
Sensör birleştirme testi, Android cihazlardaki sensörlerin (özellikle kamera görüntü sensörleri ve jiroskoplar) zaman damgası doğruluğunu ölçer. Bu sayfada, Sensor Fusion testinin ve Sensor Fusion Box'ın ilk kez nasıl ayarlanacağına dair adım adım talimatlar verilmiştir.
Eğitim videosu
Bu, sensör füzyon kutusunu ayarlamayla ilgili bir eğitim videosudur.
Gerekli araçlar
Başlamadan önce aşağıdaki bileşenlere sahip olduğunuzdan emin olun:

- USB A - B kablosu
- USB A - C kablosu (test telefonu için)
- 12 V 2 A güç kablosu (servo kontrol kutusu için)
- 12 V güç kablosu (aydınlatma için, anahtarla)
- 5 V erkek-erkek bağlantı kablosu (aydınlatma için)
- 5 V erkek-dişi dönüştürücü kablo (aydınlatma için)
1. adım: Işıkları bağlayın
Işıkları bağlamak için:
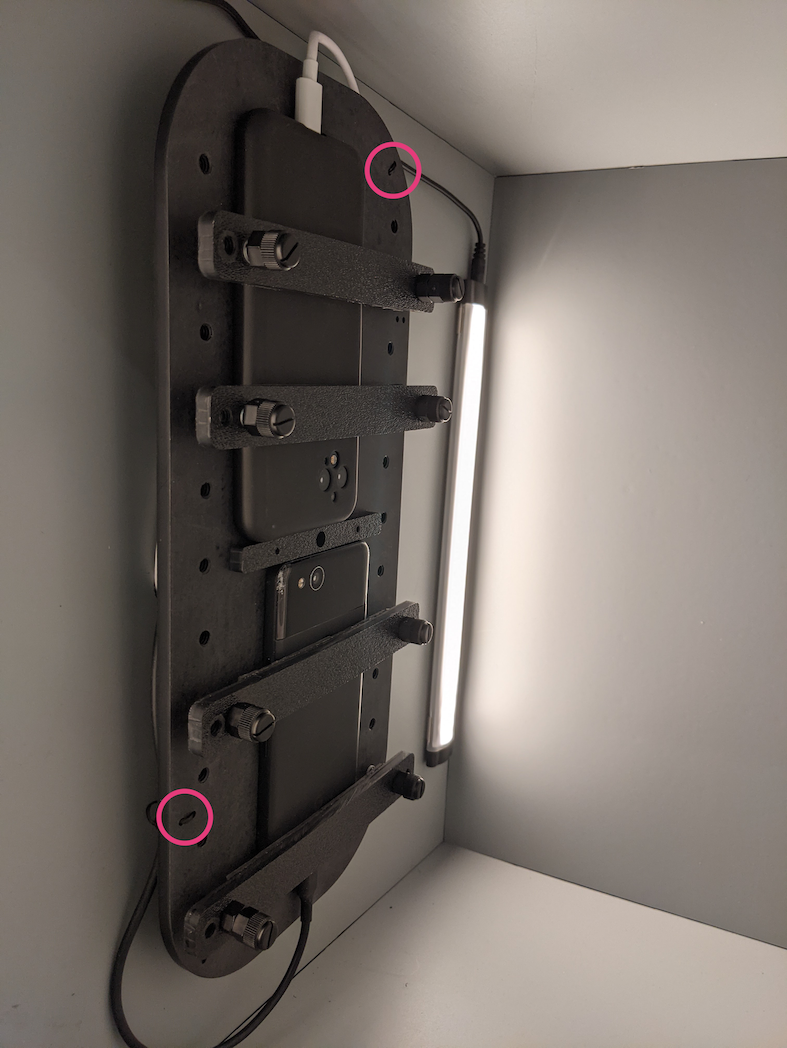
- Şekil 2'de gösterildiği gibi, iki ışığı alt uçlarından erkek-erkek kabloyla bağlayın. Kablo, işlemin yapılmasına engel olmamak için kutunun alt kısmına sabitlenmelidir.
- Işığın, ışık kablosunun çıkış deliğine daha yakın olan ucunu dönüşüm kablosuna bağlayın
Şekil 2. Işıkları birbirine ve bir lambayı dönüşüm kablosuna bağlama - Işık kablosu çıkış deliği
- USB kablosu çıkış deliği
- 5 V erkek-erkek dönüştürücü kablo
- Dönüşüm kablosunun bağlı olmayan ucunu kutudan çıkan yuvarlak delikten geçirin, ardından aydınlatma için güç kablosuna bağlayın.
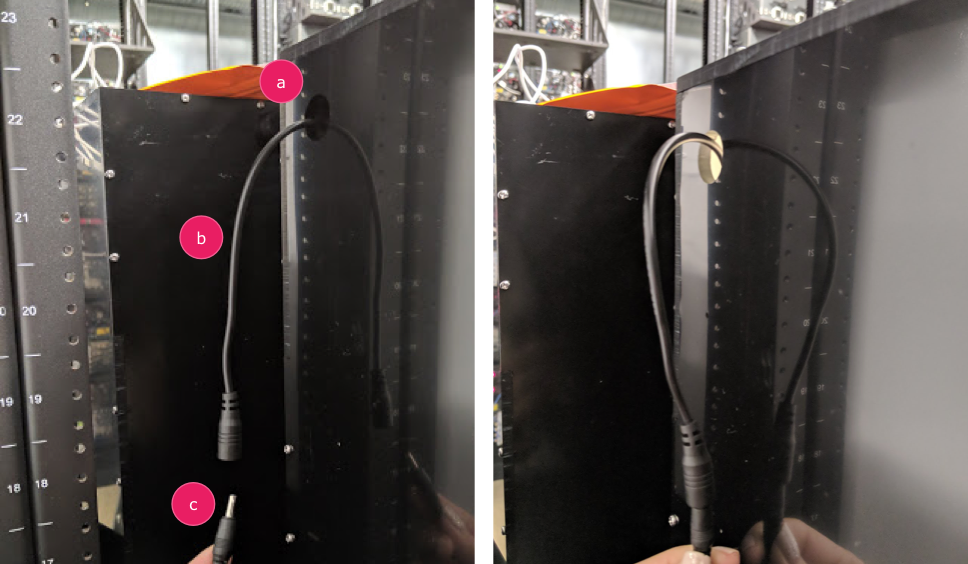
Şekil 3. Kutudan çıkan ve güç kablosuna bağlanan aydınlatma dönüşüm kablosu - Çıkış deliği
- Dönüşüm kablosu
- Güç kablosu
2. adım: Servoyu takın
Servoyu takmak için:
- Servo konnektörünü servo kontrolüne takın. Sıranın tersine çevrilmesi motora zarar verebileceğinden, konnektörü etiketlendiği gibi ilgili renklere (S = Sarı, K = Kırmızı, S = Siyah) göre yerleştirdiğinizden emin olun. Kablo çok kısaysa
servo uzatma kablosu kullanın.
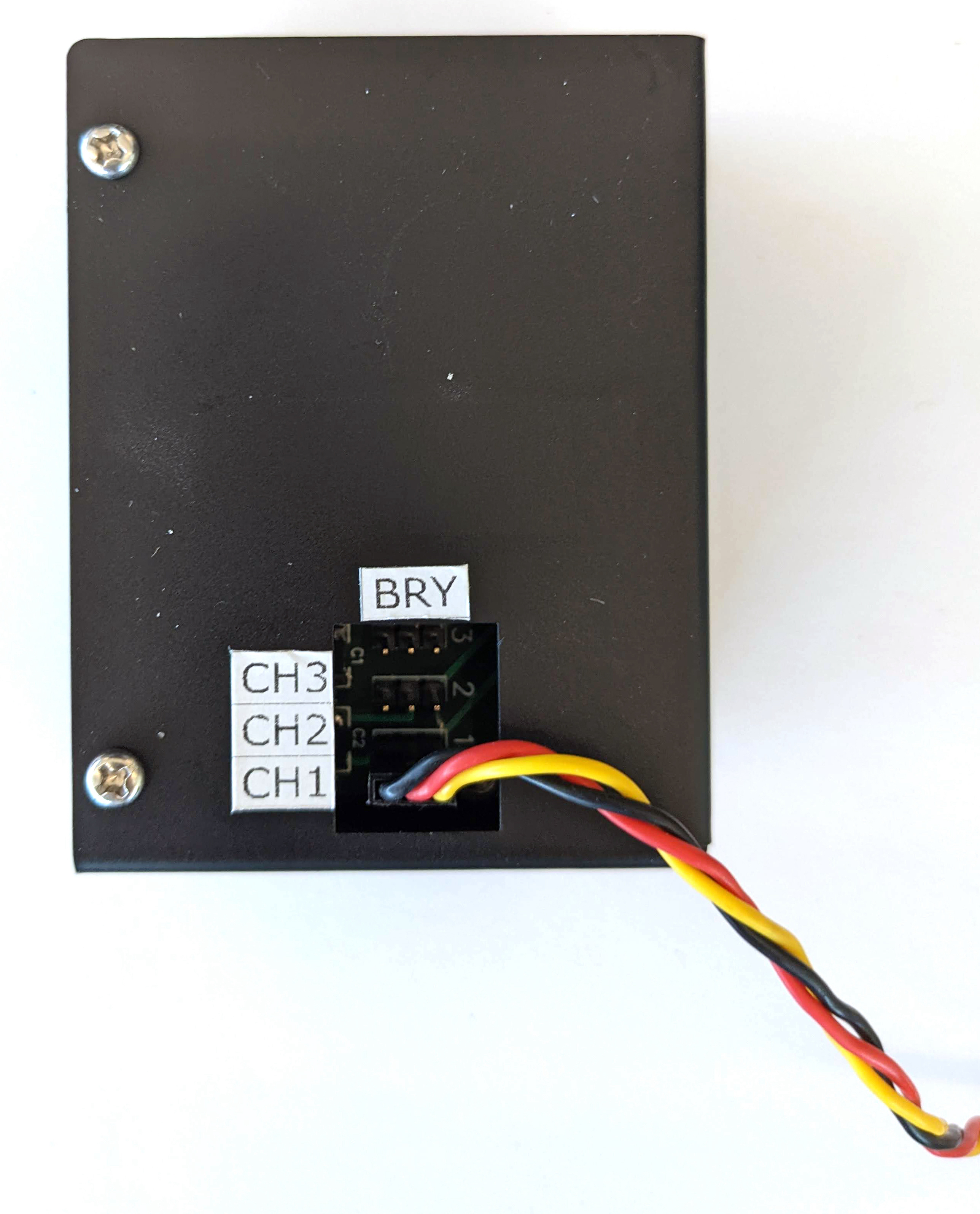
Şekil 4. Servo kontrol kutusuna bağlanan servo - Servo kontrolünü güç kablosuyla bağlayın (aydınlatma ve servo kontrolünün bağımsız, özel güç kaynakları vardır).

Şekil 5. Servo kontrolünü özel güç kablosuna bağlama - Servo kontrol kutusunu ana makineye (testi çalıştıran makineye) bağlamak için USB A - B kablosunu kullanın.
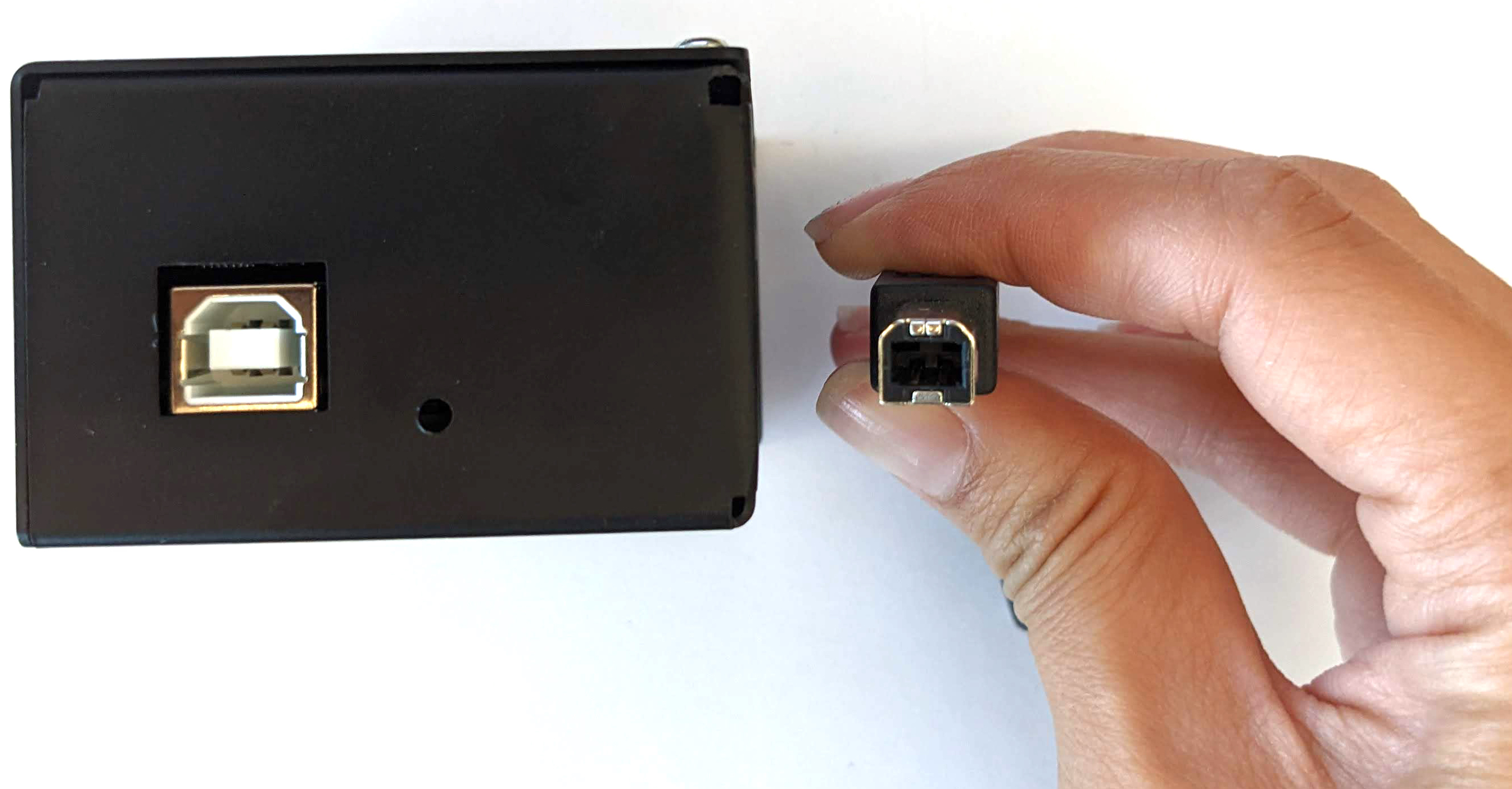
Şekil 6. Servo kontrol kutusunu ana makineye bağlama
3. Adım: Telefonu bağlayın
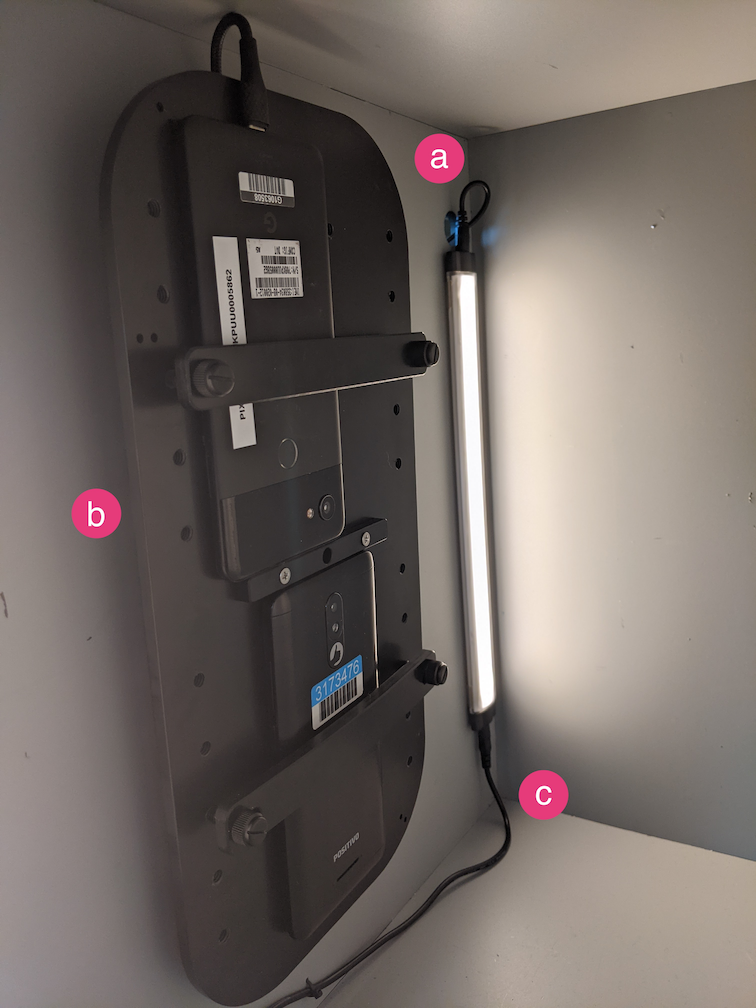
- Telefonu aparata yerleştirin ve kelepçeleyin. Naylon vidayı sağa çevirerek sıkın.

Şekil 7. Telefonu aparata yerleştirme ve sabitleme Telefonlar, USB kablolarının telefon montajının kenarına, kameraların ise montajın merkezine yakın bir yere gelecek şekilde yerleştirilmelidir.
- Telefon USB kablosunu, sabitleme plakasına sabitlemek ve çıkış deliğinden kutunun dışına çıkarmak için bir kablo bağı kullanın. Kablosun diğer ucunu testi çalıştıran ana makineye takın.
Şekil 8. Telefon USB kablosu, sabitleyiciye fermuar bağlarıyla tutturulmuş
4. Adım: Test komut dosyasını çalıştırın
Test komut dosyası için ana Python yürütülebilir dosyası:
python tools/run_all_tests.py device=ID camera=0 scenes=sensor_fusion rot_rig=default
Aşağıdakileri kullanarak komutu gerçek döndürücü adresini belirtecek şekilde değiştirebilirsiniz:
rot_rig=VID:PID:CH
- Tedarikçi firma kimliğini (VID) ve ürün kimliğini (PID) belirlemek için Linux
lsusbkomutunu kullanın. - Varsayılan olarak VID ve PID, "1" kanalıyla
04d8vefc73olarak ayarlanır.
Birden fazla çalıştırma, farklı biçimler
Farklı biçimlerde birden fazla çalıştırma yapmak için farklı bir komut dosyası kullanabilirsiniz (ancak sonuçlar CtsVerifier.apk'e yüklenmez). Örnek test komut dosyası:
python tools/run_sensor_fusion_box.py device=FA7831A00278 camera=0 rotator=default img_size=640,360 fps=30 test_length=7İzin sorunları
USB bağlantı noktası üzerinden motoru kontrol etmeyle ilgili izin sorunlarını çözmek için:
- Operatör kullanıcı adını
dialoutgrubuna eklemek için:sudo adduser USERNAME dialout - Operatörün oturumunu kapatın.
- Operatöre giriş yapın.