
Kiểm thử hợp nhất cảm biến đo lường độ chính xác của dấu thời gian của cảm biến cho các thiết bị Android, cụ thể là cảm biến hình ảnh máy ảnh và con quay hồi chuyển. Trang này cung cấp hướng dẫn từng bước về cách thiết lập thử nghiệm Sensor Fusion và Sensor Fusion Box lần đầu tiên.
Video hướng dẫn
Đây là video hướng dẫn cách thiết lập hộp hợp nhất cảm biến.
Các công cụ bắt buộc
Trước khi bắt đầu, hãy đảm bảo bạn có các thành phần sau:

- Cáp USB A sang B
- Cáp USB A sang C (dùng cho điện thoại thử nghiệm)
- Dây nguồn 12V 2A (dành cho hộp điều khiển servo)
- Dây nguồn 12V (dùng cho đèn, có công tắc)
- Cáp kết nối dương-dương 5V (dành cho hệ thống chiếu sáng)
- Cáp chuyển đổi dương-âm 5V (dùng cho đèn)
Bước 1: Kết nối đèn
Cách kết nối đèn:
- Sử dụng cáp đực-đực để kết nối hai đèn ở đầu dưới cùng của đèn như trong hình 2. Cố định cáp vào đáy hộp để cáp không ảnh hưởng đến hoạt động.
- Kết nối đầu của đèn gần lỗ thoát cáp đèn với cáp chuyển đổi
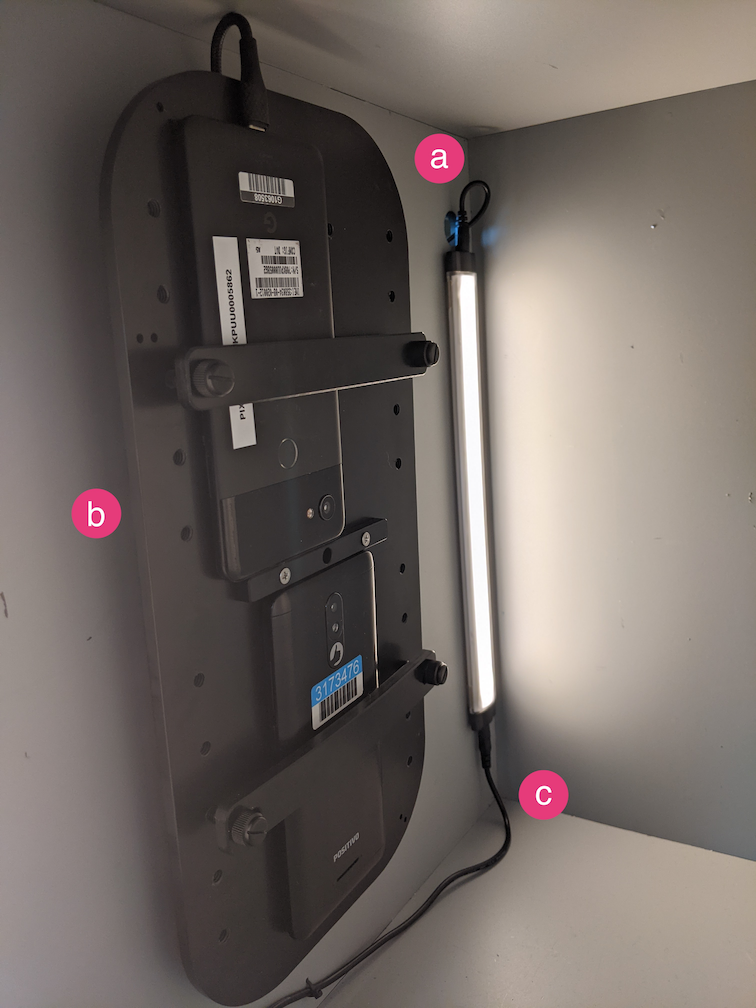
Hình 2. Kết nối các đèn với nhau và một đèn với cáp chuyển đổi - Lỗ thoát cáp ánh sáng
- Lỗ thoát cáp USB
- Cáp chuyển đổi dương-dương 5V
- Luồn đầu chưa kết nối của cáp chuyển đổi qua lỗ tròn ở hộp, sau đó kết nối với cáp nguồn để chiếu sáng.
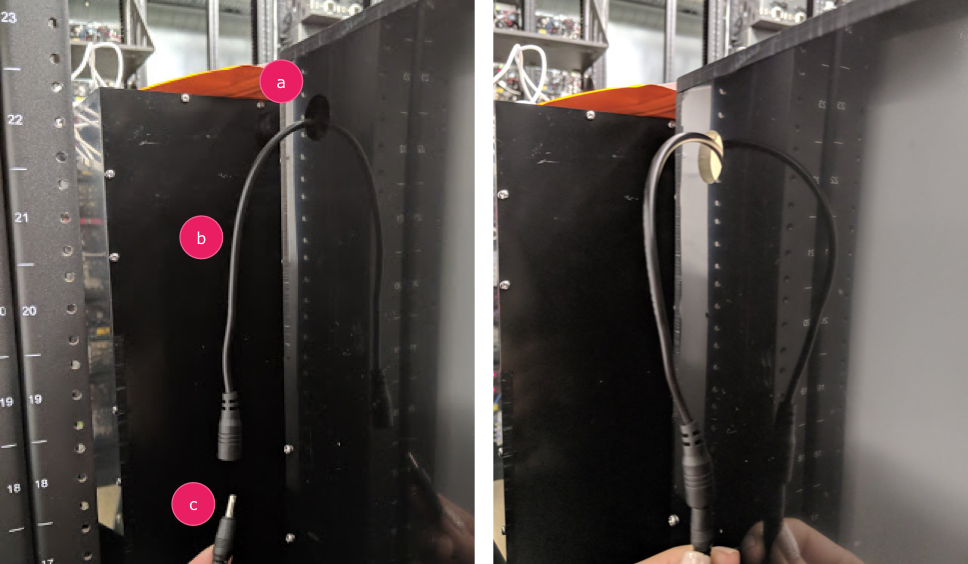
Hình 3. Cáp chuyển đổi ánh sáng đi ra khỏi hộp và kết nối với cáp nguồn - Lỗ thoát
- Cáp chuyển đổi
- Cáp nguồn
Bước 2: Gắn servo
Cách gắn servo:
- Cắm đầu nối servo vào bộ điều khiển servo. Hãy nhớ chèn đầu nối theo hướng màu tương ứng như được gắn nhãn (Y = Vàng, R = Đỏ, B = Đen), vì việc đảo ngược thứ tự có thể làm hỏng động cơ. Nếu dây quá ngắn, hãy sử dụng
cáp nối dài servo.

Hình 4. Servo kết nối với hộp điều khiển servo - Kết nối bộ điều khiển servo với dây nguồn (đèn chiếu sáng và bộ điều khiển servo có nguồn điện độc lập, chuyên dụng).

Hình 5. Kết nối bộ điều khiển servo với cáp nguồn chuyên dụng - Sử dụng cáp USB A đến B để kết nối hộp điều khiển servo với máy chủ (máy đang chạy chương trình kiểm thử).
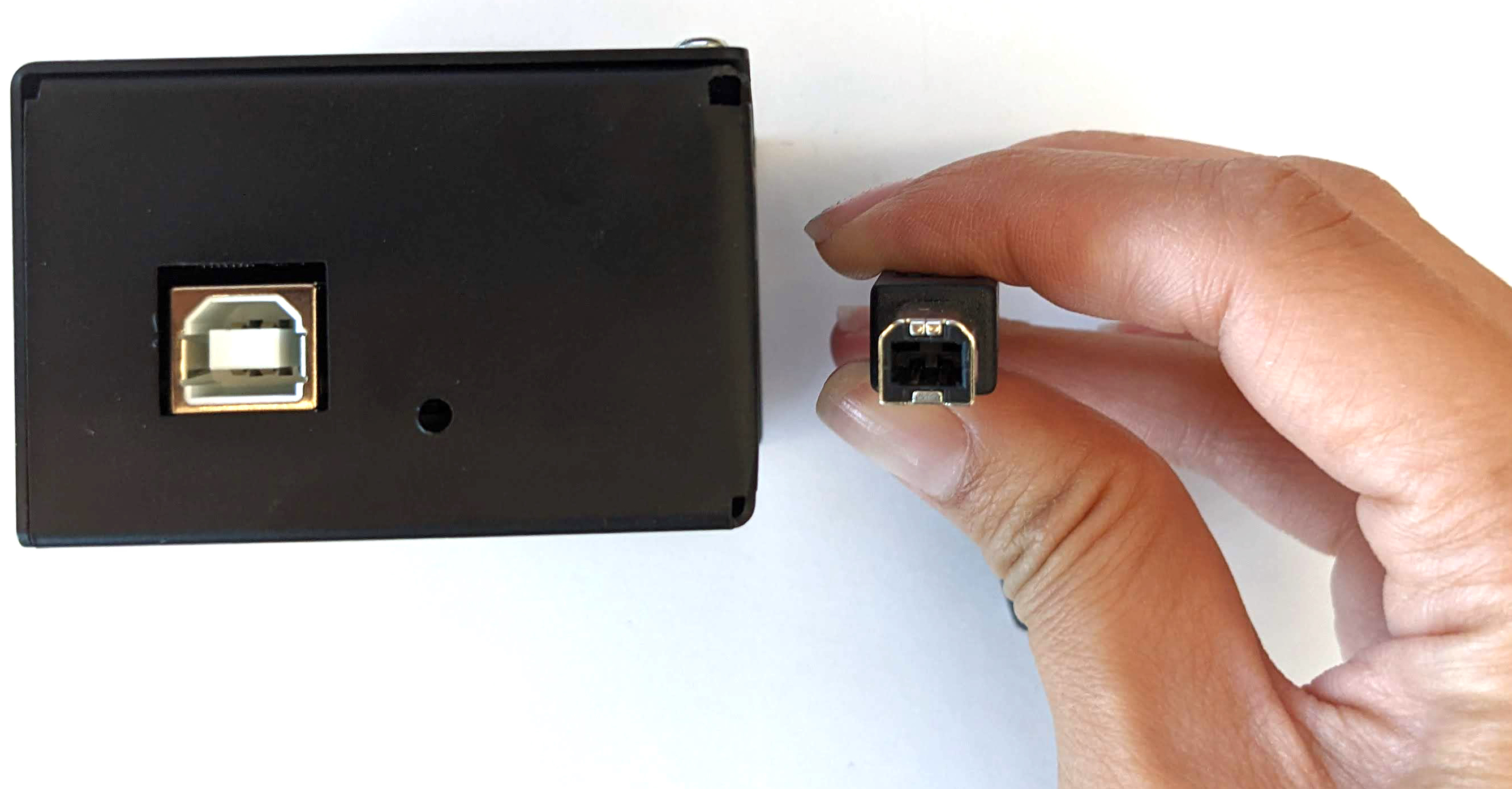
Hình 6. Kết nối hộp điều khiển servo với máy chủ
Bước 3: Đính kèm điện thoại
- Đặt điện thoại lên giá đỡ và kẹp chặt. Vặn vít nylon sang phải để siết chặt.

Hình 7. Đặt và kẹp điện thoại vào thiết bị cố định Bạn nên đặt điện thoại sao cho dây USB nằm ở ngoại vi của giá đỡ điện thoại và camera nằm gần tâm của giá đỡ.
- Dùng dây buộc để giữ cáp USB của điện thoại vào tấm cố định và dẫn cáp ra ngoài hộp thông qua lỗ thoát. Cắm đầu còn lại của dây vào máy chủ lưu trữ đang chạy chương trình kiểm thử.
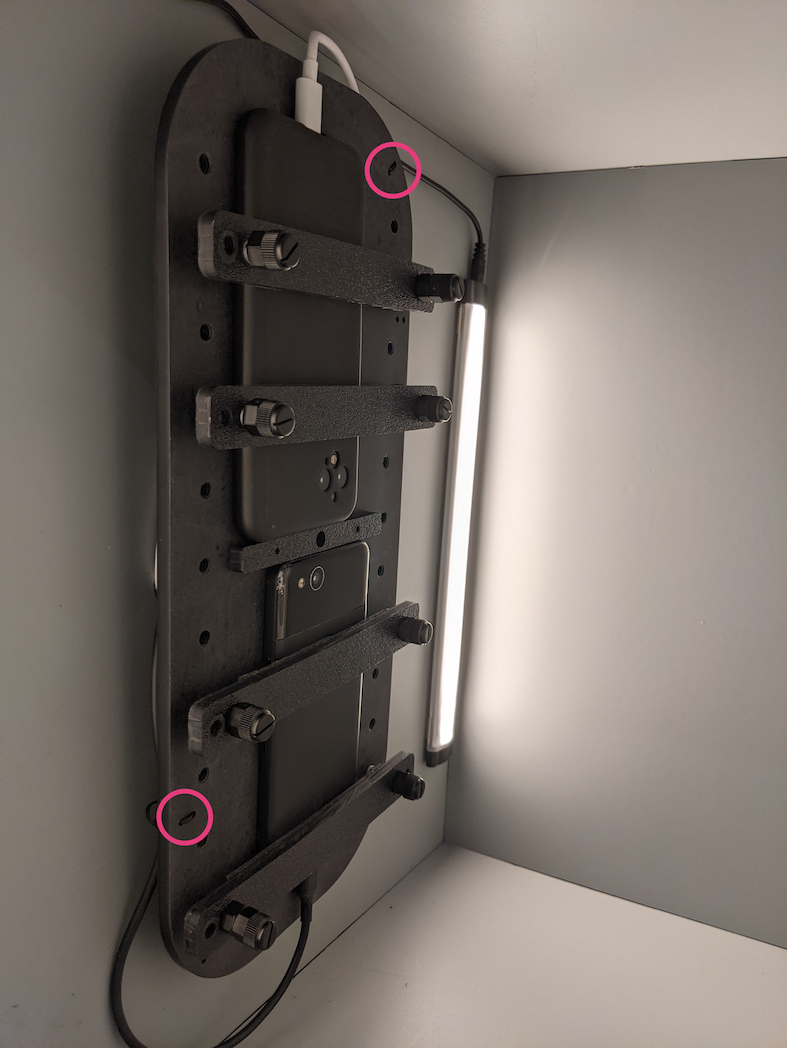
Hình 8. Dây USB của điện thoại được giữ cố định bằng dây buộc
Bước 4: Chạy tập lệnh kiểm thử
Tệp thực thi python chính cho tập lệnh kiểm thử là:
python tools/run_all_tests.py device=ID camera=0 scenes=sensor_fusion rot_rig=default
Bạn có thể sửa đổi lệnh để chỉ định địa chỉ thực tế của bộ xoay bằng cách sử dụng:
rot_rig=VID:PID:CH
- Để xác định Mã nhà cung cấp (VID) và Mã sản phẩm (PID), hãy sử dụng lệnh
lsusbcủa Linux. - Theo mặc định, VID và PID được đặt thành
04d8vàfc73với kênh "1".
Nhiều lần chạy, nhiều định dạng
Để thực hiện nhiều lần chạy với các định dạng khác nhau, bạn có thể sử dụng một tập lệnh khác (tuy nhiên, kết quả sẽ không được tải lên CtsVerifier.apk). Tập lệnh kiểm thử mẫu:
python tools/run_sensor_fusion_box.py device=FA7831A00278 camera=0 rotator=default img_size=640,360 fps=30 test_length=7Vấn đề về quyền
Cách giải quyết các vấn đề về quyền liên quan đến việc điều khiển động cơ thông qua cổng USB:
- Thêm tên người dùng của người vận hành vào nhóm
dialoutbằng cách sử dụng:sudo adduser USERNAME dialout - Đăng xuất người vận hành.
- Đăng nhập cho người vận hành.