
센서 퓨전 테스트는 Android 기기, 특히 카메라 이미지 센서 및 자이로스코프용 센서의 타임스탬프 정확도를 측정합니다. 이 페이지에서는 센서 퓨전 테스트 및 센서 퓨전 상자를 처음 설정하는 방법을 단계별로 설명합니다.
동영상 튜토리얼
다음은 센서 퓨전 상자를 설정하는 방법에 관한 동영상 튜토리얼입니다.
필수 도구
시작하기 전에 다음 구성요소가 있는지 확인하세요.

- USB A-B 케이블
- USB A-C 케이블(테스트 전화용)
- 12V 2A 전원 코드(서보 제어 상자용)
- 12V 전원 코드(조명용, 스위치 포함)
- 5V 수-수 연결 케이블(조명용)
- 5V 수-암 변환 케이블(조명용)
1단계: 조명 연결
조명 연결 방법:
- 그림 2와 같이 수-수 케이블을 사용하여 하단에 있는 2개의 조명 끝을 연결합니다. 케이블이 작업에 방해되지 않도록 케이블을 상자의 하단에 고정합니다.
- 조명 케이블 출구 구멍에서 가까운 조명의 끝부분을 변환 케이블에 연결합니다.
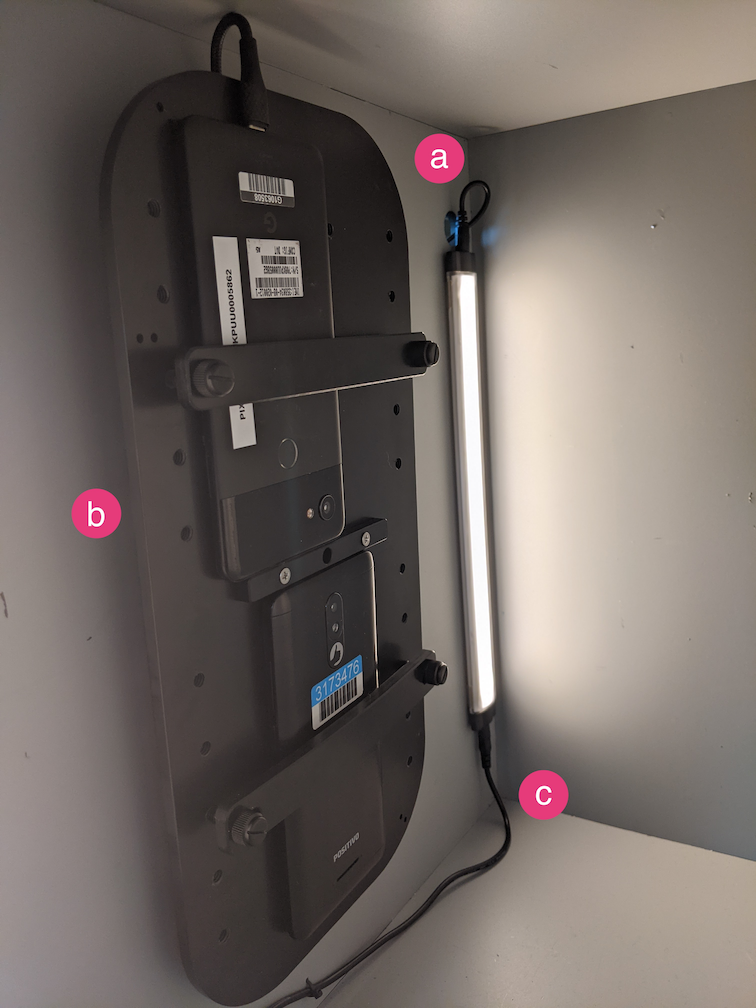
그림 2. 조명을 서로 연결하고 조명 하나를 변환 케이블에 연결합니다. - 조명 케이블 출구 구멍
- USB 케이블 출구 구멍
- 5V 수-수 변환 케이블
- 상자를 빠져나가는 원형 구멍에 변환 케이블의 연결되지 않은 끝부분을 끼운 다음 조명의 전원 케이블에 연결합니다.
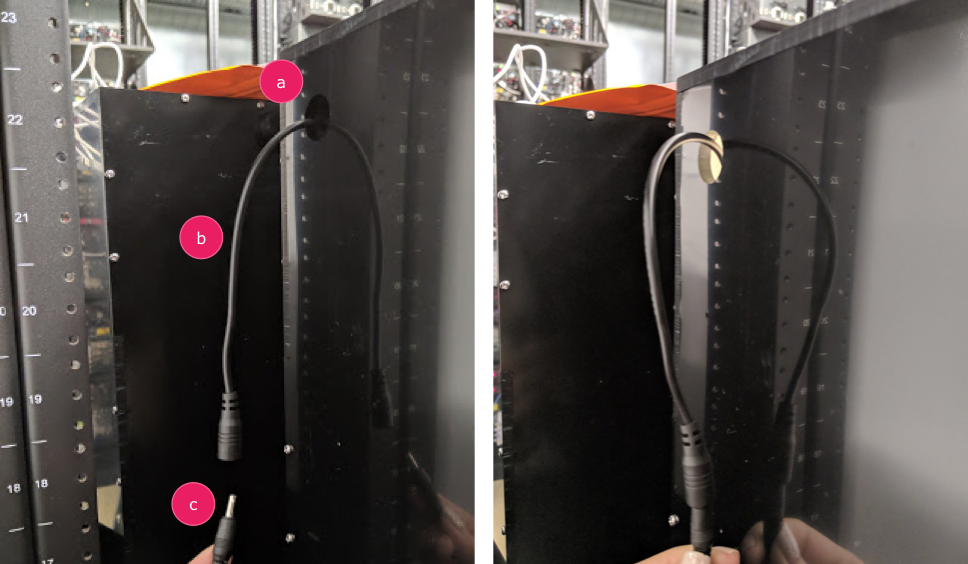
그림 3. 상자에서 나와 전원 케이블에 연결된 조명 변환 케이블 - 출구 구멍
- 변환 케이블
- 전원 케이블
2단계: 서보 연결
서보 부착 방법:
- 서보 커넥터를 서보 제어에 연결합니다. 라벨에 지정된 대로 색상에 맞게 커넥터를 삽입해야 합니다(Y = 노란색, R = 붉은색, B = 검은색). 잘못 삽입하면 모터가 손상될 수 있습니다. 코드가 너무 짧은 경우 서보 확장 케이블을 사용합니다.
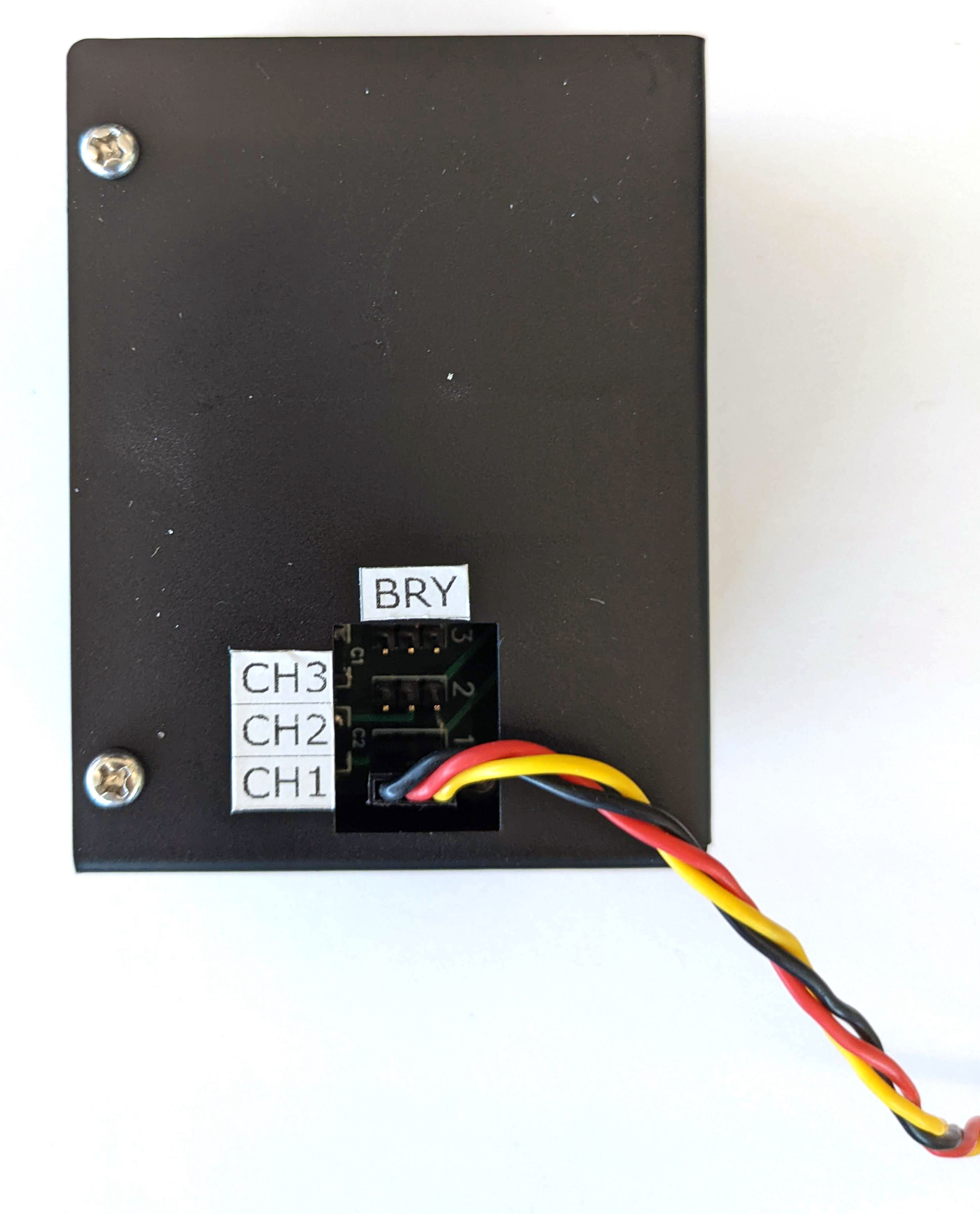
그림 4. 서보 제어 상자에 서보 연결 - 서보 제어를 전원 코드에 연결합니다(조명 및 서보 제어에는 별도의 전용 전원 공급 장치가 있음).

그림 5. 전용 전원 코드에 서보 제어 연결 - USB A-B 케이블을 사용하여 서보 제어 상자를 호스트(테스트를 실행하는 머신)에 연결합니다.
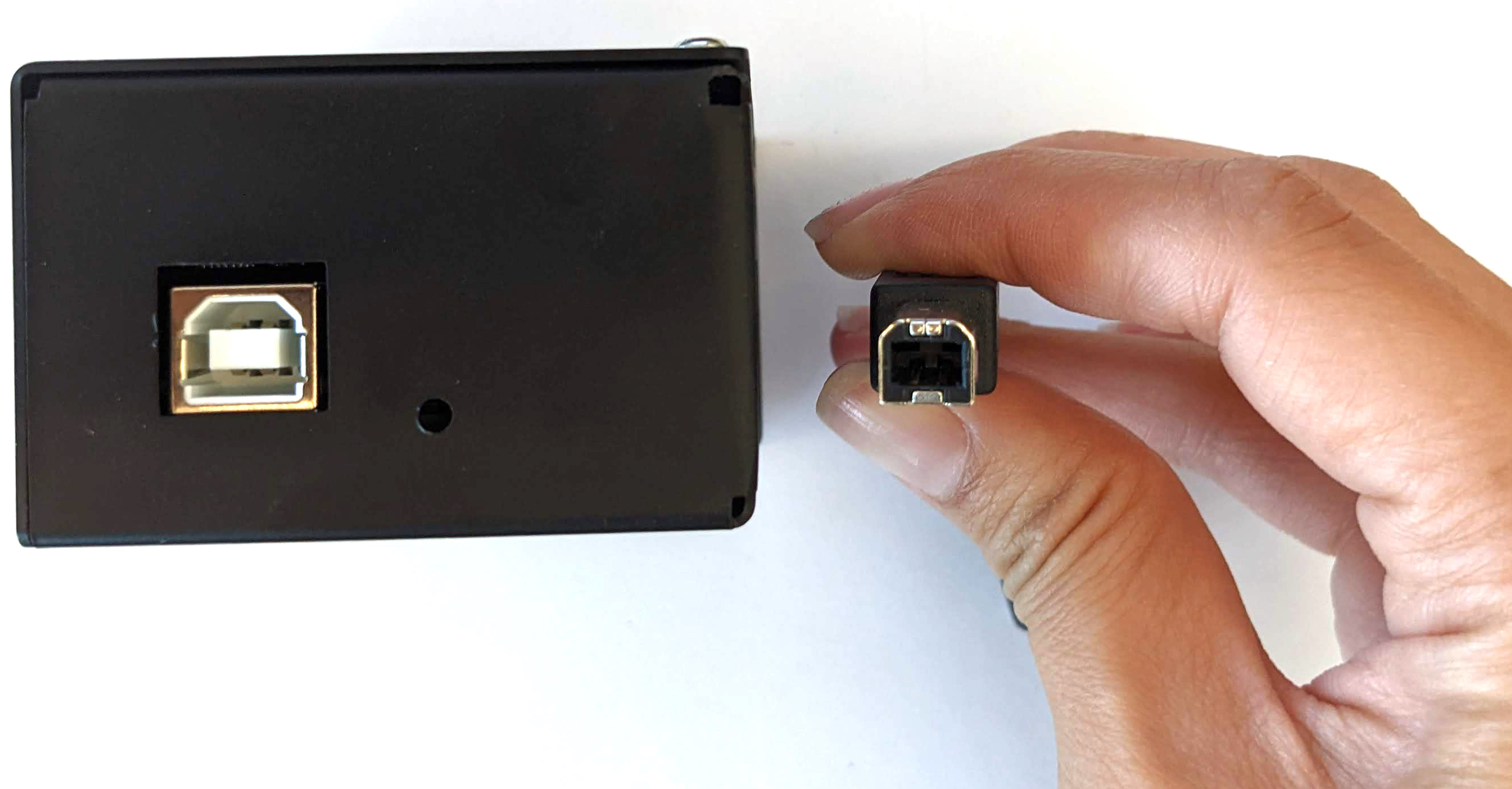
그림 6. 호스트 머신에 서보 제어 상자 연결
3단계: 휴대전화 연결
- 휴대전화를 고정 장치에 놓고 클램프로 고정합니다. 나일론 나사를 오른쪽으로 돌려서 조입니다.

그림 7. 휴대전화를 고정 장치에 놓고 클램프로 고정 USB 코드가 휴대전화 마운트 주변에 위치하고 카메라가 마운트 중앙과 근접하도록 휴대전화를 배치해야 합니다.
- 케이블 타이를 사용하여 휴대전화 USB 코드를 고정 장치 바닥에 고정하고 출구 구멍을 통해 상자 밖으로 빼냅니다. 코드의 반대쪽 끝을 테스트를 실행하는 호스트에 연결합니다.
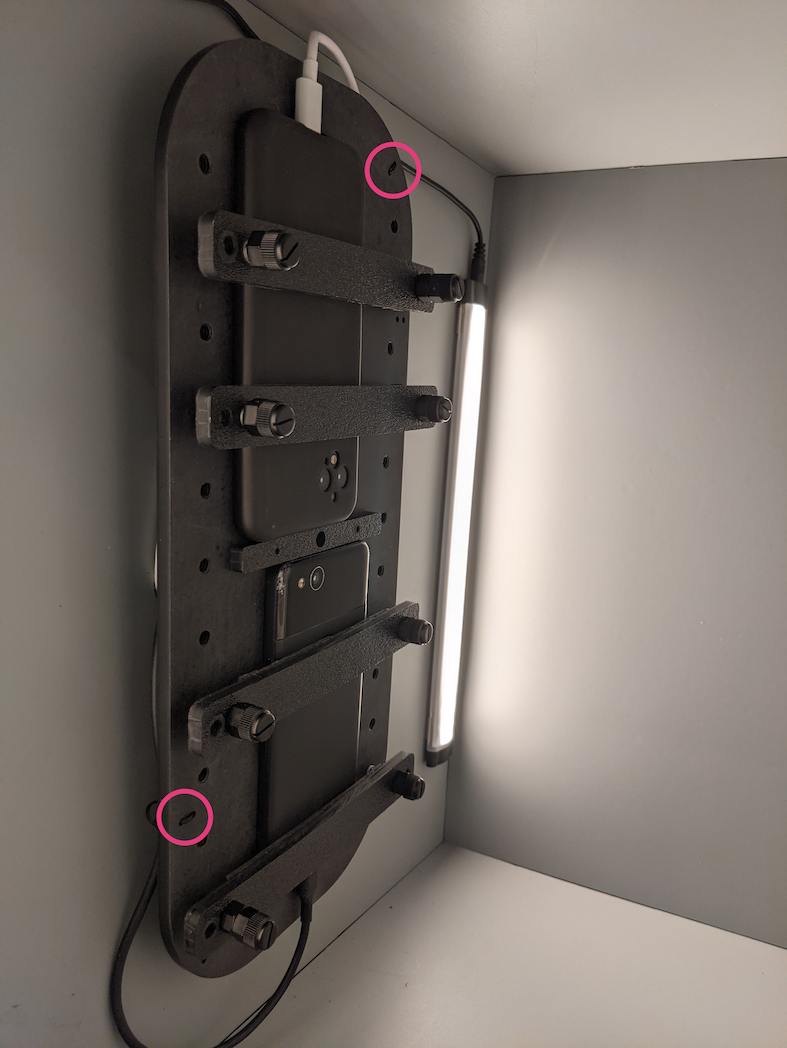
그림 8. 케이블 타이로 고정 장치에 고정된 휴대전화 USB 코드
4단계: 테스트 스크립트 실행
테스트 스크립트용 주요 Python 실행 파일:
python tools/run_all_tests.py device=ID camera=0 scenes=sensor_fusion rot_rig=default
명령을 수정하고 다음을 사용하여 실제 로테이터 주소를 지정할 수 있습니다.
rot_rig=VID:PID:CH
- 공급업체 ID(VID) 및 제품 ID(PID)를 확인하려면
lsusbLinux 명령어를 사용합니다. - 기본적으로 VID 및 PID는
04d8및fc73에 채널 '1'로 설정됩니다.
여러 형식으로 여러 번 실행
각기 다른 스크립트를 사용하여 여러 형식으로 여러 번 실행할 수 있습니다(하지만, 결과는 CtsVerifier.apk에 업로드되지 않음). 샘플 테스트 스크립트는 다음과 같습니다.
python tools/run_sensor_fusion_box.py device=FA7831A00278 camera=0 rotator=default img_size=640,360 fps=30 test_length=7권한 문제
USB 포트를 통해 모터 제어 관련 권한 문제를 해결하려면 다음을 따르세요.
- 다음을 사용하여 연산자 사용자 이름을
dialout그룹에 추가합니다.sudo adduser USERNAME dialout - 연산자를 로그아웃합니다.
- 연산자를 로그인합니다.