
Le test de fusion de capteurs mesure la précision du code temporel des capteurs pour les appareils Android, en particulier les capteurs d'image de l'appareil photo et les gyroscopes. Cette page explique étape par étape comment configurer le test de fusion de capteurs et la boîte de fusion de capteurs pour la première fois.
Tutoriel vidéo
Ce tutoriel vidéo explique comment configurer la boîte de fusion de capteurs.
Outils requis
Avant de commencer, assurez-vous de disposer des composants suivants:

- Câble USB A vers B
- Câble USB-A vers USB-C (pour le téléphone de test)
- Cordon d'alimentation 12 V 2 A (pour le boîtier de commande de servomoteur)
- Cordon d'alimentation 12 V (pour l'éclairage, avec interrupteur)
- Câble de connexion mâle-mâle 5 V (pour l'éclairage)
- Câble de conversion mâle-femelle 5 V (pour l'éclairage)
Étape 1: Connecter les ampoules
Pour connecter les ampoules:
- Utilisez le câble mâle-mâle pour connecter les deux lampes à leurs extrémités inférieures, comme illustré à la figure 2. Fixez le câble au bas de la boîte pour éviter qu'il ne gêne le fonctionnement.
- Connectez l'extrémité de la lampe la plus proche du trou de sortie du câble de la lampe au câble de conversion.
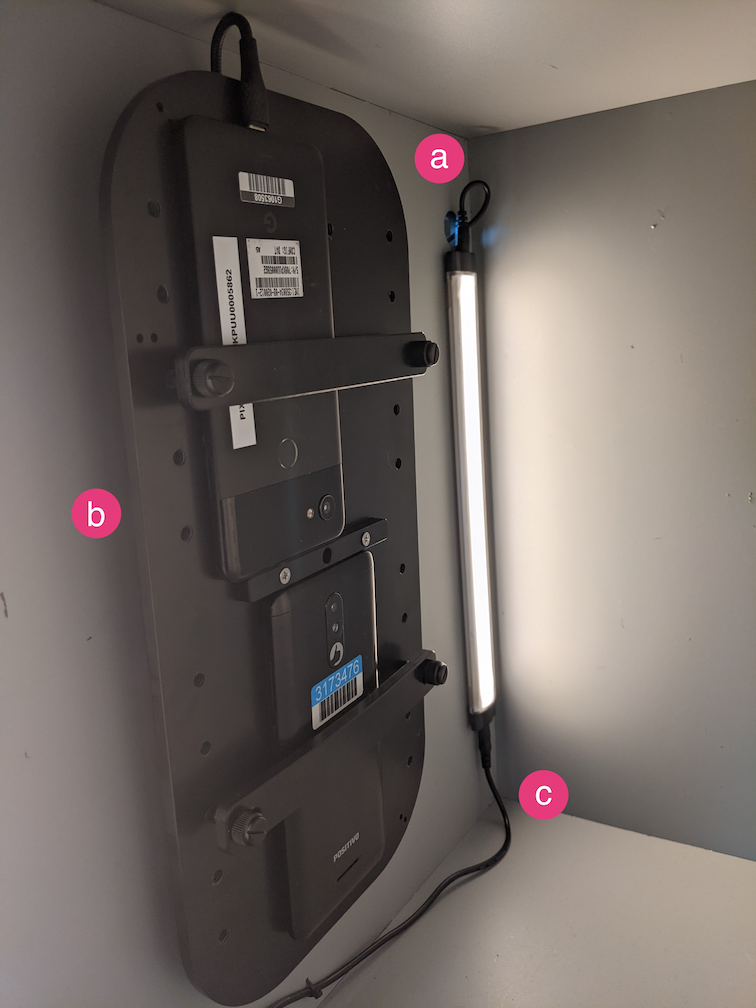
Figure 2. Connecter les ampoules entre elles et une ampoule au câble de conversion - Trou de sortie du câble d'éclairage
- Trou de sortie du câble USB
- Câble de conversion mâle-mâle 5 V
- Faites passer l'extrémité non connectée du câble de conversion dans le trou rond qui sort de la boîte, puis connectez-la au câble d'alimentation pour l'éclairage.
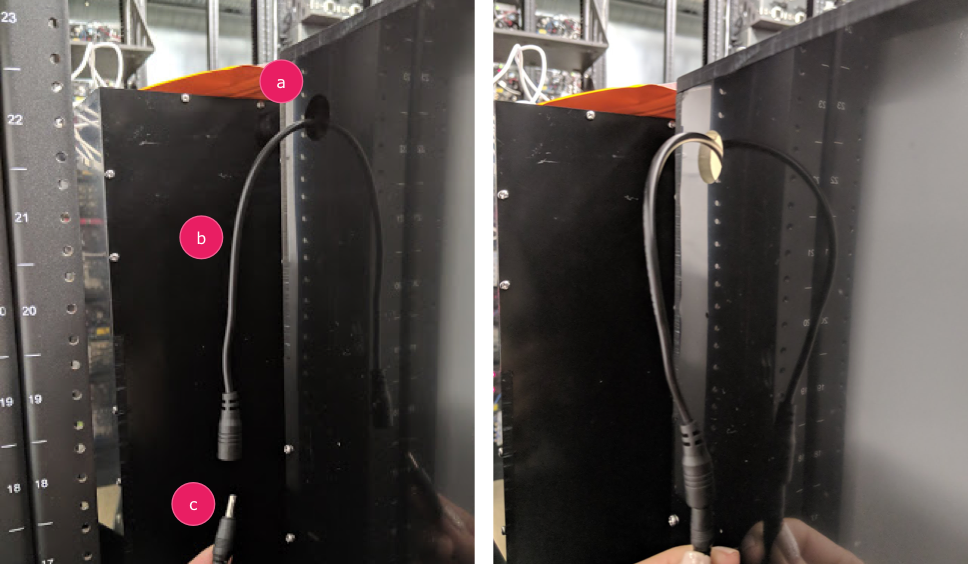
Figure 3 Câble de conversion d'éclairage sortant du boîtier et connecté au câble d'alimentation - Orifice de sortie
- Câble de conversion
- Câble d'alimentation
Étape 2: Fixer le servomoteur
Pour fixer le servomoteur:
- Branchez le connecteur du servomoteur à la commande du servomoteur. Veillez à insérer le connecteur en orientant les couleurs correspondantes comme indiqué (Y = jaune, R = rouge, B = noir), car inverser l'ordre pourrait endommager le moteur. Si le câble est trop court, utilisez un
câble de rallonge pour servomoteur.
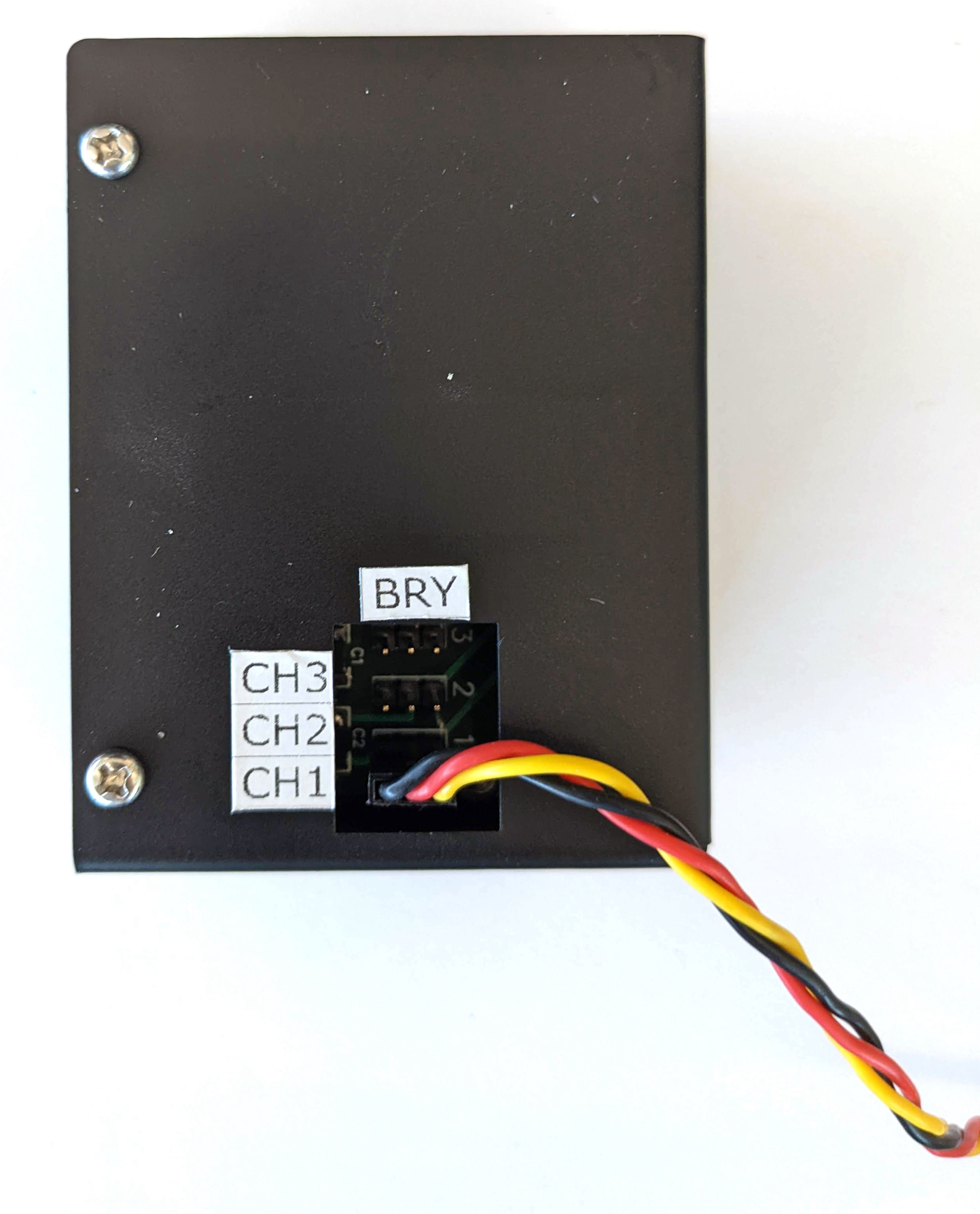
Figure 4 Servo connecté à la boîte de contrôle du servo - Connectez le contrôleur de servomoteur à l'aide de son câble d'alimentation (l'éclairage et le contrôleur de servomoteur disposent d'alimentations indépendantes et dédiées).

Figure 5 Connecter le contrôleur de servomoteur à son câble d'alimentation dédié - Utilisez le câble USB A vers B pour connecter le boîtier de commande de servomoteur à l'hôte (machine qui exécute le test).
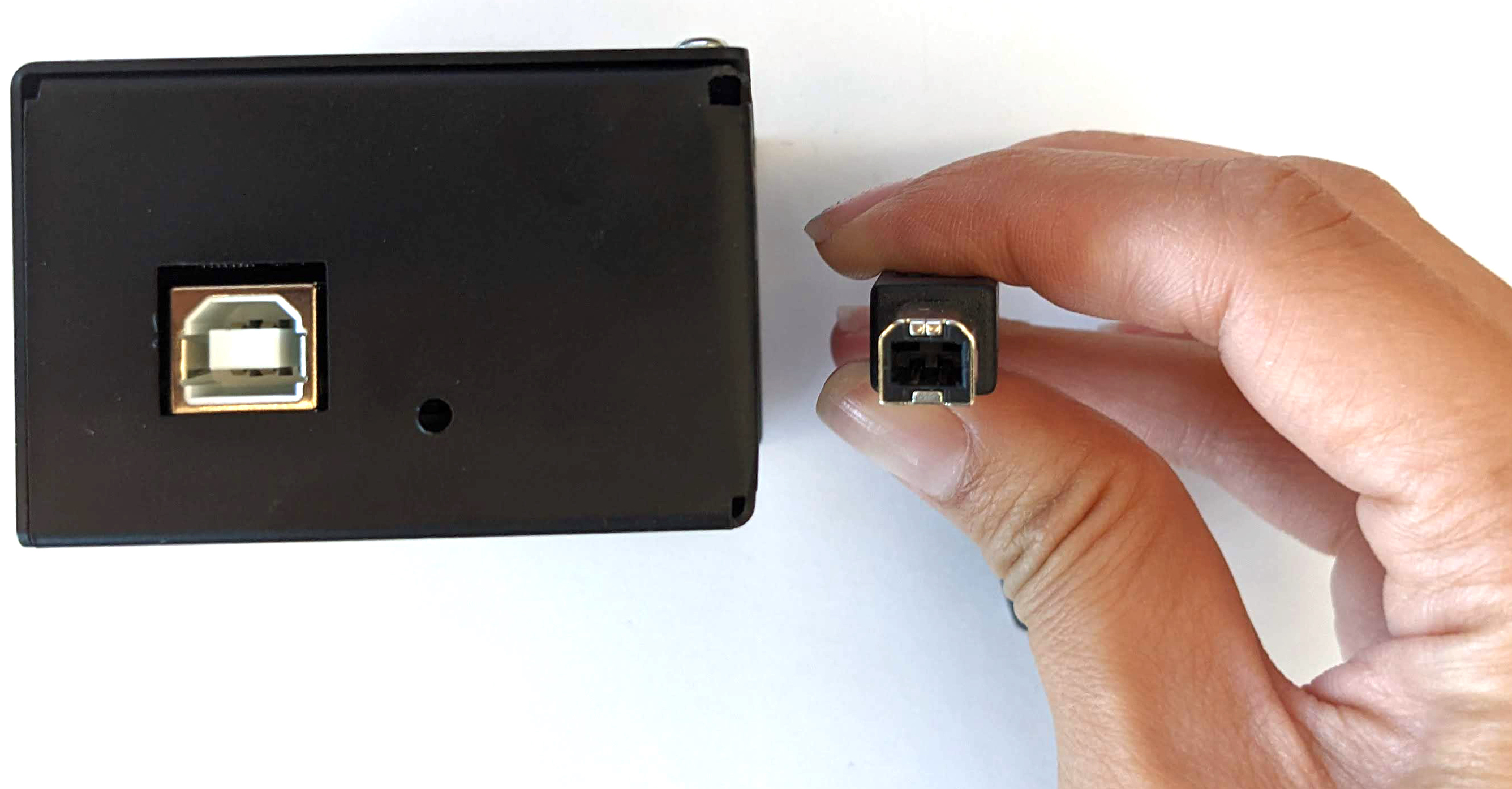
Figure 6 Connexion du boîtier de commande du servomoteur à la machine hôte
Étape 3: Connectez le téléphone
- Placez le téléphone sur le support et fixez-le avec la pince. Serrez en tournant la vis en nylon vers la droite.

Figure 7 Placer et fixer le téléphone sur le support Les téléphones doivent être placés de manière à ce que les câbles USB se trouvent en périphérie du support de téléphone et que les caméras se trouvent près du centre du support.
- Utilisez un collier de serrage pour fixer le câble USB du téléphone à la plaque de fixation et le faire sortir de la boîte par le trou de sortie. Branchez l'autre extrémité du câble à l'hôte qui exécute le test.
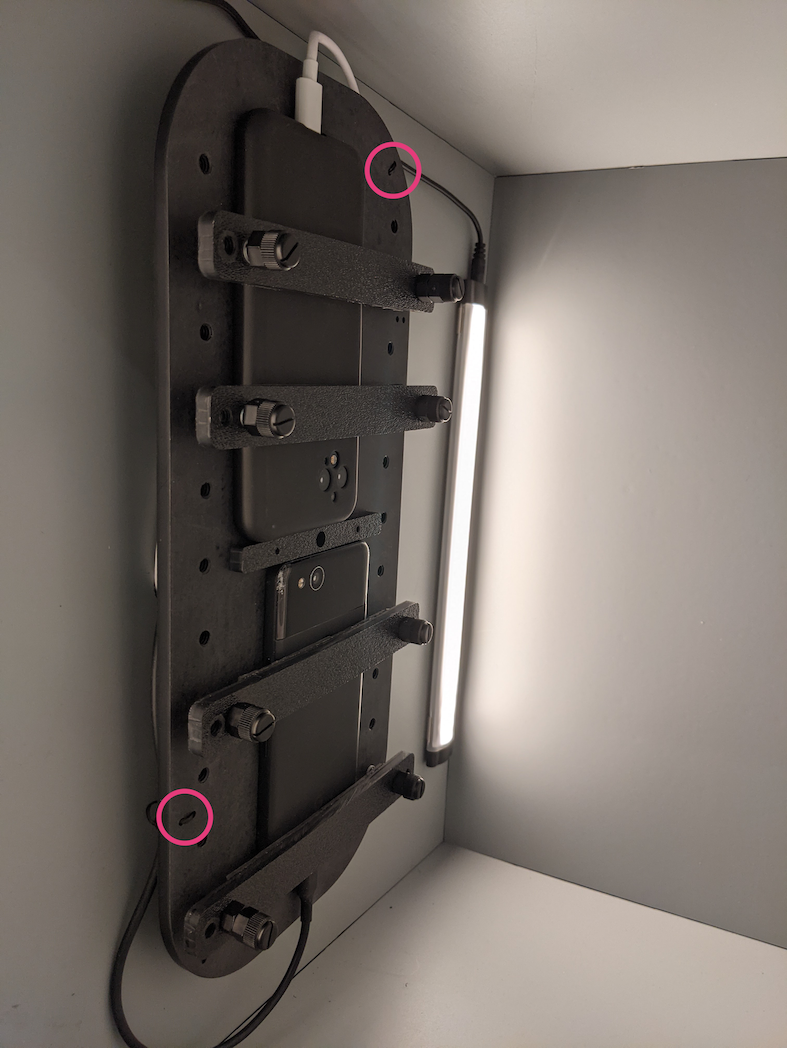
Figure 8 Câble USB du téléphone maintenu à l'accessoire à l'aide de serre-câbles
Étape 4: Exécuter le script de test
L'exécutable Python principal du script de test est le suivant:
python tools/run_all_tests.py device=ID camera=0 scenes=sensor_fusion rot_rig=default
Vous pouvez modifier la commande pour spécifier l'adresse réelle du rotateur à l'aide de:
rot_rig=VID:PID:CH
- Pour déterminer l'ID fournisseur (VID) et l'ID produit (PID), utilisez la commande Linux
lsusb. - Par défaut, les valeurs VID et PID sont définies sur
04d8etfc73avec le canal "1".
Plusieurs exécutions, différents formats
Pour effectuer plusieurs exécutions avec différents formats, vous pouvez utiliser un script différent (les résultats ne seront toutefois pas importés dans CtsVerifier.apk). Exemple de script de test:
python tools/run_sensor_fusion_box.py device=FA7831A00278 camera=0 rotator=default img_size=640,360 fps=30 test_length=7Problèmes d'autorisation
Pour résoudre les problèmes d'autorisation liés au contrôle du moteur via le port USB:
- Ajoutez le nom d'utilisateur de l'opérateur au groupe
dialoutà l'aide de:sudo adduser USERNAME dialout - Déconnectez l'opérateur.
- Connectez l'opérateur.