
本页介绍了如何购买或组装传感器融合盒。在 CameraITS sensor_fusion 测试和 multi-camera 同步测试中会使用传感器融合盒。它能够提供一致的测试环境,以便衡量 Android 设备上传感器(尤其是相机图像传感器和陀螺仪)的时间戳准确度。传感器融合盒包含多个根据计算机辅助设计 (CAD) 图纸激光切割而成的塑料盒组件,以及一个伺服器控制箱。
您可以购买传感器融合盒,也可以自行制作。
购买传感器融合盒
如需购买传感器融合盒,您最好是选择以下合格的供应商。
Byte Bridge Inc.
美国:1502 Crocker Ave, Hayward, CA 94544-7037
中国:上海市徐汇区中山西路 1600 号宏汇国际广场 A 座 22 层 06-08,邮编:200235
www.bytebt.com
androidpartner@bytebt.com
美国:+1-510-373-8899
中国:+86-400-8866-490JFT CO LTD 捷富通科技有限公司(之前称为 MYWAY DESIGN)
中国大陆:No. 40, Lane 22, Heai Road, Wujing Town, Minhang District, Shanghai, China
中国台湾:4F., No. 163, Fu-Ying Road, XinZhuang District, New Taipei City 242, Taiwan
www.jftcoltd.com
service@jfttec.com or its.sales@jfttec.com
中国大陆:+86-021-64909136
中国台湾:886-2-29089060
制作传感器融合盒
这一部分逐步介绍了如何使用激光切割的丙烯腈·丁二烯·苯乙烯 (ABS) 组件组装传感器融合盒(如图 1 所示):
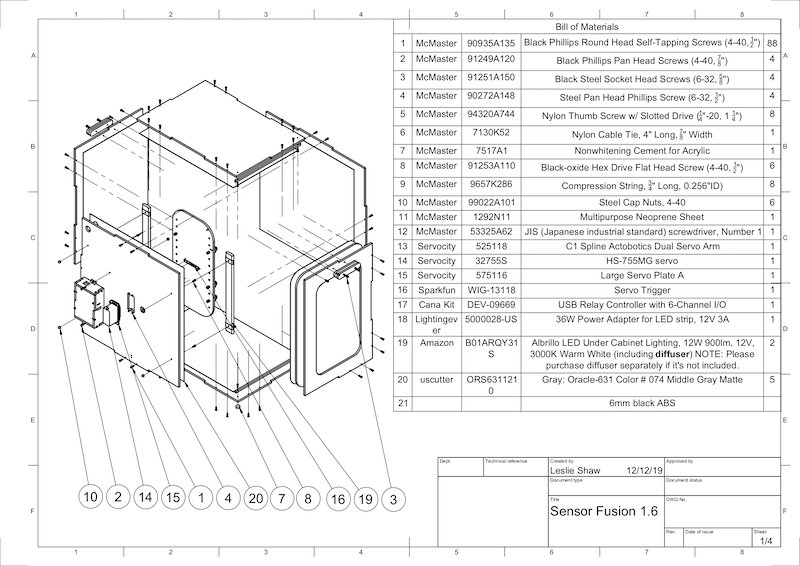
图 1.传感器融合盒组件的机械图纸
所需工具
开始之前,请先确保您已下载传感器融合盒的技术图纸(包含在 Sensor Fusion Box ZIP 文件中),并准备好以下工具:
- 十字头螺丝刀
- JIS 头螺丝刀
- 六角扳手
- 电钻套装
- 美工刀
- 胶带
第 1 步:贴乙烯基贴纸
使用激光切割机制作好 ABS 组件后,在塑料盒上贴上乙烯基贴纸,以便在测试盒内部实现适当的颜色控制:
将乙烯基贴纸贴在 ABS 组件的光滑面上(如图 2 所示)。如需关于如何贴乙烯基贴纸的实用提示,请参阅 wikiHow。
使用美工刀在乙烯基贴纸上裁出必要的孔。
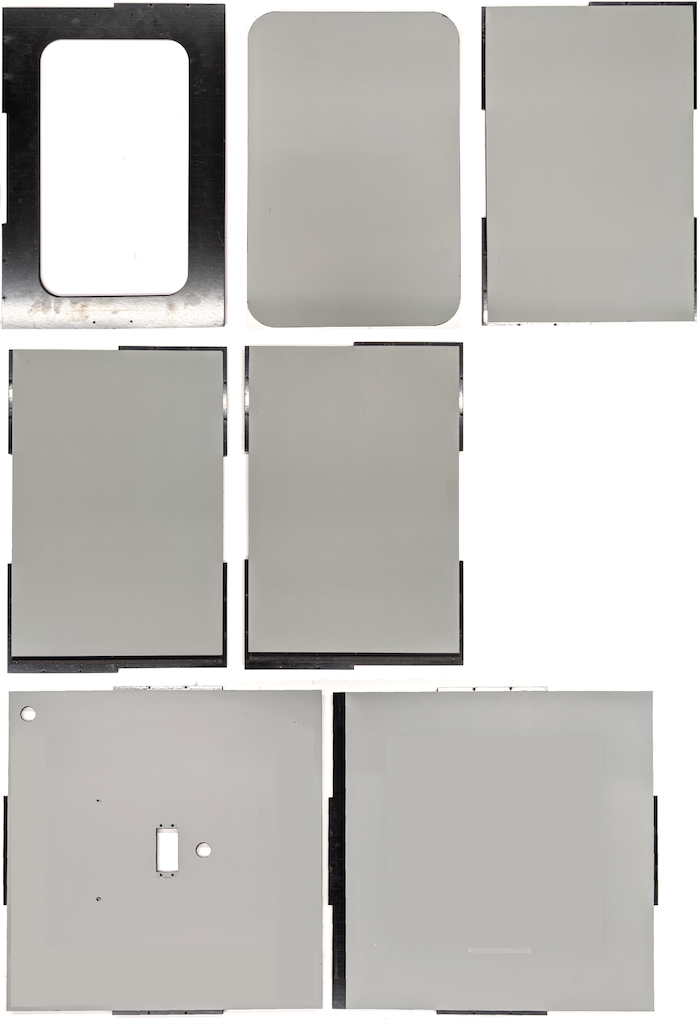
图 2. 在光滑面(盒子内部)贴上了乙烯基膜的 ABS 组件用丙烯酸胶粘剂将圆形 ABS 组件粘到底板四角。
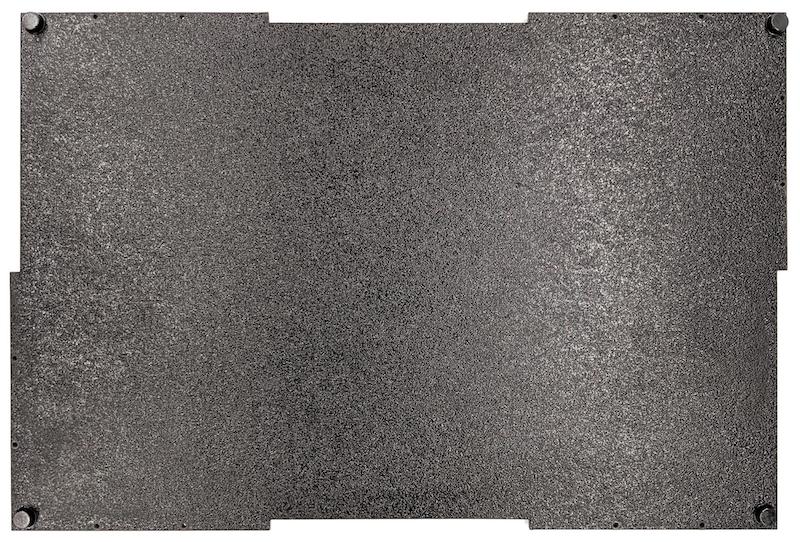
图 3. 四个角粘上了圆形 ABS 组件的底板。
第 2 步:准备手机托架并固定伺服器底座
如要准备手机托架以固定到伺服器上,请执行以下操作:
用一个 1/4"-20 钻头在手机夹上开 20 个孔。
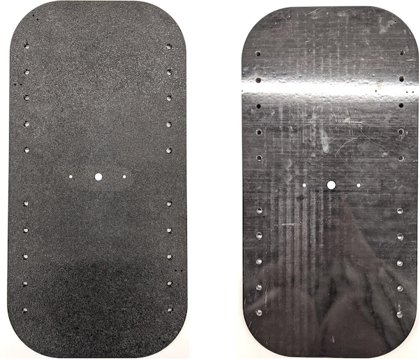
图 4. 开好孔的手机夹准备好 ABS 开孔、尼龙手拧螺钉、尼龙螺母(用来根据需要调整螺钉高度)、C1 齿条 actobotics 双伺服器臂、4-40 螺钉和压缩弹簧。

图 5. 手机托架部件用 4-40 螺钉将伺服器臂固定(1.2 牛顿*米或 8.9 英寸*磅力)到手机托架背面。用 4-40 螺钉和螺母将手机隔板 ABS 开孔固定在手机托架正面。

图 6. 手机夹背面的轴(已用从正面拧入的螺钉紧固)
图 7. 4-40,3/4" 长螺钉和和 4-40 螺母
图 8. 手机托架背面(左侧)和正面(右侧)
第 3 步:固定手机夹
执行以下操作即可固定手机夹:
根据 ABS 开口夹的形状,裁剪氯丁橡胶薄膜,注意两端都要短出一英寸(如图 9 所示)。裁剪好氯丁橡胶板后,把组件装到 ABS 开口夹上(如图 8 所示)。

图 9. 装了氯丁橡胶板的 ABS 夹具将尼龙手拧螺钉和弹簧钢丝接到夹具。根据需要旋入尼龙螺母,从而缩小螺钉长度。

图 10. 带有氯丁橡胶板、手拧螺钉、尼龙螺母和弹簧钢丝的夹具将手机夹钳上的手拧螺钉拧入到手机夹的螺纹孔中(如图 11 所示)。您可以根据手机尺寸调整手机托架的位置。
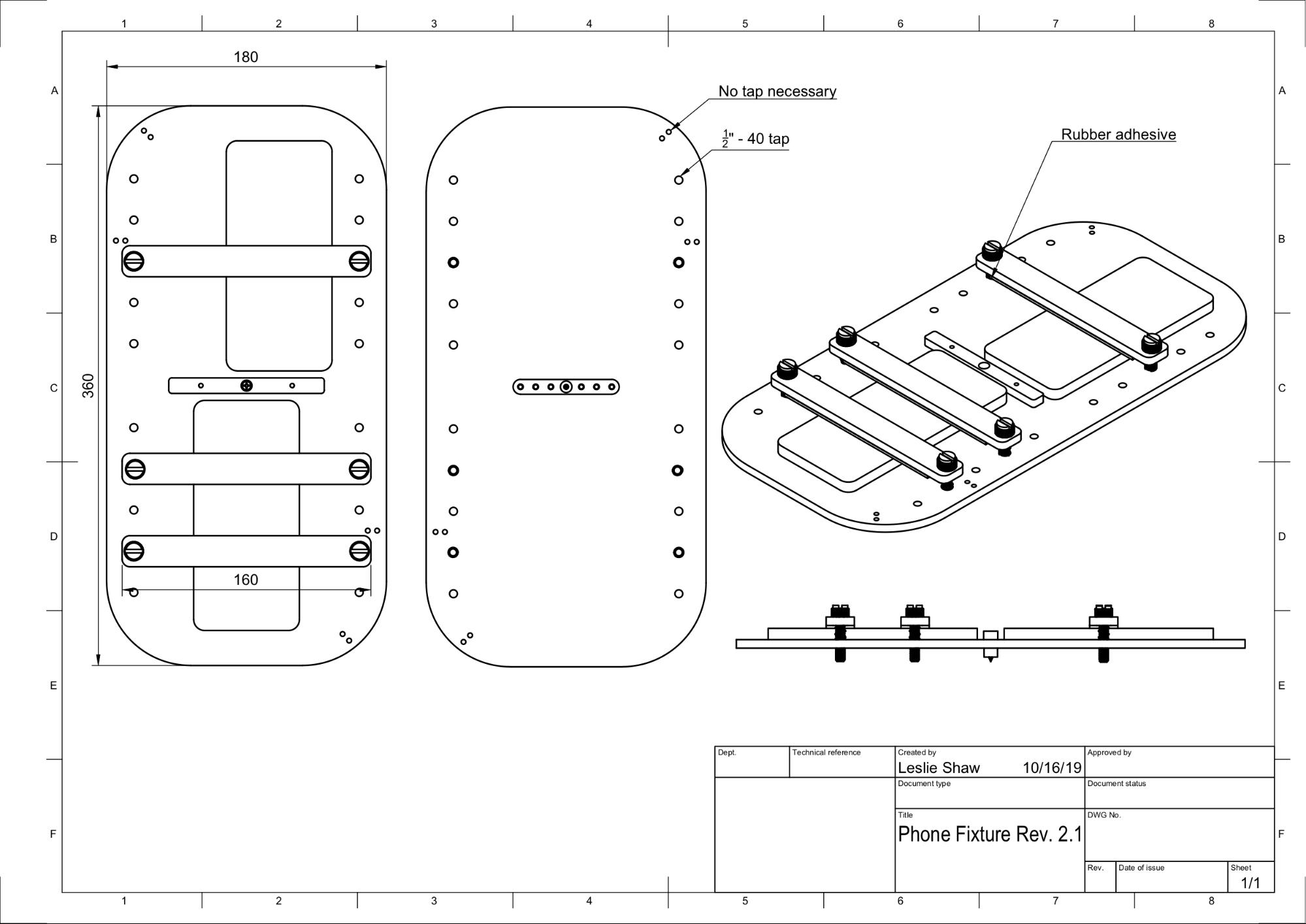
图 11. 手机夹的机械图纸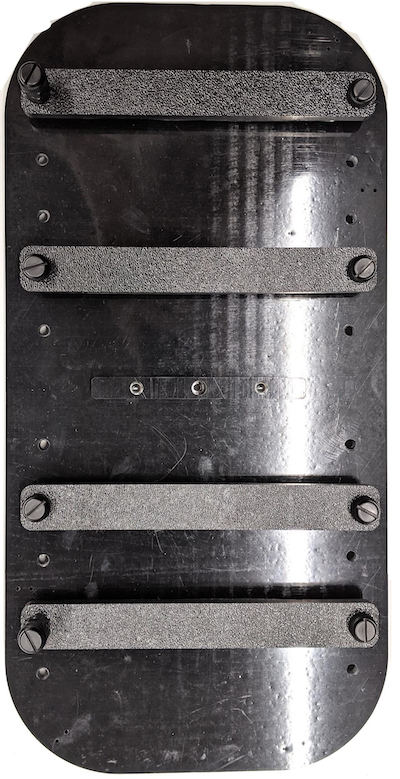
图 12. 组装好的手机夹
第 4 步:组装滑动门导轨
在盒子顶部和底部安装滑动板导轨(朝向前方)。图 13 显示的是将 6-32 螺钉固定在预攻螺纹孔中的效果。或者,您也可以使用自攻螺钉。

图 13. 安装在盒子顶部和底部的滑动板导轨
第 5 步:固定灯具
要固定灯架和漫射膜,请执行以下操作:
将两个手柄件叠放在一起,然后使用 6-32 螺钉(或自攻螺钉)将其组装起来。

图 14. 传感器融合盒手柄件及组装准备 4 组 4-40 螺钉、螺母和盖形螺母,将灯具套件上的安装架固定在盒壁上。
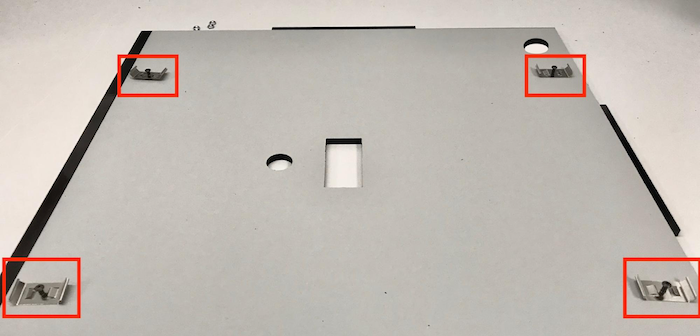
图 15. 盒内壁上的 4-40 螺钉和灯架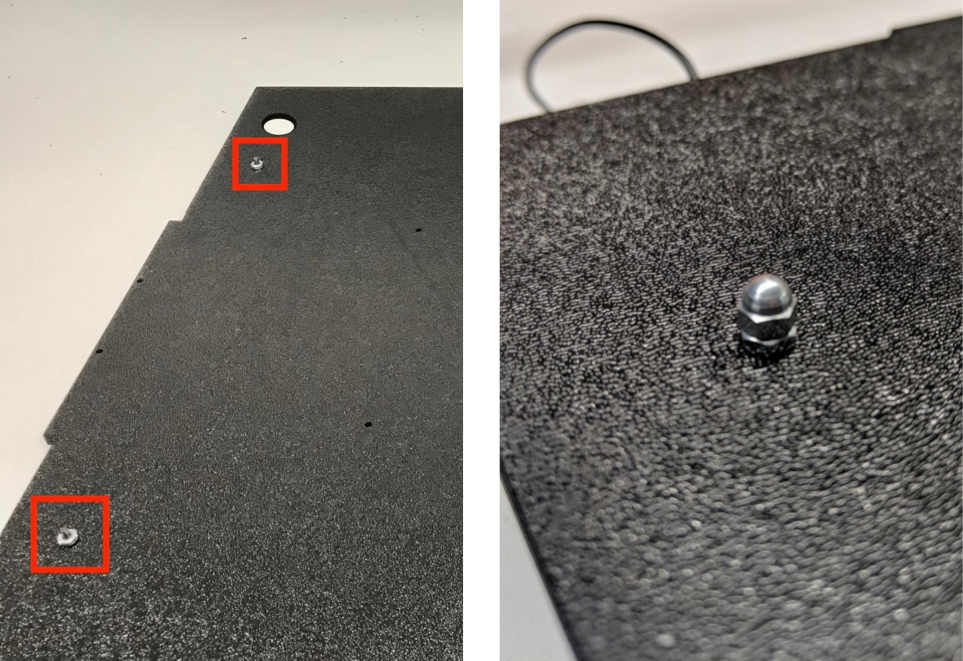
图 16. 从盒外部拧入螺孔的螺栓和盖形螺栓将灯光漫射膜裁成合适的尺寸,以便将灯棍包裹起来(如果灯上有扩散器则不需要)。

图 17. 灯棍和灯光漫射膜将灯光漫射膜裹在灯棍上,然后在背面用胶带粘好。

图 18. 从背面用胶带粘好的灯棍和灯光漫射膜将灯具卡入支架(可能会有点紧)。
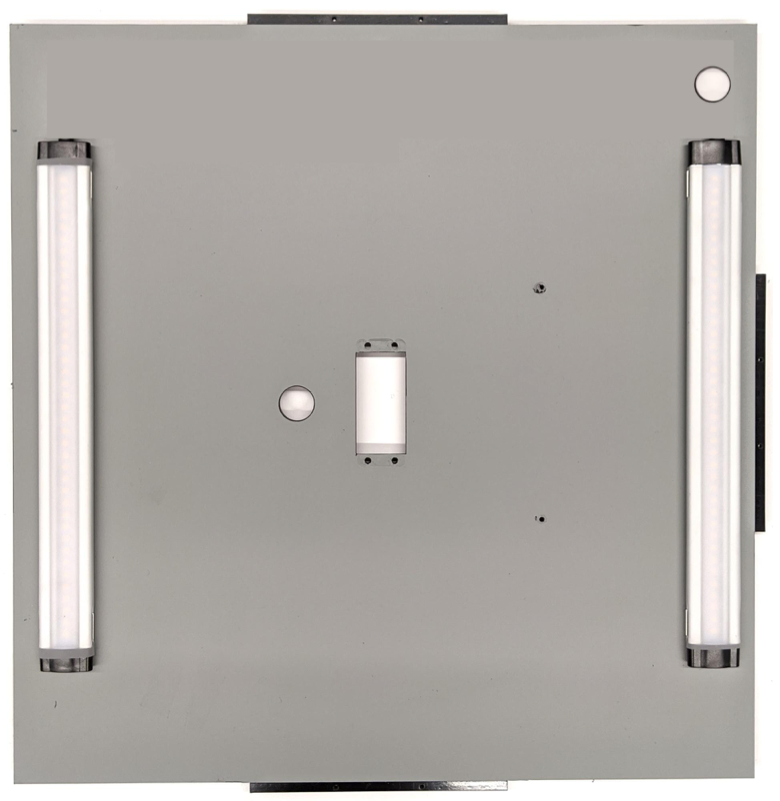
图 19. 安装在支架中的灯具
第 6 步:将手机夹固定在伺服器板上
执行以下操作即可将手机夹固定在伺服器板上:
准备 4 个 6-32 螺钉和一个伺服器板,以便将伺服器安装到盒壁上。将伺服器固定在内壁上,然后从内测将螺钉插入位于外壁上的伺服器板中。
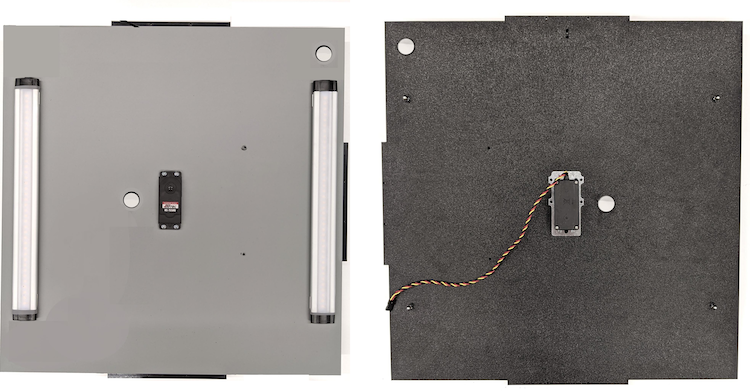
图 20. 使用 6-32 螺钉固定的伺服器和伺服器板使用尼龙锁紧螺母将手机夹固定到伺服器上(将轴的中心推入到伺服器的旋转中心)。

图 21. 伺服装置
用伺服器随附的伺服器螺钉,通过伺服器臂将手机夹固定(1.2 牛顿*米或 8.9 英寸*磅力)到伺服器上。
图 22. 伺服器臂
第 7 步:最终组装
执行以下操作即可完成传感器融合盒的组装:
从 Android 13 开始,传感器融合测试装置配有 Android 13 Arduino 照明控制器。(在 Android 12 或更低版本中,传感器融合装置配备的是 6 通道 Arduino 控制器或 Canakit 控制器。搭载 Android 11 到 Android 12 的设备兼容 Android 13 控制器、6 通道 Arduino 控制器或 Canakit 控制器。)将伺服器延长线连接到伺服控制器的任意通道,其中 GND 对应黑线,VCC 对应红线,SIG 对应黄线。
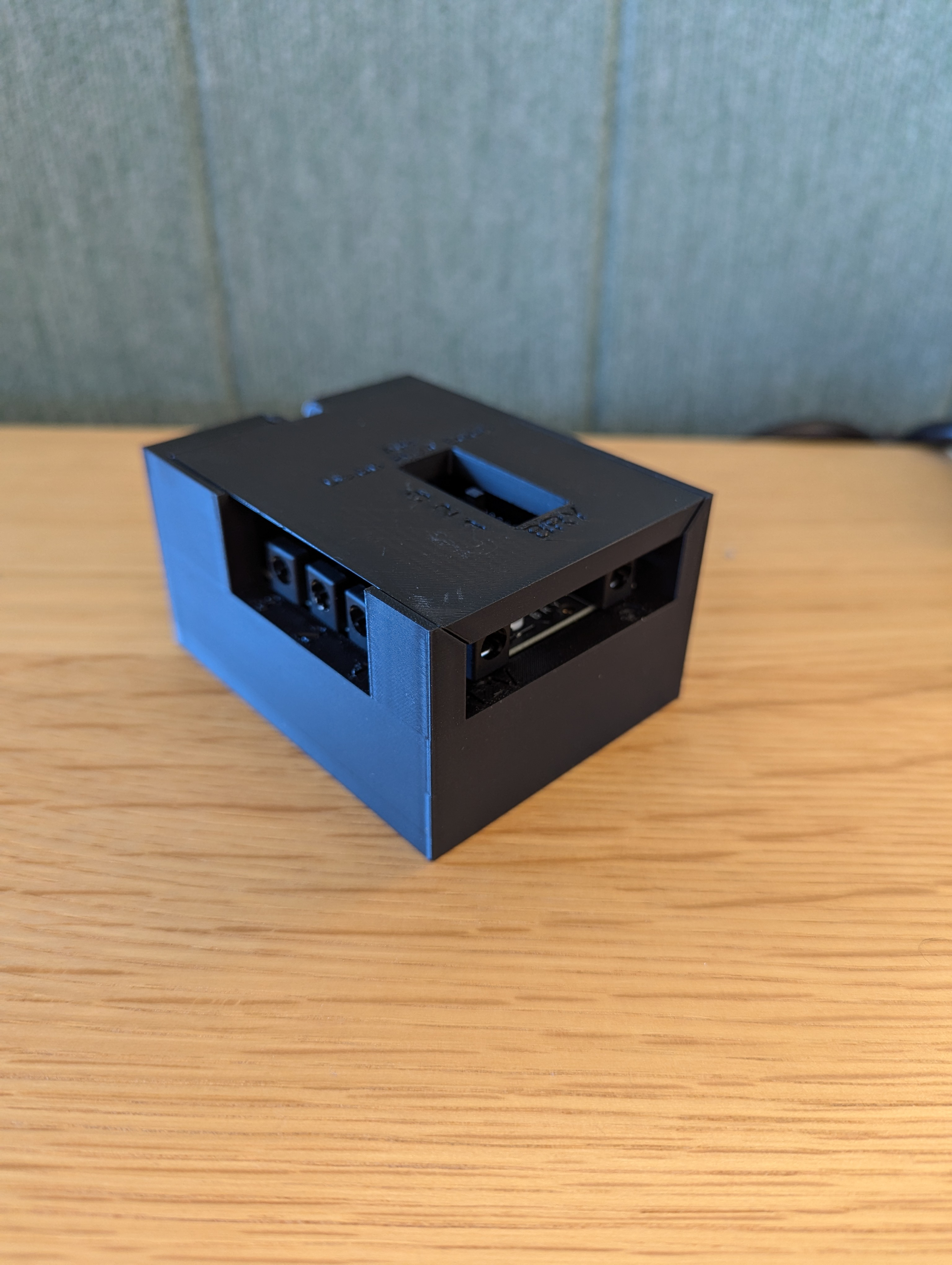
图 23. Arduino 照明控制器修订版 3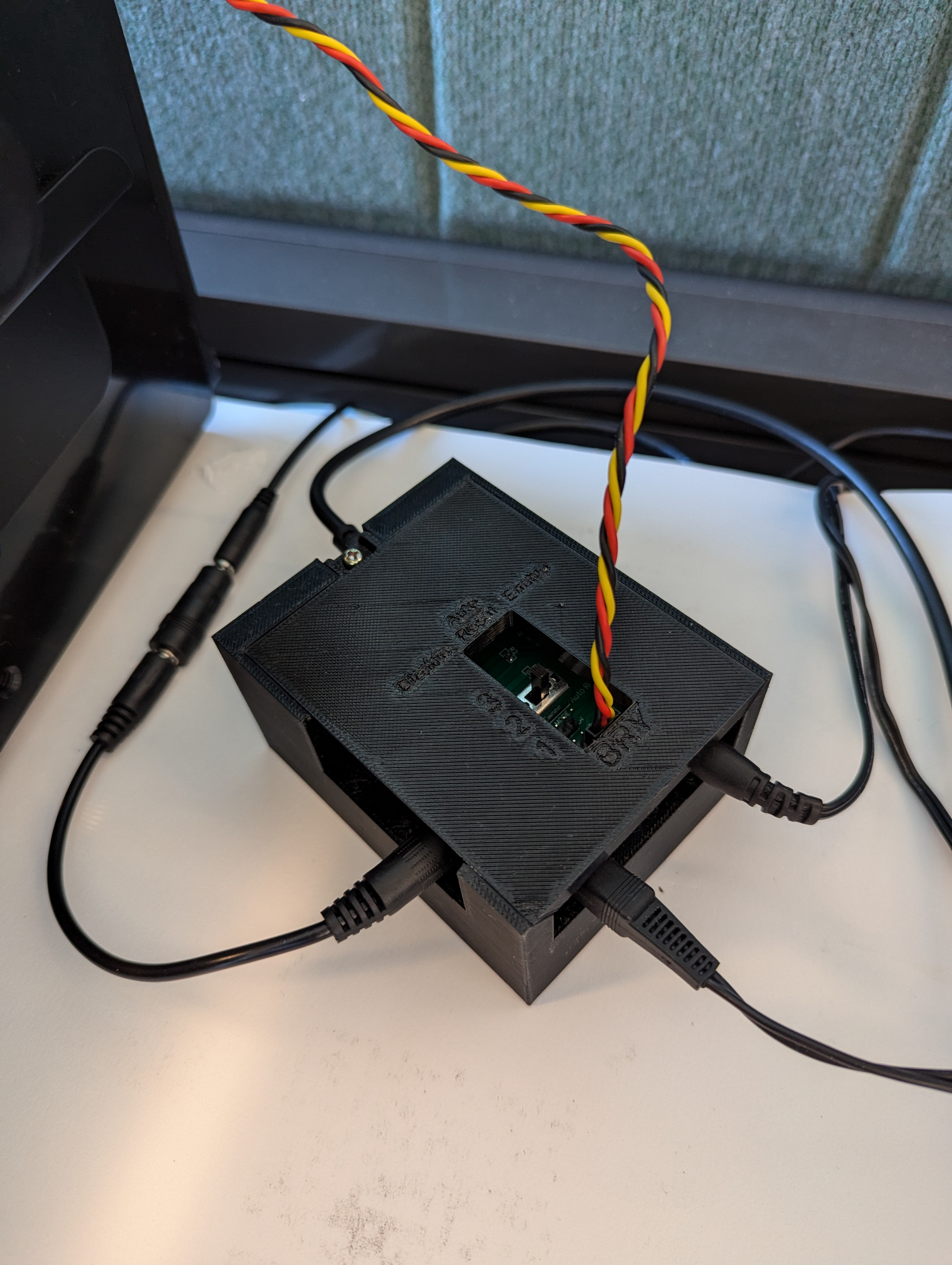
图 24. Arduino 照明控制器修订版 3 连接示例用胶带将盒子粘在一起,然后用螺钉将各部件固定到一起(您可能需要在某些部件上预先钻孔)。
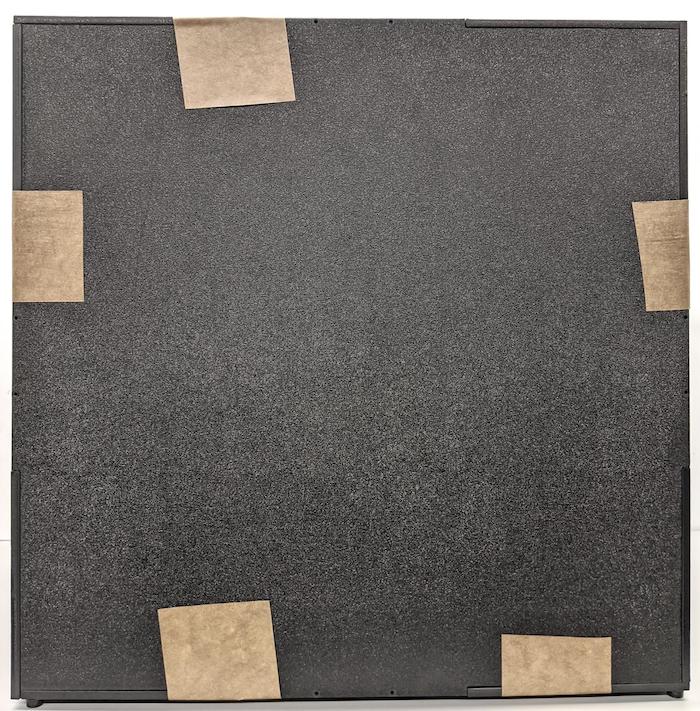
图 25. 用胶带粘好的传感器融合测试装置
对于 Android 15 或更高版本,请与当地的打印店合作,在 18 x 18 英寸的纸上打印 checkerboard.pdf 文件(包含在代码库的
test/sensor_fusion目录中),确保棋盘格图案的宽度与纸张的宽度一致,并且将图表用胶带粘到手机夹对面的盒壁上。对于视野范围较小的相机(例如长焦相机),请与当地的打印店合作,制作按比例缩放的棋盘格版本。(例如,缩放比例为 50% 的图表将在 9 x 9 英寸的纸张上打印。)
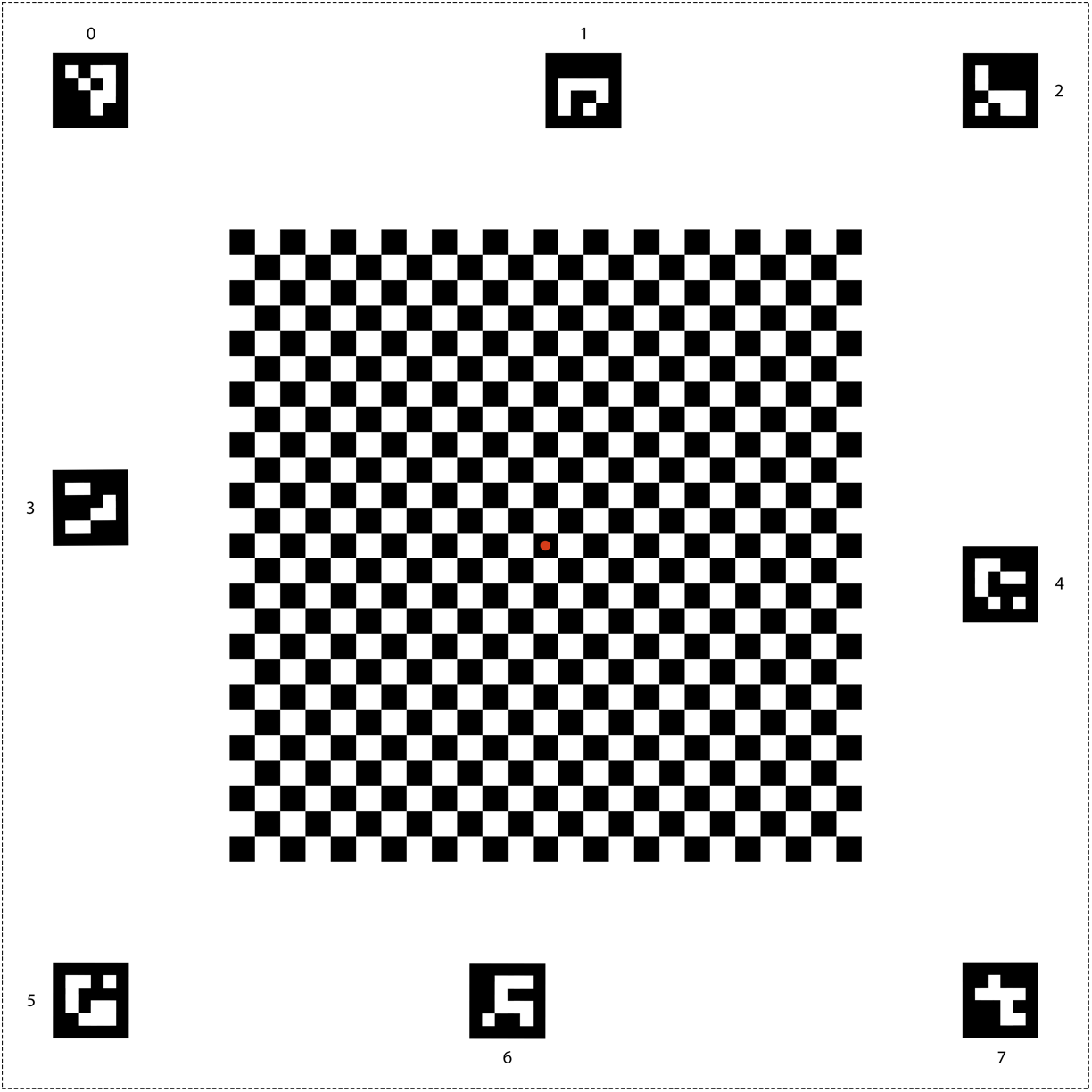
图 26. 适用于 Android 15 或更高版本的棋盘格图表。
将手机放置在手机夹上时,请确保棋盘格中心的红点正对着相机(如图 27 所示)。
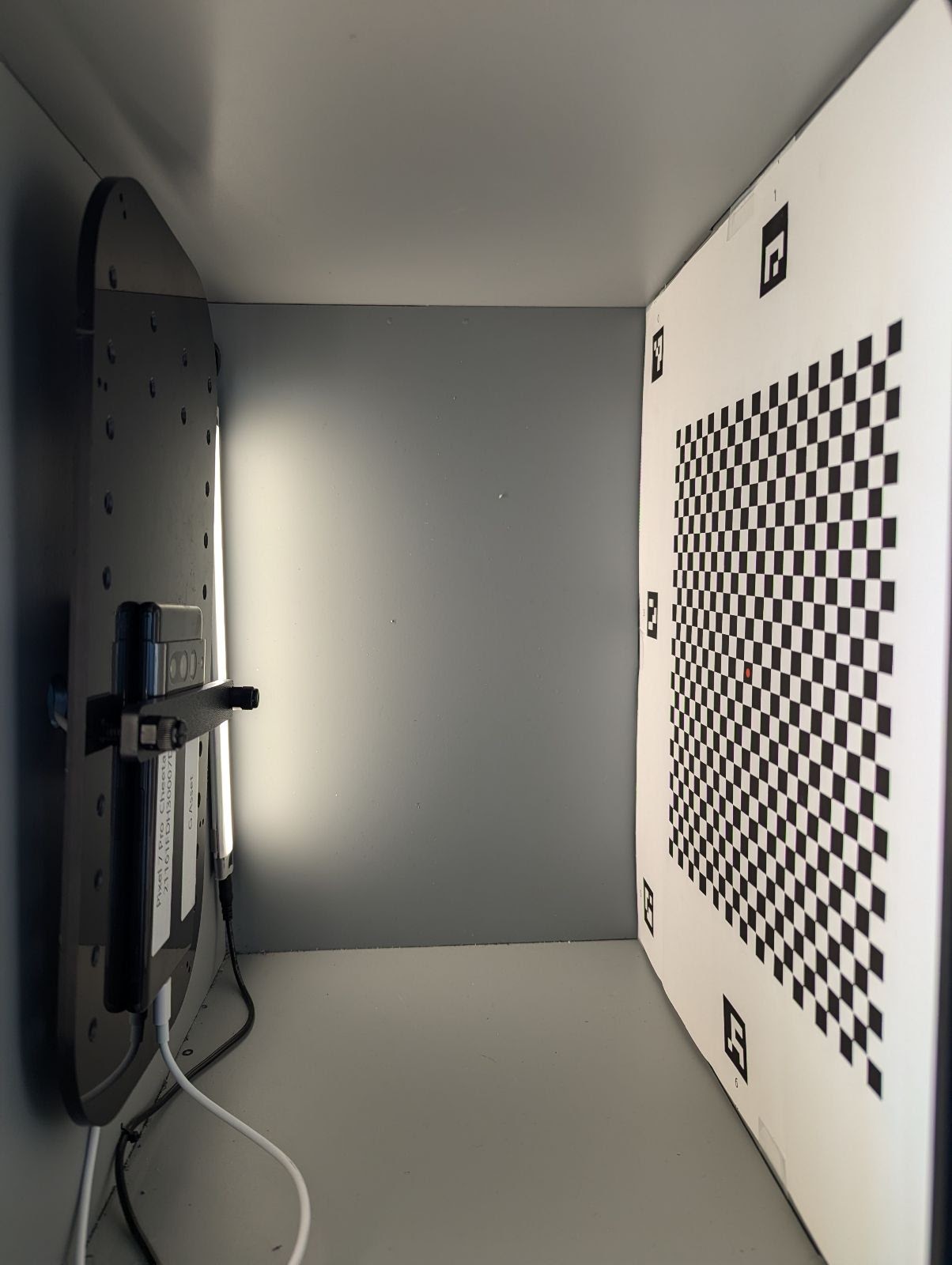
图 27.打印出来并用胶带粘到手机夹对面盒壁上的棋盘格。