
Test fuzji danych z czujników mierzy dokładność sygnatury czasowej czujników na urządzeniach z Androidem, w szczególności czujników obrazowych aparatu i żyroskopów. Ta strona zawiera szczegółowe instrukcje konfigurowania testu Sensor Fusion i Sensor Fusion Box po raz pierwszy.
Samouczek wideo
Ten film instruktażowy pokazuje, jak skonfigurować skrzynkę sensora.
Wymagane narzędzia
Zanim zaczniesz, sprawdź, czy masz te komponenty:

- Kabel USB A na B
- Kabel USB A na C (do testowania telefonu)
- Przewód zasilający 12 V 2 A (do skrzynki sterującej siłownikiem)
- przewód zasilający 12 V (do oświetlenia, z przełącznikiem);
- Kabel połączeniowy 5 V z wtyczką męską (do oświetlenia)
- Kabel konwertujący 5 V (męsko-żeński) (do oświetlenia)
Krok 1. Połącz światła
Aby połączyć światła:
- Użyj kabla z wtykiem męskim po obu stronach, aby połączyć 2 lampy w dolnej części, jak pokazano na rysunku 2. Przymocuj kabel do spodu pudełka, aby nie przeszkadzał w działaniu.
- Podłącz koniec światła bliżej otworu wyjściowego kabla do światła do kabla konwertującego.
Rysunek 2. Łączenie światła z innymi światłami i jednego światła z przewodem konwersji - Otwór na wyjście kabla światła
- Otwór na kabel USB
- Kabel konwertujący 5 V, wtyk męski–wtyk męski
- Przeciągnij nieprzyłączony koniec kabla konwertującego przez okrągłe otwory w obudowie, a potem podłącz go do kabla zasilającego oświetlenia.
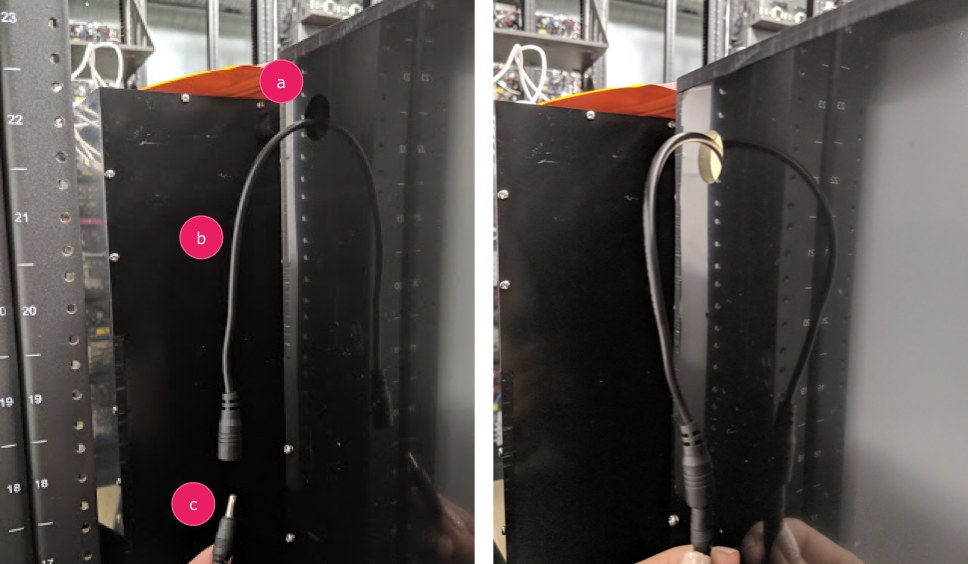
Rysunek 3. Kabel do konwersji z gniazda Lightning wychodzący z obudowy i podłączony do kabla zasilającego - Otwór wyjściowy
- Kabel konwersji
- Kabel zasilający
Krok 2. Podłącz serwomechanizm
Aby przymocować serwomechanizm:
- Podłącz złącze serwomechanizmu do sterownika serwomechanizmu. Pamiętaj, aby wkładać złączkę zgodnie z odpowiednimi kolorami (Y = żółty, R = czerwony, B = czarny), ponieważ odwrócenie kolejności może spowodować uszkodzenie silnika. Jeśli kabel jest za krótki, użyj
przedłużacza serwomechanizmów.
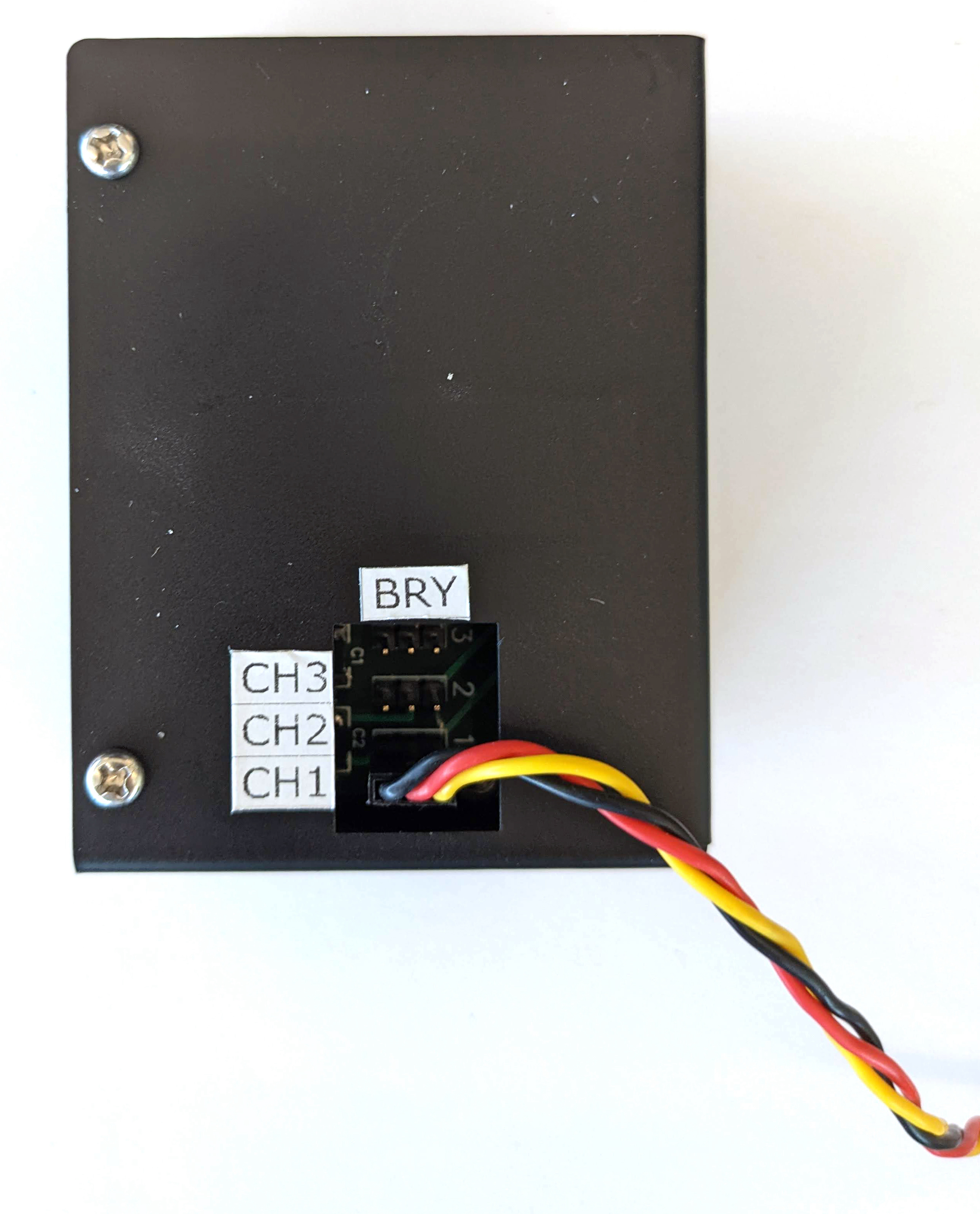
Rysunek 4. Serwomechanizm podłączony do skrzynki sterowania - Podłącz sterownik serwo do przewodu zasilającego (oświetlenie i sterownik serwo mają niezależne, dedykowane źródła zasilania).

Rysunek 5. Podłączanie sterownika serwo do jego dedykowanego przewodu zasilającego - Użyj kabla USB A–B, aby połączyć moduł sterujący siłownikiem z hostem (maszyną, na której przeprowadzany jest test).
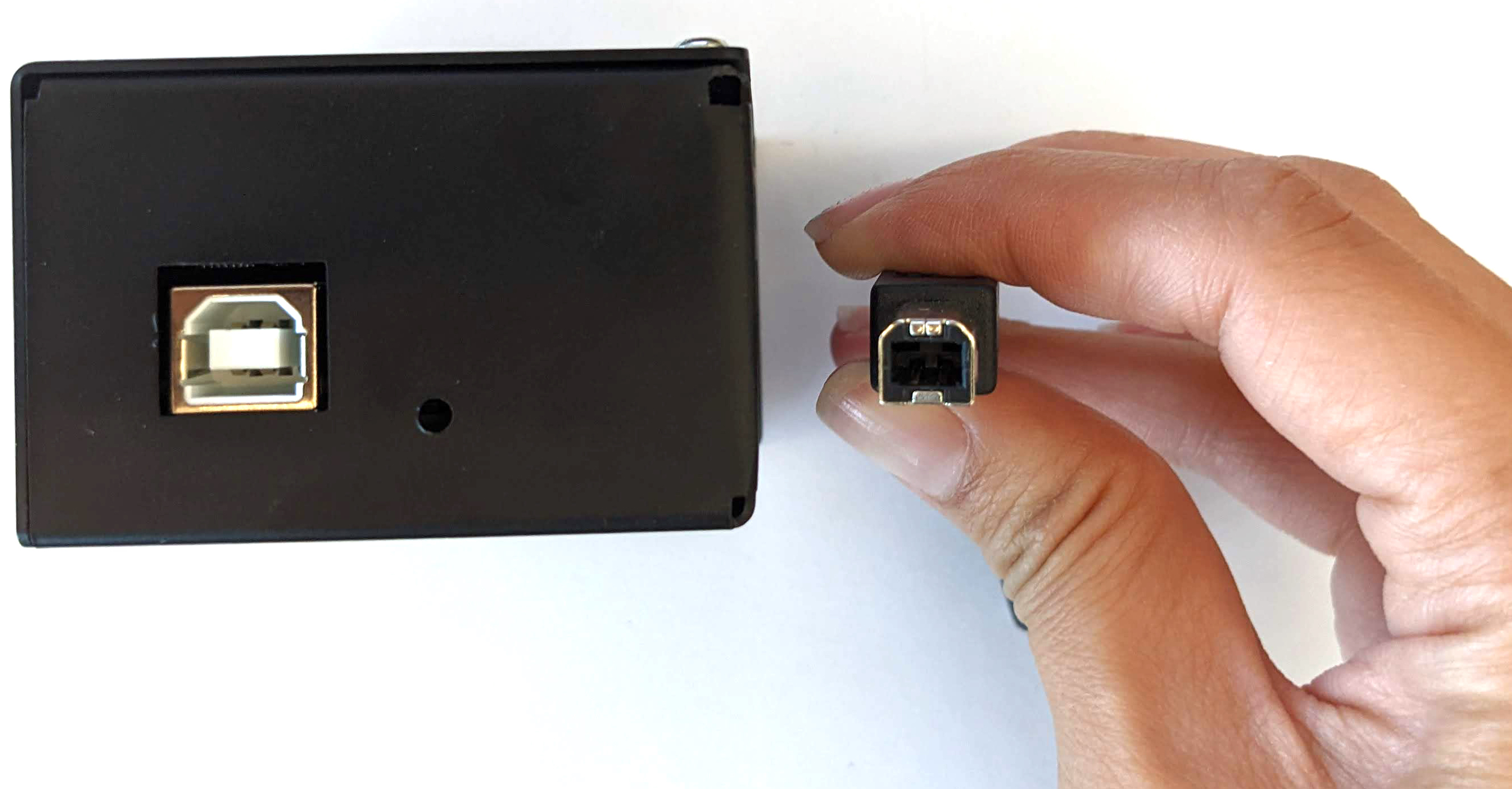
Rysunek 6. Podłączanie modułu sterowania siłownikiem do maszyny gospodarza
Krok 3. Podłącz telefon
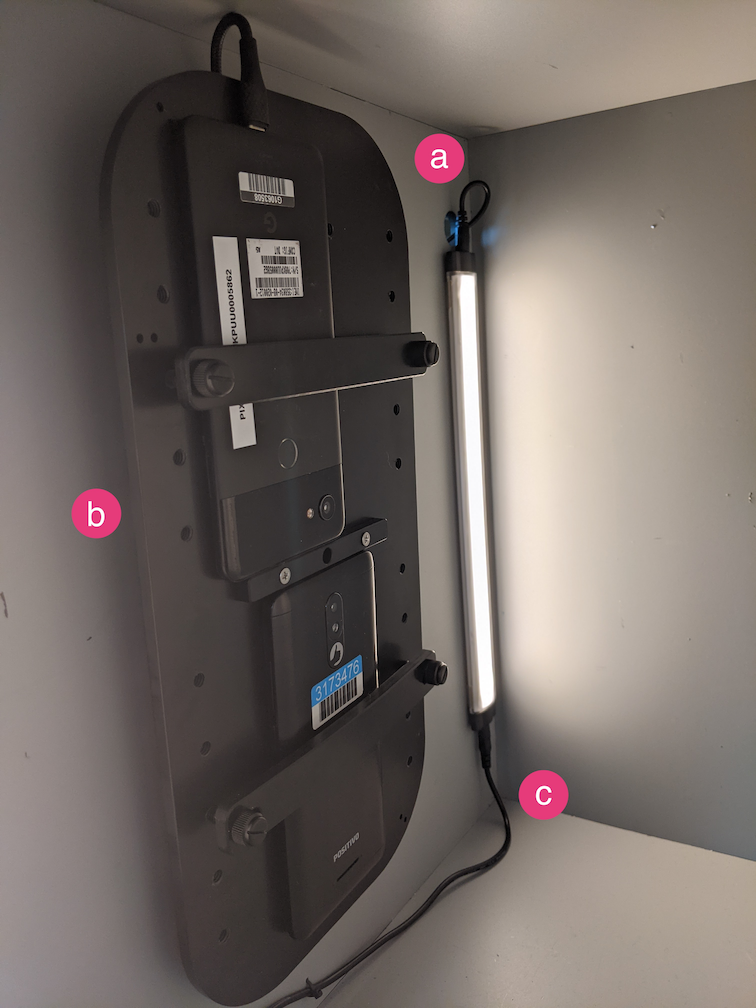
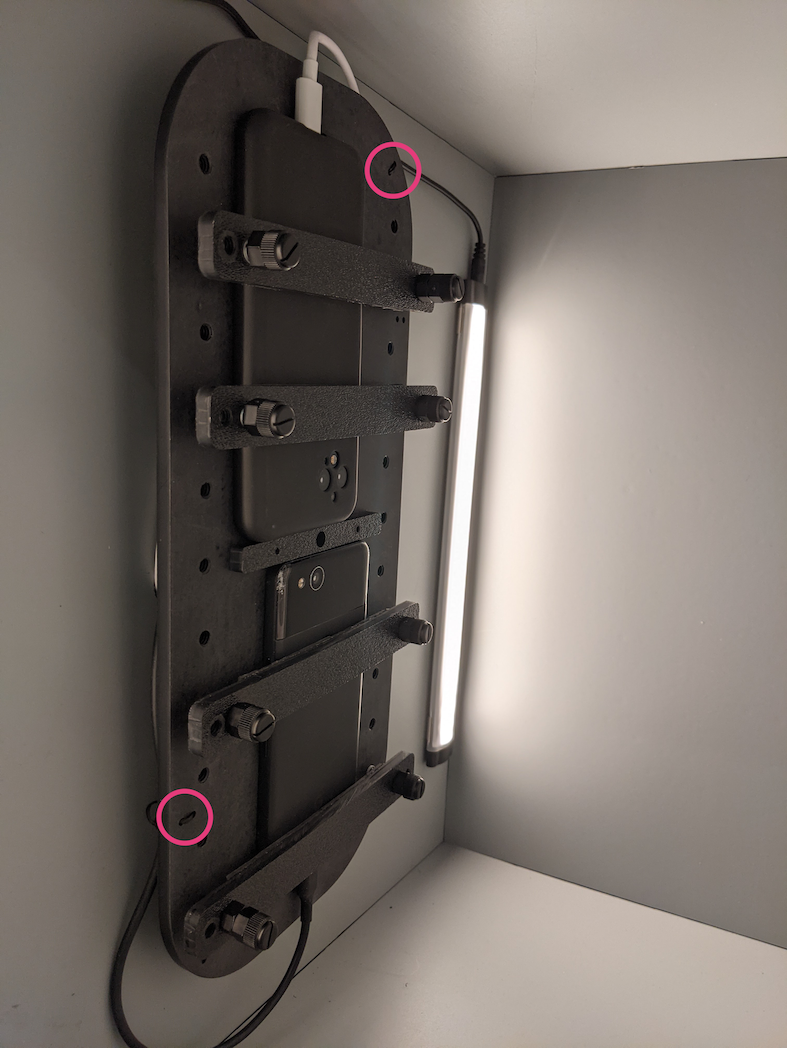
- Umieść telefon na uchwycie i zaciśnij szczęki. Dokręć nylonową śrubę w prawo.

Rysunek 7. Umieszczenie i zamocowanie telefonu na uchwycie Telefony powinny być umieszczone w taki sposób, aby kable USB znajdowały się na obrzeżach uchwytu, a kamery – w pobliżu środka uchwytu.
- Użyj opaski zaciskowej, aby przymocować kabel USB telefonu do płytki uchwytu, a potem wyprowadzić go na zewnątrz pudełka przez otwór wyjściowy. Drugi koniec kabla podłącz do hosta przeprowadzającego test.
Rysunek 8. Kabel USB telefonu przymocowany do uchwytu za pomocą opasek zaciskowych
Krok 4. Uruchom skrypt testowy
Główny plik wykonywalny Pythona dla skryptu testowego:
python tools/run_all_tests.py device=ID camera=0 scenes=sensor_fusion rot_rig=default
Aby określić rzeczywisty adres rotacyjny, możesz zmodyfikować polecenie, używając:
rot_rig=VID:PID:CH
- Aby określić identyfikator dostawcy (VID) i identyfikator produktu (PID), użyj polecenia
lsusbw systemie Linux. - Domyślnie VID i PID są ustawione odpowiednio na
04d8ifc73z kanałem „1”.
Wiele uruchomień, różne formaty
Aby wykonać kilka przebiegów z różnymi formatami, możesz użyć innego skryptu (ale wyniki nie zostaną przesłane do CtsVerifier.apk). Przykładowy skrypt testowy:
python tools/run_sensor_fusion_box.py device=FA7831A00278 camera=0 rotator=default img_size=640,360 fps=30 test_length=7Problemy z uprawnieniami
Aby rozwiązać problemy z uprawnieniami związanymi z sterowaniem silnikiem przez port USB:
- Dodaj nazwę użytkownika operatora do grupy
dialout, korzystając z:sudo adduser USERNAME dialout - Wyloguj operatora.
- Zaloguj się w operatorze.