
تست همجوشی حسگر، دقت مهر زمانی سنسورها را برای دستگاههای اندرویدی، بهویژه سنسورهای تصویر دوربین و ژیروسکوپها اندازهگیری میکند. این صفحه دستورالعمل های گام به گام نحوه راه اندازی تست Sensor Fusion و Sensor Fusion Box را برای اولین بار ارائه می دهد.
آموزش تصویری
این یک آموزش تصویری در مورد نحوه تنظیم جعبه فیوژن سنسور است.
ابزار مورد نیاز
قبل از شروع، مطمئن شوید که اجزای زیر را دارید:

- کابل USB A به B
- کابل USB A به C (برای تلفن آزمایشی)
- سیم برق 12 ولت 2 آمپر (برای جعبه کنترل سروو)
- سیم برق 12 ولت (برای روشنایی، دارای سوئیچ)
- کابل اتصال نر-نر 5 ولت (برای روشنایی)
- کابل تبدیل زن به زن 5 ولت (برای روشنایی)
مرحله 1: چراغ ها را وصل کنید
برای اتصال چراغ ها:
- همانطور که در شکل 2 نشان داده شده است، از کابل نر-نر برای اتصال دو چراغ در انتهای پایین چراغ ها استفاده کنید. کابل را به پایین جعبه محکم کنید تا کابل در کار اختلال ایجاد نکند.
- انتهای چراغ را نزدیکتر به سوراخ خروجی کابل نور به کابل تبدیل وصل کنید
شکل 2. اتصال چراغ ها به یکدیگر و یک چراغ به کابل تبدیل - سوراخ خروجی کابل نور
- سوراخ خروجی کابل USB
- کابل تبدیل نر به نر 5 ولت
- انتهای غیر متصل کابل تبدیل را از سوراخ گردی که از جعبه خارج می شود عبور دهید، سپس آن را برای روشنایی به کابل برق وصل کنید.
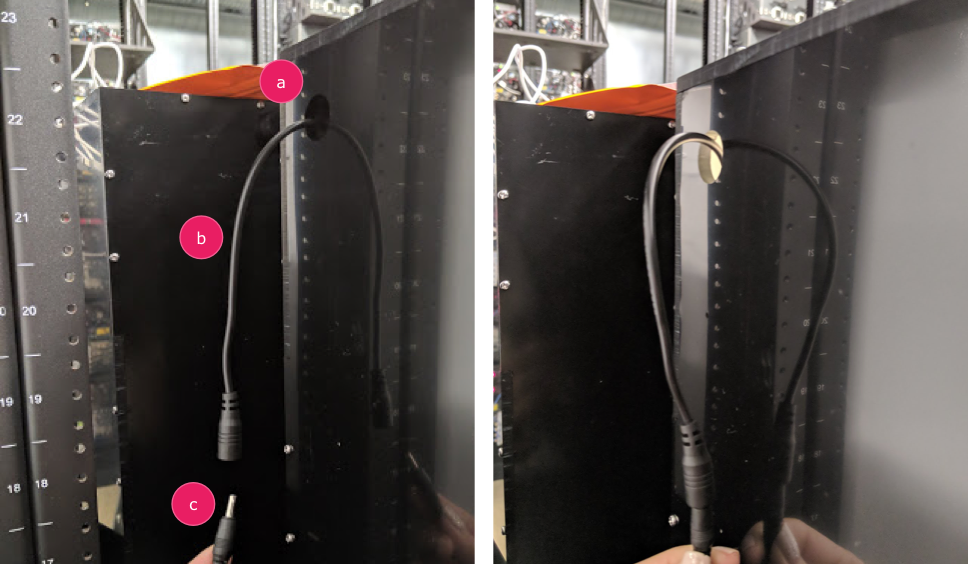
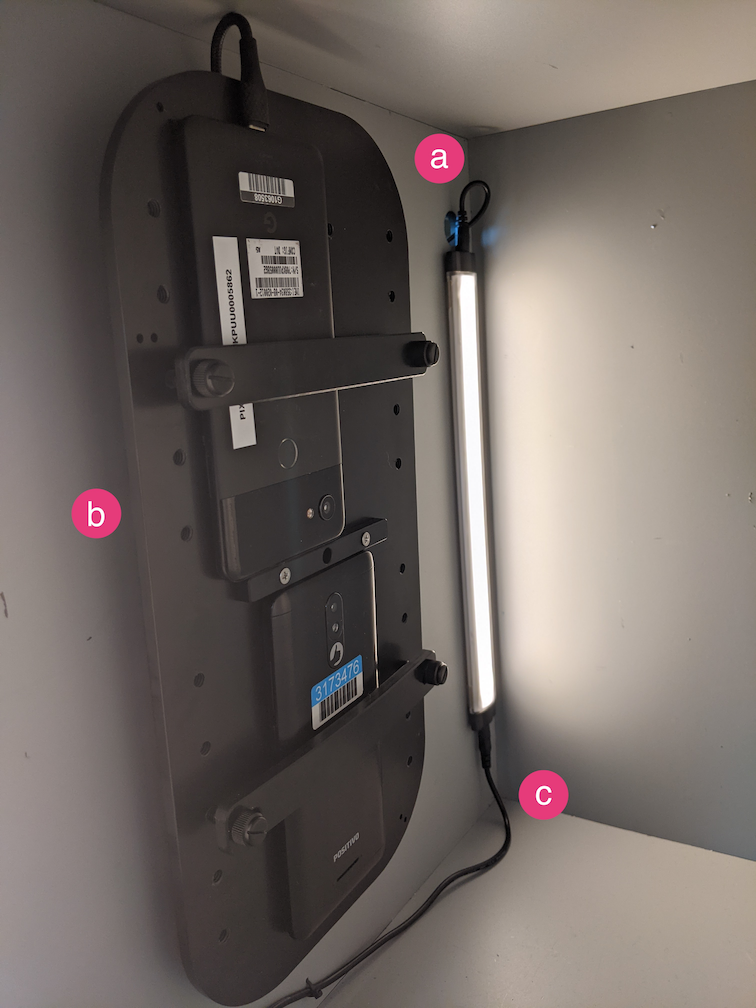
شکل 3. کابل تبدیل روشنایی خروجی از جعبه و اتصال به کابل برق - سوراخ خروجی
- کابل تبدیل
- کابل برق
مرحله 2: سروو را وصل کنید
برای اتصال سروو:
- کانکتور سروو را به کنترل سروو وصل کنید. مطمئن شوید که کانکتور را با رنگ های مربوطه مطابق با برچسب (Y = زرد، R = قرمز، B = سیاه) وارد کنید، زیرا تغییر ترتیب ممکن است به موتور آسیب برساند. اگر سیم خیلی کوتاه است، از کابل توسعه سروو استفاده کنید.

شکل 4. اتصال سروو به جعبه کنترل سروو - سروو کنترل را با سیم برق آن وصل کنید (روشنایی و کنترل سروو دارای منابع تغذیه مستقل و اختصاصی هستند).

شکل 5. اتصال سروو کنترل به سیم برق اختصاصی آن - از کابل USB A به B برای اتصال جعبه کنترل سروو به میزبان (دستگاهی که آزمایش را انجام می دهد) استفاده کنید.
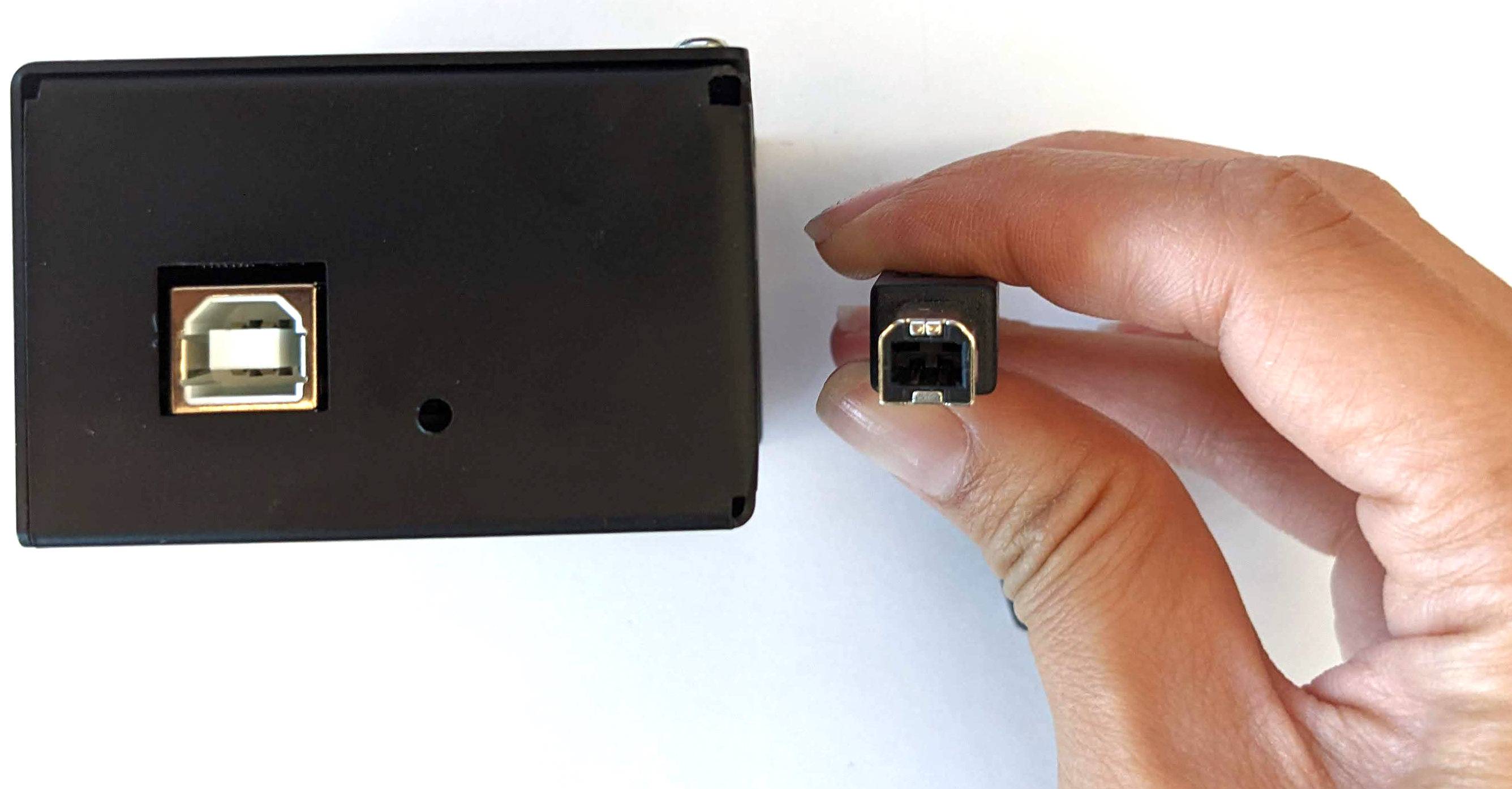
شکل 6. اتصال جعبه کنترل سروو به دستگاه میزبان
مرحله 3: تلفن را وصل کنید
- گوشی را روی فیکسچر قرار دهید و آن را محکم کنید. با چرخاندن پیچ نایلونی به سمت راست سفت کنید.

شکل 7. قرار دادن و بستن گوشی روی فیکسچر تلفنها باید به گونهای قرار بگیرند که کابلهای USB در حاشیه پایه تلفن و دوربینها نزدیک مرکز پایه قرار گیرند.
- از یک زیپ برای نگه داشتن سیم USB تلفن روی صفحه ثابت استفاده کنید و آن را به بیرون از جعبه از سوراخ خروج هدایت کنید. سر دیگر سیم را به میزبانی که آزمایش را انجام می دهد وصل کنید.
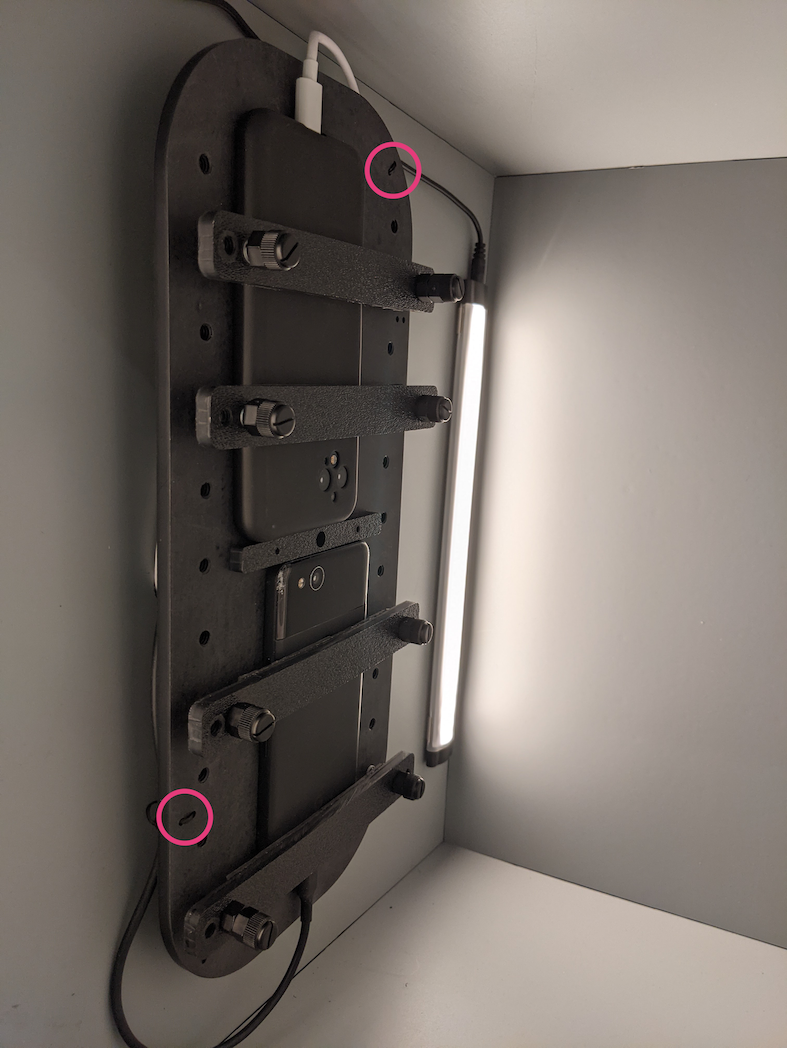
شکل 8. سیم USB تلفن با زیپ متصل شده است
مرحله 4: اسکریپت تست را اجرا کنید
اصلی ترین پایتون قابل اجرا برای اسکریپت تست:
python tools/run_all_tests.py device=ID camera=0 scenes=sensor_fusion rot_rig=default
می توانید با استفاده از این دستور، آدرس روتاتور واقعی را مشخص کنید:
rot_rig=VID:PID:CH
- برای تعیین شناسه فروشنده (VID) و شناسه محصول (PID)، از دستور Linux
lsusbاستفاده کنید. - به طور پیش فرض، VID و PID روی
04d8وfc73با کانال "1" تنظیم شده اند.
اجراهای متعدد، فرمت های مختلف
برای اجرای چندین اجرا با فرمتهای مختلف، میتوانید از یک اسکریپت متفاوت استفاده کنید (با این حال، نتایج در CtsVerifier.apk آپلود نمیشوند). نمونه اسکریپت تست:
python tools/run_sensor_fusion_box.py device=FA7831A00278 camera=0 rotator=default img_size=640,360 fps=30 test_length=7مسائل مربوط به مجوز
برای حل مشکلات مجوز مربوط به کنترل موتور از طریق درگاه USB:
- با استفاده از: نام کاربری اپراتور را به گروه
dialoutاضافه کنید:sudo adduser USERNAME dialout - از اپراتور خارج شوید.
- وارد اپراتور شوید