
Questa pagina fornisce un elenco completo dei test della suite di test delle immagini della fotocamera (ITS), che fa parte di Android Compatibility Test Suite (CTS) Verifier. I test ITS sono test funzionali, il che significa che non misurano la qualità dell'immagine, ma che tutte le funzioni della videocamera pubblicizzate funzionano come previsto. Questo documento consente a sviluppatori e tester di comprendere cosa fanno i singoli test e come eseguire il debug degli errori di test.
In Android 17 e versioni successive, i test ITS della videocamera sono suddivisi
in due attività in CTS Verifier per consentire l'esecuzione parallela e ridurre
il tempo di test: un'attività per i test feature_combination e sensor_fusion
e un'altra per tutti gli altri test.
Test ITS della fotocamera in base alle proprietà della fotocamera richieste, al livello API e al livello della classe di prestazioni multimediali (MPC). Per il livello API, ITS utilizza
ro.product.first_api_level per controllare i test aggiunti a un livello API specifico che
testano le esperienze utente negative per le funzionalità nei livelli API inferiori. ITS
utilizza ro.vendor.api_level per controllare i test delle funzionalità aggiunte a un livello API specifico
che richiedono nuove funzionalità hardware. Se
ro.odm.build.media_performance_class è definito per un
dispositivo, ITS richiede l'esecuzione di test specifici a seconda del livello MPC.
I test sono raggruppati per scena nel seguente modo:
scene0: acquisisci metadati, jitter, giroscopio, vibrazionescene1: esposizione, sensibilità, compensazione del valore di esposizione (EV), YUV rispetto a JPEG e RAWscene2: rilevamento dei volti, test che richiedono scene a coloriscene3: miglioramento dei bordi, movimento dell'obiettivoscene4: proporzioni, ritaglio, campo visivoscene5: ombreggiatura dell'obiettivoscene6: Zoomscene7: sensore multicamerascene8: misurazione della regione di esposizione automatica (AE) e bilanciamento del bianco automatico (AWB)scene9: compressione JPEGscene_extensions: estensioni della videocamerascene_tele: commutazione del teleobiettivoscene_flash: Autoflash, frequenza fotogrammi minimascene_video: cali di framescene_gen2_chart: test che utilizzano il grafico cartaceo di seconda generazionescene_wide_gamut: profilo e gamma di colori ampisensor_fusion: offset di sincronizzazione di videocamera e giroscopiofeature_combination: combinazioni di funzionalitàscene_ip: parità di immagini tra l'app Fotocamera predefinita e l'app Fotocamera Jetpack (JCA)
Consulta le singole sezioni per una descrizione di ogni scena.
scene0
I test non richiedono informazioni specifiche sulla scena. Tuttavia, lo smartphone deve essere fermo per il test del giroscopio e della vibrazione.
test_jitter
Misura il jitter nei timestamp della videocamera.
API testate:
android.hardware.camera2.CaptureResult#SENSOR_TIMESTAMPandroid.hardware.camera2.CaptureRequest#CONTROL_AE_TARGET_FPS_RANGE
Superato:c'è un delta di almeno 30 ms tra i frame.
Nella figura seguente, nota il piccolo intervallo dell'asse Y. Il jitter è in realtà piccolo in questo grafico.
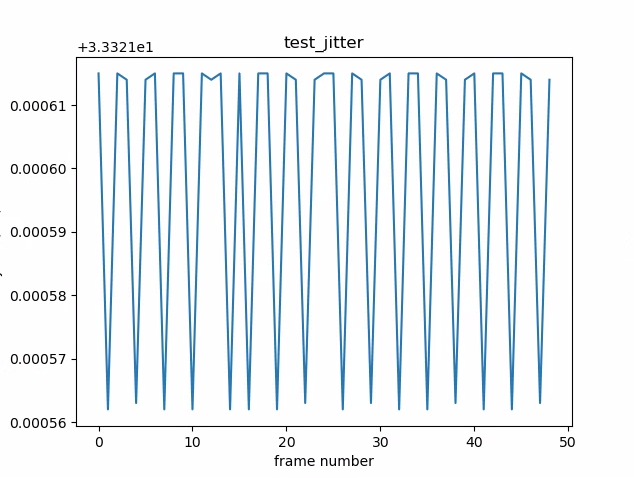
Figura 1. Grafico test_jitter.
test_metadata
Verifica la validità delle voci di metadati esaminando i risultati
dell'acquisizione e gli oggetti delle caratteristiche della videocamera. Questo test utilizza
valori di esposizione e guadagno auto_capture_request perché i contenuti dell'immagine non sono
importanti.
API testate:
android.hardware.camera2.CameraCharacteristics#INFO_SUPPORTED_HARDWARE_LEVELandroid.hardware.camera2.CameraCharacteristics#SCALER_CROPPING_TYPEandroid.hardware.camera2.CameraCharacteristics#SENSOR_BLACK_LEVEL_PATTERNandroid.hardware.camera2.CameraCharacteristics#SENSOR_INFO_TIMESTAMP_SOURCEandroid.hardware.camera2.CaptureRequest#SENSOR_FRAME_DURATIONandroid.hardware.camera2.CaptureResult#SENSOR_ROLLING_SHUTTER_SKEW
Superato:i tag a livello di hardware, rollingShutterSkew, frameDuration,
timestampSource, croppingType, blackLevelPattern, pixel_pitch,
il campo visivo (FoV) e la distanza iperfocale sono presenti e hanno valori validi.
test_request_capture_match
Test che verifica che il dispositivo scriva i valori di esposizione e guadagno corretti leggendo i metadati di acquisizione.
API testate:
android.hardware.camera2.CameraCharacteristics#SENSOR_INFO_EXPOSURE_TIME_RANGEandroid.hardware.camera2.CameraCharacteristics#SENSOR_INFO_SENSITIVITY_RANGEandroid.hardware.camera2.CaptureRequest#SENSOR_EXPOSURE_TIMEandroid.hardware.camera2.CaptureRequest#SENSOR_SENSITIVITYandroid.hardware.camera2.CaptureResult#SENSOR_EXPOSURE_TIMEandroid.hardware.camera2.CaptureResult#SENSOR_SENSITIVITY
Superato:i valori dei metadati richiesti e acquisiti corrispondono in tutte le inquadrature.
test_sensor_events
Per i dispositivi che pubblicizzano il supporto della fusione dei sensori, questo test verifica se il dispositivo esegue query e stampa gli eventi del sensore. I sensori previsti sono accelerometro, giroscopio e magnetometro. Questo test funziona solo se lo schermo è acceso, ovvero il dispositivo non è in modalità standby.
API testate:
Superato:vengono ricevuti gli eventi per ogni sensore.
test_solid_color_test_pattern
Test che verificano che i pattern di test a tinta unita vengano generati correttamente per la disattivazione della videocamera. Se la disattivazione della videocamera è supportata, devono essere supportati i pattern di test a tinta unita. Se la disattivazione dell'audio della videocamera non è supportata, i pattern di test a tinta unita vengono testati solo se la funzionalità è pubblicizzata.
Se le immagini non elaborate sono supportate, viene testata anche l'assegnazione dei colori. I colori testati sono nero, bianco, rosso, blu e verde. Per le videocamere che non supportano le immagini RAW, viene testato solo il nero.
API testate:
android.hardware.camera2.CameraCharacteristic#SENSOR_AVAILABLE_TEST_PATTERN_MODESandroid.hardware.camera2.CaptureResult#SENSOR_TEST_PATTERN_DATAandroid.hardware.camera2.CaptureResult#SENSOR_TEST_PATTERN_MODE
Superato:i pattern di test solidi supportati hanno il colore corretto e la varianza nell'immagine è bassa.
test_test_pattern
Esegue il test del parametro android.sensor.testPatternMode per acquisire i fotogrammi per ogni pattern di test valido e verifica che i fotogrammi vengano generati correttamente per i colori pieni e le barre dei colori. Questo test include i
seguenti passaggi:
- Acquisisce immagini per tutti i pattern di test supportati.
- Esegue un controllo di correttezza per la sequenza di test a tinta unita e le barre dei colori.
API testate:
android.hardware.camera2.CameraCharacteristic#SENSOR_AVAILABLE_TEST_PATTERN_MODESandroid.hardware.camera2.CaptureResult#SENSOR_TEST_PATTERN_MODE
Superato:i pattern di test supportati vengono generati correttamente.
Figura 2. Esempio di test_test_patterns.
test_tonemap_curve
Esegue il test della conversione del pattern di test da grezzo a YUV con mappatura tonale lineare. Questo test
richiede android.sensor.testPatternMode = 2 (COLOR_BARS) per generare
un pattern di immagine perfetto per la conversione della mappatura dei toni. Verifica che la pipeline abbia
output di colore corretti con mappatura tonale lineare e input immagine ideale (si basa su
test_test_patterns).
API testate:
android.hardware.camera2.CaptureRequest#DISTORTION_CORRECTION_MODEandroid.hardware.camera2.CaptureRequest#SENSOR_TEST_PATTERN_MODEandroid.hardware.camera2.CaptureRequest#TONEMAP_CURVEandroid.hardware.camera2.CaptureRequest#TONEMAP_MODE
Superato:i formati YUV e RAW sono simili tra loro.
Figura 3. Esempio non elaborato di test_tonemap_curve.
Figura 4. Esempio di test_tonemap_curve YUV.
test_unified_timestamp
Verifica se gli eventi del sensore di movimento e dell'immagine si trovano nello stesso dominio temporale.
API testate:
android.hardware.camera2.CaptureResult#SENSOR_TIMESTAMPandroid.hardware.Sensorandroid.hardware.SensorEventandroid.hardware.Sensor#TYPE_ACCELEROMETERandroid.hardware.Sensor#TYPE_GYROSCOPE
Passaggio:i timestamp del movimento si trovano tra i due timestamp delle immagini.
test_vibration_restriction
Verifica se la vibrazione del dispositivo funziona come previsto.
API testate:
android.hardware.Sensorandroid.hardware.SensorEventandroid.hardware.Sensor#TYPE_ACCELEROMETERandroid.os.Vibratorandroid.hardware.camera2.CameraDevice#setCameraAudioRestriction
Superato:il dispositivo non vibra quando l'audio della videocamera viene disattivato dall'API di limitazione dell'audio della videocamera.
scene1_1
scene1 è un grafico grigio. Il grafico grigio deve coprire il 30% centrale del campo visivo della videocamera. Il grafico grigio dovrebbe mettere alla prova moderatamente 3A (AE,
AWB e AF), poiché la regione centrale non ha funzionalità.
Tuttavia, la richiesta di acquisizione specifica l'intera scena, che include
funzionalità sufficienti per la convergenza 3A.
Le videocamere RFoV possono essere testate nel banco di prova WFoV o RFoV. Se una videocamera RFoV viene testata nel banco di prova WFoV, il grafico viene scalato di 2/3 per specificare alcuni limiti per il grafico grigio nel FoV per facilitare la convergenza 3A. Per descrizioni più dettagliate dei banchi di prova della videocamera, consulta ITS-in-a-box per videocamere.
Figura 5. Grafico della scena 1 a dimensioni reali (a sinistra), grafico ridimensionato a 2/3 (a destra).
test_ae_precapture_trigger
Esegue il test della macchina a stati AE quando si utilizza il trigger di preacquisizione. Acquisisce cinque richieste manuali con AE disattivata. L'ultima richiesta ha un trigger di acquisizione preliminare AE, che deve essere ignorato perché AE è disattivato.
API testate:
android.hardware.camera2.CaptureRequest#CONTROL_AE_MODEandroid.hardware.camera2.CaptureRequest#CONTROL_AE_PRECAPTURE_TRIGGERandroid.hardware.camera2.CaptureResult#CONTROL_AE_STATE
Passaggio:AE converge.
test_auto_vs_manual
I test che hanno acquisito scatti automatici e manuali hanno lo stesso aspetto.
API testate:
android.hardware.camera2.CaptureRequest#COLOR_CORRECTION_GAINSandroid.hardware.camera2.CaptureRequest#COLOR_CORRECTION_TRANSFORMandroid.hardware.camera2.CaptureResult#TONEMAP_CURVEandroid.hardware.camera2.CaptureResult#TONEMAP_MODE
Superato: i guadagni e la trasformazione del bilanciamento del bianco manuale riportati in ogni acquisizione
corrispondono al bilanciamento del bianco automatico estimate dell'algoritmo 3A della fotocamera.
Figura 6. Esempio di test_auto_vs_manual automatico.

Figura 7: esempio di bilanciamento del bianco test_auto_vs_manual.
Figura 8. Esempio di trasformazione del bilanciamento del bianco manuale test_auto_vs_manual.
test_black_white
Test che verifica che il dispositivo produca immagini in bianco e nero complete. Acquisisce due scatti: il primo con un guadagno estremamente basso e un'esposizione breve, che produce una foto nera, e il secondo con un guadagno estremamente elevato e un'esposizione lunga, che produce una foto bianca.
API testate:
android.hardware.camera2.CaptureRequest#SENSOR_EXPOSURE_TIMEandroid.hardware.camera2.CaptureRequest#SENSOR_SENSITIVITY
Pass: produce immagini in bianco e nero. I canali saturi delle immagini bianche hanno valori RGB di [255, 255, 255] con un margine di errore inferiore all'1% di differenza.
Figura 9. test_black_white, esempio di nero.

Figura 10. test_black_white, esempio bianco.
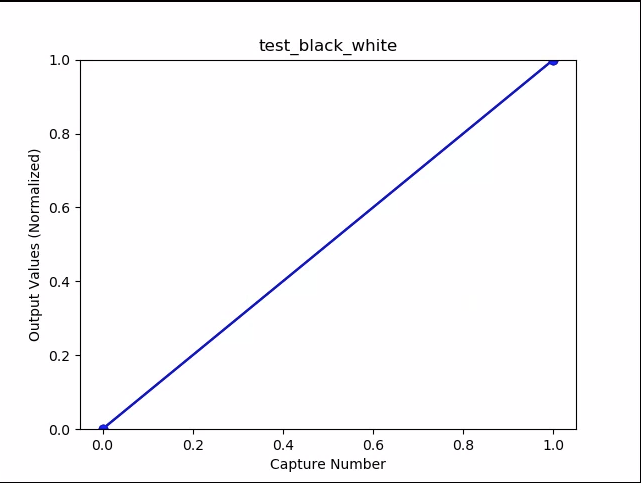
Figura 11. test_black_white, esempio di tracciato delle medie.
test_burst_capture
Verifica che l'intera pipeline di acquisizione possa tenere il passo con la velocità di acquisizione a grandezza naturale e con il tempo della CPU.
API testate:
Passaggio:acquisisce una sequenza di immagini a grandezza naturale, verifica la presenza di frame persi e la luminosità dell'immagine.
test_burst_sameness_manual
Scatta 5 raffiche di 50 immagini con l'impostazione di acquisizione manuale e verifica che siano tutte identiche. Utilizza questo test per identificare se ci sono frame sporadici che vengono elaborati in modo diverso o presentano artefatti.
API testate:
android.hardware.camera2.CameraMetadata#REQUEST_AVAILABLE_CAPABILITIES_MANUAL_SENSORandroid.hardware.camera2.CameraMetadata#SYNC_MAX_LATENCY_PER_FRAME_CONTROL
Superato:le immagini sono identiche visivamente e nei valori RGB.
Errore:mostra un picco o un calo del grafico della media RGB all'inizio di ogni raffica
- La tolleranza è del 3% per
first_API_level< 30 - La tolleranza è del 2% per
first_API_level>= 30

Figura 12. Esempio di media manuale di test_burst_sameness.
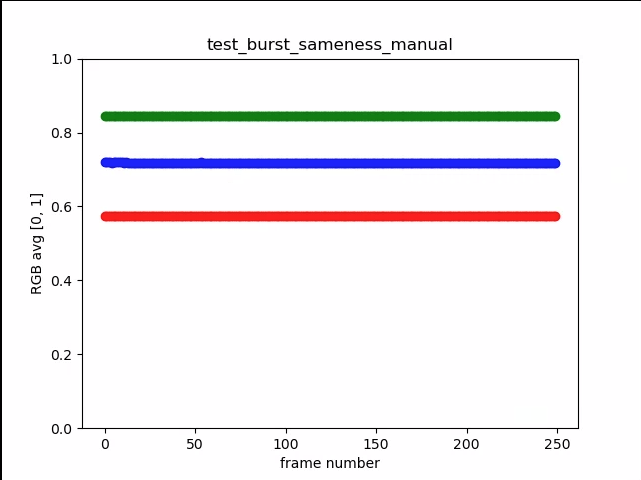
Figura 13. test_burst_sameness_manual_plot_means
test_crop_region_raw
Verifica che gli stream RAW non siano ritagliabili.
API testate:
android.hardware.camera2.CameraCharacteristics#SENSOR_INFO_ACTIVE_ARRAY_SIZEandroid.hardware.camera2.CaptureResult#SCALER_CROP_REGIONandroid.hardware.camera2.CaptureRequest#SCALER_CROP_REGION
Superato:le immagini YUV vengono ritagliate al centro, ma non le immagini RAW.

Figura 14. Esempio di ritaglio non elaborato di test_crop_region_raw.

Figura 15. test_crop_region_raw comp raw full example.

Figura 16. Esempio di ritaglio YUV grezzo di test_crop_region_raw.

Figura 17.Esempio completo di test_crop_region_raw YUV.
test_crop_regions
Testa che le regioni di ritaglio funzionino. Prende un'immagine completa e crea patch di cinque regioni diverse (angoli e centro). Acquisisce immagini con il ritaglio impostato per le cinque regioni. Confronta i valori dell'immagine patch e ritagliata.
API testate:
android.hardware.camera2.CameraCharacteristics#SENSOR_INFO_ACTIVE_ARRAY_SIZEandroid.hardware.camera2.CaptureRequest#SCALER_CROP_REGION
Superato:l'immagine della regione ritagliata corrisponde alla patch che corrisponde all'immagine ritagliata.
test_ev_compensation
Verifica che la compensazione del valore di esposizione (EV) sia applicata. Il test è composto da una sezione di base e una sezione avanzata.
La sezione di base verifica che la compensazione EV venga applicata utilizzando un intervallo
creato con CONTROL_AE_COMPENSATION_STEP. Vengono acquisiti otto fotogrammi per ogni
valore di compensazione.
La sezione avanzata aumenta l'esposizione in otto passaggi e controlla la luminosità misurata rispetto a quella prevista. I valori previsti vengono calcolati a partire dalla luminosità dell'immagine senza compensazione dell'esposizione applicata e il valore previsto si satura se i valori calcolati superano l'intervallo di valori dell'immagine effettiva. Il test non riesce se i valori previsti e i valori misurati non corrispondono o se le immagini sono sovraesposte entro cinque passaggi.
API testate:
android.hardware.camera2.CameraCharacteristics#CONTROL_AE_COMPENSATION_STEPandroid.hardware.camera2.CaptureRequest#CONTROL_AE_EXPOSURE_COMPENSATIONandroid.hardware.camera2.CaptureRequest#CONTROL_AE_LOCKandroid.hardware.camera2.CaptureResult#CONTROL_AE_STATEandroid.hardware.camera2.CaptureRequest#CONTROL_AWB_LOCKandroid.hardware.camera2.CaptureResult#TONEMAP_CURVEandroid.hardware.camera2.CaptureResult#TONEMAP_MODE
Passaggio di sezione di base:le immagini mostrano un'esposizione crescente senza sovraesposizione in cinque passaggi.
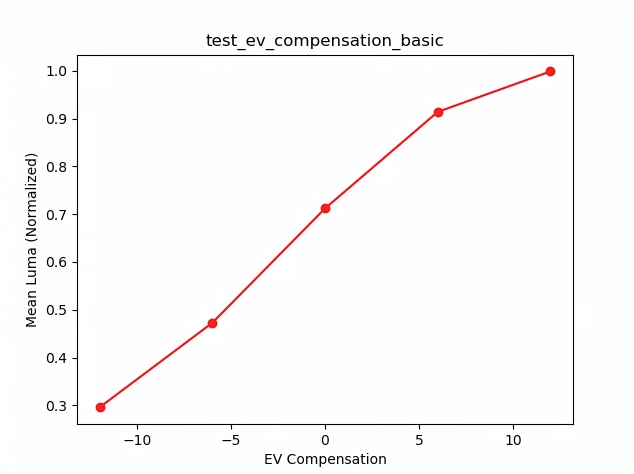
Figura 18. test_ev_compensation_basic.
Passaggio di sezione avanzato:acquisisce un aumento della luminanza all'aumentare dell'impostazione di compensazione dell'esposizione. Gli otto fotogrammi acquisiti per ogni impostazione di compensazione dell'esposizione hanno valori di luminanza stabili.
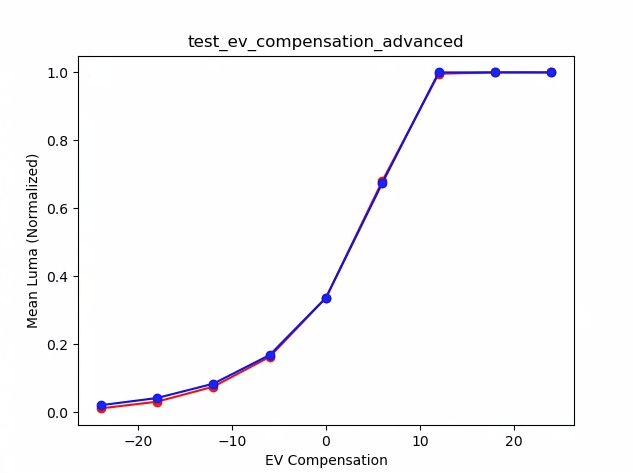
Figura 19. test_ev_compensation_advanced_plot_means.
test_exposure_x_iso
Test che dimostrano che si ottiene un'esposizione costante al variare di ISO e tempo di esposizione. Scatta
una serie di foto con ISO e tempo di esposizione scelti in modo che si bilancino a vicenda.
I risultati devono avere la stessa luminosità, ma nel corso della sequenza l'immagine
deve diventare più rumorosa. Verifica che i valori medi dei pixel campione siano vicini tra loro. Verifica
che le immagini non siano bloccate su 0 o 1 (il che le farebbe sembrare linee
piatte). Il test può essere eseguito anche con immagini RAW impostando il flag debug nel file di configurazione.
API testate:
android.hardware.camera2.CaptureRequest#SENSOR_EXPOSURE_TIMEandroid.hardware.camera2.CaptureRequest#SENSOR_SENSITIVITY
Superata:le immagini hanno la stessa luminosità, ma diventano più rumorose con ISO più elevati. I piani RGB sono piatti quando il valore di ISO*exposure è costante nello spazio di guadagno testato.
Meccanismo di errore: nella figura seguente, man mano che i valori del moltiplicatore di guadagno (asse x) aumentano, i valori medi del piano RGB normalizzato (asse y) iniziano a discostarsi dai valori del moltiplicatore di guadagno basso.
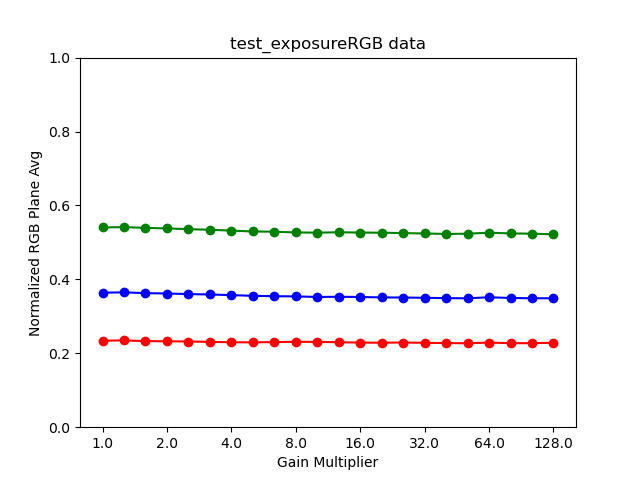
Figura 20. test_exposure_plot_means.

Figura 21. test_exposure_mult=1.00.

Figura 22. test_exposure_mult=64.00.
test_latching
Test che bloccano le impostazioni (esposizione e guadagno) sul frame destro per le videocamere FULL e
LEVEL_3. Scatta una serie di foto utilizzando richieste consecutive,
variando i parametri della richiesta di acquisizione tra uno scatto e l'altro. Verifica che le immagini
abbiano le proprietà previste.
API testate:
Superata:le immagini [2, 3, 6, 8, 10, 12, 13] hanno una sensibilità ISO o un'esposizione maggiori e mostrano valori RGB medi più elevati nel grafico della figura seguente.
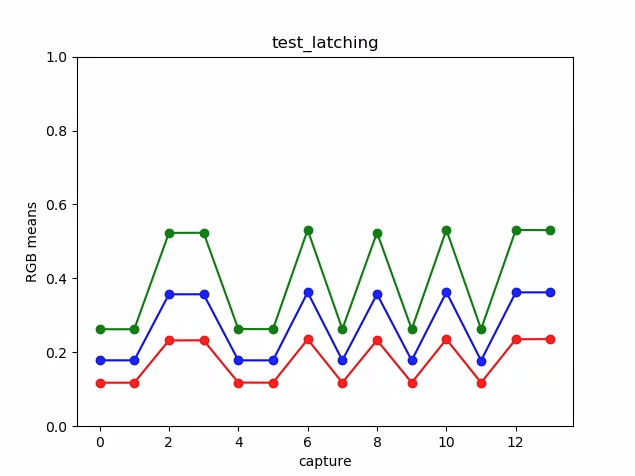
Figura 23.Esempio di grafico test_latching.

Figura 24. test_latching i=00.

Figura 25. test_latching i=01.

Figura 26. test_latching i=02.

Figura 27. test_latching i=03.
Figura 28. test_latching i=04.

Figura 29. test_latching i=05.

Figura 30. test_latching i=06.

Figura 31. test_latching i=07.

Figura 32. test_latching i=08.

Figura 33. test_latching i=09.

Figura 34. test_latching i=10.

Figura 35. test_latching i=11.

Figura 36. test_latching i=12.
test_linearity
Test in cui l'elaborazione del dispositivo può essere invertita in pixel lineari. Acquisisce una sequenza di scatti con il dispositivo puntato su un bersaglio uniforme.
API testate:
android.hardware.camera2.CameraCharacteristics#SENSOR_INFO_SENSITIVITY_RANGEandroid.hardware.camera2.CaptureRequest#BLACK_LEVEL_LOCKandroid.hardware.camera2.CaptureRequest#SENSOR_SENSITIVITYandroid.hardware.camera2.CaptureRequest#TONEMAP_CURVEandroid.hardware.camera2.CaptureRequest#TONEMAP_MODE
Superato:i valori R, G e B devono aumentare in modo lineare con l'aumento della sensibilità.
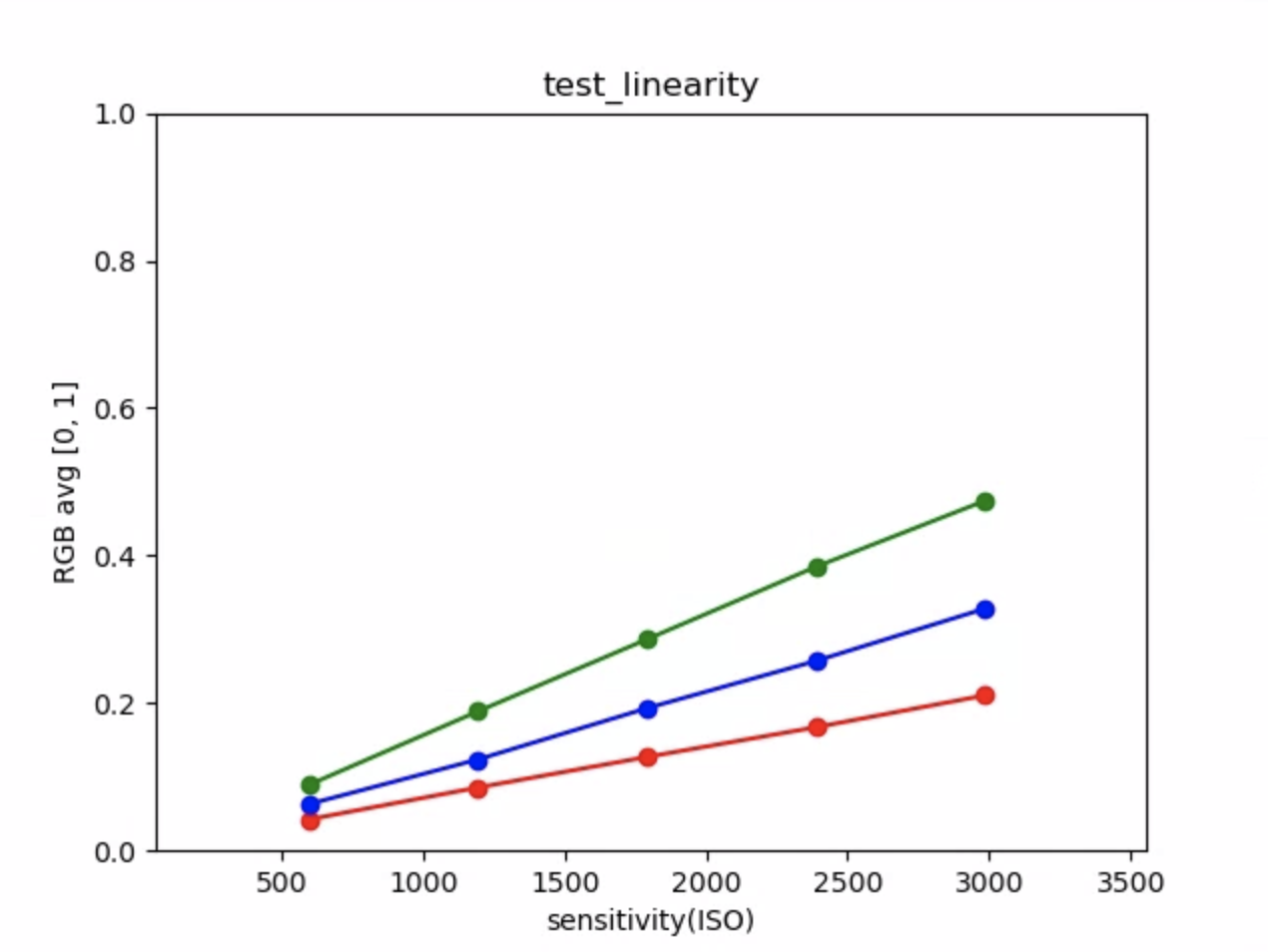
Figura 37.Esempio di grafico test_linearità.
test_locked_burst
Esegue il test del blocco 3A e della raffica YUV (utilizzando l'impostazione automatica). Questo test è progettato per essere superato
anche su dispositivi limitati che non dispongono di MANUAL_SENSOR o PER_FRAME_CONTROLS.
Il test controlla la coerenza dell'immagine YUV mentre il controllo della frequenza fotogrammi è in CTS.
API testate:
android.hardware.camera2.CaptureRequest#CONTROL_AE_LOCKandroid.hardware.camera2.CaptureRequest#CONTROL_AWB_LOCK
Superato:le acquisizioni sembrano coerenti.
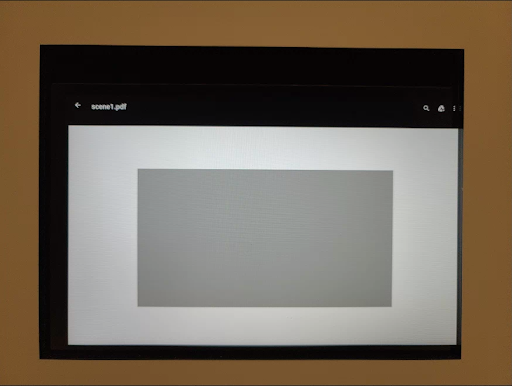
Figura 38. Esempio di test_locked_burst frame0.
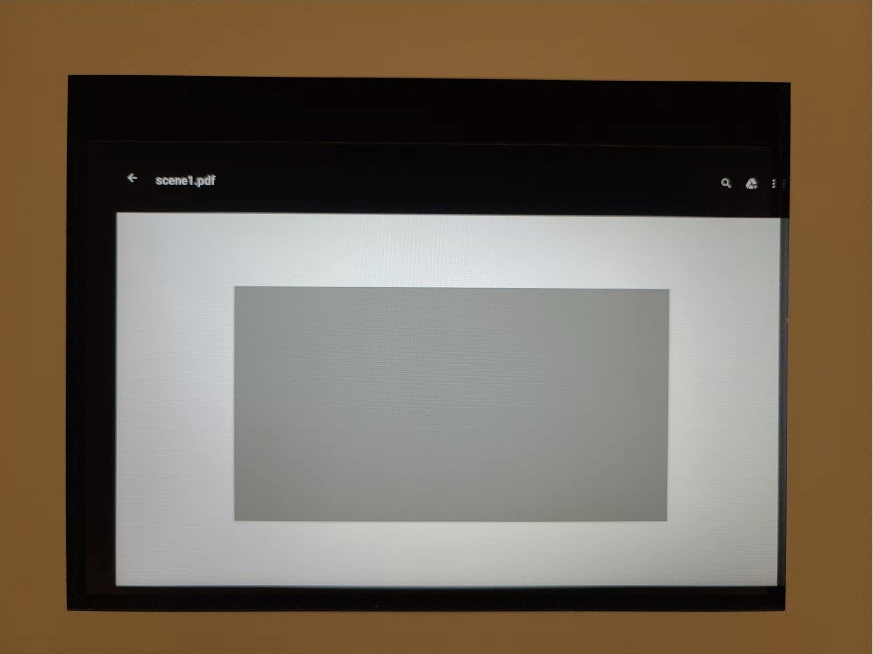
Figura 39. Esempio di frame1 di test_locked_burst.
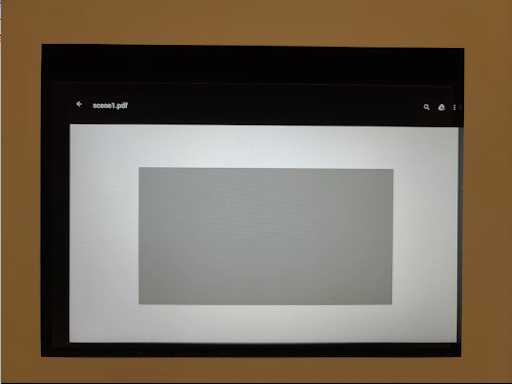
Figura 40. Esempio di frame2 di test_locked_burst.
scene1_2
scene 1_2 è una copia funzionalmente identica di scene 1_1, che implementa una
struttura di sottoscene per alleviare la durata estesa di scene 1.
test_param_color_correction
Verifica che i parametri android.colorCorrection.* vengano applicati quando vengono impostati.
Scatta foto con valori di trasformazione e guadagno diversi e verifica che abbiano un aspetto
corrispondentemente diverso. La trasformazione e i guadagni vengono scelti per rendere l'output
sempre più rosso o blu. Utilizza una mappatura dei toni lineare.
La mappatura tonale è una tecnica utilizzata nell'elaborazione delle immagini per mappare un insieme di colori a un altro per approssimare l'aspetto delle immagini ad alta gamma dinamica in un mezzo con una gamma dinamica più limitata.
API testate:
android.hardware.camera2.CaptureRequest#COLOR_CORRECTION_GAINSandroid.hardware.camera2.CaptureRequest#COLOR_CORRECTION_MODEandroid.hardware.camera2.CaptureRequest#COLOR_CORRECTION_TRANSFORM
Passaggio:i valori R e B vengono aumentati in base alla trasformazione.
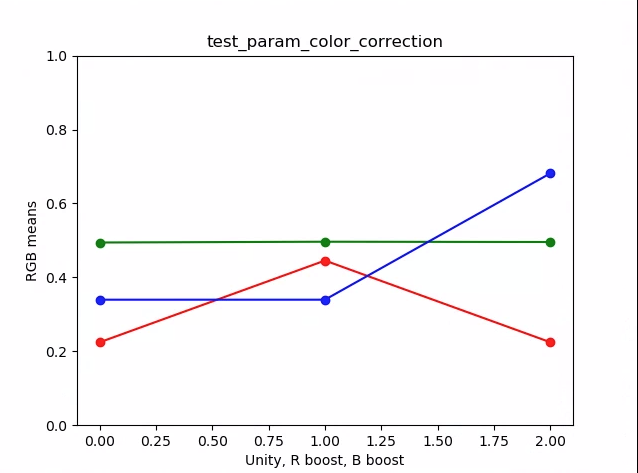
Figura 41. Esempio di media del grafico test_param_color_correction.
Nelle figure seguenti, l'asse x rappresenta le richieste di acquisizione: 0 = unità, 1 = potenziamento del rosso e 2 = potenziamento del blu.
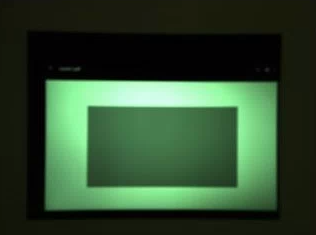
Figura 42. Esempio di test_param_color_correction req=0 unity.
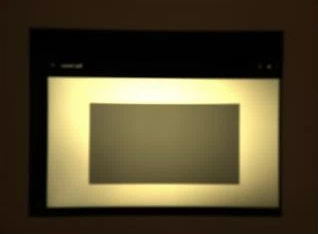
Figura 43. Esempio di test_param_color_correctness req=1 red boost.

Figura 44. Esempio di test_param_color_correction req=2 blue boost.
test_param_flash_mode
Verifica che il parametro android.flash.mode sia applicato. Imposta manualmente l'esposizione
sul lato scuro, in modo che sia ovvio se il flash è scattato
o meno, e utilizza una mappatura tonale lineare. Controlla il centro con l'immagine del riquadro per vedere
se è presente un gradiente ampio creato per verificare se il flash è stato attivato.
API testate:
Superata:il centro dell'immagine del riquadro presenta un gradiente ampio, il che significa che il flash è stato attivato.

Figura 45. Esempio di test_param_flash_mode 1.

Figura 46. Esempio di un riquadro test_param_flash_mode.
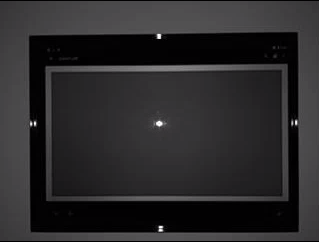
Figura 47. Esempio di test_param_flash_mode 2.

Figura 48. Esempio di due riquadri test_param_flash_mode.
test_param_noise_reduction
Verifica che il parametro android.noiseReduction.mode venga applicato correttamente
quando è impostato. Acquisisce immagini con la fotocamera poco illuminata. Utilizza un guadagno analogico elevato per
contribuire a garantire che l'immagine acquisita sia rumorosa. Acquisisce tre immagini per NR disattivato, veloce e di alta qualità. Acquisisce anche un'immagine con guadagno basso e NR disattivato e utilizza
la varianza di questa come base di riferimento. Maggiore è il rapporto segnale/rumore (SNR),
migliore è la qualità dell'immagine.
API testate:
Superato:il rapporto segnale/rumore varia in base alle diverse modalità di riduzione del rumore e si comporta in modo simile al seguente grafico:
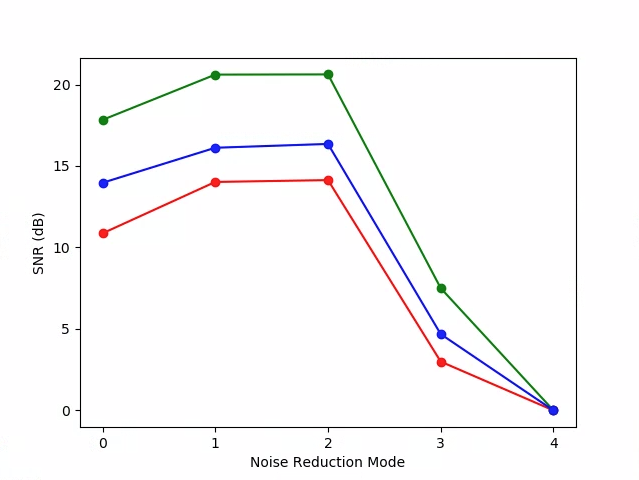
Figura 49. Grafico test_param_noise_reduction con esempio di SNR.
0: OFF, 1: FAST, 2: HQ, 3: MIN , 4: ZSL
Figura 50. Esempio di test_param_noise_reduction high gain nr=0.
Figura 51. Esempio di test_param_noise_reduction high gain nr=1.
Figura 52. Esempio di test_param_noise_reduction con nr=2 ad alto guadagno.
Figura 53. Esempio di test_param_noise_reduction high gain nr=3.

Figura 54. Esempio di test_param_noise_reduction con guadagno basso.
test_param_shading_mode
Verifica che il parametro android.shading.mode sia applicato.
API testate:
android.hardware.camera2.CaptureRequest#SHADING_MODEandroid.hardware.camera2.CaptureRequest#STATISTICS_LENS_SHADING_MAP_MODEandroid.hardware.camera2.CaptureResult#STATISTICS_LENS_SHADING_CORRECTION_MAP
Passaggio:le modalità di ombreggiatura vengono invertite e le mappe di ombreggiatura dell'obiettivo vengono modificate come previsto.
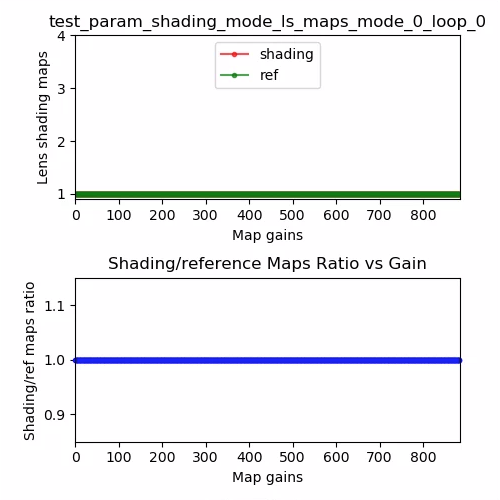
Figura 55: mappa di ombreggiatura dell'obiettivo test_param_shading_mode, esempio di ciclo 0 della modalità 0.
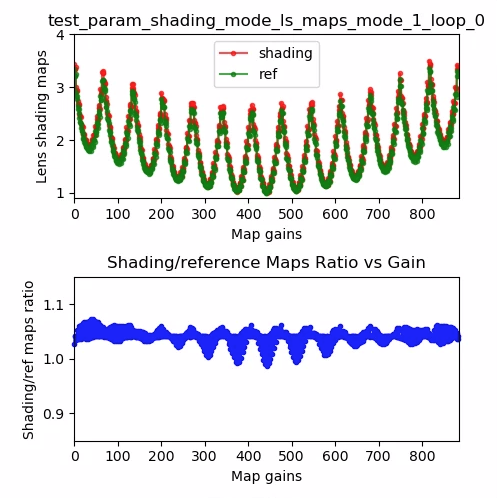
Figura 56: mappa di ombreggiatura dell'obiettivo test_param_shading_mode, esempio di ciclo 0 della modalità 1.
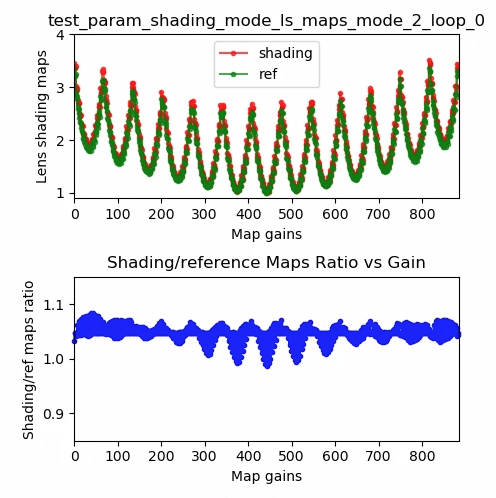
Figura 57: mappa di ombreggiatura dell'obiettivo test_param_shading_mode, esempio di ciclo 0 della modalità 2.
test_param_tonemap_mode
Verifica che il parametro android.tonemap.mode sia applicato. Applica curve di
mappatura dei toni diverse a ogni canale R, G, B e verifica che le immagini di output vengano
modificate come previsto. Questo test è composto da due test, test1 e test2.
API testate:
android.hardware.camera2.CameraMetadata#TONEMAP_MODE_CONTRAST_MODEandroid.hardware.camera2.CameraMetadata#TONEMAP_MODE_FASTandroid.hardware.camera2.CaptureRequest#TONEMAP_CURVEandroid.hardware.camera2.CaptureRequest#TONEMAP_MODE
Pass:
test1: Entrambe le immagini hanno una mappatura tonale lineare, man=1ha un gradiente più ripido. Il canale G (verde) è più luminoso per l'immaginen=1.test2: stessa mappatura dei toni, ma lunghezza diversa. Le immagini sono le stesse.

Figura 58. test_param_tonemap_mode con n=0.

Figura 59. test_param_tonemap_mode con n=1.
test_post_raw_sensitivity_boost
Controlla l'aumento della sensibilità grezza del post. Acquisisce un insieme di immagini raw e YUV con sensibilità diversa, pubblica la combinazione di aumento della sensibilità raw e verifica se la media dei pixel di output corrisponde alle impostazioni della richiesta.
API testate:
android.hardware.camera2.CameraCharacteristics#CONTROL_POST_RAW_SENSITIVITY_BOOST_RANGEandroid.hardware.camera2.CameraMetadata#REQUEST_AVAILABLE_CAPABILITIES_RAWandroid.hardware.camera2.CaptureRequest#CONTROL_POST_RAW_SENSITIVITY_BOOSTandroid.hardware.camera2.CaptureRequest#SENSOR_SENSITIVITY
Passaggio:le immagini non elaborate diventano più scure all'aumentare del boost, mentre la luminosità delle immagini YUV rimane costante.
Figura 60. test_post_raw_sensitivity_boost raw s=3583 boost=0100 example.
Figura 61. test_post_raw_sensitivity_boost raw s=1792 boost=0200 example.
Figura 62. Esempio di test_post_raw_sensitivity_boost raw s=0896 boost=0400.

Figura 63. Esempio di test_post_raw_sensitivity_boost raw s=0448 boost=0800.

Figura 64. Esempio di test_post_raw_sensitivity_boost raw s=0224 boost=1600.
Figura 65. Esempio di test_post_raw_sensitivity_boost raw s=0112 boost=3199.
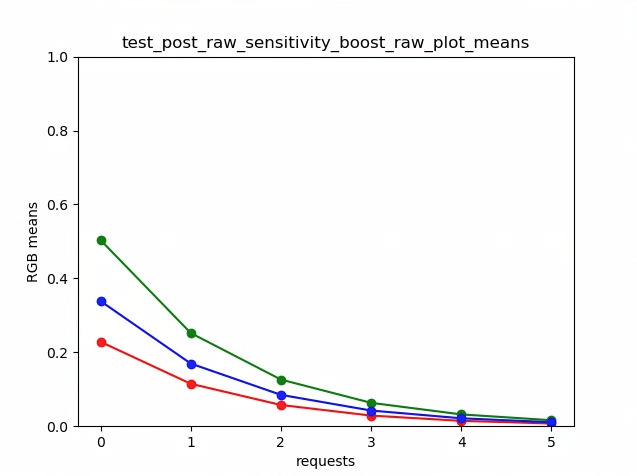
Il Figura 66. test_post_raw_sensitivity_boost raw plot significa esempio.

Figura 67. test_post_raw_sensitivity_boost YUV s=0112 boost=3199 example.

Figura 68. test_post_raw_sensitivity_boost YUV s=0448 boost=0800 example.

Figura 69. test_post_raw_sensitivity_boost YUV s=0896 boost=0400 example.
Figura 70. test_post_raw_sensitivity_boost YUV s=1792 boost=0200 example.

Figura 71. Esempio di test_post_raw_sensitivity_boost YUV s=3585 boost=0100.
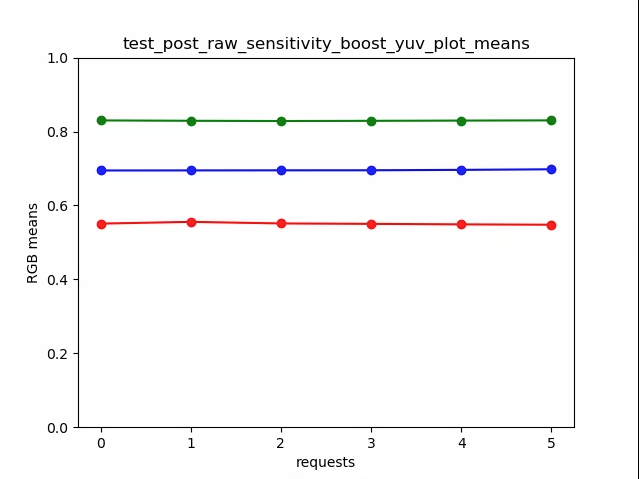
Figura 72. test_post_raw_sensitivity_boost_yuv_plot_means
test_raw_exposure
Acquisisce una serie di immagini non elaborate con tempi di esposizione crescenti e misura i valori dei pixel.
API testate:
android.hardware.camera2.CameraMetadata#REQUEST_AVAILABLE_CAPABILITIES_RAWandroid.hardware.camera2.CaptureRequest#SENSOR_EXPOSURE_TIME
Passa:l'aumento dell'ISO (guadagno) rende i pixel più sensibili alla luce, quindi il grafico si sposta verso sinistra.
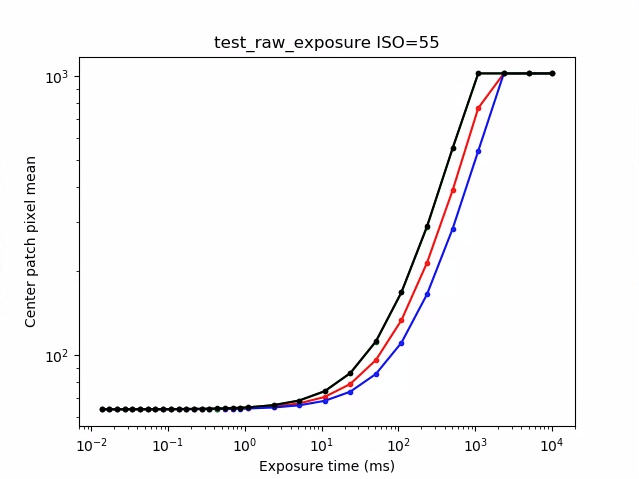
Figura 73. Esempio di test_raw_exposure ISO=55.
10⁰ è 1 ms, 10¹ è 10 ms e 10⁻¹ è 0, 1 ms.
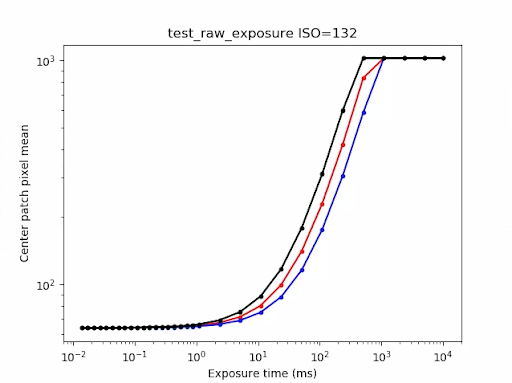
Figura 74. Esempio di test_raw_exposure ISO=132.
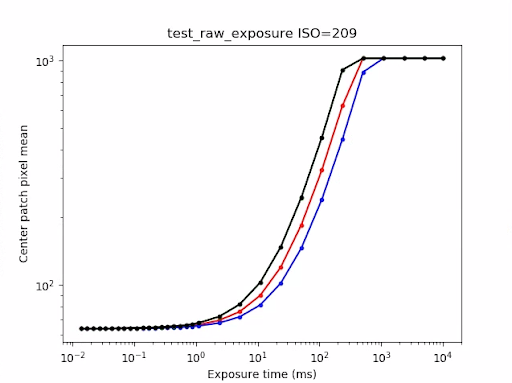
Figura 75. Esempio di test_raw_exposure ISO=209.
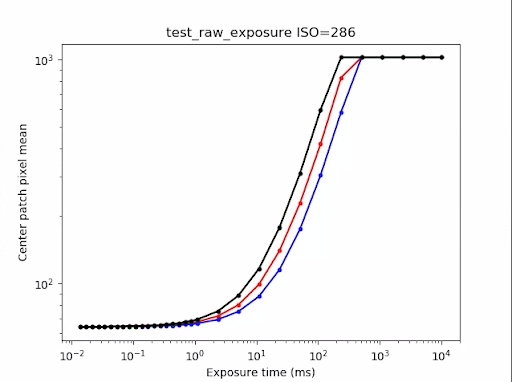
Figura 76. test_raw_exposure ISOs=286 example.
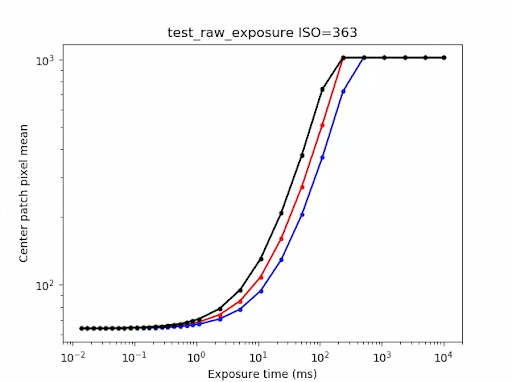
Figura 77. Esempio di test_raw_exposure ISO=363.
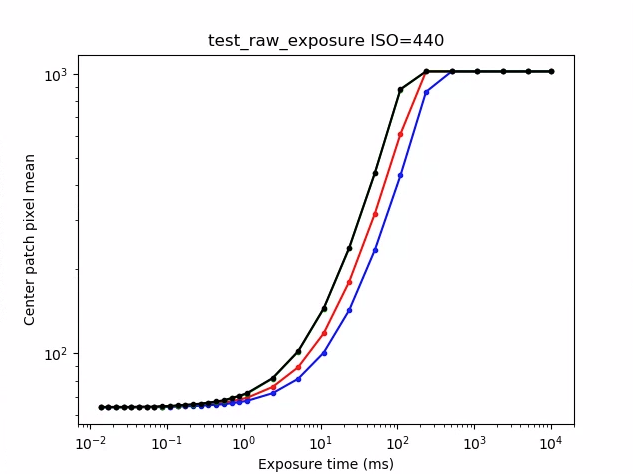
Figura 78. Esempio di test_raw_exposure ISO=440.
test_reprocess_noise_reduction
Test a cui viene applicato android.noiseReduction.mode per le richieste di rielaborazione.
Acquisisce immagini rielaborate con la fotocamera poco illuminata. Utilizza un guadagno analogico elevato
per verificare che l'immagine acquisita sia rumorosa. Acquisisce tre immagini rielaborate,
per NR disattivato, veloce e di alta qualità. Acquisisce un'immagine rielaborata con guadagno basso
e NR disattivato e utilizza la varianza di questa immagine come base di riferimento.
API testate:
Passaggio: FAST >= OFF, HQ >= FAST e HQ >> OFF.
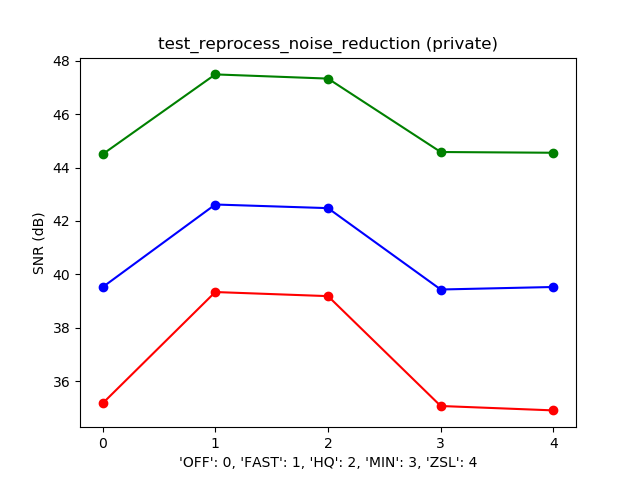
Figura 79. Esempio tipico di grafico SNR rispetto alla modalità NR.
test_tonemap_sequence
Esegue il test di una sequenza di scatti con diverse curve di mappatura dei toni. Acquisisce tre scatti manuali con una mappatura tonale lineare. Acquisisce tre scatti manuali con la mappatura della tonalità predefinita. Calcola il delta tra ogni coppia di frame consecutivi.
API testate:
Superato:ci sono tre fotogrammi identici seguiti da un diverso insieme di tre fotogrammi identici.
Figura 80. Esempio di test_tonemap_sequence i=0.
Figura 81. Esempio di test_tonemap_sequence i=1.
Figura 82. Esempio di test_tonemap_sequence i=2.

Figura 83. test_tonemap_sequence i=3 example.

Figura 84. test_tonemap_sequence i=4 example.

Figura 85. Esempio di test_tonemap_sequence i=5.
test_yuv_jpeg_all
Test che verificano il funzionamento di tutte le dimensioni e i formati segnalati per l'acquisizione di immagini. Utilizza una richiesta manuale con una mappatura dei toni lineare in modo che YUV e JPEG abbiano lo stesso aspetto quando vengono convertiti dal modulo image_processing_utils. Le immagini non vengono salvate per impostazione predefinita, ma possono essere salvate attivando debug_mode.
API testate:
android.hardware.camera2.CaptureRequest#TONEMAP_CURVEandroid.hardware.camera2.CaptureRequest#TONEMAP_MODEandroid.graphics.ImageFormat#JPEG
Superato: tutti i centri immagine hanno una differenza quadratica media (RMS) massima (valore di un segnale) nelle immagini RGB convertite con il 3% dell'immagine YUV a risoluzione più elevata.
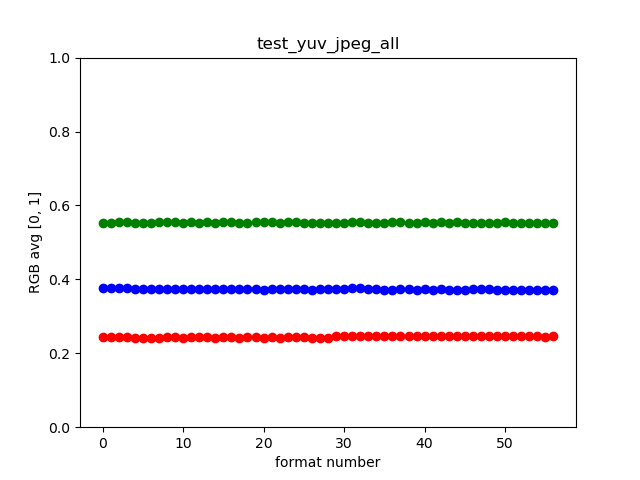
Figura 86. Esempio test_yuv_jpeg_all.
test_yuv_plus_dng
Test che verificano il funzionamento delle dimensioni e dei formati segnalati per l'acquisizione delle immagini.
API testate:
Superato:il test viene completato e restituisce le immagini richieste.
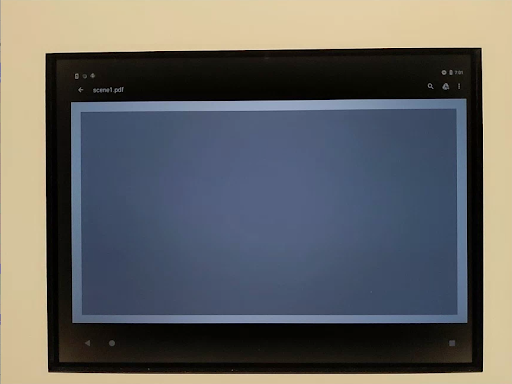
Figura 87. Esempio test_yuv_plus_dng.
scene1_3
scene 1_3 è una copia funzionalmente identica di scene 1_1, che implementa una
struttura di sottoscene per alleviare la durata estesa di scene 1.
test_capture_result
Test che restituiscono dati validi negli oggetti CaptureResult. Il test
consiste in uno scatto multiplo, un'acquisizione manuale e un secondo scatto multiplo.
API testate:
android.hardware.camera2.CaptureRequest#CONTROL_AE_MODEandroid.hardware.camera2.CaptureRequest#CONTROL_AE_REGIONSandroid.hardware.camera2.CaptureRequest#CONTROL_AF_MODEandroid.hardware.camera2.CaptureRequest#CONTROL_AF_REGIONSandroid.hardware.camera2.CaptureRequest#CONTROL_AWB_MODEandroid.hardware.camera2.CaptureRequest#CONTROL_AWB_REGIONSandroid.hardware.camera2.CaptureRequest#CONTROL_MODEandroid.hardware.camera2.CaptureRequest#COLOR_CORRECTION_GAINSandroid.hardware.camera2.CaptureRequest#COLOR_CORRECTION_TRANSFORMandroid.hardware.camera2.CaptureRequest#COLOR_CORRECTION_MODEandroid.hardware.camera2.CaptureRequest#SENSOR_EXPOSURE_TIMEandroid.hardware.camera2.CaptureRequest#SENSOR_SENSITIVITYandroid.hardware.camera2.CaptureResult#STATISTICS_LENS_SHADING_CORRECTION_MAPandroid.hardware.camera2.CaptureRequest#STATISTICS_LENS_SHADING_MAP_MODEandroid.hardware.camera2.CaptureRequest#TONEMAP_CURVEandroid.hardware.camera2.CaptureRequest#TONEMAP_MODE
Superato:i metadati sono validi per tutte le acquisizioni e le impostazioni manuali non vengono trasferite alla seconda scatto multiplo. Traccia la correzione dell'ombreggiatura dell'obiettivo per le acquisizioni.
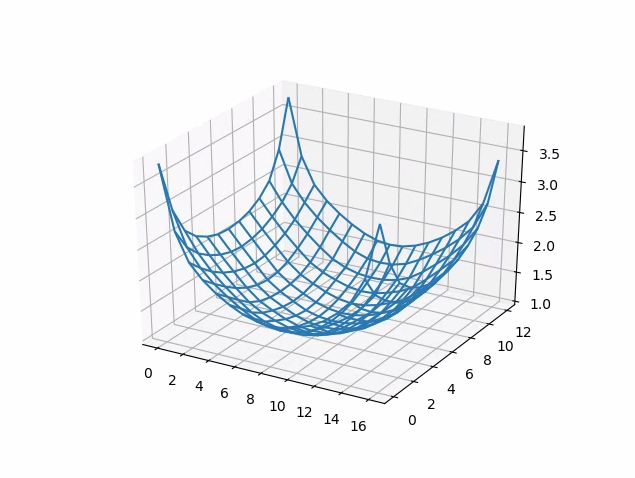
Figura 88. test_capture_result_plot_lsc_auto_ch0.
test_dng_noise_model
Verifica che i parametri del modello DNG raw siano corretti. Il grafico mostra la varianza misurata di una patch centrale della scheda grigia negli scatti non elaborati acquisiti in un intervallo di sensibilità e confronta questi valori con la varianza prevista a ogni sensibilità dal modello di rumore DNG nell'HAL della fotocamera (in base ai parametri O,S restituiti negli oggetti dei risultati di acquisizione). Per maggiori dettagli sul modello di rumore DNG, scarica il seguente documento sul modello di rumore DNG.
API testate:
android.hardware.camera2.CameraCharacteristics#SENSOR_INFO_SENSITIVITY_RANGEandroid.hardware.camera2.CameraCharacteristics#SENSOR_INFO_WHITE_LEVELandroid.hardware.camera2.CameraCharacteristics#SENSOR_MAX_ANALOG_SENSITIVITYandroid.hardware.camera2.CaptureResult#SENSOR_NOISE_PROFILEandroid.hardware.camera2.CaptureRequest#SENSOR_SENSITIVITY
Superato:i parametri del modello DNG raw sono corretti. I valori RGB previsti corrispondono a quelli effettivi misurati.
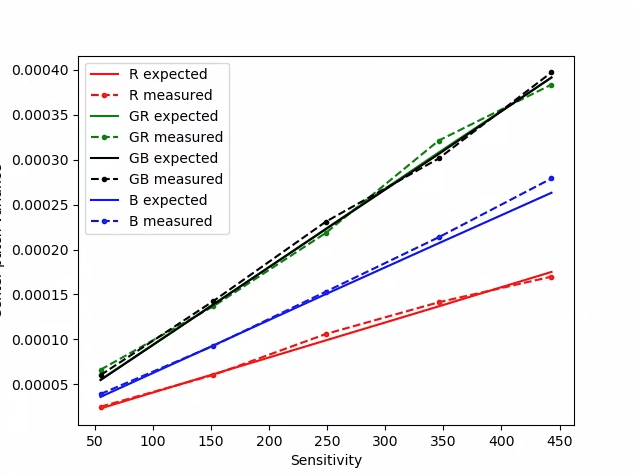
Figura 89. test_dng_noise_model_plog.
test_jpeg
I test che hanno convertito le immagini YUV e le immagini JPEG del dispositivo hanno lo stesso aspetto. Il test prende il 10% centrale dell'immagine, calcola il valore RGB e verifica che corrispondano.
API testate:
Superato:la differenza RGB media tra ogni immagine è inferiore al 3%.

Figura 90.test_jpeg_fmt=jpg.jpg.

Figura 91.test_jpeg=fmt=yuv.jpg.
test_raw_burst_sensitivity
Acquisisce una serie di immagini grezze con guadagni crescenti e misura il rumore. Acquisisce solo file RAW, in una raffica.
API testate:
android.hardware.camera2.CameraCharacteristics#SENSOR_INFO_ACTIVE_ARRAY_SIZEandroid.hardware.camera2.CameraCharacteristics#SENSOR_INFO_SENSITIVITY_RANGEandroid.hardware.camera2.CameraCharacteristics#SENSOR_INFO_WHITE_LEVELandroid.hardware.camera2.CameraCharacteristics#SENSOR_MAX_ANALOG_SENSITIVITYandroid.hardware.camera2.CameraMetadata#REQUEST_AVAILABLE_CAPABILITIES_RAW
Passaggio:ogni scatto è più rumoroso del precedente, poiché il guadagno aumenta.
Utilizza la varianza della cella della griglia delle statistiche del centro.
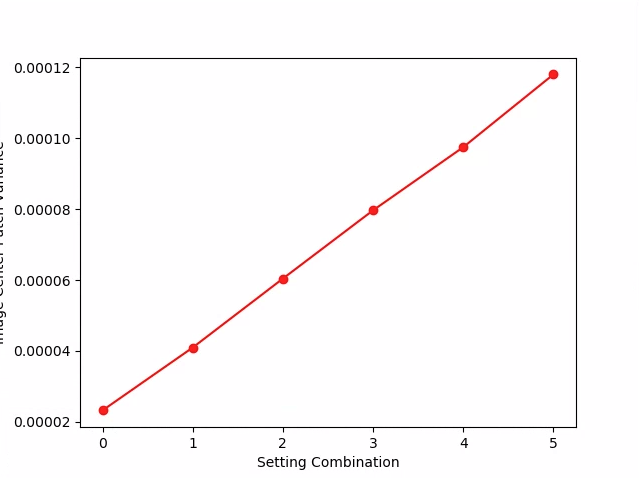
Figura 92. test_raw_burst_sensitivity_variance.
test_raw_sensitivity
Acquisisce una serie di immagini grezze con sensibilità crescenti e misura il rumore (varianza) nel 10% centrale dell'immagine. Test che dimostrano che ogni scatto è più rumoroso del precedente.
API testate:
android.hardware.camera2.CameraCharacteristics#SENSOR_INFO_PRE_CORRECTION_ACTIVE_ARRAY_SIZEandroid.hardware.camera2.CameraCharacteristics#SENSOR_INFO_SENSITIVITY_RANGEandroid.hardware.camera2.CameraCharacteristics#SENSOR_INFO_WHITE_LEVELandroid.hardware.camera2.CameraCharacteristics#SENSOR_MAX_ANALOG_SENSITIVITYandroid.hardware.camera2.CameraMetadata#REQUEST_AVAILABLE_CAPABILITIES_RAW
Passaggio:la varianza aumenta a ogni tiro.
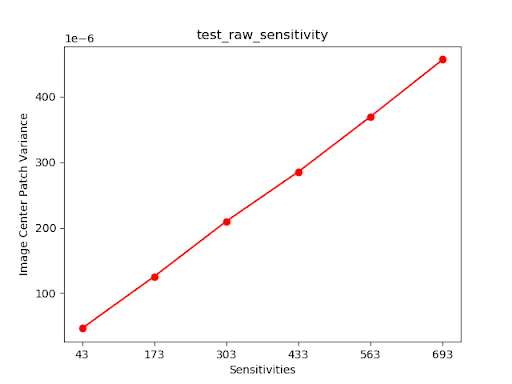
Figura 93. test_raw_sensitivity_variance.
test_yuv_plus_jpeg
Test che acquisisce un singolo frame come output YUV e JPEG. Utilizza una richiesta manuale con una mappatura dei toni lineare in modo che YUV e JPEG abbiano lo stesso aspetto quando vengono convertiti dal modulo image_processing_utils.
API testate:
android.hardware.camera2.CaptureRequest#TONEMAP_CURVEandroid.hardware.camera2.CaptureRequest#TONEMAP_MODEandroid.graphics.ImageFormat#JPEG
Superato:le immagini YUV e JPEG sono simili e hanno una differenza RMS (valore di un segnale) inferiore all'1%.

Figura 94. test_yuv_plus_jpeg con formato JPEG.

Figura 95. test_yuv_plus_jpeg con formato YUV.
test_yuv_plus_raw
Test che acquisiscono un singolo frame come output sia raw (raw a 10 bit e 12 bit) sia YUV, se supportati. Utilizza una richiesta manuale con mappatura tonale lineare, quindi i valori raw e
YUV dovrebbero essere uguali. Confronta i valori RGB centrali del 10% delle immagini convertite in RGB. Logandroid.shading.mode.
API testate:
android.hardware.camera2.CameraMetadata#REQUEST_AVAILABLE_CAPABILITIES_RAWandroid.hardware.camera2.CaptureResult#STATISTICS_LENS_SHADING_CORRECTION_MAPandroid.hardware.camera2.CaptureRequest#COLOR_CORRECTION_MODEandroid.hardware.camera2.CaptureRequest#COLOR_CORRECTION_GAINSandroid.hardware.camera2.CaptureRequest#COLOR_CORRECTION_TRANSFORMandroid.hardware.camera2.CaptureRequest#CONTROL_AWB_MODEandroid.hardware.camera2.CaptureRequest#CONTROL_MODEandroid.hardware.camera2.CaptureRequest#SHADING_MODEandroid.hardware.camera2.CaptureRequest#TONEMAP_CURVEandroid.hardware.camera2.CaptureRequest#TONEMAP_MODEandroid.hardware.graphics.ImageFormat#RAW10android.hardware.graphics.ImageFormat#RAW12
Superato:le immagini YUV e non elaborate sono simili e presentano una differenza RMS (valore quadratico medio di un segnale) inferiore al 3,5%.

Figura 96. test_yuv_plus_raw_shading=1_raw.jpg.
Figura 97. test_yuv_plus_raw_shading=1_yuv.jpg.
test_sensitivity_priority
Test CONTROL_AE_PRIORITY_MODE_SENSOR_SENSITIVITY_PRIORITY
con varie impostazioni ISO per confermare una correlazione tra ISO più elevata e
livelli di rumore maggiori.
API testate:
android.hardware.camera2.CameraMetadata#CONTROL_AE_PRIORITY_MODE_SENSOR_SENSITIVITY_PRIORITYandroid.hardware.camera2.CaptureRequest#SENSOR_SENSITIVITYandroid.hardware.camera2.CaptureResult#SENSOR_SENSITIVITYandroid.hardware.camera2.CaptureRequest#CONTROL_AE_PRIORITY_MODEandroid.hardware.camera2.CaptureResult#CONTROL_AE_PRIORITY_MODEandroid.hardware.camera2.CameraCharacteristics#SENSOR_INFO_SENSITIVITY_RANGEandroid.hardware.camera2.CaptureRequest#CONTROL_AE_MODEandroid.hardware.camera2.CaptureResult#CONTROL_AE_MODEandroid.hardware.camera2.CameraMetadata#CONTROL_AE_MODE_ONandroid.hardware.camera2.CameraCharacteristics#CONTROL_AE_AVAILABLE_PRIORITY_MODES
Superato:un ISO più elevato comporta un aumento dei livelli di rumore.
Criteri di ignoramento dei test
Il test test_sensitivity_priority.py viene ignorato se viene soddisfatto uno dei seguenti
criteri:
- Il dispositivo ha un primo livello API (
first_api_level) pari o inferiore a 35. - Il dispositivo non fa pubblicità
CONTROL_AE_PRIORITY_MODE_SENSOR_SENSITIVITY_PRIORITYinCONTROL_AE_AVAILABLE_PRIORITY_MODES.
test_exposure_time_priority
Test CONTROL_AE_PRIORITY_MODE_SENSOR_EXPOSURE_TIME_PRIORITY
con vari tempi di esposizione, verificando la luminosità stabile nell'intervallo
in cui la sensibilità ISO può compensare.
API testate:
android.hardware.camera2.CameraMetadata#CONTROL_AE_PRIORITY_MODE_SENSOR_EXPOSURE_TIME_PRIORITYandroid.hardware.camera2.CaptureRequest#SENSOR_EXPOSURE_TIMEandroid.hardware.camera2.CaptureResult#SENSOR_EXPOSURE_TIMEandroid.hardware.camera2.CaptureRequest#CONTROL_AE_PRIORITY_MODEandroid.hardware.camera2.CaptureResult#CONTROL_AE_PRIORITY_MODEandroid.hardware.camera2.CameraCharacteristics#SENSOR_INFO_SENSITIVITY_RANGEandroid.hardware.camera2.CaptureResult#SENSOR_SENSITIVITYandroid.hardware.camera2.CaptureRequest#CONTROL_AE_MODEandroid.hardware.camera2.CaptureResult#CONTROL_AE_MODEandroid.hardware.camera2.CameraMetadata#CONTROL_AE_MODE_ONandroid.hardware.camera2.CameraCharacteristics#CONTROL_AE_AVAILABLE_PRIORITY_MODES
Superato:la luminosità è stabile (entro la tolleranza) per tutti i tempi di esposizione se l'ISO rientra nel suo intervallo di compensazione.
Criteri di ignoramento dei test
Il test test_exposure_time_priority viene ignorato se viene soddisfatto uno dei seguenti
criteri:
- Il dispositivo ha un primo livello API (
first_api_level) pari o inferiore a 35. - Il dispositivo non fa pubblicità
CONTROL_AE_PRIORITY_MODE_SENSOR_EXPOSURE_TIME_PRIORITYinCONTROL_AE_AVAILABLE_PRIORITY_MODES.
scene2_a
scene2_a ha tre volti con sfondo grigio e abiti neutri. I
volti sono scelti in modo da avere un'ampia gamma di tonalità della pelle. Per un funzionamento ottimale del rilevamento dei volti, il grafico deve avere l'orientamento corretto.

Figura 98. Esempio di scene2_a.
test_autoframing
Esegue il test del comportamento di inquadratura automatica del dispositivo videocamera. Esegue uno zoom elevato in modo che
nessun volto nella scena sia visibile, attiva la modalità di inquadratura automatica
impostando AUTOFRAMING in CaptureRequest su True e verifica se tutti
i volti nella scena originale possono essere rilevati quando lo stato converge (ovvero
quando AUTOFRAMING_STATE in CaptureResult è impostato su
AUTOFRAMING_STATE_CONVERGED).
API testate:
android.hardware.camera2.CameraCharacteristics#CONTROL_AUTOFRAMING_AVAILABLEandroid.hardware.camera2.CaptureRequest#CONTROL_AUTOFRAMINGandroid.hardware.camera2.CaptureResult#CONTROL_AUTOFRAMINGandroid.hardware.camera2.CaptureResult#CONTROL_AUTOFRAMING_STATE
Superato:tutti e tre i volti vengono rilevati.
test_display_p3
Test
Display P3
Acquisizione in formato JPEG utilizzando l'API ColorSpaceProfiles. Verifica che il
JPEG acquisito abbia un
profilo ICC
appropriato nell'intestazione e che l'immagine contenga colori al di fuori della gamma sRGB.
API testate:
android.hardware.camera2.params.ColorSpaceProfilesandroid.hardware.camera2.params.SessionConfiguration#setColorSpace
Superato:il JPEG contiene un profilo ICC Display P3 e colori al di fuori della gamma sRGB.
test_effects
Acquisisce il frame per gli effetti della fotocamera supportati e controlla se vengono generati
correttamente. Il test controlla solo gli effetti OFF e MONO, ma salva le immagini per
tutti gli effetti supportati.
API testate:
android.hardware.camera2.CameraCharacteristics#CONTROL_AVAILABLE_EFFECTSandroid.hardware.camera2.CaptureRequest#CONTROL_EFFECT_MODE
Passaggio: acquisisce l'immagine della scena con effetti OFF e un'immagine monocromatica
con gli effetti impostati su MONO.
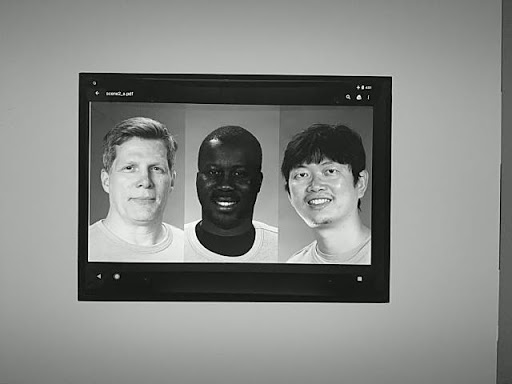
Figura 99. test_effects_MONO.
test_exposure_keys_consistent
Questo test confronta la luminanza media di un'acquisizione con AE abilitata con un'acquisizione con AE disabilitata che applica manualmente i parametri di esposizione (sensibilità, tempo di esposizione, durata del frame, aumento della sensibilità post-raw) ricevuti nel CaptureResult dell'acquisizione con AE abilitata.
API testate:
android.hardware.camera2.CaptureRequest#SENSOR_SENSITIVITYandroid.hardware.camera2.CaptureRequest#SENSOR_EXPOSURE_TIMEandroid.hardware.camera2.CaptureRequest#SENSOR_FRAME_DURATIONandroid.hardware.camera2.CaptureRequest#CONTROL_POST_RAW_SENSITIVITY_BOOSTandroid.hardware.camera2.CaptureResult#SENSOR_SENSITIVITYandroid.hardware.camera2.CaptureResult#SENSOR_EXPOSURE_TIMEandroid.hardware.camera2.CaptureResult#SENSOR_FRAME_DURATIONandroid.hardware.camera2.CaptureResult#CONTROL_POST_RAW_SENSITIVITY_BOOST
Superato:la differenza relativa di luminanza tra le due acquisizioni è inferiore al 4%.
test_format_combos
Testa diverse combinazioni di formati di output.
API testate:
android.hardware.camera2.CameraCharacteristics#SCALER_STREAM_CONFIGURATION_MAPandroid.hardware.camera2.params.StreamConfigurationMap#getOutputSizes()android.hardware.camera2.CameraCaptureSession#captureBurst()
Superata:tutte le combinazioni sono state acquisite correttamente.
test_num_faces
Esegue il test del rilevamento facciale.
API testate:
android.hardware.camera2.CaptureResult#STATISTICS_FACESandroid.hardware.camera2.CaptureResult#STATISTICS_FACE_DETECT_MODE
Passaggio:trova tre volti.
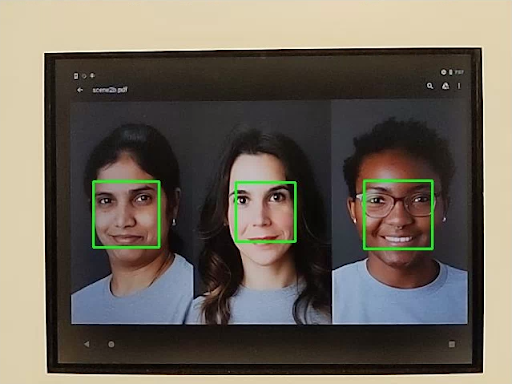
Figura 100. Esempio di modalità di rilevamento dei volti test_num_faces 1.
test_reprocess_uv_swap
Test che dimostrano che il rielaborazione YUV non scambia i piani U e V. Questo viene rilevato calcolando la somma delle differenze assolute (SAD) tra l'immagine riprocessata e un'acquisizione non riprocessata. Se lo scambio dei piani U e V dell'output della rielaborazione comporta un aumento della SAD, si presume che l'output abbia i piani U e V corretti.
API testate:
android.hardware.camera2.CameraDevice#createCaptureSessionandroid.hardware.camera2.CameraMetadata#REQUEST_AVAILABLE_CAPABILITIES_YUV_REPROCESSINGandroid.hardware.camera2.CaptureRequest#EDGE_MODEandroid.hardware.camera2.CaptureResult#NOISE_REDUCTION_MODE
Pass:i piani U e V non vengono scambiati.
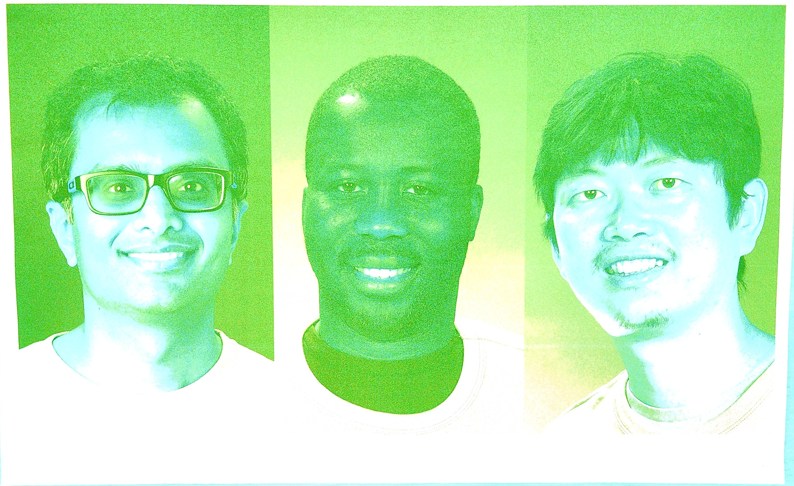
Figura 101. Esempio di test_reprocess_uv_swap.
scene2_b
scene2_b ha tre volti con sfondo grigio e abiti neutri. I
volti sono scelti in modo da avere un'ampia gamma di tonalità della pelle. Per un funzionamento ottimale del rilevamento dei volti, il grafico deve avere l'orientamento corretto.
test_preview_num_faces
Testa il rilevamento dei volti in anteprima con una maggiore diversità di tonalità della pelle nelle scene con volti.
API testate:
android.hardware.camera2.CaptureResult#STATISTICS_FACESandroid.hardware.camera2.CaptureResult#STATISTICS_FACE_DETECT_MODE
Passaggio:trova tre volti con punti di riferimento del viso nei riquadri di selezione del viso.
Figura 102. Esempio della modalità di rilevamento dei volti test_num_faces 1.
test_yuv_jpeg_capture_sameness
Acquisisce due immagini utilizzando i formati YUV e JPEG comuni più grandi con le stesse
proporzioni del formato JPEG più grande che non superi una risoluzione di 1920x1440.
Imposta jpeg.quality su 100 e acquisisce una richiesta a doppia superficie. Converte entrambe
le immagini in array RGB e calcola la differenza quadratica media (RMS) 3D
tra le due immagini.
Inoltre, questo test verifica che gli output YUV per tutti i casi d'uso di streaming supportati siano ragionevolmente simili all'YUV con il caso d'uso STILL_CAPTURE.
API testate:
android.hardware.camera2.CameraCharacteristics#SCALER_AVAILABLE_STREAM_USE_CASESandroid.hardware.camera2.CaptureRequest#JPEG_QUALITYandroid.graphics.ImageFormat#JPEG
Superato:le immagini YUV e JPEG per il caso d'uso STILL_CAPTURE hanno una differenza RMS (valore quadratico medio di un segnale) inferiore al 3%; le immagini YUV per tutti i casi d'uso supportati hanno una differenza CIELAB inferiore al 4% rispetto alle immagini YUV con il caso d'uso STILL_CAPTURE.
scene2_c
test_num_faces
Testa il rilevamento dei volti con una maggiore diversità di tonalità della pelle nelle scene con volti.
API testate:
android.hardware.camera2.CaptureResult#STATISTICS_FACESandroid.hardware.camera2.CaptureResult#STATISTICS_FACE_DETECT_MODE
Passaggio:trova tre volti.
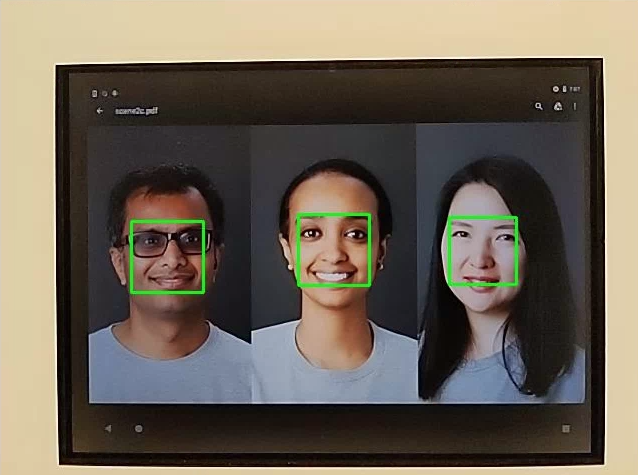
Figura 103. Esempio di modalità di rilevamento dei volti test_num_faces.
test_jpeg_capture_perf_class
Esegue il test della latenza di acquisizione JPEG per la classe di prestazioni S come specificato nella sezione 2.2.7.2 Fotocamera nel CDD.
Superato:DEVE avere una latenza di acquisizione JPEG camera2 < 1000 ms per una risoluzione di 1080p misurata dal test delle prestazioni della videocamera CTS in condizioni di illuminazione ITS (3000 K) per entrambe le videocamere principali.
test_camera_launch_perf_class
Esegue il test della latenza di avvio della videocamera per la classe di prestazioni S come specificato nella sezione 2.2.7.2 Videocamera della CDD.
Superato:DEVE avere una latenza di avvio di camera2 (apertura della videocamera al primo frame di anteprima) < 600 ms misurata dal test delle prestazioni della videocamera CTS in condizioni di illuminazione ITS (3000 K) per entrambe le fotocamere principali.
test_default_camera_hdr
Testa che l'acquisizione predefinita della fotocamera sia Ultra HDR per la classe di prestazioni 15 come specificato nella sezione 2.2.7.2 Fotocamera del CDD.
Superato:l'acquisizione del pacchetto della videocamera predefinito DEVE essere Ultra HDR per un dispositivo di classe di prestazioni 15.
scene2_d
test_preview_num_faces
Testa il rilevamento dei volti in anteprima con una maggiore diversità di tonalità della pelle nelle scene con volti.
API testate:
android.hardware.camera2.CaptureResult#STATISTICS_FACESandroid.hardware.camera2.CaptureResult#STATISTICS_FACE_DETECT_MODE
Passaggio:trova tre volti con punti di riferimento del viso nei riquadri di selezione del viso.
scene2_e
test_continuous_picture
50 frame con risoluzione VGA vengono acquisiti con la prima impostazione della richiesta di acquisizione
android.control.afMode = 4 (CONTINUOUS_PICTURE).
API testate:
android.hardware.camera2.CaptureRequest#CONTROL_AF_MODEandroid.hardware.camera2.CaptureResult#CONTROL_AE_STATEandroid.hardware.camera2.CaptureResult#CONTROL_AF_STATEandroid.hardware.camera2.CaptureResult#CONTROL_AWB_STATE
Superato:il sistema 3A si stabilizza entro la fine di un'acquisizione di 50 fotogrammi.
test_num_faces
Testa il rilevamento dei volti con una maggiore diversità di tonalità della pelle nelle scene con volti.
API testate:
android.hardware.camera2.CaptureResult#STATISTICS_FACESandroid.hardware.camera2.CaptureResult#STATISTICS_FACE_DETECT_MODE
Pass: trova 3 volti.
scene2_f
scene2_f ha tre volti con sfondo bianco e abiti bianchi. I volti
hanno un'ampia gamma di tonalità della pelle e un contrasto elevato con lo sfondo.

Figura 104. Esempio di scene2_f.
test_preview_num_faces
Testa il rilevamento dei volti con una maggiore diversità di tonalità della pelle nelle scene con volti.
API testate:
android.hardware.camera2.CaptureResult#STATISTICS_FACESandroid.hardware.camera2.CaptureResult#STATISTICS_FACE_DETECT_MODE
Passaggio:trova tre volti con punti di riferimento del viso nei riquadri di selezione del viso.
Figura 105. Esempio di test_num_faces_fd_mode_1.
scene2_g
scene2_g ha tre profili con sfondo bianco e abiti bianchi.
I volti hanno un'ampia gamma di tonalità della pelle e un contrasto elevato con lo sfondo.

Figura 106. Esempio scene2_g.
test_preview_num_faces
Testa il rilevamento dei volti con una maggiore diversità di tonalità della pelle nelle scene con volti.
API testate:
android.hardware.camera2.CaptureResult#STATISTICS_FACESandroid.hardware.camera2.CaptureResult#STATISTICS_FACE_DETECT_MODE
Passaggio:trova tre volti con punti di riferimento del viso nei riquadri di selezione del viso.
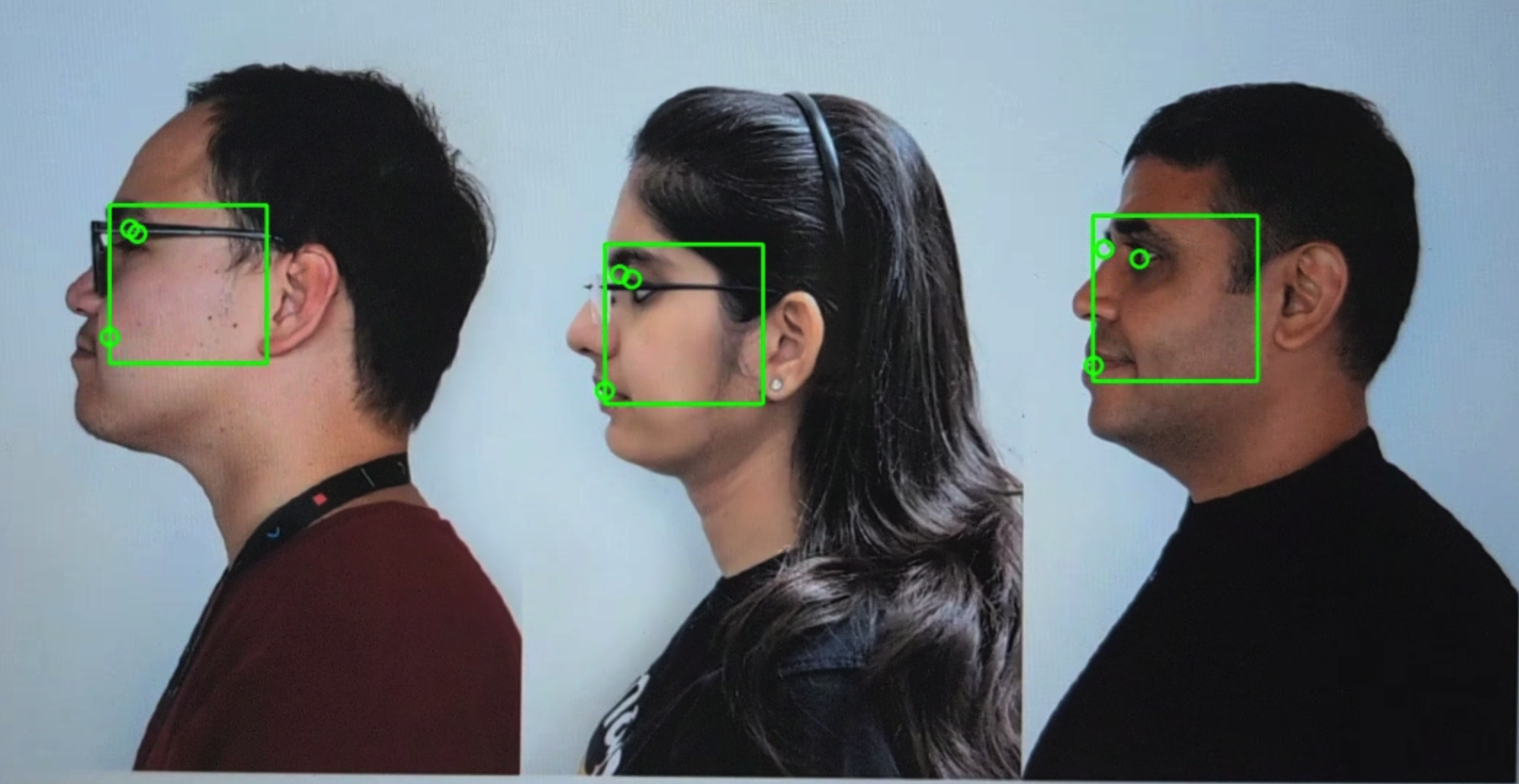
Figura 107. Esempio di test_preview_num_faces.
scena3
scene3 utilizza il grafico ISO12233 e la maggior parte dei test utilizza un metodo di estrazione del grafico per
trovare il grafico nella scena. Per questo motivo, la maggior parte delle immagini salvate non
hanno bordi come le immagini delle scene 1, 2 o 4, ma solo il grafico. Il
grafico deve essere orientato correttamente affinché lo strumento di ricerca dei grafici funzioni in modo ottimale.
In Android 17 e versioni successive, scene3 utilizza i marker ArUco
per il rilevamento dei grafici.

Figura 108.Grafico scene3.
test_edge_enhancement
Verifica che il parametro android.edge.mode sia applicato correttamente. Acquisisce
immagini non rielaborate per ogni modalità di bordo e restituisce la nitidezza dell'immagine
di output e i metadati del risultato dell'acquisizione. Elabora una richiesta di acquisizione con una determinata
modalità bordo, sensibilità, tempo di esposizione, distanza di messa a fuoco e parametro
della superficie di output. In Android 17 e versioni successive, utilizza i marker ArUco
per definire l'area del grafico che contiene gli spigoli vivi necessari.
Passaggio:modalità HQ (2) più nitida della modalità OFF (0). FAST (1) più nitida
della modalità OFF. Modalità HQ più nitida o uguale alla modalità FAST.
API testate:
Parametri della videocamera interessati:
EDGE_MODE
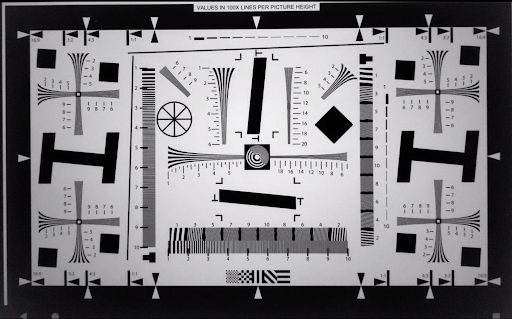
Figura 109. Esempio di test_edge_enhancement edge=0.
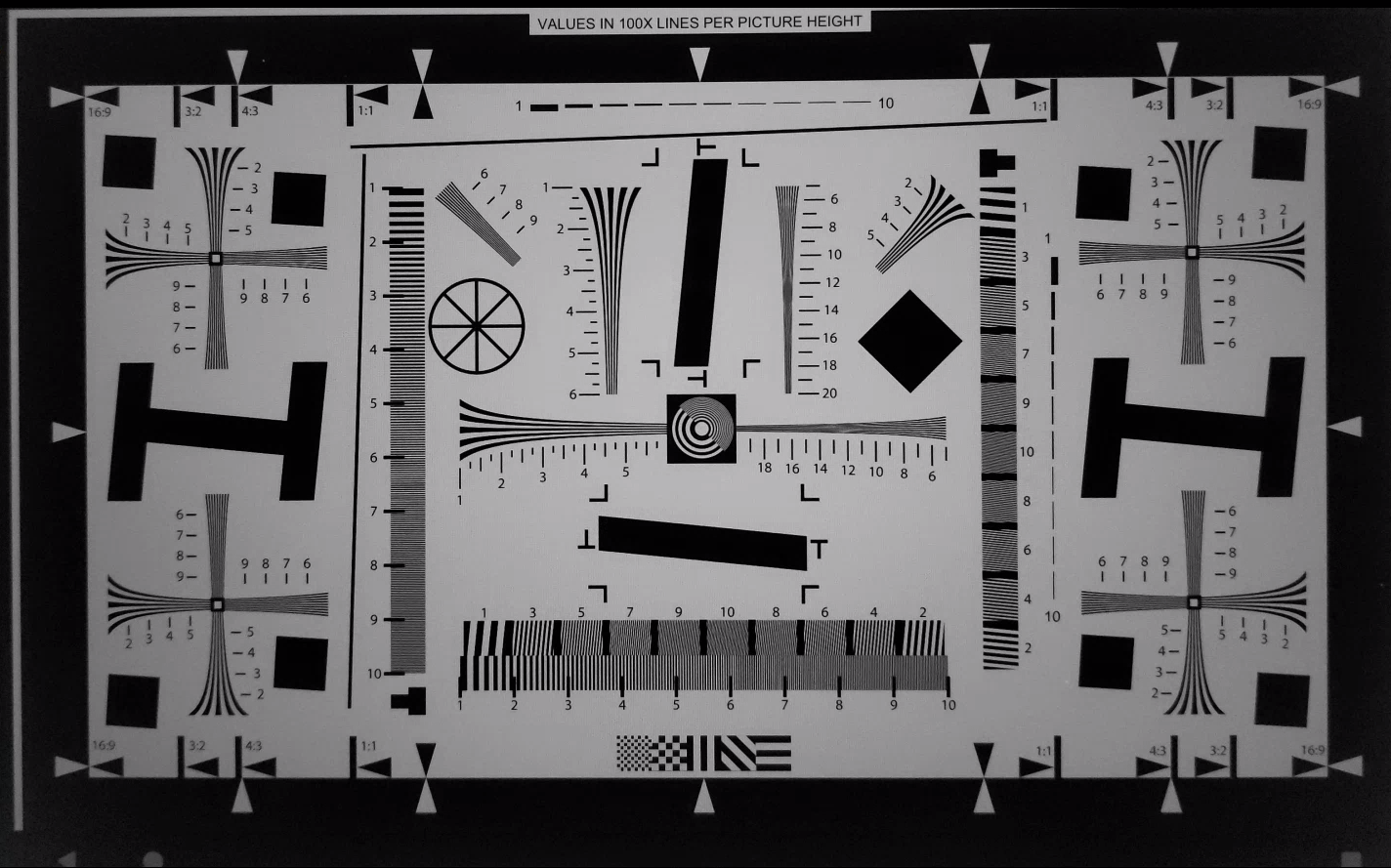
Figura 110. Esempio di test_edge_enhancement edge=1 (modalità veloce).
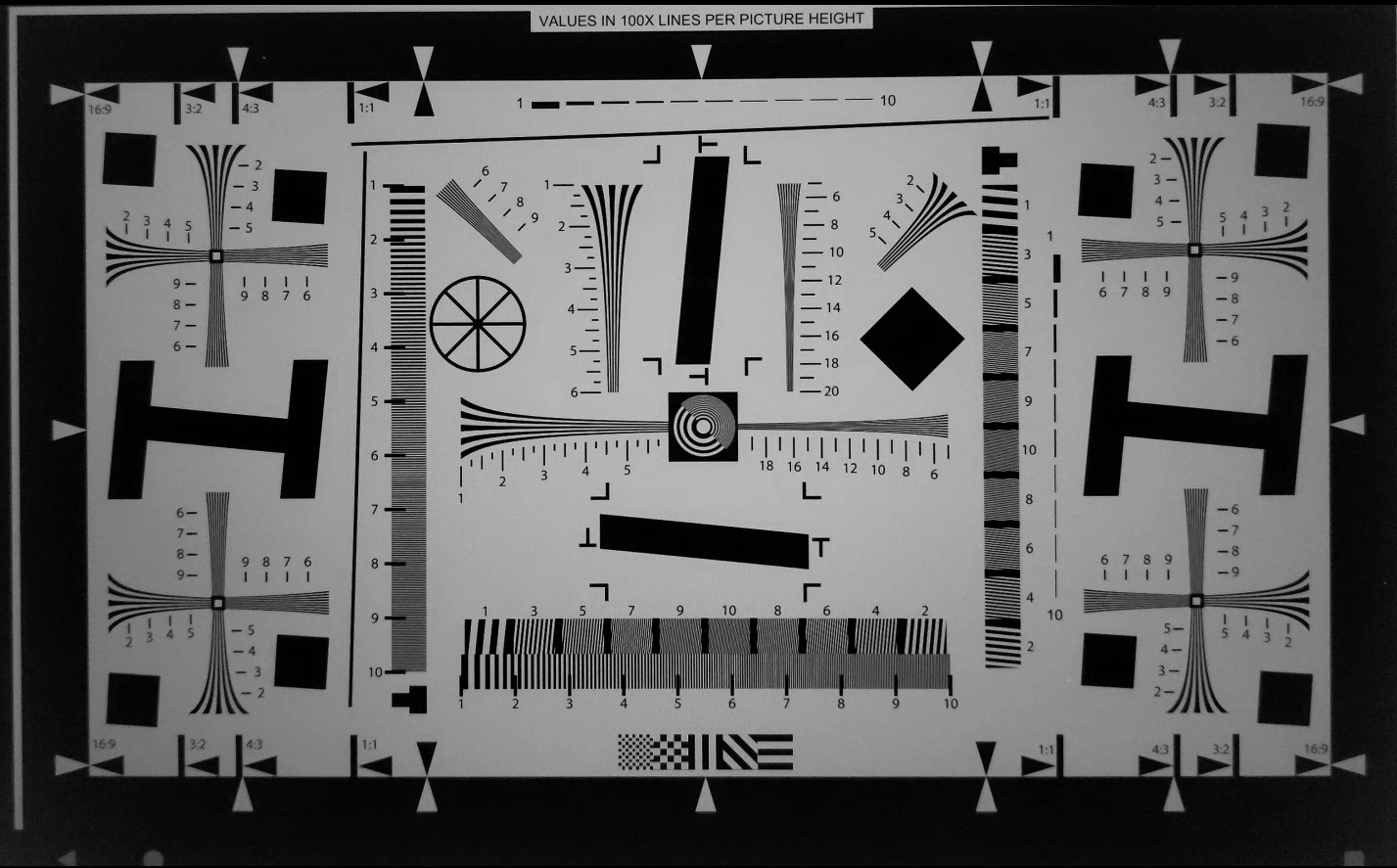
Figura 111.Esempio di test_edge_enhancement edge=2 (modalità di alta qualità).
test_flip_mirror
Verifica che l'immagine sia orientata correttamente in base alla sezione 7.5.2 Fotocamera anteriore del CDD. In Android 17 e versioni successive, utilizza i marker ArUco per convalidare sia la presenza che l'orientamento del grafico. Le immagini specchiate, capovolte o ruotate possono essere identificate dalla funzionalità a forma di rombo vicino al centro.
Superato:tutti i marcatori vengono rilevati e allineati correttamente. L'immagine non è capovolta, specchiata o ruotata.
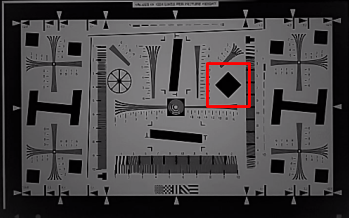
Figura 112. Esempio di patch della scena test_flip_mirror.
test_imu_drift
Verifica se l'unità di misura inerziale (IMU) ha un output stabile per 30 secondi mentre il dispositivo è fermo e acquisisce un'anteprima in alta definizione.
API testate:
android.hardware.Sensorandroid.hardware.SensorEventandroid.hardware.Sensor#TYPE_GYROSCOPEandroid.hardware.Sensor#TYPE_ROTATION_VECTOR
Pass:
- La deriva del giroscopio è inferiore a 0,01 rad durante il tempo di test.
- La varianza della lettura del giroscopio è inferiore a 1E-7 rad2/s2/Hz durante il tempo di test.
- La deriva del vettore di rotazione è inferiore a 0,01 rad durante il test.
- (Non ancora obbligatorio) La deriva del giroscopio è inferiore a 1 grado al secondo.
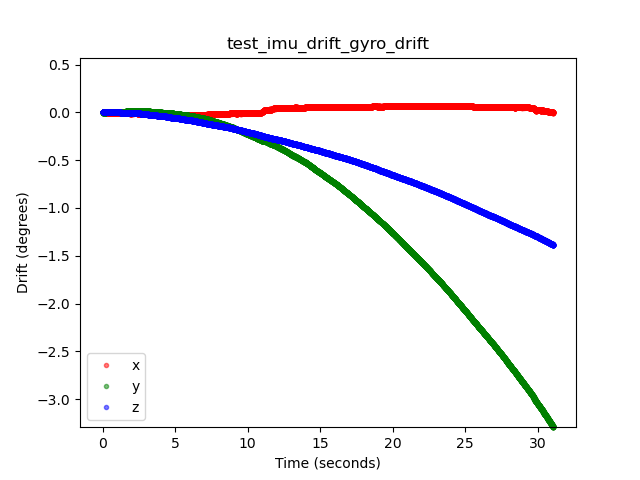
Figura 113. Esempio di deriva del giroscopio test_imu_drift.
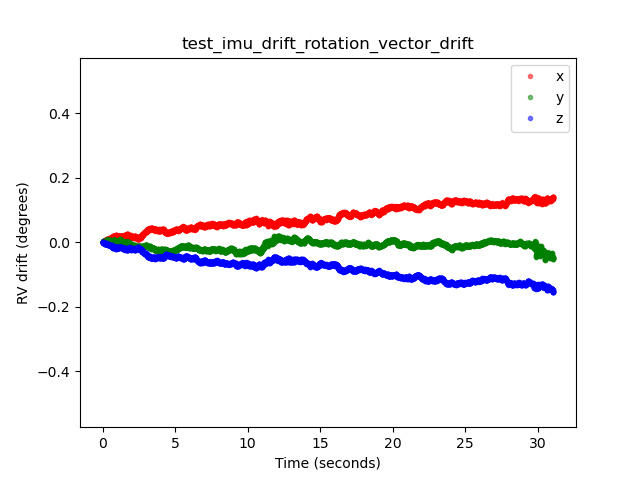
Figura 114. Esempio di deriva del vettore di rotazione test_imu_drift.
test_landscape_to_portrait
Verifica se l'override da orizzontale a verticale funziona correttamente per i sensori orientati orizzontalmente.
API testate:
android.hardware.camera2.CameraCharacteristics#SCALER_AVAILABLE_ROTATE_AND_CROP_MODESandroid.hardware.camera2.CameraCharacteristics#SENSOR_ORIENTATIONandroid.hardware.camera2.CameraCharacteristics#getCameraCharacteristics
Superato:il test individua un grafico con la rotazione prevista (0 gradi quando l'override da orizzontale a verticale è disattivato, 90 gradi quando è attivato).
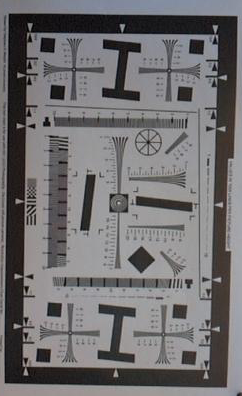
Figura 115. Esempio di test_landscape_to_portrait.
test_lens_movement_reporting
Verifica se il flag di movimento dell'obiettivo viene segnalato correttamente. Acquisisce una raffica di 24 immagini con i primi 12 fotogrammi alla distanza di messa a fuoco ottimale (come rilevato da 3A) e gli ultimi 12 fotogrammi alla distanza di messa a fuoco minima. Intorno al fotogramma 12, l'obiettivo si sposta, causando una riduzione della nitidezza. La nitidezza si stabilizza quando l'obiettivo raggiunge la posizione finale.
Il flag di movimento dell'obiettivo deve essere impostato in tutti i fotogrammi in cui la nitidezza è intermedia rispetto alla nitidezza dei primi fotogrammi con l'obiettivo fermo alla distanza focale ottimale e degli ultimi fotogrammi in cui l'obiettivo è fermo alla distanza focale minima. Il frame esatto in cui si sposta l'obiettivo non è importante: ciò che conta è che il flag di movimento venga attivato quando l'obiettivo è in movimento.
In Android 17 e versioni successive, questo test utilizza i marker ArUco per definire l'area del grafico che contiene i bordi netti necessari. Questo metodo fornisce un rilevamento stabile per le videocamere da applicazioni ultra grandangolari (UW) a tele.
API testate:
android.hardware.camera2.CameraCharacteristics#LENS_INFO_MINIMUM_FOCUS_DISTANCEandroid.hardware.camera2.CaptureResult#LENS_STATEandroid.hardware.camera2.CaptureResult#LENS_FOCUS_DISTANCEandroid.hardware.camera2.CaptureResult#SENSOR_TIMESTAMPandroid.hardware.camera2.CaptureRequest#LENS_FOCUS_DISTANCE
Superato:il flag di movimento dell'obiettivo è True nel frame con variazione di nitidezza.
Meccanismi di errore:
lens_moving: True(android.hardware.camera2.CaptureResult#LENS_STATE= 1) intest_log.DEBUGviene asserito solo nei frame in cui la nitidezza non cambia.- I fotogrammi con
lens_moving: False(android.hardware.camera2.CaptureResult#LENS_STATE= 0) intest_log.DEBUGpresentano una differenza di nitidezza rispetto ai primi fotogrammi alla distanza focale ottimale o agli ultimi fotogrammi alla distanza di messa a fuoco minima.
test_reprocess_edge_enhancement
Verifica se i metodi di rielaborazione supportati per il miglioramento dei contorni funzionano correttamente. Elabora una richiesta di acquisizione con una determinata modalità edge di rielaborazione e confronta diverse modalità di acquisizione con le modalità edge di rielaborazione disattivate.
API testate:
android.hardware.camera2.CaptureRequest#EDGE_MODEandroid.hardware.camera2.CaptureRequest#REPROCESS_EFFECTIVE_EXPOSURE_FACTOR
Superato:la nitidezza per le diverse modalità di bordo è corretta. HQ (modalità 2) è
più nitida di OFF (modalità 0) e il miglioramento tra le diverse modalità è simile.
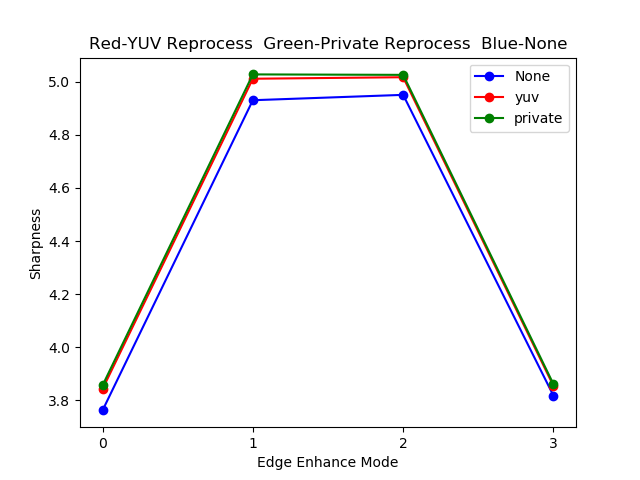
Figura 116. Esempio di grafico test_reprocess_edge_enhancement.
scena4
scene4 è costituito da un cerchio nero su sfondo bianco all'interno di un quadrato.
I test in scene4 possono essere sensibili all'allineamento, quindi a partire da Android
15, puoi utilizzare check_alignment.py nella
directory degli strumenti per attivare un controllo dell'allineamento del DUT e del grafico.
Figura 117. Esempio di scene4.
test_30_60fps_preview_fov_match
Test che dimostrano che i video di anteprima a 30 FPS e 60 FPS hanno lo stesso campo visivo. Il test acquisisce due video, uno a 30 FPS e l'altro a 60 FPS. Da ogni video viene selezionato un fotogramma rappresentativo e analizzato per verificare che le modifiche al campo visivo nei due video rientrino nelle specifiche. Verifica che le proporzioni del cerchio rimangano costanti, che il centro del cerchio rimanga stabile e che il raggio del cerchio rimanga costante.
API testate:
android.hardware.camera2.CaptureRequest#CONTROL_AE_TARGET_FPS_RANGEandroid.hardware.camera2.CaptureRequest#SENSOR_FRAME_DURATIONandroid.hardware.camera2.CaptureRequest#SENSOR_EXPOSURE_TIMEandroid.hardware.camera2.CaptureResult#LENS_DISTORTIONandroid.hardware.camera2.CaptureResult#LENS_FOCAL_LENGTHandroid.hardware.camera2.CaptureResult#LENS_INTRINSIC_CALIBRATION
Superato:le immagini non sono allungate, il centro delle immagini non differisce di oltre il 3% e la variazione massima delle proporzioni tra i video a 30 FPS e 60 FPS non supera il 7,5%.
Meccanismi di errore:
- Il cerchio del video a 30 FPS ha dimensioni notevolmente diverse rispetto al video a 60 FPS.
- Il cerchio nell'immagine acquisita è distorto dalla pipeline di elaborazione.
- Il cerchio nell'immagine acquisita viene ritagliato a causa di una richiesta di acquisizione con proporzioni estreme che riducono l'altezza o la larghezza dell'immagine.
- Il cerchio nell'immagine acquisita ha un riflesso al centro e non appare completamente riempito.
test_aspect_ratio_and_crop
Verifica se le immagini sono distorte o ritagliate in modo imprevisto nella pipeline di elaborazione delle immagini. Scatta foto di un cerchio in tutti i formati. Verifica che il cerchio non sia distorto, che non si sposti dal centro dell'immagine e che non cambi dimensioni in modo errato con proporzioni o risoluzioni diverse.
API testate:
android.hardware.camera2.CaptureResult#LENS_DISTORTIONandroid.hardware.camera2.CaptureResult#LENS_FOCAL_LENGTHandroid.hardware.camera2.CaptureResult#LENS_INTRINSIC_CALIBRATION
Superato: le immagini non vengono allungate, il centro delle immagini non differisce di oltre il 3% e il campo visivo massimo possibile viene mantenuto.
Meccanismi di errore:
- La videocamera non è allineata al cerchio visualizzato sul tablet al centro della scena acquisita.
- Il cerchio nell'immagine acquisita è distorto dalla pipeline di elaborazione.
- L'immagine a risoluzione inferiore viene ritagliata due volte nella pipeline di elaborazione delle immagini, creando un campo visivo diverso tra le immagini ad alta e bassa risoluzione.
- Il cerchio nell'immagine acquisita viene ritagliato a causa di una richiesta di acquisizione con proporzioni estreme che riducono l'altezza o la larghezza dell'immagine.
- Il cerchio nell'immagine acquisita ha un riflesso al centro e non appare completamente riempito.
test_multi_camera_alignment
Verifica i parametri di calibrazione della videocamera relativi al posizionamento della videocamera per sistemi multi-camera. Utilizzando le fotocamere secondarie fisiche multicamera, scatta una foto con una delle fotocamere fisiche. Trova il centro del cerchio. Proietta il centro del cerchio sulle coordinate mondiali per ogni videocamera. Confronta la differenza tra i centri dei cerchi delle videocamere in coordinate mondiali. Proietta nuovamente la coordinata mondiale in coordinate pixel e la confronta con le originali come controllo di validità. Confronta le dimensioni dei cerchi per verificare se le lunghezze focali delle videocamere sono diverse.
API testate:
android.hardware.camera2.CameraCharacteristics#getPhysicalCameraIds()android.hardware.camera2.CameraCharacteristics#LENS_DISTORTIONandroid.hardware.camera2.CameraCharacteristics#LENS_INFO_AVAILABLE_FOCAL_LENGTHSandroid.hardware.camera2.CameraCharacteristics#LENS_INTRINSIC_CALIBRATIONandroid.hardware.camera2.CameraCharacteristics#LENS_POSE_ROTATIONandroid.hardware.camera2.CameraCharacteristics#LENS_POSE_TRANSLATIONandroid.hardware.camera2.CameraMetadata#REQUEST_AVAILABLE_CAPABILITIES_LOGICAL_MULTI_CAMERAandroid.hardware.camera2.CaptureRequest#SCALER_CROP_REGIONandroid.hardware.camera2.CaptureRequest#DISTORTION_CORRECTION_MODE
Superato:i centri e le dimensioni dei cerchi sono come previsto nelle immagini proiettate rispetto alle immagini acquisite utilizzando i dati di calibrazione della fotocamera e le lunghezze focali.
Meccanismi di errore:
LENS_INTRINSIC_CALIBRATION,LENS_POSE_TRANSLATIONeLENS_POSE_ROTATIONsono valori di progettazione e non dati di calibrazione effettivi.- Il sistema di videocamere non è appropriato per la configurazione del test, ad esempio, testare un sistema di videocamere grandangolare e ultragrandangolare con il banco di prova RFoV. Per ulteriori informazioni, consulta le Domande frequenti su ITS-in-a-box per le videocamere, domanda 1.
test_preview_aspect_ratio_and_crop
Analogamente al test test_aspect_ratio_and_crop per le acquisizioni statiche, controlla i formati di anteprima supportati per verificare che i fotogrammi di anteprima non siano allungati o ritagliati in modo inappropriato. Verifica che le proporzioni del cerchio non cambino, che le immagini ritagliate mantengano il cerchio al centro del frame e che le dimensioni del cerchio non cambino per un formato costante o con risoluzioni diverse (controllo del campo visivo).
API testate:
android.hardware.camera2.CaptureResult#LENS_DISTORTIONandroid.hardware.camera2.CaptureResult#LENS_FOCAL_LENGTHandroid.hardware.camera2.CaptureResult#LENS_INTRINSIC_CALIBRATIONandroid.hardware.camera2.CameraCharacteristics#SCALAR_AVAILABLE_CAPABILITIES_STREAM_USE_CASESandroid.media.MediaRecorderandroid.media.CamcorderProfile
Superato: le immagini non vengono allungate, il centro delle immagini non differisce di oltre il 3% e il campo visivo massimo possibile viene mantenuto.
test_preview_stabilization_fov
Controlla le dimensioni dell'anteprima supportate per assicurarsi che il campo visivo venga ritagliato
in modo appropriato. Il test acquisisce due video, uno con la stabilizzazione dell'anteprima
ON e l'altro senza OFF. Un frame rappresentativo viene
selezionato da ogni video e analizzato per verificare che le modifiche al campo visivo nei
due video rientrino nelle specifiche.
API testate:
android.hardware.camera2.CameraCharacteristics#SCALAR_AVAILABLE_CAPABILITIES_STREAM_USE_CASESandroid.media.MediaRecorderandroid.media.CamcorderProfile
Superato:le proporzioni del cerchio rimangono pressoché costanti, la posizione del centro del cerchio rimane stabile e le dimensioni del cerchio non cambiano di oltre il 20%.
test_video_aspect_ratio_and_crop
Mostra video di un cerchio all'interno di un quadrato in tutti i formati video. Estrae i fotogrammi chiave e verifica che le proporzioni del cerchio non cambino, che le immagini ritagliate mantengano il cerchio al centro e che le dimensioni del cerchio non cambino per un formato costante o con risoluzioni diverse (controllo del campo visivo).
API testate:
android.hardware.camera2.CameraCharacteristics#SCALAR_AVAILABLE_CAPABILITIES_STREAM_USE_CASESandroid.hardware.camera2.CaptureResult#LENS_DISTORTIONandroid.hardware.camera2.CaptureResult#LENS_FOCAL_LENGTHandroid.hardware.camera2.CaptureResult#LENS_INTRINSIC_CALIBRATIONandroid.media.MediaRecorderandroid.media.CamcorderProfile
Superato:i fotogrammi video non vengono allungati, il centro dei fotogrammi non differisce di più del 3% e il campo visivo massimo possibile viene mantenuto.
scene5
scene5 richiede una scena grigia illuminata in modo uniforme. Ciò è possibile grazie a un diffusore
posizionato sopra l'obiettivo della videocamera. Ti consigliamo il seguente diffusore:
www.edmundoptics.com/optics/window-diffusers/optical-diffusers/opal-diffusing-glass/46168.
Per preparare la scena, collega un diffusore davanti alla videocamera e punta quest'ultima verso una fonte di illuminazione di circa 2000 lux. Le immagini acquisite per
scene5 richiedono un'illuminazione diffusa senza caratteristiche evidenti. Di seguito è riportata
un'immagine di esempio:
Figura 118. Esempio di acquisizione scene5.
Poiché per questa scena non sono necessari tablet o controller, i test utilizzano il
testbed TEST_BED_MANUAL. Per un esempio, vedi
File config.yml per i test manuali.
Il file config.yml predefinito non include TEST_BED_MANUAL, ma puoi
modificare il file per includerlo.
test_lens_shading_and_color_uniformity
Verifica che la correzione dell'ombreggiatura dell'obiettivo venga applicata in modo appropriato e che il colore di una scena uniforme monocromatica sia distribuito in modo uniforme. Esegue questo test su un frame YUV con 3A automatico. L'ombreggiatura dell'obiettivo viene valutata in base al canale Y. Misura il valore medio di y per ogni blocco di campioni specificato e determina l'esito positivo o negativo confrontandolo con il valore di y centrale. Il test di uniformità del colore viene valutato nello spazio rosso-verde e blu-verde.
API testate:
android.hardware.camera2.CaptureRequest#CONTROL_AE_MODEandroid.hardware.camera2.CaptureRequest#CONTROL_AWB_MODE
Superato:al raggio specificato dell'immagine, la varianza del valore rosso-verde e blu-verde deve essere inferiore al 20% per superare il test.
Meccanismi di errore:
- Vignettatura eccessiva nelle immagini
- Artefatti con bordo nero nelle immagini

Figura 119. test_lens_shading_and_color_uniformity_y_plane.

Figura 120. test_lens_shading_and_color_uniformity_color_uniformity.

Figura 121. test_lens_shading_and_color_uniformity_lens_shading_result.
scene6
scene6 è una griglia di marker ArUco identificabili in modo univoco.
I test in scene6 possono essere sensibili all'allineamento, quindi a partire da
15, puoi utilizzare check_alignment.py nella
directory degli strumenti per attivare un controllo dell'allineamento del DUT e del grafico.
Figura 122. Esempio di scene6.
test_in_sensor_zoom
Esegue il test del comportamento della funzionalità di zoom nel sensore della videocamera, che produce immagini raw ritagliate.
Con lo scenario d'uso dello stream impostato su
CROPPED_RAW,
il test esegue due acquisizioni nell'intervallo di zoom, un'immagine raw con campo visivo completo e un'immagine raw ritagliata. Il test converte le immagini in array RGB, ridimensiona l'immagine raw ritagliata a grandezza naturale alle dimensioni riportate da SCALER_RAW_CROP_REGION e calcola la differenza RMS 3D tra le due immagini.
API testate:
android.hardware.camera2.CameraCharacteristics#CONTROL_ZOOM_RATIO_RANGEandroid.hardware.camera2.CameraCharacteristics#SCALAR_AVAILABLE_CAPABILITIES_STREAM_USE_CASESandroid.hardware.camera2.CameraMetadata#SCALER_AVAILABLE_STREAM_USE_CASES_CROPPED_RAWandroid.hardware.camera2.CaptureRequest#CONTROL_ZOOM_RATIOandroid.hardware.camera2.CaptureResult#SCALER_RAW_CROP_REGION
Superato:la differenza RMS 3D tra l'immagine raw ritagliata ridimensionata e l'immagine raw con campo visivo completo è inferiore alla soglia impostata nel test.
test_zoom
Esegue il test del comportamento dello zoom della fotocamera dall'obiettivo ultrawide all'obiettivo grandangolare. Acquisisce acquisizioni nell'intervallo di zoom e controlla se i marker ArUco diventano più grandi man mano che la fotocamera esegue lo zoom. Il test verifica anche se la posizione del marcatore centrale cambia in modo prevedibile a ogni acquisizione. La distanza dal centro dell'indicatore centrale al centro dell'immagine può cambiare a una velocità costante rispetto al rapporto di zoom fino a un cambio di sensore fotocamera fisica oppure può cambiare in modo monotono verso la posizione dello stesso indicatore dopo un cambio di sensore fotocamera fisica. L'app Jetpack Camera (JCA) deve essere installata sul dispositivo prima del test.
API testate:
android.hardware.camera2.CameraCharacteristics#CONTROL_ZOOM_RATIO_RANGEandroid.hardware.camera2.CameraCharacteristics#LENS_INFO_AVAILABLE_FOCAL_LENGTHSandroid.hardware.camera2.CaptureRequest#CONTROL_ZOOM_RATIOandroid.hardware.camera2.CaptureResult#LENS_FOCAL_LENGTH
Superato:le dimensioni relative del marker ArUco acquisito sono accurate rispetto al rapporto di zoom richiesto per verificare che la videocamera esegua lo zoom correttamente e la distanza del marker dal centro dell'immagine cambia in base ai criteri indicati nella descrizione del test.
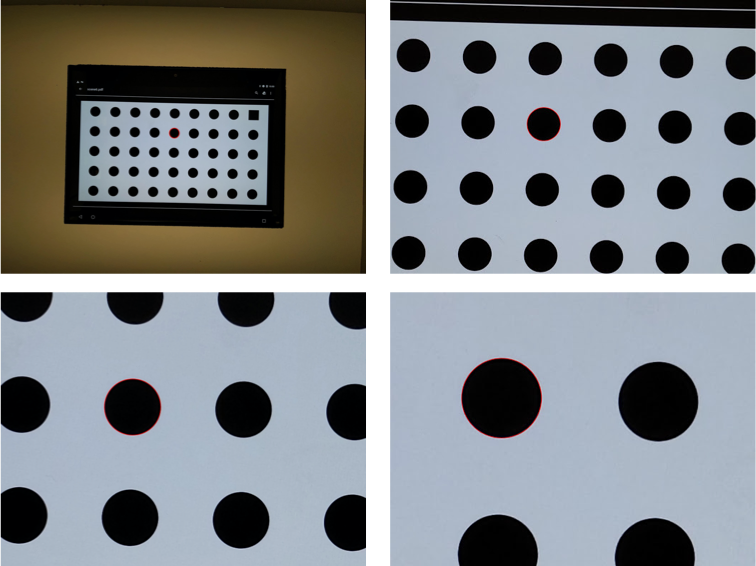
Figura 123. test_zoom per trovare il contorno dell'indicatore ArUco più vicino al centro.
test_low_latency_zoom
Esegue il test del comportamento dello zoom a bassa latenza della videocamera. Acquisisce immagini nell'intervallo di zoom
con android.control.settingsOverride = 1 (SETTINGS_OVERRIDE_ZOOM) e verifica
se i marcatori nelle immagini di output corrispondono ai rapporti di zoom nei metadati
dell'acquisizione. La stessa sessione di acquisizione della videocamera viene utilizzata per la convergenza 3A e
per acquisire le foto.
API testate:
android.hardware.camera2.CameraCharacteristics#CONTROL_AVAILABLE_SETTINGS_OVERRIDESandroid.hardware.camera2.CameraCharacteristics#CONTROL_ZOOM_RATIO_RANGEandroid.hardware.camera2.CaptureRequest#CONTROL_SETTINGS_OVERRIDEandroid.hardware.camera2.CaptureRequest#CONTROL_ZOOM_RATIOandroid.hardware.camera2.CaptureResult#CONTROL_SETTINGS_OVERRIDE
Superato:le dimensioni relative del marcatore acquisito sono accurate rispetto ai metadati dei risultati del rapporto di zoom.
test_preview_video_zoom_match
Test che durante la registrazione e lo zoom, l'anteprima video e l'output video visualizzano e registrano lo stesso output. Calcola le dimensioni dell'indicatore più vicino al centro a diversi rapporti di zoom e verifica se le dimensioni dell'indicatore aumentano all'aumentare del rapporto di zoom.
API testate:
android.hardware.camera2.CameraCharacteristics#CONTROL_ZOOM_RATIO_RANGEandroid.hardware.camera2.CameraCharacteristics#LENS_INFO_AVAILABLE_FOCAL_LENGTHSandroid.hardware.camera2.CaptureRequest#CONTROL_ZOOM_RATIOandroid.hardware.camera2.CaptureResult#LENS_FOCAL_LENGTH
Superato:le dimensioni relative del marcatore acquisito sono accurate rispetto al rapporto di zoom richiesto nel video e nell'anteprima.
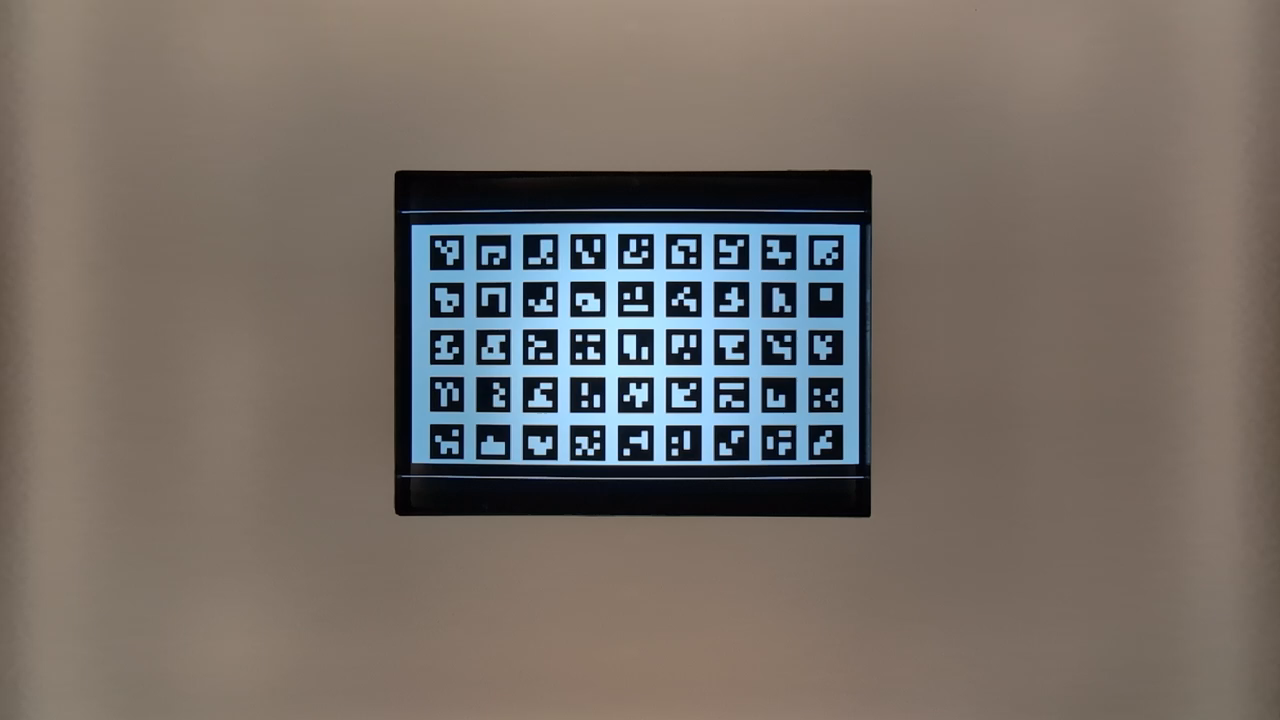
Figura 124. HD_1280x720_key_frame.png (prima dello zoom).
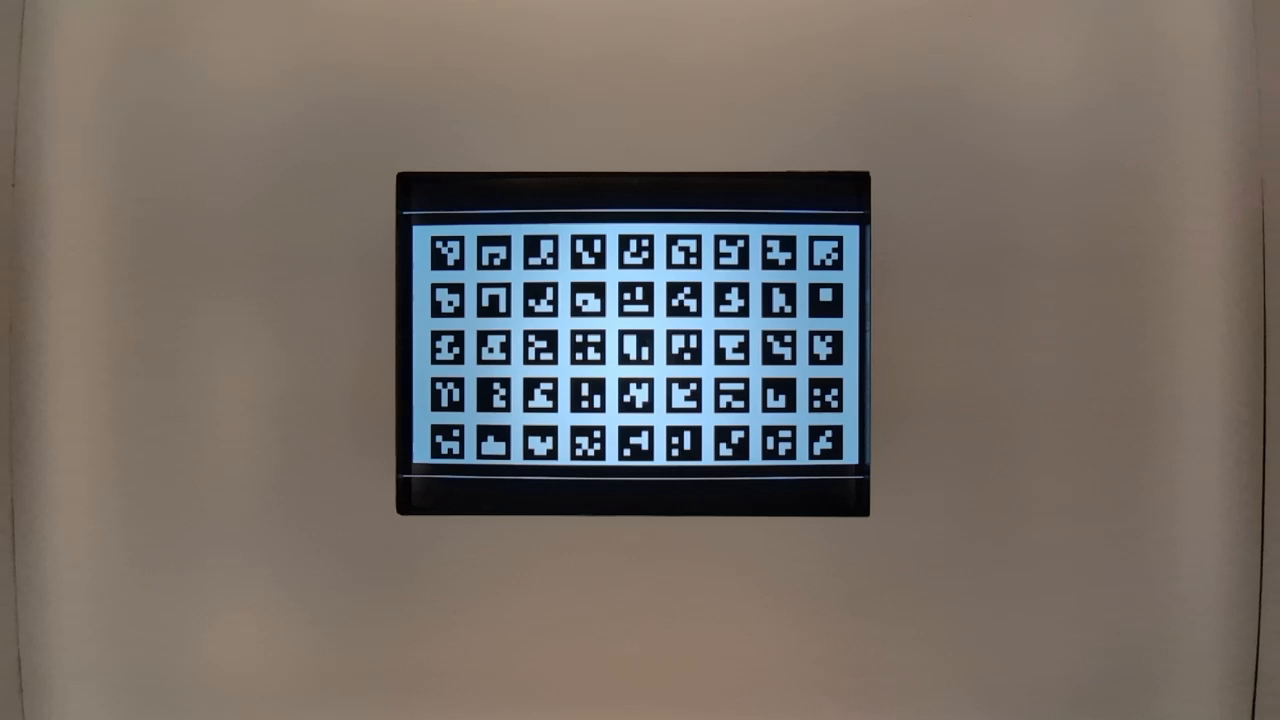
Figura 125. preview_1280x720_key_frame.png (prima dello zoom).
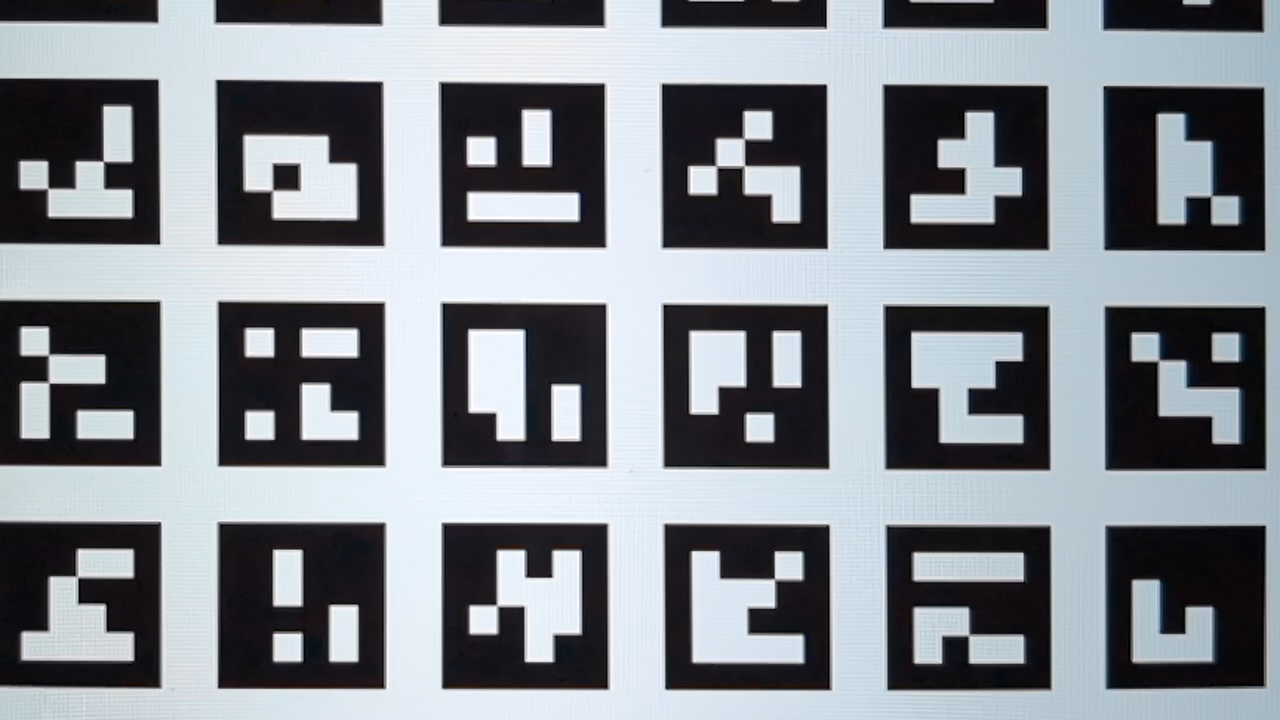
Figura 126. HD_1280x720_key_frame.png (dopo lo zoom).
Figura 127. preview_1280x720_key_frame.png (dopo lo zoom).
test_preview_zoom
Test che verificano che il rapporto di zoom di ogni frame di anteprima corrisponda ai metadati di acquisizione corrispondenti dall'obiettivo ultrawide all'obiettivo grandangolare. Il test acquisisce i frame di anteprima nell'intervallo di zoom e trova il marcatore ArUco più vicino al centro. Il test verifica quindi se la posizione del marcatore centrale cambia in modo prevedibile a ogni acquisizione. La distanza dal centro dell'indicatore centrale al centro dell'immagine può cambiare a una velocità costante rispetto al rapporto di zoom fino a un cambio di sensore fotocamera fisica oppure può cambiare in modo monotono verso la posizione dello stesso indicatore dopo un cambio di sensore fotocamera fisica.
API testate:
android.hardware.camera2.CameraCharacteristics#CONTROL_ZOOM_RATIO_RANGEandroid.hardware.camera2.CameraCharacteristics#LENS_INFO_AVAILABLE_FOCAL_LENGTHSandroid.hardware.camera2.CaptureRequest#CONTROL_ZOOM_RATIOandroid.hardware.camera2.CaptureResult#LENS_FOCAL_LENGTH
Superato:le dimensioni relative del marcatore ArUco selezionato sono accurate per il rapporto di zoom segnalato del risultato di acquisizione corrispondente per tutti i frame di anteprima. La distanza relativa dell'indicatore selezionato dal centro dell'immagine è precisa per il rapporto di zoom segnalato del risultato di acquisizione corrispondente di tutti i fotogrammi di anteprima.
Figura 128. test_preview_zoom images showing selected marker closest to the center
test_session_characteristics_zoom
Esegue il test dell'intervallo del rapporto di zoom per tutte le configurazioni di sessione supportate elencate in
CameraCharacteristics#INFO_SESSION_CONFIGURATION_QUERY_VERSION.
Per ciascuna di queste configurazioni, se
CameraDeviceSetup#isSessionConfigurationSupported
restituisce true, il test verifica che sia possibile raggiungere l'intervallo del rapporto di zoom restituito in
CameraDeviceSetup#getSessionCharacteristics.
API testate:
android.hardware.camera2.CameraCharacteristics#INFO_SESSION_CONFIGURATION_QUERY_VERSIONandroid.hardware.camera2.CameraDevice.CameraDeviceSetup#isSessionConfigurationSupportedandroid.hardware.camera2.CameraDevice.CameraDeviceSetup#getSessionCharacteristics
Superato:è possibile raggiungere i rapporti di zoom minimo e massimo per ogni SessionConfiguration supportato elencato in CameraCharacteristics#INFO_SESSION_CONFIGURATION_QUERY_VERSION.
scene7
scene7 è una cornice rettangolare divisa in quattro quadranti uguali, ciascuno riempito
con un colore diverso. Al centro del rettangolo si trova un grafico con bordo inclinato
per i controlli della nitidezza. Quattro marker ArUco sono allineati ai quattro angoli esterni
del rettangolo per facilitare l'ottenimento di coordinate accurate del frame
rettangolare principale a diversi rapporti di zoom.
Figura 129. scene7.
test_multi_camera_switch
Questo test verifica che durante la registrazione dell'anteprima a rapporti di zoom variabili, il passaggio tra gli obiettivi ultra grandangolare (UW) e grandangolare (W) produca valori RGB simili.
Il test utilizza diversi rapporti di zoom all'interno dell'intervallo predefinito per eseguire una registrazione di anteprima dinamica e identificare il punto in cui la fotocamera fisica cambia. Questo punto segna il passaggio dall'obiettivo UW all'obiettivo W.
I frame acquisiti in corrispondenza e prima del punto di crossover vengono analizzati per l'esposizione automatica (AE), il bilanciamento del bianco automatico (AWB) e la messa a fuoco automatica (AF).
Il controllo AE verifica che la variazione di luminanza rientri nell'intervallo previsto per le immagini delle lenti UW e W. Il controllo del bilanciamento del bianco verifica che i rapporti tra rosso e verde e tra blu e verde rientrino nei valori di soglia per le immagini degli obiettivi UW e W. Il controllo AF valuta il valore di stima della nitidezza in base alla magnitudo media del gradiente tra le immagini dell'obiettivo UW e W.
Durante l'esecuzione di questo test, se l'effetto moiré interferisce con i risultati, utilizza un tablet con una risoluzione più elevata dall'elenco dei tablet approvati da Camera ITS.
API testate:
android.hardware.camera2.CameraCharacteristics#CONTROL_ZOOM_RATIO_RANGEandroid.hardware.camera2.CaptureRequest#CONTROL_ZOOM_RATIOandroid.media.CamcorderProfileandroid.media.MediaRecorder
Superato:per superare il test, devono essere superati i controlli AE e AWB. I risultati del controllo AF vengono utilizzati solo a scopo di registrazione. Di seguito sono riportati i criteri per ogni controllo:
- Controllo AE: la variazione di luminanza (valore Y) tra le immagini dell'obiettivo UW e W deve
essere inferiore al 4% per tutte le patch di colore se il dispositivo supporta sia
ae_regionscheawb_regions. Se è supportato soloae_regions, solo i valori della patch di colore grigio devono soddisfare i criteri. - Controllo AWB: la differenza tra i valori rosso-verde e blu-verde per le immagini degli obiettivi UW e W deve essere inferiore al 3% per la patch di colore grigio e inferiore al 10% per le altre patch di colore se il dispositivo supporta sia
ae_regionssiaawb_regions. - Controllo AF: la nitidezza dell'immagine per l'acquisizione con l'obiettivo W deve essere superiore a quella con l'acquisizione UW.

Figura 130. Patch grigio scattato con l'obiettivo UW.

Figura 131. Patch grigio scattata con l'obiettivo W.
scene8
scene8 è una cornice rettangolare divisa in quattro regioni uguali, ognuna contenente
un ritratto scattato con un'esposizione diversa o sovrapposto a una tonalità di colore diversa (tonalità blu, maggiore esposizione, minore esposizione, tonalità gialla).
Quattro marker ArUco sono allineati ai quattro angoli esterni del rettangolo
per ottenere coordinate precise del frame del rettangolo principale.

Figura 132. Esempio di scene8.
test_ae_awb_regions
Verifica che i valori RGB e di luminanza differiscano durante la registrazione dell'anteprima in diverse regioni AE e AWB.
Il test registra un'anteprima di 8 secondi, eseguendo la misurazione AE e AWB su ogni quadrante per 2 secondi ciascuno. Il test estrae quindi un frame dalla registrazione dell'anteprima di ogni regione e utilizza i frame estratti per eseguire i seguenti controlli AE e AWB:
- Controllo AE: verifica che il frame che misura la regione con esposizione ridotta abbia un valore di luminanza superiore di oltre l'1% rispetto al frame che misura la regione con esposizione aumentata. In questo modo si verifica che le immagini vengano schiarite durante la misurazione di una regione scura.
- Controllo AWB: verifica che il rapporto tra rosso e blu (dei valori RGB medi dell'immagine) nel frame con la regione di misurazione blu sia superiore di oltre il 2% rispetto al frame con la regione di misurazione gialla. In questo modo si verifica che le immagini abbiano un valore RGB bilanciato quando si misura una regione gialla (calda) o blu (fredda).
API testate:
android.hardware.camera2.CaptureRequest#CONTROL_AWB_REGIONSandroid.hardware.camera2.CaptureRequest#CONTROL_AE_REGIONSandroid.hardware.camera2.CameraCharacteristics#CONTROL_MAX_REGIONS_AEandroid.hardware.camera2.CameraCharacteristics#CONTROL_MAX_REGIONS_AWB
Superato:entrambi i controlli AE e AWB vengono superati.

Figura 133. Misurazione del frame della regione scura con maggiore esposizione.

Figura 134. Regione più chiara della misurazione del frame con esposizione ridotta.
Meccanismi di errore:
Per questo test è essenziale il rilevamento accurato di tutti e quattro i marker ArUco. Se il rilevamento iniziale non riesce, il sistema tenta un secondo passaggio di rilevamento utilizzando una versione in bianco e nero dell'immagine. La seguente immagine in scala di grigi rappresenta la fase di elaborazione secondaria:

Figura 135. Disallineamento dei marcatori ArUco.
test_color_correction_mode_cct
Test COLOR_CORRECTION_MODE
con diverse temperature e tonalità di colore, verificando le variazioni dei rapporti RGB
rispetto alla scena di acquisizione, scene8.
API testate:
android.hardware.camera2.CaptureRequest#COLOR_CORRECTION_MODEandroid.hardware.camera2.CaptureResult#COLOR_CORRECTION_MODEandroid.hardware.camera2.CaptureRequest#COLOR_CORRECTION_COLOR_TEMPERATUREandroid.hardware.camera2.CaptureResult#COLOR_CORRECTION_COLOR_TEMPERATUREandroid.hardware.camera2.CaptureRequest#COLOR_CORRECTION_COLOR_TINTandroid.hardware.camera2.CaptureResult#COLOR_CORRECTION_COLOR_TINTandroid.hardware.camera2.CameraCharacteristics#COLOR_CORRECTION_COLOR_TEMPERATURE_RANGEandroid.hardware.camera2.CameraMetadata#COLOR_CORRECTION_MODE_CCTandroid.hardware.camera2.CameraCharacteristics#COLOR_CORRECTION_AVAILABLE_ABERRATION_MODES
Superato: i rapporti RGB mostrano gli aumenti o le diminuzioni previsti rispetto alle temperature e alle tonalità di colore selezionate.
Criteri di ignoramento dei test
Il test test_color_correction_mode_cct viene ignorato se viene soddisfatto uno dei seguenti
criteri:
- Il dispositivo ha un primo livello API (
first_api_level) pari o inferiore a 35. - Il dispositivo non fa pubblicità
COLOR_CORRECTION_MODE_CCTinCOLOR_CORRECTION_AVAILABLE_ABERRATION_MODES.
scene9
scene9 è composto da migliaia di cerchi di dimensioni e colori casuali per creare una
scena con ripetibilità molto bassa per mettere alla prova gli algoritmi di compressione JPEG.
Figura 136. Esempio di scene9.
test_jpeg_high_entropy
Test che verificano il funzionamento della compressione JPEG della fotocamera su scene9 con entropia elevata e
il fattore di qualità JPEG impostato al 100%. Il fattore di zoom viene aumentato per verificare che
la scena visualizzata sul tablet riempia il campo visivo della videocamera.
API testate:
Superato:il file JPEG è compresso, scritto e letto correttamente dal disco.
test_jpeg_quality
Esegue il test della qualità di compressione JPEG della fotocamera. Scorre le qualità JPEG tramite
android.jpeg.quality e verifica che le tabelle di quantizzazione cambino
correttamente.
API testate:
Pass:la matrice di quantizzazione diminuisce con l'aumentare della qualità. (La matrice rappresenta il fattore di divisione.)
Figura 137. Medie della matrice DQT di luma e croma della fotocamera posteriore di Pixel 4 rispetto alla qualità JPEG.
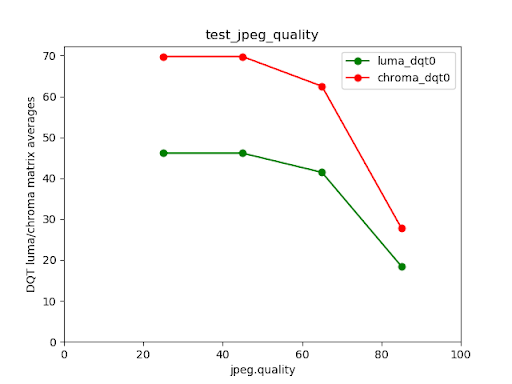
Figura 138. Esempio di test non riuscito.
scene_video
scene_video è una scena video composta da quattro cerchi di colori diversi che si muovono avanti e indietro a frame rate diversi su uno sfondo bianco.
Figura 139. Esempio di scene_video.
test_preview_frame_drop
Test che verifica che la frequenza fotogrammi di anteprima richiesta venga mantenuta con una scena dinamica. Questo test viene eseguito su tutte le videocamere esposte ad app di terze parti.
API testate:
android.hardware.camera2.CameraCharacteristics#CONTROL_AE_AVAILABLE_TARGET_FPS_RANGESandroid.hardware.camera2.CameraCharacteristics#SCALAR_AVAILABLE_CAPABILITIES_STREAM_USE_CASESandroid.hardware.camera2.CaptureResult#CONTROL_AE_TARGET_FPS_RANGEandroid.media.CamcorderProfileandroid.media.MediaRecorder
Superato:la frequenza fotogrammi dell'anteprima è al massimo dell'intervallo di frequenza fotogrammi richiesto e la variazione media tra i fotogrammi consecutivi è inferiore alla tolleranza relativa impostata nel test.
scene_extensions
I test scene_extensions sono per le estensioni della fotocamera e devono utilizzare
Camera ITS-in-a-Box,
in quanto richiedono un controllo preciso dell'ambiente di test. Inoltre,
tutte le infiltrazioni di luce devono essere controllate. Potrebbe essere necessario coprire il banco di prova,
il DUT e il tablet con un telo protettivo, nonché eliminare le infiltrazioni di luce dallo
schermo anteriore del DUT.
scene_hdr
La scena scene_hdr è costituita da un ritratto a sinistra e da un codice QR a basso contrasto a destra.
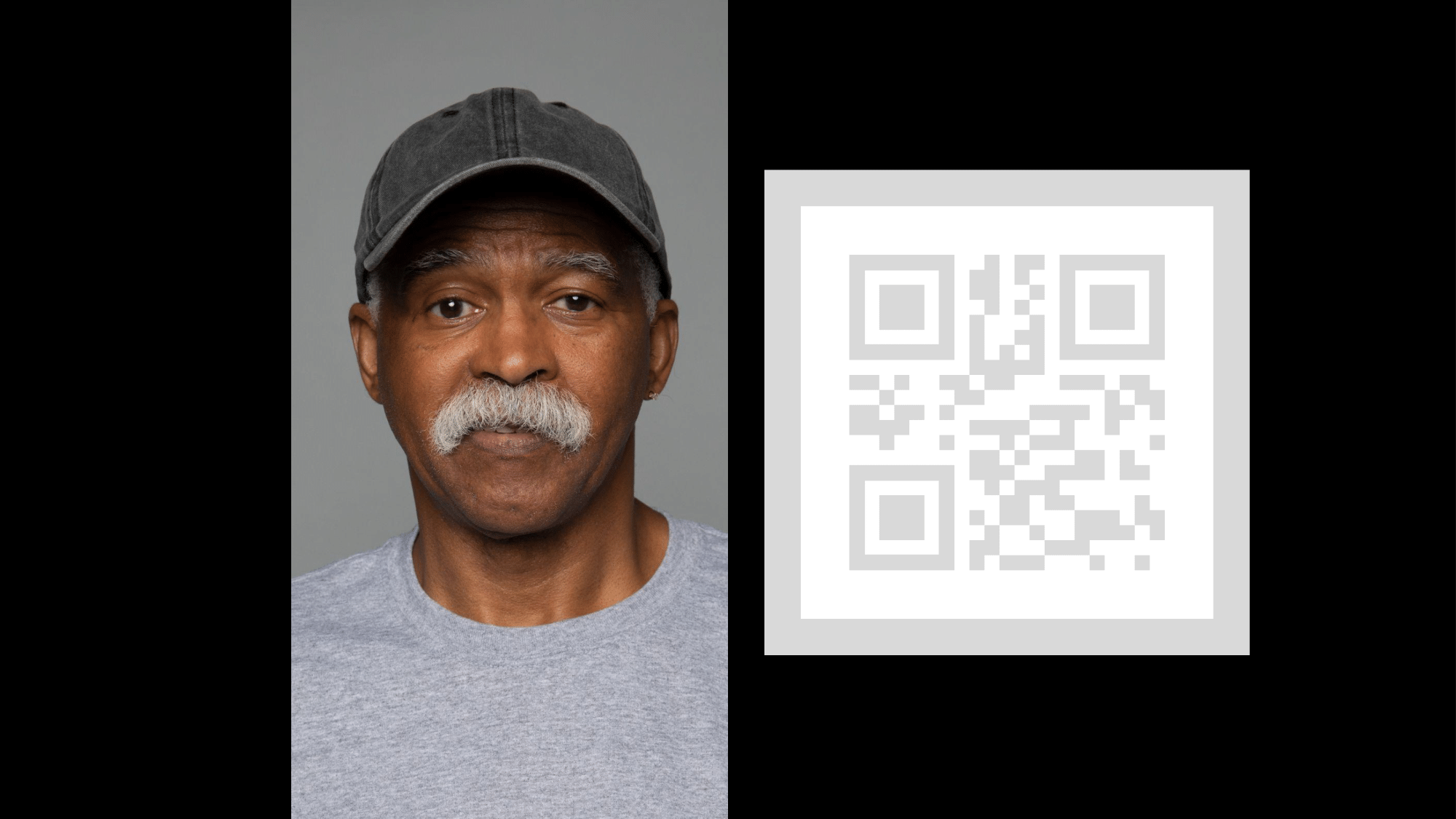
Figura 140. Esempio di scene_hdr.
test_hdr_extension
Esegue il test dell'estensione HDR. Acquisisce immagini con e senza l'estensione abilitata e verifica se l'estensione rende il codice QR più rilevabile.
API testate:
android.hardware.camera2.CameraExtensionCharacteristics#getSupportedExtensionsandroid.hardware.camera2.CameraExtensionSession#capture
Passaggio:l'estensione HDR riduce il numero di modifiche del contrasto necessarie per rilevare il codice QR o riduce il gradiente nel codice QR.
scene_low_light
La scena scene_low_light è costituita da una griglia di quadrati di varie tonalità di
grigio su uno sfondo nero e la griglia di quadrati è delimitata da un contorno
rosso. I quadrati sono disposti secondo l'orientamento della curva di Hilbert.
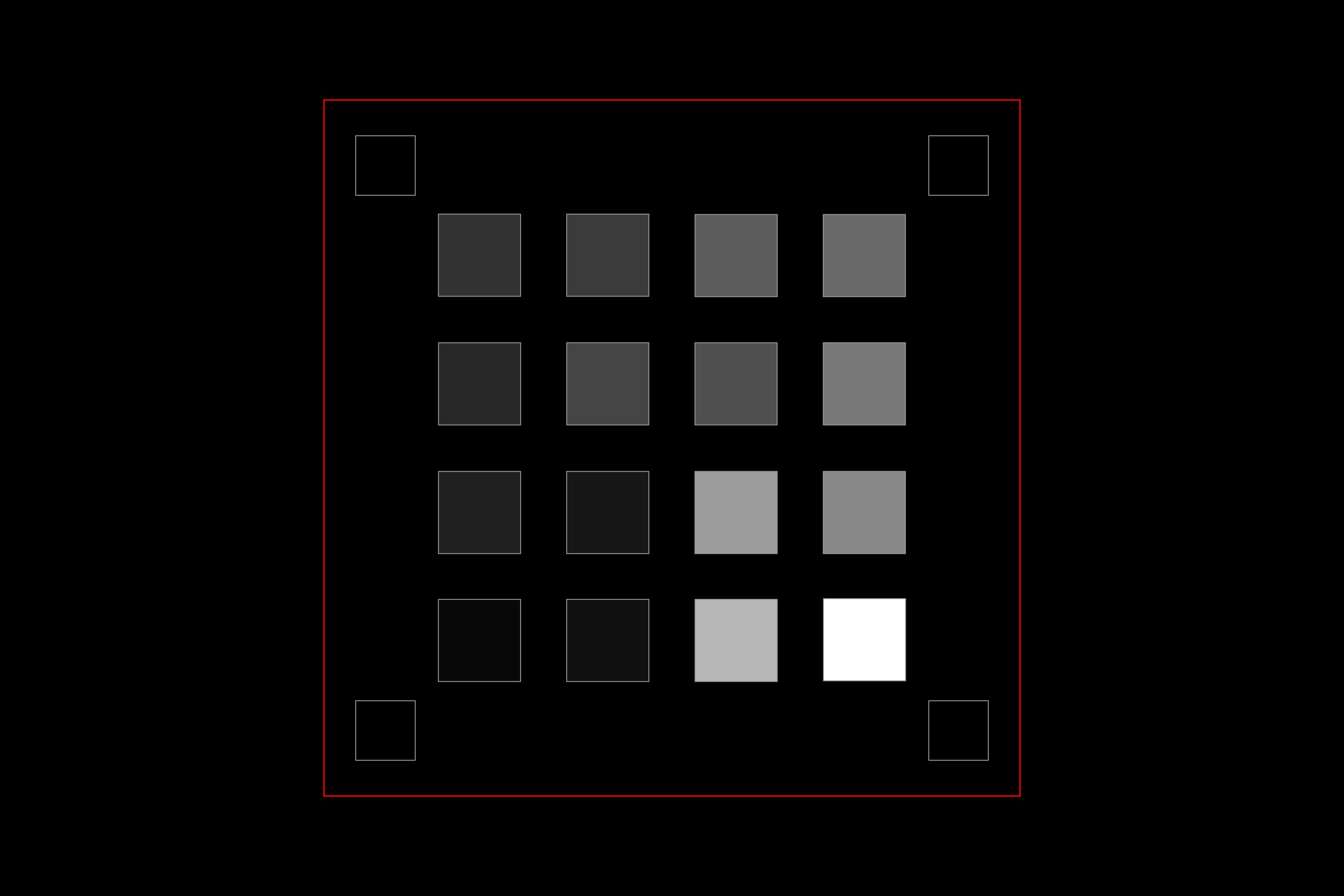
Figura 141. Esempio di scene_low_light.
test_night_extension
Testa l'estensione Night. Acquisisce le acquisizioni con l'estensione abilitata ed esegue le seguenti operazioni:
- Rileva la presenza di 20 quadrati
- Calcola la luminanza delimitata da ogni quadrato
- Calcola il valore di luminanza medio dei primi 6 quadrati in base all'orientamento della griglia della curva di Hilbert
- Calcola la differenza nel valore di luminanza di quadrati consecutivi (ad esempio, quadrato2 - quadrato1) fino ai quadrati 5 e 6 (quadrato6 - quadrato5) e trova la media delle cinque differenze calcolate.
Per i dispositivi con Android 16 o versioni successive, la richiesta di acquisizione include una regione misurata corrispondente al rettangolo che delimita la griglia di quadrati. Questa aggiunta modifica i criteri di superamento della soglia.
API testate:
android.hardware.camera2.CameraExtensionCharacteristics#getSupportedExtensionsandroid.hardware.camera2.CameraExtensionSession#capture
Pass:
- Per i dispositivi con Android 16 o versioni successive, il valore di luminanza medio dei primi 6 quadrati deve essere almeno 80 e la differenza media nel valore di luminanza dei quadrati consecutivi fino ai quadrati 5 e 6 deve essere almeno 18, 75.
- Per i dispositivi con Android 15 e versioni precedenti, il valore medio di luminanza dei primi 6 quadrati deve essere almeno 85 e la differenza media nel valore di luminanza dei quadrati consecutivi fino ai quadrati 5 e 6 deve essere almeno 17.
Il seguente grafico della luminanza mostra l'aspetto di un risultato del test superato.
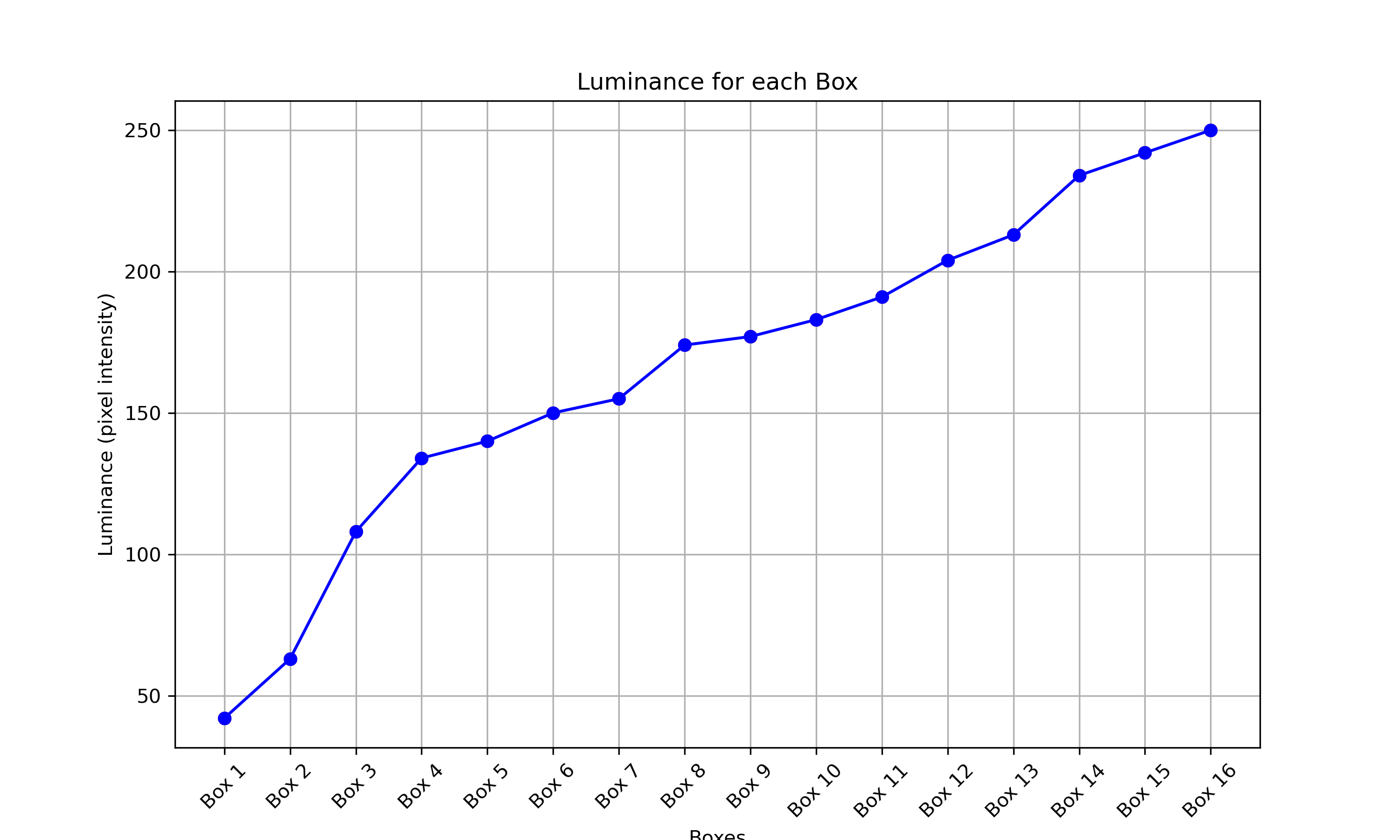
Figura 142. Esempio di test superato per una scena notturna in condizioni di scarsa illuminazione.
test_low_light_boost_extension
Esegue il test della modalità AE Aumento luce. Se Camera2 supporta la modalità AE Low Light Boost, questo test viene eseguito per Camera2. Se l'estensione della modalità notturna è supportata e supporta la modalità AE Low Light Boost, questo test viene eseguito anche per l'estensione della modalità notturna. Questo test imposta la modalità AE su potenziamento in condizioni di scarsa illuminazione, acquisisce un frame dall'anteprima ed esegue le seguenti operazioni:
- Rileva la presenza di 20 scatole
- Calcola la luminanza delimitata da ogni riquadro
- Calcola il valore di luminanza medio dei primi 6 quadrati in base all'orientamento della griglia della curva di Hilbert
- Calcola la differenza nel valore di luminanza di quadrati consecutivi (ad esempio, quadrato2 - quadrato1) fino ai quadrati 5 e 6 (quadrato6 - quadrato5) e trova la media delle cinque differenze calcolate.
Per i dispositivi con Android 16 o versioni successive, la richiesta di acquisizione include una regione misurata corrispondente al rettangolo che delimita la griglia di quadrati. Questa aggiunta modifica i criteri di superamento della soglia.
API testate:
android.hardware.camera2.CameraCharacteristics.CONTROL_AE_AVAILABLE_MODESandroid.hardware.camera2.CameraMetadata#CONTROL_AE_MODE_ON_LOW_LIGHT_BOOST_BRIGHTNESS_PRIORITYandroid.hardware.camera2.CameraExtensionCharacteristics#getSupportedExtensions
Pass:
Per i dispositivi con Android 16 o versioni successive, il valore di luminanza medio dei primi 6 quadrati deve essere almeno 54 e la differenza media nel valore di luminanza dei quadrati consecutivi fino ai quadrati 5 e 6 deve essere almeno 17.
Per i dispositivi con Android 15 e versioni precedenti, il valore medio di luminanza dei primi 6 quadrati deve essere almeno 70 e la differenza media nel valore di luminanza dei quadrati consecutivi fino ai quadrati 5 e 6 deve essere almeno 18.
scene_tele
Un requisito fondamentale per i test scene_tele è che la distanza del grafico deve essere almeno la distanza minima di messa a fuoco del teleobiettivo. Poiché questa distanza minima di messa a fuoco
può variare a seconda del dispositivo, devi configurare la configurazione
in base alla telecamera teleobiettivo specifica.
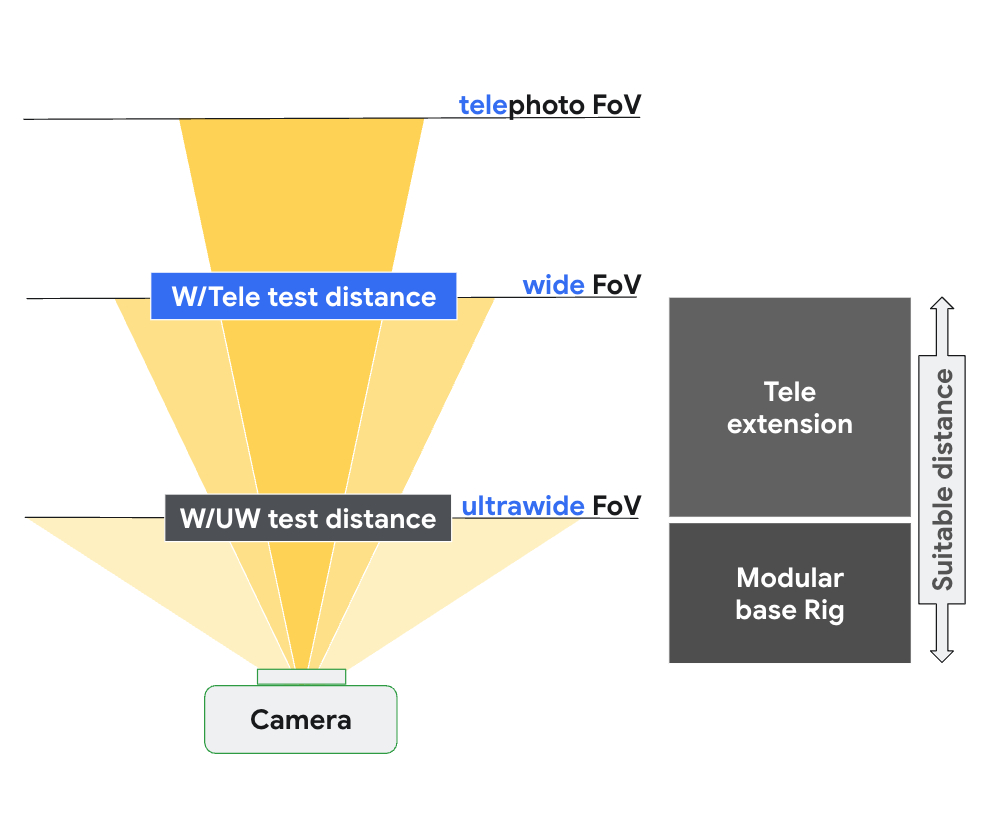
Figura 143. Configurazione di scene_tele in base alla distanza di messa a fuoco della videocamera grandangolare e tele.
Per maggiori informazioni sulla configurazione dell'hardware di test, vedi Configurazione del rig di estensione del teleobiettivo.
scene6_tele
La scena scene6_tele è costituita da una griglia di marcatori ArUco su uno sfondo bianco.
Se le acquisizioni scene6_tele appaiono sovraesposte nel
rig modulare, rimuovi la
piastra anteriore del
rig modulare.
Scollega il banco di prova WFoV dalla prolunga e rimuovi il supporto per lo smartphone.

Figura 144. Scollega il banco di prova WFoV dalla prolunga e rimuovi il supporto per lo smartphone.

Figura 145. Rimuovi la piastra anteriore.
test_zoom_tele
Esegue il test del comportamento dello zoom della fotocamera dall'obiettivo grandangolare al teleobiettivo. Il test è identico a test_zoom, ma verifica il comportamento dello zoom della fotocamera dall'obiettivo grandangolare al teleobiettivo.
API testate:
android.hardware.camera2.CameraCharacteristics#CONTROL_ZOOM_RATIO_RANGEandroid.hardware.camera2.CameraCharacteristics#LENS_INFO_AVAILABLE_FOCAL_LENGTHSandroid.hardware.camera2.CaptureRequest#CONTROL_ZOOM_RATIOandroid.hardware.camera2.CaptureResult#LENS_FOCAL_LENGTH
Superato:le dimensioni relative del marcatore ArUco acquisito sono accurate rispetto al rapporto di zoom richiesto per verificare che la videocamera esegua lo zoom correttamente e la distanza del marcatore dal centro dell'immagine cambia in base ai criteri elencati in test_zoom.
test_preview_zoom_tele
Esegue il test del comportamento dello zoom della videocamera per i frame di anteprima dall'obiettivo grandangolare al
teleobiettivo. Il test è identico a
test_preview_zoom, ma verifica il comportamento
dello zoom della fotocamera per i frame di anteprima dall'obiettivo grandangolare al teleobiettivo.
API testate:
android.hardware.camera2.CameraCharacteristics#CONTROL_ZOOM_RATIO_RANGEandroid.hardware.camera2.CameraCharacteristics#LENS_INFO_AVAILABLE_FOCAL_LENGTHSandroid.hardware.camera2.CaptureRequest#CONTROL_ZOOM_RATIOandroid.hardware.camera2.CaptureResult#LENS_FOCAL_LENGTH
Superato:le dimensioni relative del marcatore ArUco acquisito sono accurate rispetto al rapporto di zoom richiesto per verificare che la videocamera esegua lo zoom correttamente e la distanza del marcatore dal centro dell'immagine cambia in base ai criteri elencati in test_preview_zoom.
scene7_tele
scene7_tele è identico a scene7, ma configurato per il test del teleobiettivo. Si tratta di una cornice rettangolare divisa in quattro quadranti uguali, ciascuno riempito
con un colore diverso. Al centro del rettangolo si trova un grafico con bordo inclinato
per i controlli della nitidezza. Quattro marker ArUco sono allineati ai quattro angoli esterni
del rettangolo per facilitare l'ottenimento di coordinate accurate del frame
rettangolare principale a diversi rapporti di zoom.
test_multi_camera_switch_tele
Questo test verifica che durante la registrazione dell'anteprima a diversi rapporti di zoom, il passaggio tra gli obiettivi grandangolare (W) e teleobiettivo (tele) produca valori RGB simili.
Il test utilizza diversi rapporti di zoom all'interno dell'intervallo predefinito per eseguire una registrazione di anteprima dinamica e identificare il punto in cui la fotocamera fisica cambia. Questo punto segna il passaggio dall'obiettivo W al teleobiettivo.
I frame acquisiti in corrispondenza e prima del punto di crossover vengono analizzati per AE, AWB e AF.
Il controllo AE verifica che la variazione di luminanza rientri nell'intervallo previsto per le immagini dell'obiettivo W e di quello tele. Il controllo AWB verifica che i rapporti tra rosso-verde e blu-verde rientrino nei valori di soglia per le immagini dell'obiettivo W e tele. Il controllo AF valuta il valore di stima della nitidezza in base alla magnitudo media del gradiente tra le immagini dell'obiettivo grandangolare e di quello teleobiettivo.
API testate:
android.hardware.camera2.CameraCharacteristics#CONTROL_ZOOM_RATIO_RANGEandroid.hardware.camera2.CaptureRequest#CONTROL_ZOOM_RATIOandroid.media.CamcorderProfileandroid.media.MediaRecorder
Superato:per superare il test, devono essere superati tutti i controlli AE, AWB e AF. Di seguito sono riportati i criteri per ogni controllo:
- Controllo AE: la variazione di luminanza tra le immagini dell'obiettivo grandangolare e di quello tele deve essere inferiore al 4%.
- Controllo AWB: nello spazio colore LAB, il delta C tra rosso-verde e blu-verde per grandangolo e teleobiettivo non può superare 10.
- Controllo AF: la nitidezza dell'immagine del teleobiettivo deve essere superiore a quella dell'obiettivo W.
scene_flash
I test scene_flash richiedono una scena buia nella casella di fusione dei sensori.
In Android 17 e versioni successive, i test scene_flash
possono essere eseguiti utilizzando
il rig Gen2.
test_auto_flash
Test che attivano il flash automatico in una scena buia per le fotocamere posteriori e anteriori. Per le fotocamere frontali, il flash automatico utilizza lo schermo per illuminare la scena, non un flash fisico. Il test verifica che il flash automatico venga attivato controllando che il centro dell'immagine del riquadro sia più luminoso con il flash automatico attivato. Per attivare il flash automatico, le luci del banco di prova devono essere spente. Le luci possono essere spente automaticamente con il controller Arduino. La scena deve essere completamente buia affinché il test funzioni correttamente. L'app Jetpack Camera (JCA) deve essere installata sul dispositivo prima del test. Il flash automatico per le fotocamere posteriori si basa sull'attivazione dello stato AE, mentre il flash automatico per le fotocamere anteriori non si basa sull'AE e viene sempre attivato.
In Android 17 e versioni successive, esegue test sui livelli di zoom non 1x per verificare la corretta funzionalità in tutti gli intervalli di zoom supportati.
API testate:
android.hardware.camera2.CameraCharacteristics#FLASH_INFO_AVAILABLEandroid.hardware.camera2.CaptureRequest#CONTROL_AE_MODEandroid.hardware.camera2.CaptureRequest#CONTROL_AE_PRECAPTURE_TRIGGERandroid.hardware.camera2.CaptureResult#CONTROL_AE_STATEandroid.hardware.camera2.CaptureRequest#FLASH_MODE
Superato:il centro dell'immagine della tessera con il flash automatico attivato è più luminoso dell'immagine della scena originale per tutte le videocamere.
test_flash_strength
Test che controllano che la regolazione dell'intensità del flash in modalità
SINGLE
sia implementata correttamente.
Verifica che se il dispositivo supporta il controllo dell'intensità del flash durante l'uso della videocamera
in modalità SINGLE, l'intensità del flash cambi con i diversi livelli di intensità richiesti. Verifica che il controllo dell'intensità del flash funzioni con diversi
AE_MODES.
Ad esempio, se la modalità di esposizione automatica è ON o OFF, il livello di intensità del flash influisce sulla luminosità, mentre se la modalità è ON_AUTO_FLASH, il livello di intensità del flash non influisce sulla luminosità.
Per eseguire il test, le luci del banco di prova devono essere spente. Le luci possono essere spente automaticamente con il controller Arduino. Affinché il test funzioni correttamente, la scena deve essere completamente buia.
API testate:
android.hardware.camera2.CameraCharacteristics#FLASH_INFO_STRENGTH_DEFAULT_LEVELandroid.hardware.camera2.CameraCharacteristics#FLASH_INFO_STRENGTH_MAXIMUM_LEVELandroid.hardware.camera2.CameraCharacteristics#FLASH_SINGLE_STRENGTH_DEFAULT_LEVELandroid.hardware.camera2.CameraCharacteristics#FLASH_SINGLE_STRENGTH_MAX_LEVEL
Pass:
Quando la modalità di esposizione automatica è ON o OFF, la luminosità delle patch dell'immagine aumenta man mano che il livello di intensità del flash aumenta da nessun flash a FLASH_SINGLE_STRENGTH_MAX_LEVEL.
Quando la modalità di esposizione automatica è ON_AUTO_FLASH, la differenza di luminosità delle
patch dell'immagine rientra nella tolleranza man mano che il livello di intensità del flash aumenta da
nessun flash a FLASH_SINGLE_STRENGTH_MAX_LEVEL.
test_led_snapshot
Verifica che gli snapshot LED non saturino o colorino l'immagine.
Questo test aggiunge un controller di illuminazione alla scatola di fusione dei sensori per
controllare le luci. Con le luci impostate su OFF, il test acquisisce un'immagine con la modalità AUTO_FLASH impostata su ON. Durante questa acquisizione, il test esegue una
sequenza di preacquisizione con il trigger aePrecapture impostato su START e imposta
l'intento di acquisizione su Preview per acquisire con il flash.
Poiché l'acquisizione ha un hotspot distintivo dovuto al flash, il test calcola la media dell'immagine del flash dell'intera acquisizione e verifica se il valore rientra nell'intervallo (68, 102). Per verificare se il bilanciamento del bianco dell'immagine è ragionevole, il test calcola i rapporti rosso-verde e blu-verde e verifica se i rapporti sono compresi tra 0,95 e 1,05.
API testate:
android.hardware.camera2.CameraCharacteristics#FLASH_INFO_AVAILABLEandroid.hardware.camera2.CaptureRequest#CONTROL_AE_MODEandroid.hardware.camera2.CaptureRequest#FLASH_MODE
Superato:i rapporti rosso-verde e blu-verde sono compresi tra 0,95 e 1,05. La media dell'immagine del flash rientra nell'intervallo (68, 102).
test_night_mode_indicator
Verifica la funzionalità dell'indicatore della modalità notturna, una funzionalità che indica se la videocamera funziona in condizioni di scarsa illuminazione e se trarrà vantaggio da un'acquisizione con l'estensione della modalità notturna. Questa funzionalità è disponibile solo sui dispositivi che supportano le estensioni della fotocamera in modalità Notte.
Questo test verifica che l'indicatore della modalità notturna rifletta correttamente le condizioni di illuminazione durante l'anteprima della videocamera. Il test esegue i seguenti passaggi:
- Inizializzazione:il test inizializza un
ItsSessione recupera le proprietà della videocamera. Stabilisce inoltre una connessione con il controller dell'illuminazione. - Condizioni di ignoramento:il test viene ignorato se il dispositivo non supporta il livello API richiesto o la funzionalità di indicatore della modalità notturna.
- Sessione Camera2:
- Il test avvia una sessione di acquisizione dell'anteprima utilizzando una sessione
Camera2. - La luce si accende e viene acquisito un frame di anteprima.
- Il test verifica che l'indicatore della modalità notturna sia nello stato
OFF. - La luce viene spenta e viene acquisito un frame di anteprima.
- Il test verifica che l'indicatore della modalità notturna sia nello stato
ON.
- Il test avvia una sessione di acquisizione dell'anteprima utilizzando una sessione
- Sessione di estensione della videocamera:
- Il test ripete la stessa procedura della sessione
Camera2, ma utilizzando una sessioneCameraExtensioncon l'estensioneEXTENSION_NIGHT.
- Il test ripete la stessa procedura della sessione
- Pulizia:il test si chiude
ItsSessione rilascia il controller dell'illuminazione.
API testate:
Pass:
- Quando la spia è accesa, l'indicatore della modalità notturna deve essere nello stato
OFF. - Quando la spia è spenta, l'indicatore della modalità notturna deve essere nello stato
ON. - Si applica sia alle sessioni
Camera2sia a quelleCameraExtension.
test_preview_min_frame_rate
Test che verificano che la frequenza fotogrammi dell'anteprima diminuisca correttamente in una scena buia. Affinché questo test funzioni correttamente, le luci del banco di prova devono essere spente dal controller o manualmente dall'operatore del test.
API testate:
android.hardware.camera2.CameraCharacteristics#CONTROL_AE_AVAILABLE_TARGET_FPS_RANGESandroid.hardware.camera2.CameraCharacteristics#SCALAR_AVAILABLE_CAPABILITIES_STREAM_USE_CASESandroid.hardware.camera2.CaptureResult#CONTROL_AE_TARGET_FPS_RANGEandroid.media.CamcorderProfileandroid.media.MediaRecorder
Superato:la frequenza fotogrammi dell'anteprima è al minimo dell'intervallo di frequenza fotogrammi richiesto e la variazione tra i fotogrammi è inferiore alla tolleranza assoluta impostata nel test.
test_torch_strength
Test che controllano che la regolazione dell'intensità del flash in modalità
TORCH
sia implementata correttamente.
Verifica che se il dispositivo supporta il controllo dell'intensità del flash durante l'utilizzo della fotocamera
in modalità TORCH, l'intensità della torcia cambi con i diversi livelli di intensità
richiesti. Verifica che il controllo dell'intensità del flash funzioni con diversi
AE_MODES.
Ad esempio, se la modalità di esposizione automatica è ON o OFF, il livello di intensità del flash influisce sulla luminosità, mentre se la modalità è ON_AUTO_FLASH, il livello di intensità del flash non influisce sulla luminosità.
Verifica che l'intensità della torcia rimanga invariata per tutta la durata di una
raffica, simulando una sessione di acquisizione video. Per eseguire il test, le luci del
banco di prova devono essere spente. Le luci possono essere spente automaticamente con il
controller Arduino. La scena deve essere completamente buia affinché il test funzioni
correttamente.
API testate:
android.hardware.camera2.CameraCharacteristics#FLASH_INFO_STRENGTH_DEFAULT_LEVELandroid.hardware.camera2.CameraCharacteristics#FLASH_INFO_STRENGTH_MAXIMUM_LEVELandroid.hardware.camera2.CameraCharacteristics#FLASH_TORCH_STRENGTH_DEFAULT_LEVELandroid.hardware.camera2.CameraCharacteristics#FLASH_TORCH_STRENGTH_MAX_LEVEL
Pass:
Quando la modalità di esposizione automatica è ON o OFF, la luminosità delle patch di scatto a raffica dell'immagine aumenta man mano che il livello di intensità del flash aumenta da nessun flash a FLASH_TORCH_STRENGTH_MAX_LEVEL.
Quando la modalità di esposizione automatica è ON_AUTO_FLASH, la differenza di
luminosità delle patch di scatto a raffica dell'immagine rientra nella tolleranza
man mano che il livello di intensità del flash aumenta da nessun flash a
FLASH_TORCH_STRENGTH_MAX_LEVEL.
scene_gen2_chart
In Android 17 e versioni successive, scene_gen2_chart utilizza la
carta nautica Gen2.
Questa tabella di prova è composta da campioni di volti, un codice QR, patch in scala di grigi, una stella Siemens, una tabella dei colori e quadrati inclinati.
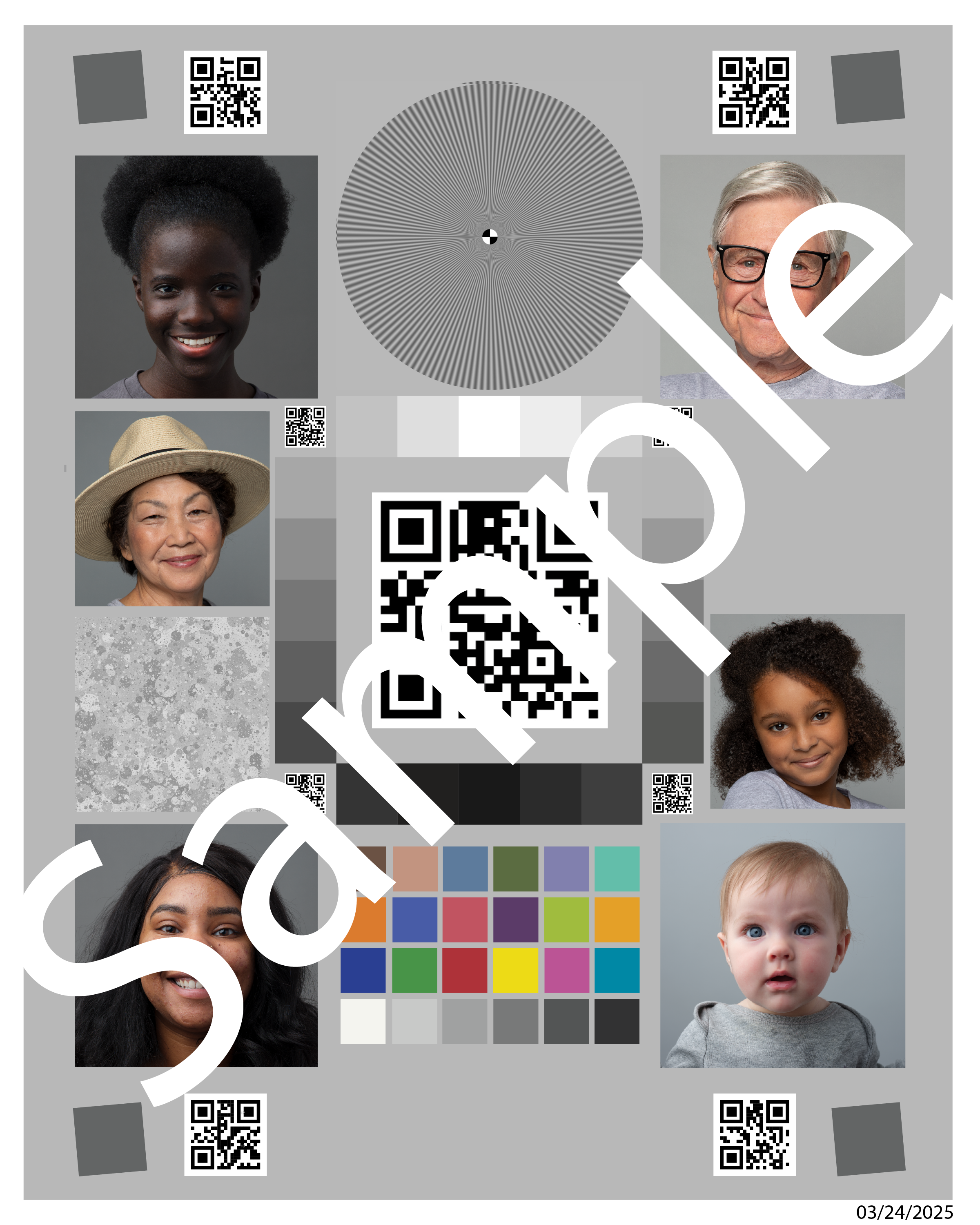
Figura 146. Esempio di campione di grafico di seconda generazione.
test_tonemap_sequence
Questo test valuta la curva di mappatura della tonalità predefinita di un dispositivo rispetto a una curva lineare e a due curve esponenziali (una con punti uniformi e l'altra con punti non uniformi). Per un risultato positivo, la luminosità della curva predefinita deve superare quella delle curve lineare ed esponenziale. Inoltre, la curva lineare deve essere più luminosa delle curve esponenziali e le due curve esponenziali devono avere livelli di luminosità simili.
Il test verifica anche l'accuratezza della curva predefinita del dispositivo. Questa operazione viene eseguita estraendo la curva predefinita, reinserendola e confrontando la luminosità dell'immagine risultante con quella dell'immagine della curva predefinita originale.

Figura 147. Grafico della sequenza di mappatura del tono di prova.
API testate:
android.hardware.camera2.CameraMetadata#TONEMAP_MODE_CONTRAST_MODEandroid.hardware.camera2.CameraMetadata#TONEMAP_MODE_FASTandroid.hardware.camera2.CaptureRequest#TONEMAP_CURVEandroid.hardware.camera2.CaptureRequest#TONEMAP_MODE
Superato:la differenza di luminosità tra le curve predefinita e lineare è superiore al 15%, mentre la differenza tra le due curve esponenziali è inferiore all'8%.
test_multi_camera_switch
Questo test verifica la coerenza di colore ed esposizione durante le transizioni di zoom dinamico. Verifica che il passaggio tra gli obiettivi Ultrawide (UW) e Wide (W) durante la registrazione dell'anteprima mantenga valori CIELAB quasi identici, evitando variazioni visibili nell'esperienza utente.
Il test esegue una registrazione dell'anteprima dinamica in un intervallo di zoom predefinito per attivare il punto di "crossover" della fotocamera fisica, in cui l'obiettivo ultrawide passa all'obiettivo grandangolare. Il test identifica il frame esatto in cui avviene il cambio di obiettivo. I frame immediatamente precedenti e successivi a questo punto di crossover vengono acquisiti e analizzati per la stabilità nell'esposizione automatica (AE) e nel bilanciamento del bianco automatico (AWB).
Il controllo AE conferma che le fluttuazioni di luminanza rimangono entro un intervallo accettabile durante il passaggio dell'obiettivo. Il controllo del bilanciamento del bianco verifica che i rapporti rosso-verde e blu-verde rimangano entro le soglie definite di neutralità del colore.
API testate:
android.hardware.camera2.CameraCharacteristics#CONTROL_ZOOM_RATIO_RANGEandroid.hardware.camera2.CaptureRequest#CONTROL_ZOOM_RATIOandroid.media.CamcorderProfileandroid.media.MediaRecorder
Superato:affinché il test venga superato, devono essere superati i seguenti controlli AE e AWB:
- Controllo AE: la variazione di luminanza (valore Y) tra le immagini dell'obiettivo UW e W deve
essere inferiore al 4% per tutte le patch di colore se il dispositivo supporta sia
ae_regionscheawb_regions. Se è supportato soloae_regions, solo i valori della patch di colore grigio devono soddisfare i criteri. - Controllo AWB: la differenza tra i valori rosso-verde e blu-verde per le immagini degli obiettivi UW e W deve essere inferiore al 3% per la patch di colore grigio e inferiore al 10% per le altre patch di colore se il dispositivo supporta sia
ae_regionssiaawb_regions.

Figura 148. Patch grigio scattato con l'obiettivo UW.

Figura 149. Patch grigio scattata con l'obiettivo W.
scene_wide_gamut
scene_wide_gamut è una cornice rettangolare divisa in quattro quadranti uguali,
ciascuno riempito con un colore diverso. Per questo, il tablet deve visualizzare il
grafico in un'ampia gamma e il DUT deve acquisire una fotografia
dello schermo in un'ampia gamma.
Questi test verificano che l'immagine acquisita rispetti il profilo e la gamma di colori corretti.
test_display_p3
I test Display P3 vengono acquisiti in formato JPEG utilizzando l'API ColorSpaceProfiles. Test
che verificano che il JPEG acquisito abbia un profilo ICC appropriato nell'intestazione e
che l'immagine contenga una determinata percentuale di colori al di fuori della gamma sRGB.
API testate:
android.hardware.camera2.params.ColorSpaceProfilesandroid.hardware.camera2.params.SessionConfiguration#setColorSpace
Superato:il JPEG contiene un profilo ICC Display P3 e più dell'1% di colori al di fuori della gamma sRGB.

Figura 150. Esempio di test_display_p3.
sensor_fusion
I test di fusione dei sensori richiedono movimenti specifici dello smartphone davanti a un motivo a scacchiera
e a marcatori ArUco. Per risultati ottimali, verifica che la tabella di test sia
montata in piano. I grafici non piatti influiscono sui calcoli della rotazione per molti
dei test. Il grafico deve riempire il retro della scatola di fusione dei sensori stampando
a 17 x 17 pollici. (43x43 cm). I test sensor_fusion possono essere automatizzati
con la scatola di fusione dei sensori.
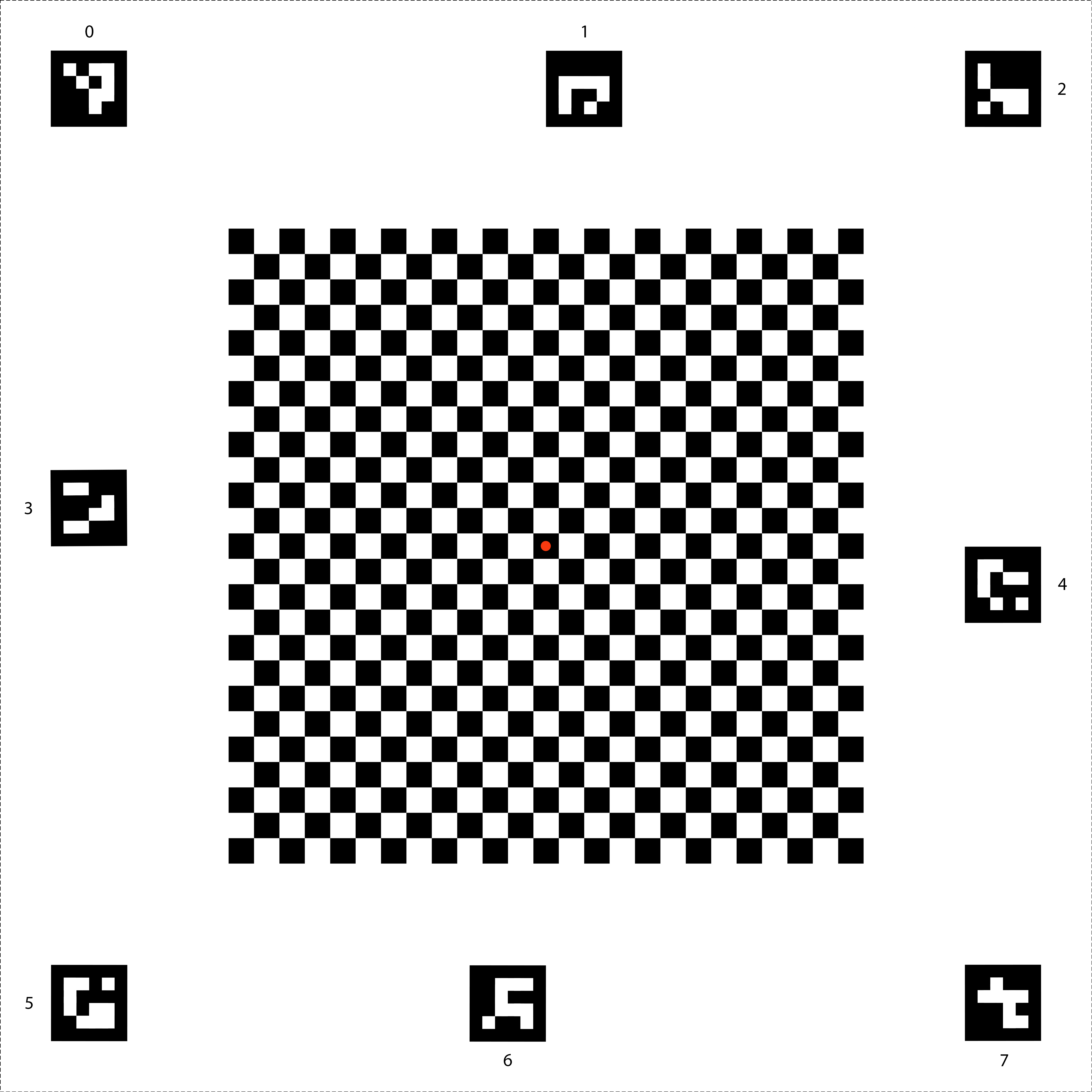
Figura 151. Grafico di fusione dei sensori.
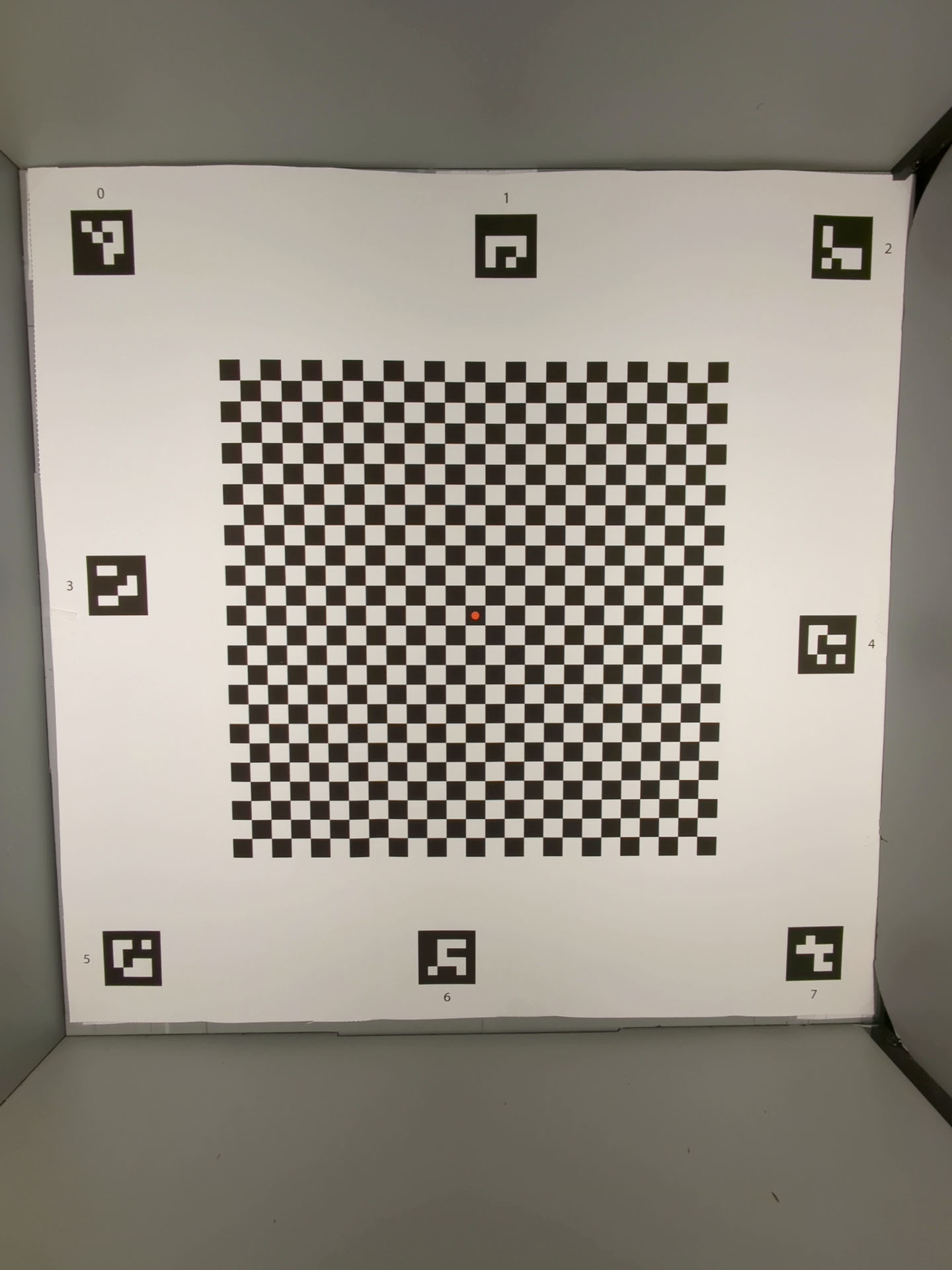
Figura 152. Grafico della fusione dei sensori che riempie la parte posteriore della casella della fusione dei sensori.
test_lens_intrinsic_calibration
Test che verifica che il centro ottico delle modifiche intrinseche dell'obiettivo quando l'obiettivo si sposta a causa della stabilizzazione ottica dell'immagine (OIS). Se sono supportati campioni intrinseci dell'obiettivo, i test che il centro ottico dei campioni intrinseci dell'obiettivo cambia quando l'obiettivo si sposta a causa della stabilizzazione ottica dell'immagine.
API testate:
android.hardware.camera2.CameraCharacteristics#LENS_INTRINSIC_CALIBRATIONandroid.media.MediaRecorderandroid.media.CamcorderProfile
Passaggio:il centro ottico delle modifiche intrinseche dell'obiettivo di 1 pixel o più. Se sono supportati campioni intrinseci dell'obiettivo, i centri ottici dei campioni intrinseci dell'obiettivo cambiano di 1 pixel o più.
La figura seguente è un esempio di grafico test_lens_intrinsic_calibration che mostra le variazioni dei punti principali in pixel per ogni frame:
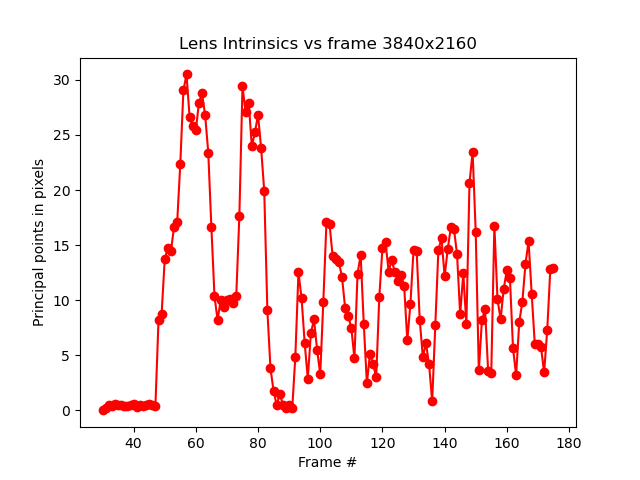
Figura 153. Esempio di grafico test_lens_intrinsic_calibration che mostra le variazioni dei punti principali in pixel per ogni frame.
test_multi_camera_frame_sync
Test che inquadrano i timestamp acquisiti dalla videocamera logica entro 10 ms calcolando gli angoli dei quadrati all'interno della scacchiera per determinare il timestamp.
API testate:
android.hardware.camera2.CameraCharacteristics#LOGICAL_MULTI_CAMERA_SENSOR_SYNC_TYPEandroid.hardware.camera2.CameraCharacteristics#getPhysicalCameraIds()android.hardware.camera2.CameraMetadata#REQUEST_AVAILABLE_CAPABILITIES_LOGICAL_MULTI_CAMERAandroid.hardware.camera2.params.OutputConfiguration#setPhysicalCameraId()
Superato:l'angolo tra le immagini di ogni fotocamera non cambia in modo significativo quando lo smartphone viene ruotato.
test_preview_distortion
Test che verificano che la distorsione venga corretta in ogni frame di anteprima acquisito a vari livelli di zoom. Per ogni frame di anteprima, il test calcola i punti ideali in base ai parametri intrinseci ed estrinseci della videocamera.
Nell'immagine di esempio, i punti ideali sono mostrati in verde, mentre i punti effettivi sono mostrati in rosso. L'errore di distorsione viene calcolato in base alla distanza RMS in pixel tra i punti effettivi e quelli ideali. I colori verde e rosso evidenziati nell'immagine vengono utilizzati per rilevare visivamente l'area dell'errore di distorsione.
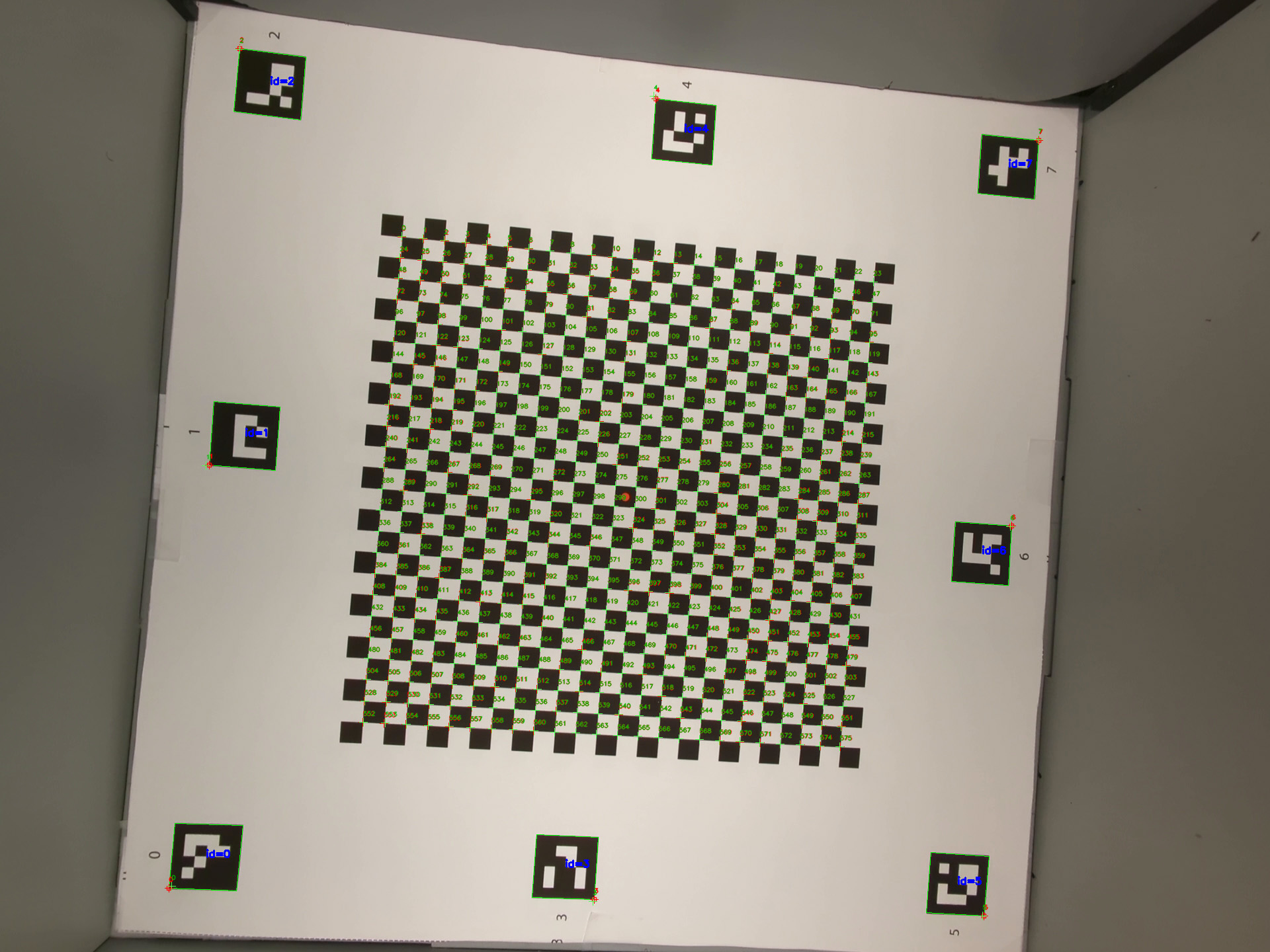
Figura 154. Immagine di una scacchiera con i punti ideali in verde e i punti effettivi in rosso.
API testate:
android.hardware.camera2.CameraCharacteristics#CONTROL_ZOOM_RATIO_RANGEandroid.hardware.camera2.CaptureRequest#CONTROL_ZOOM_RATIOandroid.hardware.camera2.CameraCharacteristics#getPhysicalCameraIds()android.media.CamcorderProfileandroid.media.MediaRecorder
Superato:l'errore di distorsione normalizzato di ogni frame di anteprima è inferiore alla soglia impostata nel test.
test_preview_stabilization
Test che stabilizzano l'anteprima video ruotano meno del giroscopio.
API testate:
android.hardware.camera2.CameraCharacteristics#SCALAR_AVAILABLE_CAPABILITIES_STREAM_USE_CASESandroid.media.MediaRecorderandroid.media.CamcorderProfile
Superato:la rotazione angolare massima sui frame è inferiore al 70% della rotazione del giroscopio.
Di seguito sono riportati alcuni video di esempio con e senza stabilizzazione:
Figura 155. Video di esempio con stabilizzazione.
Figura 156. Video di esempio senza stabilizzazione.
test_sensor_fusion
Verifica la differenza di timestamp tra la videocamera e il giroscopio per le applicazioni AR
e VR. Lo smartphone viene ruotato di 90 gradi 10 volte davanti
al motivo a scacchiera. Il movimento è di circa 2 secondi andata e ritorno. Questo
test viene ignorato se non è incluso alcun giroscopio o se il parametro
REALTIME di origine del timestamp non è attivato.
Il test test_sensor_fusion genera una serie di grafici. I due grafici più
importanti per il debug sono:
test_sensor_fusion_gyro_events: Mostra gli eventi del giroscopio per lo smartphone durante il test. Il movimento nelle direzioni x e y indica che lo smartphone non è montato in modo sicuro sulla piastra di montaggio, riducendo la probabilità che il test venga superato. Il numero di cicli nel grafico dipende dalla velocità di scrittura per il salvataggio dei frame.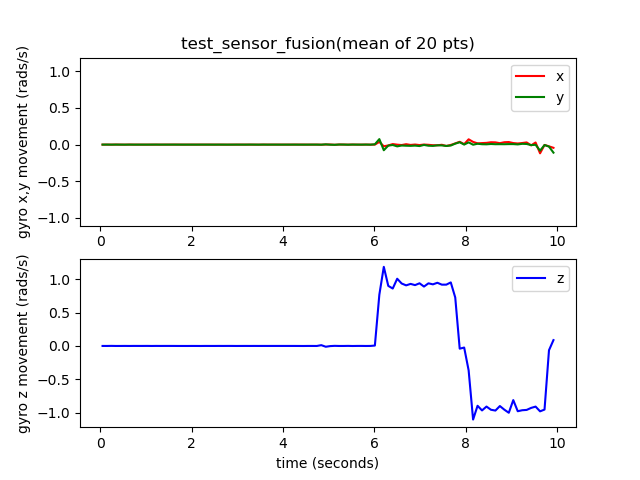
Figura 157. Esempio di eventi del giroscopio test_sensor_fusion.
test_sensor_fusion_plot_rotations: mostra l'allineamento del giroscopio e degli eventi della videocamera. Questo grafico deve mostrare un movimento corrispondente tra la videocamera e il giroscopio con una precisione di +/- 1 ms.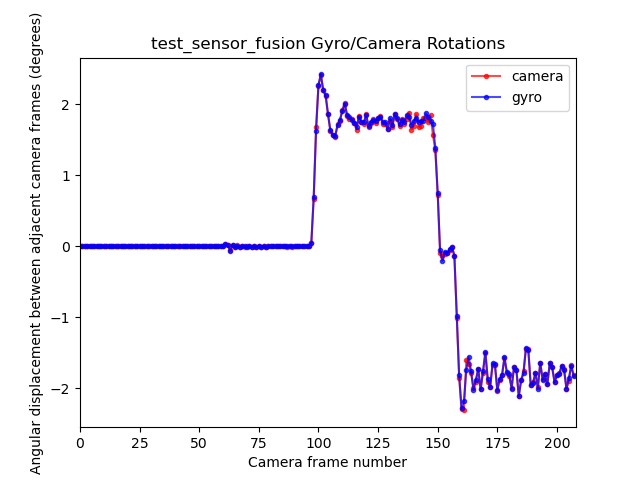
Figura 158. Esempio di rotazioni del grafico test_sensor_fusion.
API testate:
android.hardware.camera2.CameraCharacteristics#LENS_FACINGandroid.hardware.camera2.CameraCharacteristics#SENSOR_INFO_TIMESTAMP_SOURCEandroid.hardware.camera2.CameraMetadata#SENSOR_INFO_TIMESTAMP_SOURCE_REALTIMEandroid.hardware.camera2.CaptureRequest#CONTROL_AE_TARGET_FPS_RANGEandroid.hardware.camera2.CaptureRequest#SENSOR_FRAME_DURATIONandroid.hardware.camera2.CaptureRequest#SENSOR_TIMESTAMPandroid.hardware.camera2.CaptureResult#SENSOR_ROLLING_SHUTTER_SKEW
Superato:l'offset dei timestamp della videocamera e del giroscopio è inferiore a 1 ms come indicato nella sezione 7.3.9 Sensori ad alta fedeltà del CDD.
Meccanismi di errore:
- Errore di offset: l'offset videocamera-giroscopio non è calibrato correttamente entro +/-1 ms.
- Frame persi: la pipeline non è abbastanza veloce per acquisire 200 frame consecutivi.
- Errori di socket:
adbnon riesce a connettersi in modo affidabile al DUT per un periodo di tempo sufficiente a eseguire il test. - Il grafico non è montato in piano. Il grafico
test_sensor_fusion_plot_rotationsha frame in cui la rotazione del giroscopio e della videocamera varia notevolmente man mano che la videocamera ruota attraverso le parti del grafico che non sono piatte. - La videocamera non è montata in piano. Il grafico
test_sensor_fusion_gyro_eventsmostra il movimento nei piani X e Y. Questo guasto è più comune nelle fotocamere anteriori, in quanto la fotocamera posteriore spesso ha un rigonfiamento rispetto al resto del corpo dello smartphone, creando un'inclinazione quando la parte posteriore dello smartphone viene montata sulla piastra di montaggio.
test_video_stabilization
Deprecato: questo test è deprecato a partire da Android 17. Per Android 17 e versioni successive, questo test viene sostituito da test_video_stabilization_jca.
Test in cui il video stabilizzato ruota meno del giroscopio.
API testate:
android.hardware.camera2.CameraCharacteristics#SCALAR_AVAILABLE_CAPABILITIES_STREAM_USE_CASESandroid.media.MediaRecorderandroid.media.CamcorderProfile
Superato:la rotazione angolare massima sui frame è inferiore al 60% della rotazione del giroscopio.
Di seguito sono riportati alcuni video di esempio con e senza stabilizzazione.
Figura 159. Video di esempio con stabilizzazione.
Figura 160. Video di esempio senza stabilizzazione.
test_video_stabilization_jca
I test che stabilizzano il video acquisito utilizzando JCA ruotano meno del giroscopio. Il JCA deve essere installato sul dispositivo prima del test.
API testate:
android.hardware.camera2.CameraCharacteristics#SCALAR_AVAILABLE_CAPABILITIES_STREAM_USE_CASESandroid.media.CamcorderProfileandroid.media.MediaRecorder
Superato: la rotazione angolare massima sui frame estratti dal video acquisito utilizzando il JCA è inferiore al 70% della rotazione del giroscopio.
feature_combination
I test feature_combination verificano che le funzionalità funzionino correttamente quando
più funzionalità della videocamera sono attive contemporaneamente. Questi test utilizzano la stessa
immagine a scacchiera utilizzata nella scena di fusione dei sensori.
test_feature_combination
Esegue il test di tutte le combinazioni di diversi flussi, modalità di stabilizzazione video, intervallo di FPS target, video HDR a 10 bit e Ultra HDR supportati dal dispositivo della videocamera.
Per Android 16 e versioni successive, il test esegue tutte le combinazioni di funzionalità supportate e registra i risultati in un file proto. Le asserzioni di errore
vengono chiamate solo per le combinazioni di funzionalità per le quali
isSessionConfigurationSupported restituisce True.
API testate:
android.hardware.camera2.CameraDevice.CameraDeviceSetup#isSessionConfigurationSupportedandroid.hardware.camera2.CameraDevice.CameraDeviceSetup#createCaptureRequest
Superato:per ogni combinazione di funzionalità supportata:
- Lo stream di anteprima viene stabilizzato se la stabilizzazione dell'anteprima è attiva.
- La frequenza fotogrammi dell'anteprima rientra nel
AE_TARGET_FPS_RANGEconfigurato. - Lo spazio colore dello stream di anteprima registrato corrisponde a quello impostato.
- L'acquisizione Ultra HDR ha una mappa di guadagno valida.
scene_ip
In Android 16 e versioni successive, lo scenario scene_ip consente di eseguire controlli di parità delle immagini tra
l'app Fotocamera predefinita e l'app Fotocamera Jetpack (JCA) per identificare le principali
differenze tra le immagini acquisite. La JCA replica le acquisizioni delle app di social media e fornisce un'immagine di base che le app di social media elaborano e perfezionano.
Requisiti di configurazione dell'hardware
Per i test scene_ip è necessaria la seguente configurazione hardware:
- I test vengono eseguiti nella videocamera Gen2 ITS-in-a-box.
- I controller di illuminazione e servo che fanno parte del rig Gen2 vengono utilizzati per controllare l'ambiente di test.
- All'interno del rig Gen2 è presente un grafico delle funzionalità di test.

Figura 161. Esempio di Gen2chart_sample.
Criteri di ignoramento dei test
I test scene_ip vengono ignorati se viene soddisfatto uno dei seguenti criteri:
- Il dispositivo ha un primo livello API (
first_api_level) pari o inferiore a 35. - Il dispositivo non è uno smartphone con fotocamere principali anteriore e posteriore (ad esempio, un tablet o una TV).
test_default_jca_ip
Acquisisce immagini del grafico della funzionalità di test in condizioni di illuminazione controllata utilizzando l'app Fotocamera predefinita e il JCA ed esegue i seguenti controlli:
FOV: verifica che l'app fotocamera predefinita e le acquisizioni JCA abbiano lo stesso FOV. Questo controllo utilizza la funzionalità del codice QR centrale estratta dall'immagine del grafico delle acquisizioni.
Luminosità:verifica che la differenza di luminosità misurata tra l'app fotocamera predefinita e JCA non superi 10. Questo controllo utilizza la patch dell'intervallo dinamico per la misurazione della luminosità.
Bilanciamento del bianco:verifica che la differenza di bilanciamento del bianco tra l'app fotocamera predefinita e JCA non superi 4. Questo controllo utilizza la patch dell'intervallo dinamico per la misurazione della luminosità.
Resa dei colori:verifica che la differenza di resa dei colori tra l'app fotocamera predefinita e JCA non superi 6.
Superato:il test supera i controlli di campo visivo, luminosità e bilanciamento del bianco. In Android
16, questo test non è obbligatorio (NOT_YET_MANDATED). Per Android
17 e versioni successive, i controlli di parità
di FOV, luminosità e bilanciamento del bianco sono obbligatori. Il controllo della riproduzione dei colori non è obbligatorio
(NOT_YET_MANDATED) in Android 17.
test_jca_jpegr_ip
Verifica che la differenza di bilanciamento del bianco tra l'anteprima JPEG_R JCA e le immagini acquisite non superi 4.
API testate:
Superato:la differenza di bilanciamento del bianco tra l'istantanea di anteprima JCA e l'immagine JPEG_R acquisita rientra nella soglia (il valore predefinito è 4).