
การทดสอบการผสานเซ็นเซอร์จะวัดความแม่นยำของการประทับเวลาของเซ็นเซอร์สำหรับอุปกรณ์ Android โดยเฉพาะเซ็นเซอร์ภาพกล้องและไจโรสโคป หน้านี้แสดงวิธีการทีละขั้นตอนเกี่ยวกับวิธีตั้งค่าการทดสอบ Sensor Fusion และ Sensor Fusion Box เป็นครั้งแรก
วิดีโอแนะนำ
วิดีโอนี้แสดงวิธีตั้งค่ากล่องฟิวชันเซ็นเซอร์
เครื่องมือที่จําเป็น
ก่อนเริ่มต้น โปรดตรวจสอบว่าคุณมีคอมโพเนนต์ต่อไปนี้

- สาย USB A to B
- สาย USB A to C (สำหรับโทรศัพท์ทดสอบ)
- สายไฟ 12V 2A (สำหรับกล่องควบคุมเซอร์โว)
- สายไฟ 12 โวลต์ (สำหรับแสงสว่างพร้อมสวิตช์)
- สายเชื่อมต่อแบบตัวผู้ต่อตัวผู้ 5V (สำหรับแสงสว่าง)
- สายแปลงแบบตัวผู้-ตัวเมีย 5V (สำหรับแสงสว่าง)
ขั้นตอนที่ 1: เชื่อมต่อหลอดไฟ
วิธีเชื่อมต่อหลอดไฟ
- ใช้สายตัวผู้ต่อกับตัวผู้เพื่อเชื่อมต่อหลอดไฟ 2 ดวงที่ปลายด้านล่างของหลอดไฟดังที่แสดงในรูปที่ 2 ยึดสายที่ด้านล่างของกล่องเพื่อไม่ให้สายรบกวนการทํางาน
- เชื่อมต่อปลายหลอดไฟที่อยู่ใกล้กับรูทางออกของสายไฟกับสายแปลง
รูปที่ 2 การเชื่อมต่อหลอดไฟแต่ละดวงเข้าด้วยกัน และเชื่อมต่อหลอดไฟ 1 ดวงกับสายแปลง - รูสำหรับเดินสายไฟ
- รูสำหรับสาย USB
- สายแปลงแบบตัวผู้ต่อตัวผู้ 5V
- ร้อยปลายสายแปลงที่ไม่ได้เชื่อมต่อผ่านรูกลมซึ่งออกมาจากกล่อง แล้วต่อเข้ากับสายไฟสำหรับแสง
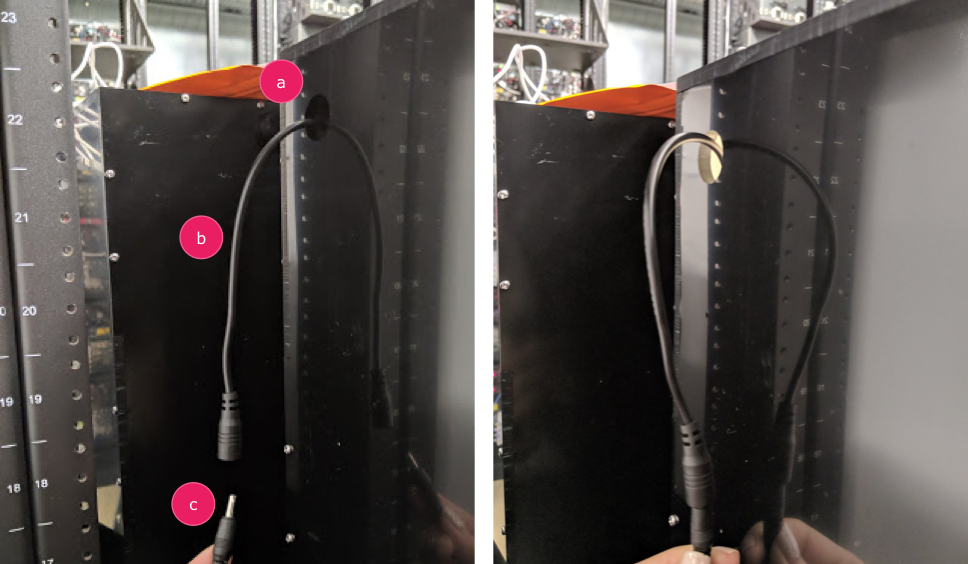
รูปที่ 3 สายแปลงแสงที่ออกมาจากกล่องและเชื่อมต่อกับสายไฟ - รูทางออก
- สายแปลง
- สายชาร์จ
ขั้นตอนที่ 2: ยึดเซอร์โว
วิธีต่อเซอร์โว
- เสียบขั้วต่อเซอร์โวเข้ากับตัวควบคุมเซอร์โว ตรวจสอบว่าได้เสียบขั้วต่อโดยให้สีตรงกับที่ระบุไว้ (Y = สีเหลือง, R = สีแดง, B = สีดำ) เนื่องจากการเชื่อมต่อผิดลำดับอาจทำให้มอเตอร์เสียหาย หากสายไฟสั้นเกินไป ให้ใช้
สายต่อเซอร์โว
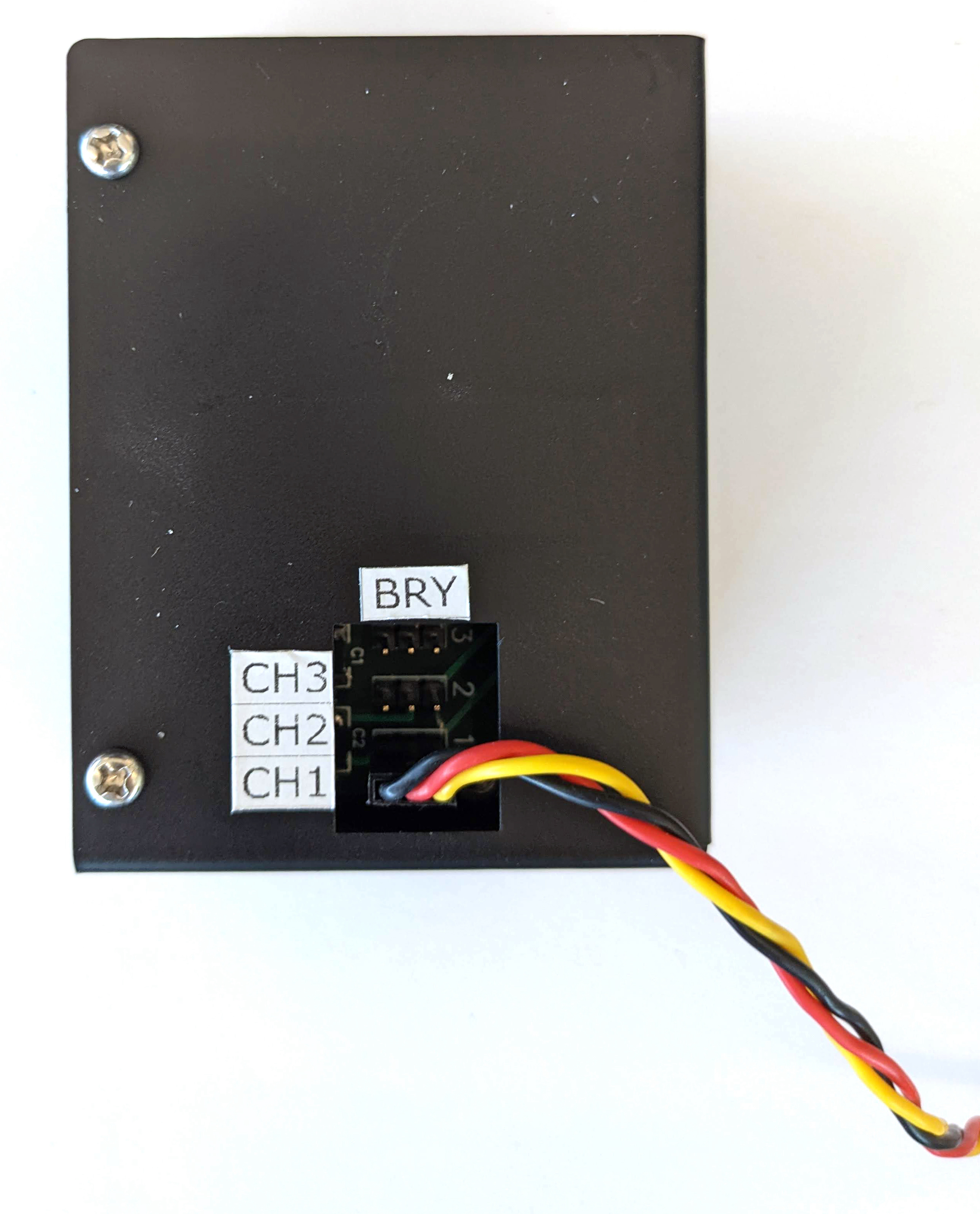
รูปที่ 4 เซอร์โวที่เชื่อมต่อกับกล่องควบคุมเซอร์โว - เชื่อมต่อตัวควบคุมเซอร์โวกับสายไฟ (ระบบแสงสว่างและตัวควบคุมเซอร์โวมีแหล่งจ่ายไฟแยกต่างหาก)

รูปที่ 5 การเชื่อมต่อตัวควบคุมเซอร์โวกับสายไฟ โดยเฉพาะ - ใช้สาย USB A to B เพื่อเชื่อมต่อกล่องควบคุมเซอร์โวกับโฮสต์ (เครื่องที่ทำการทดสอบ)
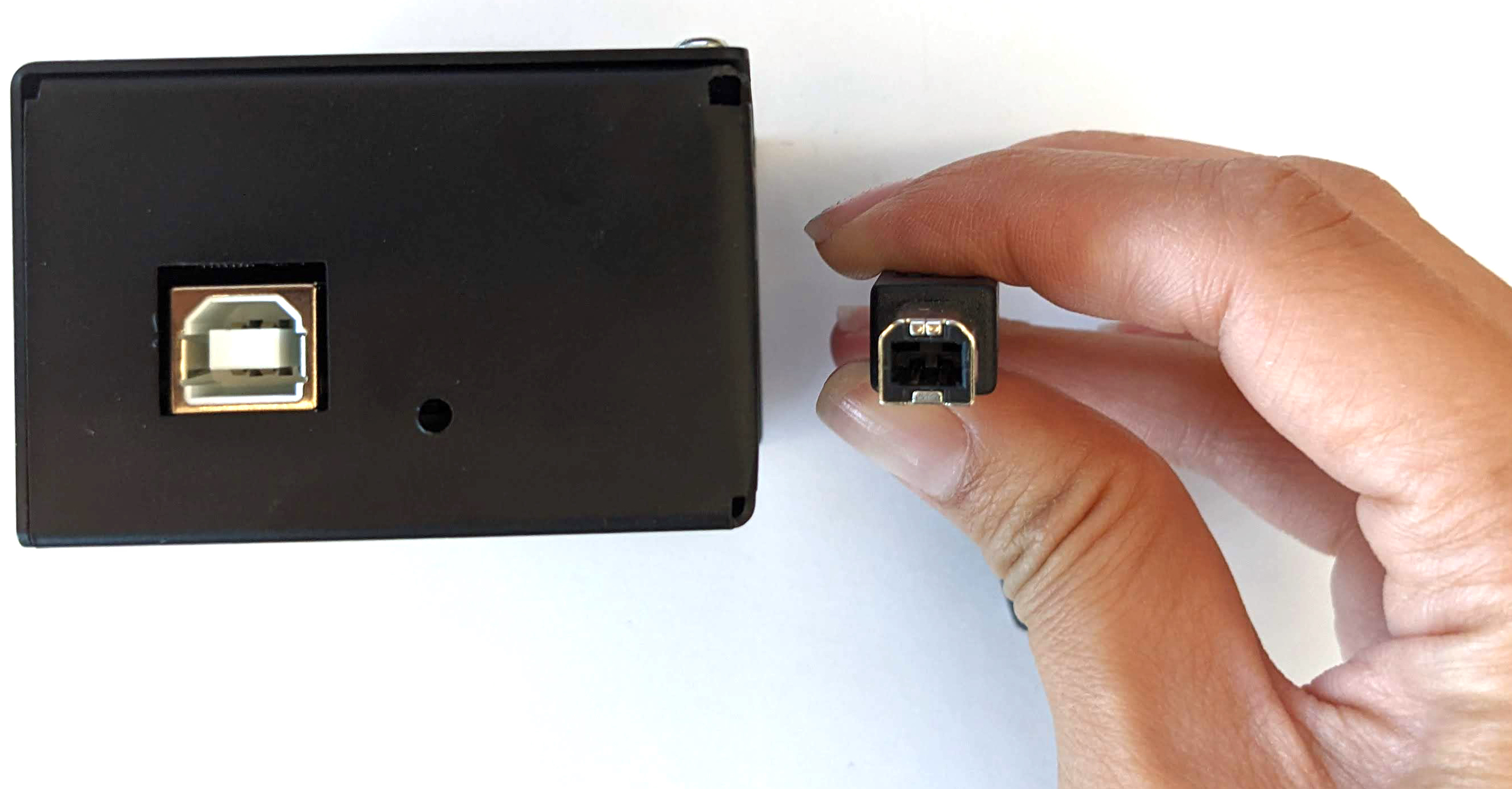
รูปที่ 6 การเชื่อมต่อกล่องควบคุมเซอร์โวกับเครื่องโฮสต์
ขั้นตอนที่ 3: แนบโทรศัพท์
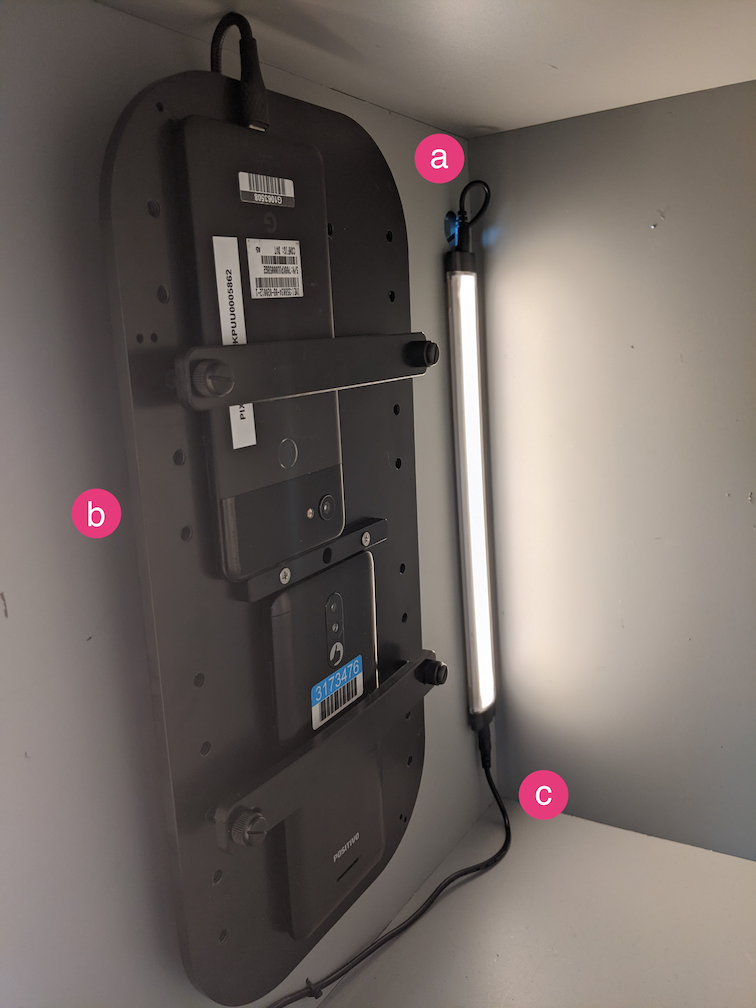
- วางโทรศัพท์บนตัวยึดและยึดให้แน่น ขันให้แน่นโดยหมุนสกรูไนลอนไปทางขวา

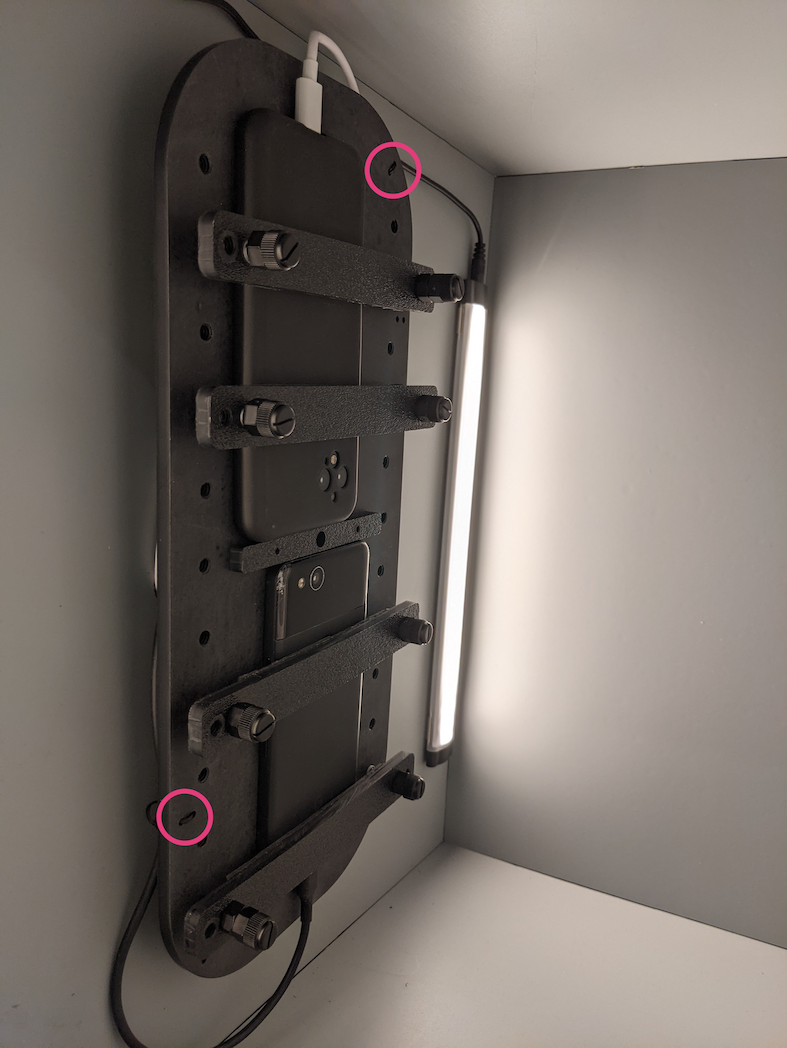
รูปที่ 7 การวางและยึดโทรศัพท์บนขายึด ควรวางโทรศัพท์ในลักษณะที่สาย USB อยู่บริเวณขอบของที่ยึดโทรศัพท์และกล้องอยู่ใกล้กับกึ่งกลางของที่ยึด
- ใช้สายรัดเพื่อยึดสาย USB ของโทรศัพท์กับเพลตยึดและนำสายออกนอกกล่องผ่านรูทางออก เสียบปลายอีกด้านของสายเข้ากับโฮสต์ที่ทำการทดสอบ
รูปที่ 8 สาย USB ของโทรศัพท์ยึดกับอุปกรณ์ด้วย
ขั้นตอนที่ 4: เรียกใช้สคริปต์ทดสอบ
ไฟล์ปฏิบัติการ Python หลักสำหรับสคริปต์ทดสอบคือ
python tools/run_all_tests.py device=ID camera=0 scenes=sensor_fusion rot_rig=default
คุณสามารถแก้ไขคําสั่งเพื่อระบุที่อยู่ของตัวหมุนจริงได้โดยใช้
rot_rig=VID:PID:CH
- หากต้องการระบุรหัสผู้ให้บริการ (VID) และรหัสผลิตภัณฑ์ (PID) ให้ใช้คำสั่ง
lsusbใน Linux - โดยค่าเริ่มต้น VID และ PID จะตั้งค่าเป็น
04d8และfc73ที่มีแชแนล "1"
การเรียกใช้หลายครั้ง รูปแบบที่แตกต่างกัน
หากต้องการเรียกใช้หลายครั้งด้วยรูปแบบที่แตกต่างกัน คุณสามารถใช้สคริปต์อื่นได้ (แต่ระบบจะไม่อัปโหลดผลลัพธ์ไปยัง CtsVerifier.apk) ตัวอย่างสคริปต์ทดสอบ
python tools/run_sensor_fusion_box.py device=FA7831A00278 camera=0 rotator=default img_size=640,360 fps=30 test_length=7ปัญหาเกี่ยวกับสิทธิ์
วิธีแก้ปัญหาสิทธิ์ที่เกี่ยวข้องกับการควบคุมมอเตอร์ผ่านพอร์ต USB
- เพิ่มชื่อผู้ใช้ของผู้ให้บริการไปยังกลุ่ม
dialoutโดยใช้sudo adduser USERNAME dialout - ออกจากระบบของโอเปอเรเตอร์
- เข้าสู่ระบบโอเปอเรเตอร์