gr, Gb, G test pattern values for the test pattern mode.
For a description of the solid color test pattern, see
SENSOR_TEST_PATTERN_MODE_SOLID_COLOR.
Method
YUV frames are captured for the parameters set and the image content
is validated. The test pattern is output directly from the image sensor,
so no particular scene is required. If PER_FRAME_CONTROL is
supported, a single YUV frame is captured for each setting tested. If
PER_FRAME_CONTROL isn't supported, four frames are captured with only the
last frame analyzed to maximize test coverage in LIMITED cameras.
YUV captures are set to fully saturated BLACK, WHITE, RED, GREEN, and
BLUE test patterns. As the test pattern definition is per the sensor Bayer
pattern, the color channels must be set for each color as shown in the
following table.
| Color | testPatternData (RGGB) |
|---|---|
| BLACK |
(0, 0, 0, 0)
|
| WHITE |
(1, 1, 1, 1)
|
| RED |
(1, 0, 0, 0)
|
| GREEN |
(0, 1, 1, 0)
|
| BLUE |
(0, 0, 0, 1)
|
Assertion table
The following table describes the test assertions for
test_solid_color_test_pattern.py.
| Camera First API level |
Camera type | Colors asserted |
|---|---|---|
| 31 | Bayer | BLACK, WHITE, RED, GREEN, BLUE |
| 31 | MONO | BLACK, WHITE |
| < 31 | Bayer/MONO | BLACK |
Performance class tests
scene2_c/test_camera_launch_perf_class.py
Verifies camera startup is less than 500 ms for both front and rear primary cameras with the scene2_c face scene.
scene2_c/test_jpeg_capture_perf_class.py
Verifies 1080p JPEG capture latency is less than 1 second for both front and rear primary cameras with the scene2_c face scene.