
Тест слияния датчиков измеряет точность временных меток датчиков устройств Android, в частности датчиков изображения камер и гироскопов. На этой странице представлены пошаговые инструкции по первой настройке теста Sensor Fusion и Sensor Fusion Box.
Видеоурок
Это видеоурок о том, как настроить блок Sensor Fusion.
Необходимые инструменты
Прежде чем приступить к работе, убедитесь, что у вас есть следующие компоненты:

- USB-кабель A-B
- Кабель USB A–C (для тестового телефона)
- Шнур питания 12 В, 2 А (для блока сервоуправления)
- Шнур питания 12В (для освещения, с выключателем)
- Соединительный кабель «папа-папа» 5 В (для освещения)
- Кабель-переходник 5 В «папа-мама» (для освещения)
Шаг 1. Подключите светильники
Для подключения фонарей:
- Используйте кабель «папа-папа» для соединения двух фонарей на нижних концах фонарей, как показано на рисунке 2. Закрепите кабель к нижней части коробки, чтобы он не мешал работе.
- Подключите конец фонаря ближе к выходному отверстию светового кабеля к переходному кабелю.
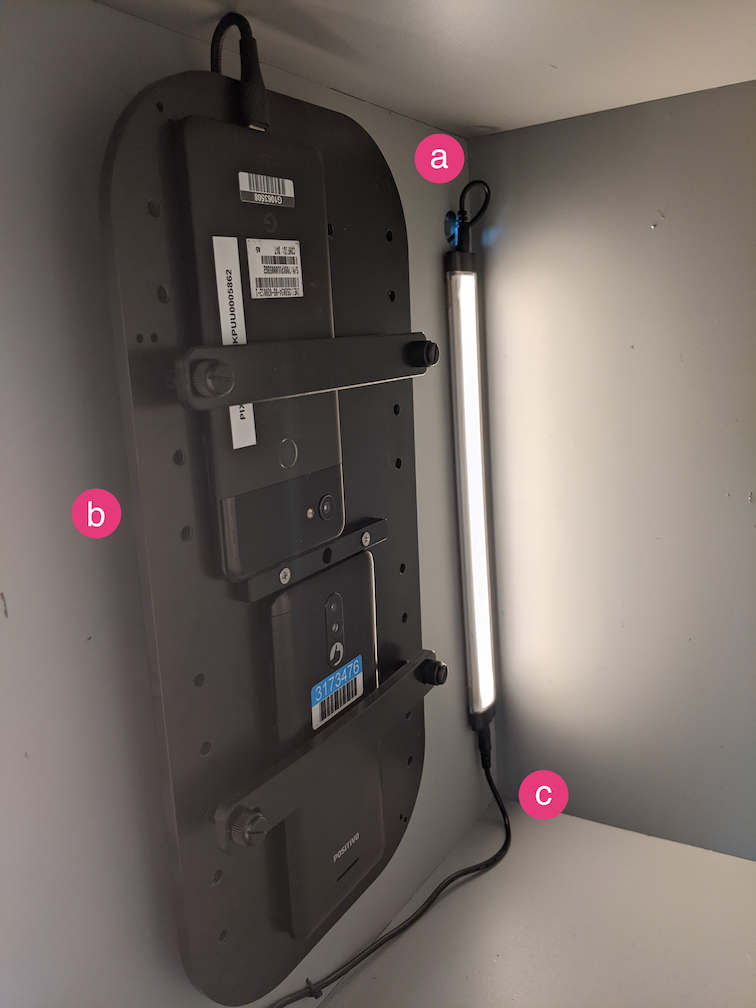
Рисунок 2. Соединение фонарей друг с другом и одного светильника с переходным кабелем - Выходное отверстие светового кабеля
- Выходное отверстие USB-кабеля
- Кабель-переходник 5 В «папа-папа»
- Пропустите неподключенный конец переходного кабеля через круглое отверстие, выходящее из коробки, затем подключите его к кабелю питания для освещения.
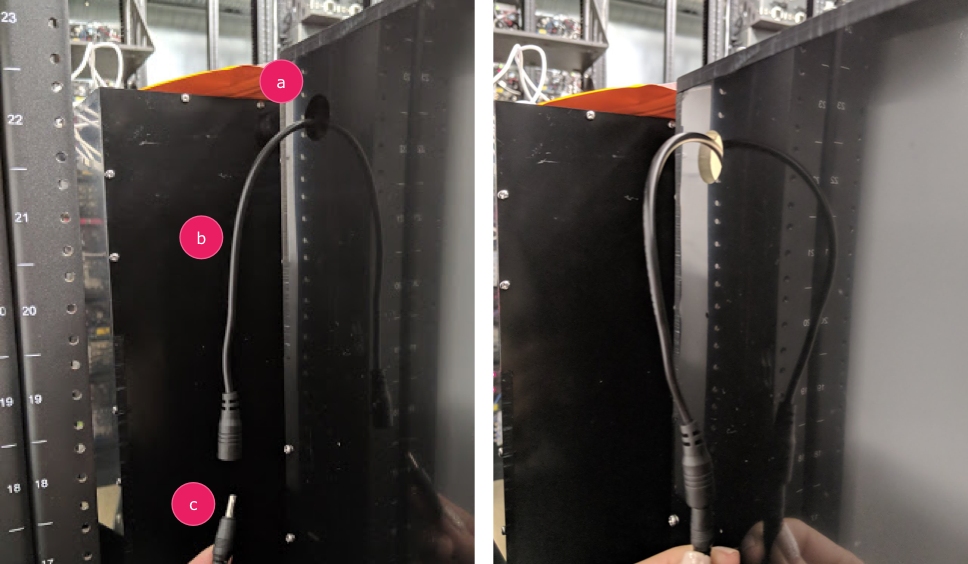
Рисунок 3. Кабель-переходник освещения, выходящий из коробки и подключающийся к силовому кабелю - Выходное отверстие
- Кабель-переходник
- Кабель питания
Шаг 2: Прикрепите сервопривод
Чтобы прикрепить сервопривод:
- Подключите разъем сервопривода к сервоуправлению. Обязательно вставляйте разъем, соответствующий цветам, указанным на маркировке (Y = желтый, R = красный, B = черный), поскольку изменение порядка может привести к повреждению двигателя. Если шнур слишком короткий, используйте удлинительный кабель для сервопривода .
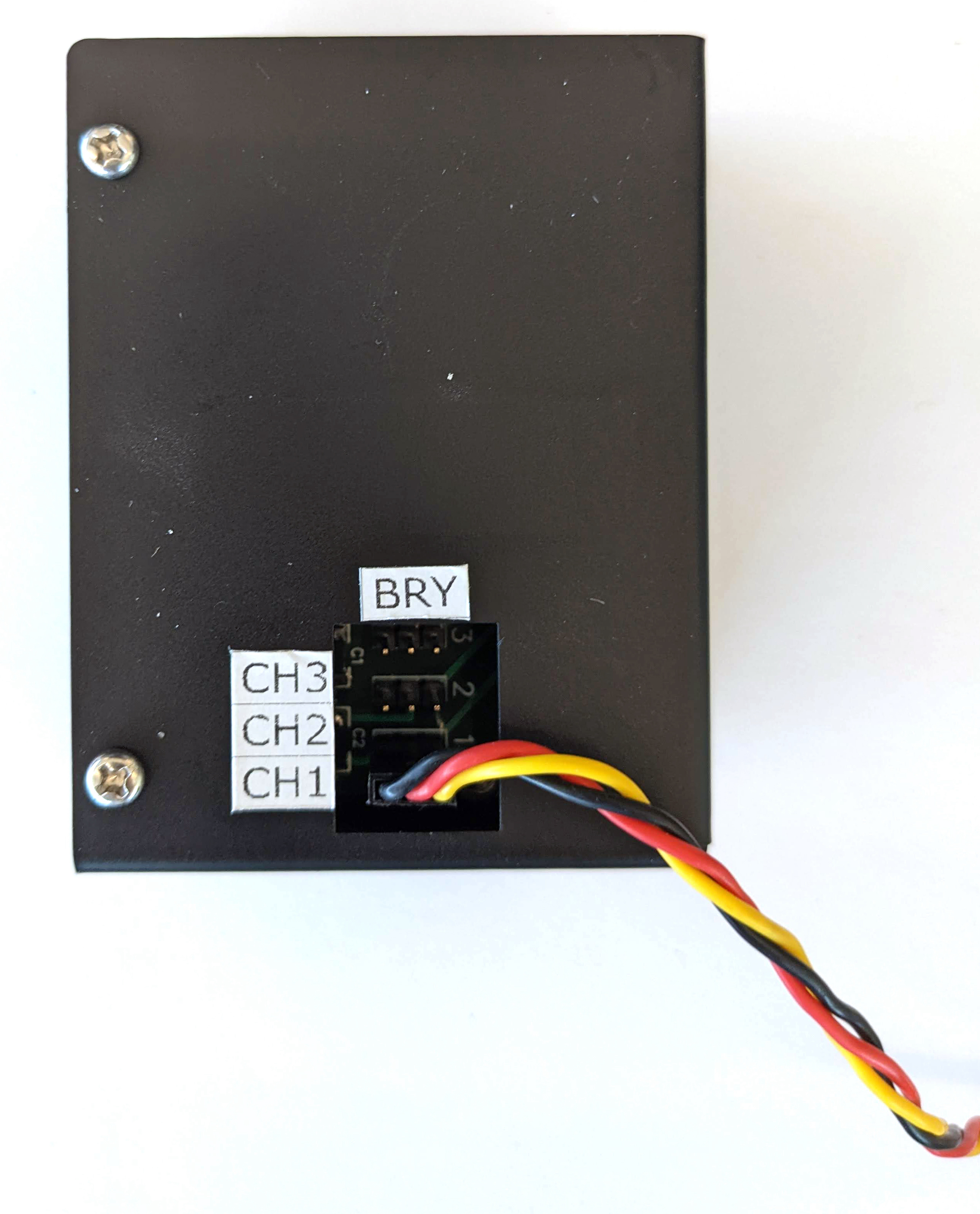
Рисунок 4. Подключение сервопривода к блоку управления сервоприводом - Подключите сервопривод с помощью шнура питания (освещение и сервопривод имеют независимые, выделенные источники питания).

Рис. 5. Подключение сервоуправления к выделенному шнуру питания. - Используйте кабель USB A–B для подключения блока сервоуправления к хосту (машине, на которой выполняется тест).
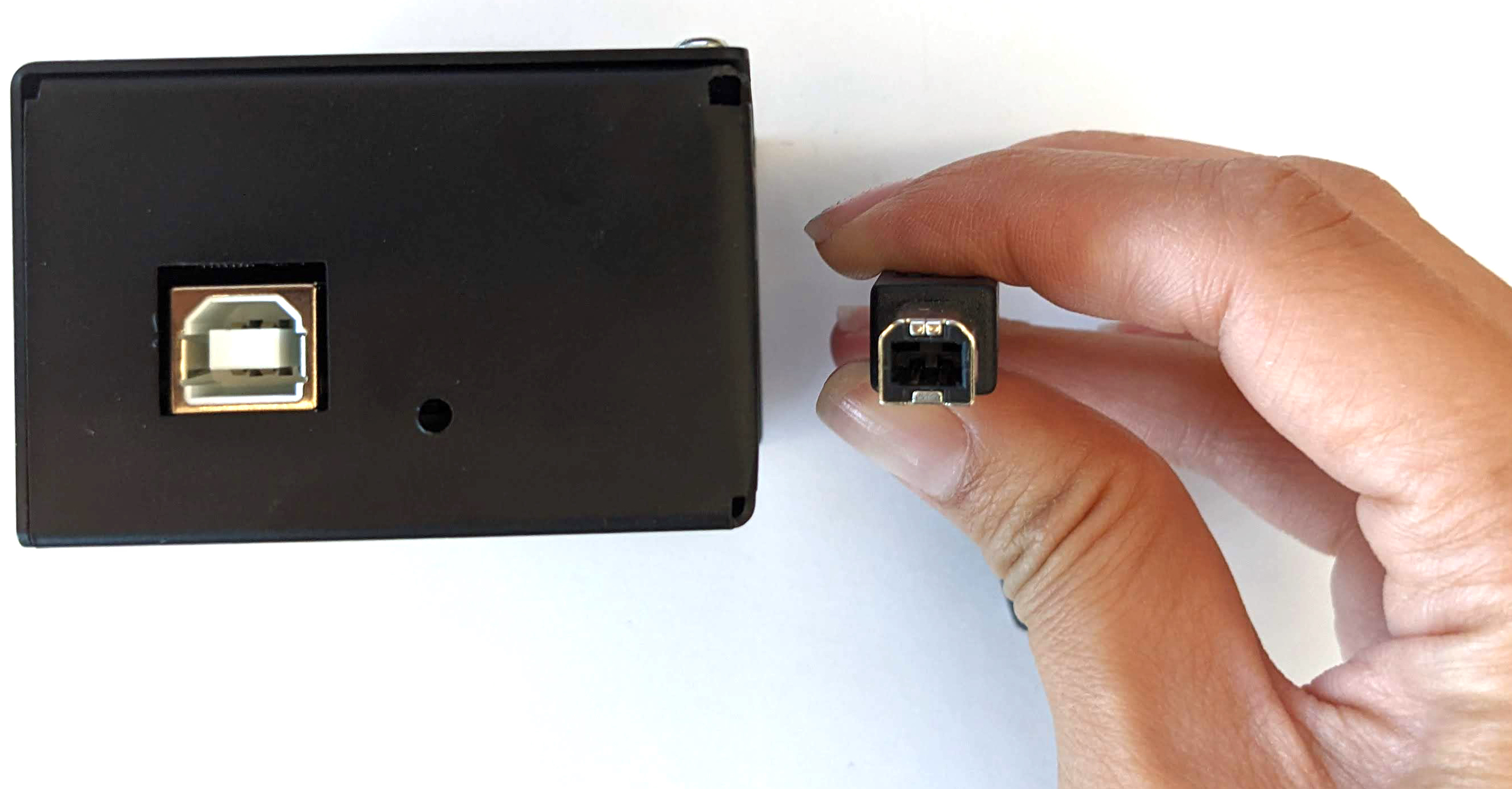
Рисунок 6. Подключение блока сервоуправления к хост-машине
Шаг 3. Подключите телефон
- Установите телефон на приспособление и зажмите его. Затяните, повернув нейлоновый винт вправо.

Рисунок 7. Размещение и крепление телефона на креплении. Телефоны следует размещать таким образом, чтобы USB-кабели располагались по периферии крепления для телефона, а камеры — ближе к центру крепления.
- С помощью стяжки прикрепите USB-кабель телефона к крепежной пластине и выведите его за пределы коробки через выходное отверстие. Подключите другой конец шнура к хосту, на котором выполняется тест.
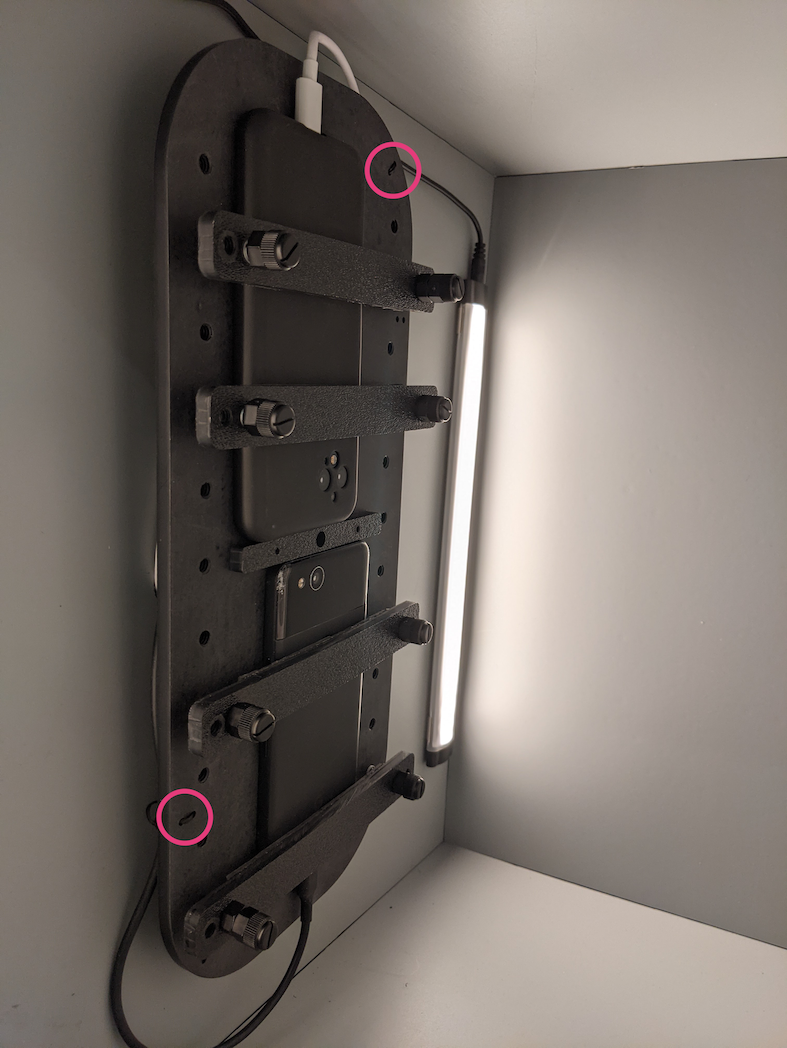
Рис. 8. USB-кабель телефона крепится к креплению с помощью застежек-молний.
Шаг 4. Запустите тестовый скрипт.
Основной исполняемый файл Python для тестового сценария:
python tools/run_all_tests.py device=ID camera=0 scenes=sensor_fusion rot_rig=default
Вы можете изменить команду, чтобы указать фактический адрес ротатора, используя:
rot_rig=VID:PID:CH
- Чтобы определить идентификатор поставщика (VID) и идентификатор продукта (PID), используйте команду Linux
lsusb. - По умолчанию VID и PID установлены на
04d8иfc73с каналом «1».
Несколько запусков, разные форматы
Чтобы выполнить несколько прогонов с разными форматами, вы можете использовать другой скрипт (однако результаты не будут загружены в CtsVerifier.apk ). Пример тестового сценария:
python tools/run_sensor_fusion_box.py device=FA7831A00278 camera=0 rotator=default img_size=640,360 fps=30 test_length=7Проблемы с разрешениями
Чтобы решить проблемы с разрешениями, связанными с управлением двигателем через порт USB:
- Добавьте имя пользователя оператора в группу
dialout, используя:sudo adduser USERNAME dialout - Выйдите из оператора.
- Войдите в систему оператора.