
בדף הזה מוסבר איך להרכיב את בקר Android 13, ששולט בתנועה של מתקן בדיקה של שילוב חיישנים ובתאורה של ITS-in-a-box. בדיקת שילוב החיישנים היא חלק מחבילת הבדיקות של תמונות המצלמה (Camera ITS) בחבילת הבדיקות לתאימות (CTS). בקר Android 13 מאפשר אוטומציה על ידי שליטה בתאורה של המערכת ובמנוע סרוו לסצנות בדיקה שדורשות סיבוב ושליטה בתאורה.
סקירה כללית על בקרים ב-Android 13
ITS-in-a-box מספק סביבת בדיקה עקבית עם מרחק קבוע בין הטאבלט לבדיקה לבין הטלפון לבדיקה, בנוסף לתאורה עקבית ללא מקור אור חיצוני. בקר Android 13 מבצע אוטומציה של בקרת הסרוו ובקרת התאורה, ומבטל את הצורך לסובב ידנית את המכשיר הנבדק לבדיקות של סצנות שילוב חיישנים, ולהפעיל ולכבות ידנית את האורות לבדיקות של תאורה מבוקרת.
שליטה ב-Servo ובתאורה במתקני בדיקה
מערכת הבדיקה של שילוב החיישנים מספקת תנועה קבועה של הטלפון לבדיקה שניתנת לשחזור. הטלפון מסובב מול מטרה בצורת לוח שחמט כדי לאפשר צילום תמונות כשהטלפון נמצא במצבים שונים. במקרה של test_sensor_fusion, הסרוו מסובב את הטלפון סביב מרכז ציר המצלמה ב-90 מעלות ואז מחזיר אותו למצב הקודם תוך כ-2 שניות. במקרה של test_video_stabilization, הסרוו מסובב את הטלפון סביב מרכז הציר של המצלמה ב-10 מעלות, ואז חוזר שוב ושוב כדי לחקות את תנועת הטלפון בזמן צילום סרטון בהליכה. איור 1 מציג שני טלפונים שנעים במתקן בדיקה של שילוב חיישנים. איור 2 מציג טלפון אחד שזז במתקן בדיקה של שילוב חיישנים.
איור 1. תנועת הטלפון במתקן הבדיקה עבור test_sensor_fusion

איור 2. תנועת הטלפון במתקן הבדיקה עבור test_video_stabilization
שליטה במנוע סרוו
מנועי הסרוו האנלוגיים במתקן הבדיקה הם מנועי סרוו מיקומיים שמבוקרים באמצעות אפנון רוחב הפולס (PWM). דוגמה טיפוסית לבקרת מיקום מוצגת באיור 3. האות של הבקרה הוא מחזורי עם מחזור של 20 ms. שינוי רוחב הפולס לרוחב המינימלי מזיז את המנוע למצב ניטרלי, ושינוי רוחב הפולס לרוחב המקסימלי מזיז את המנוע ב-180 מעלות בכיוון השעון.
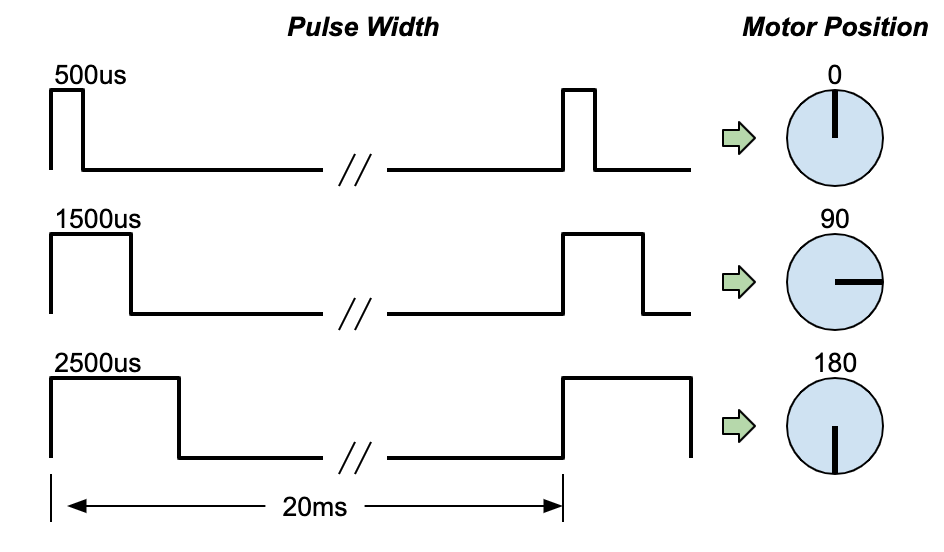
איור 3. תיאור אופייני של בקרת סרוו
שליטה בתאורה
כדי לשלוט בתנועת מנוע הסרוו ובאורות באמצעות מחשב מארח, נדרש חיבור USB למתקן הבדיקה של שילוב החיישנים. בקר Android 13 משתמש בלוח Arduino UNO R3 שמחובר באמצעות USB עם לוח ניתוב בהתאמה אישית (או shield) שמותקן מעליו. בקר Android 13 יכול לשלוט בעד שלושה סרוו של מכשירי סיבוב של חיישני מיזוג, ועד שלושה מערכות תאורה של ITS-in-a-box או מכשיר אחד של חיישני מיזוג ממחשב מארח יחיד.
בבקר Android 13 מגרסה 3.0, המשתמשים יכולים להשבית את האיפוס האוטומטי כשפותחים את היציאה הטורית של Arduino דרך USB. הפונקציה auto-reset מופעלת כשהבקר מחובר למארח אחר או כשהוא בשימוש לתרחישי בדיקה אחרים. המשתמשים יכולים להפעיל או להשבית את האיפוס האוטומטי באמצעות מתג פיזי בבקר.
בקר Android 13 יכול לפעול עם כל Camera ITS-in-a-box. אפשר לחבר את בקר Android 13 לכל Camera ITS-in-a-box (RFoV, WFoV, Modular) או ל-Sensor Fusion box כדי לבצע בדיקות עם שליטה בתאורה. מ-Android 15, כל הבדיקות של בקרת התאורה כלולות ב-scene_flash ואפשר להריץ אותן באמצעות התיבה של Sensor Fusion, חוץ מ-scene_low_light, שדורשת טאבלט להצגת התרשים וצריך להריץ אותה באמצעות Camera ITS-in-a-box.
בבדיקות של scene_flash ושל scene_low_light, נדרשת סביבה חשוכה עם אורות כבויים כדי להפעיל את פונקציית הפלאש האוטומטי בטלפונים שנבדקים. איור 4 מראה את האורות ב-ITS-in-a-box כשהם נדלקים ונכבים על ידי בקר Android 13.
איור 4. האורות כובו והודלקו בשביל test_auto_flash
היסטוריית גרסאות
בטבלה הבאה מתואר היסטוריית הגרסאות של בקר Android 13, ומופיעים קישורים להורדה של כל גרסה של קובצי הייצור.
| תאריך | Revision | הורדת קובץ הפקה | יומן שינויים |
|---|---|---|---|
| אוגוסט 2024 | 3.0 |
|
|
| דצמבר 2022 | 2.2 |
|
|
| מרץ 2022 | 1 |
|
הגדרת שלט ב-Android 13
בקטע הזה מוסבר איך מגדירים בקר Android 13.
רכיבים נדרשים
אפשר לרכוש את בקר Android 13 דרך אחד מהספקים המוסמכים שלנו, או לבנות את הבקר בעצמכם. קובץ הייצור מורכב מקובץ PCB Gerber, מכתב הכמויות (BOM) של ה-PCB, ממידע על מיקום ה-PCB ומקובץ STEP של המארז. כדי להוריד את קובץ הייצור, אפשר לעיין בטבלה שבקטע היסטוריית הגרסאות.
אם אתם בונים בקר משלכם, אתם צריכים לוח Arduino UNO R3. אם רוכשים את בקר דרך ספק מוסמך, ה-Arduino כלול.
מארז הבקרה של Android 13 הוא רכיב אופציונלי אבל מומלץ, שמגן על הבקר וחוסם יציאות USB שלא בשימוש כדי למנוע שגיאות בהגדרה. כדי לקבל פרטים על התמחור והאפשרויות של הבקר, צריך לפנות לספק מוסמך.
תהליך ההגדרה
כדי להגדיר את בקר Android 13, מבצעים את השלבים הבאים:
מחברים מתאמי 12V (לתאורה) ו-5V (לסרוו) לשקעי החשמל המתאימים (איור 5).
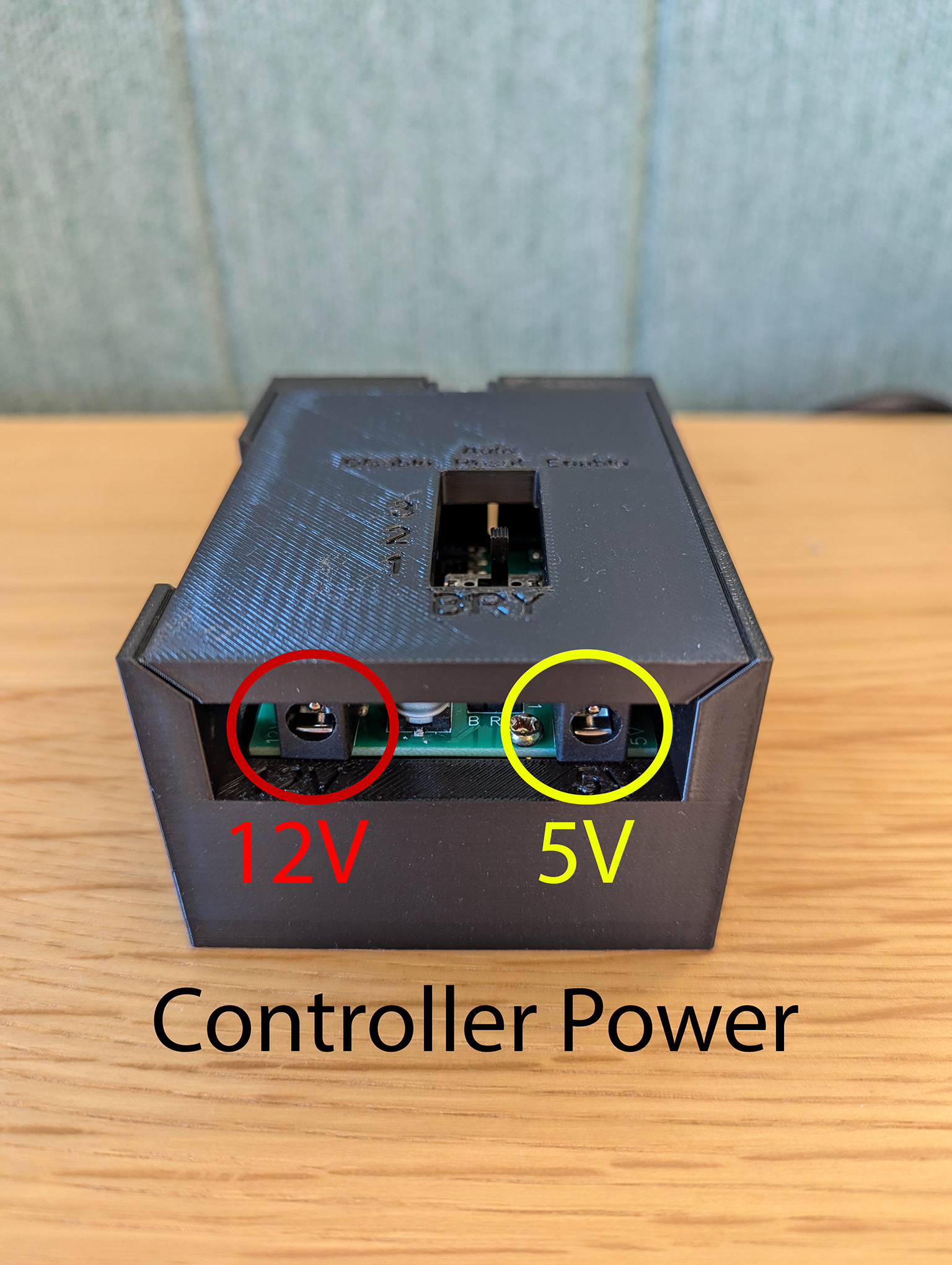
איור 5. מיקום מתאם המתח
מחברים את האורות של ITS-in-a-box או Sensor Fusion לאחד משקעי הפלט של ערוץ התאורה (איור 6). בהתאם לשימוש בצילינדר של מקור האור, משתמשים במתאם לפי הצורך (איור 7).

איור 6. מיקום הפלט של ערוצי התאורה

איור 7. מתאם שמחבר את החשמל של התאורה לבקר
כדי להגדיר את הסצנות של שילוב החיישנים, מחברים את הסרוו לאחד מראשי החיבור של ערוץ הסרוו.

איור 8. מיקום החיבור של Servo
בשלטים מגרסה 3.0, כשמחברים את השלט למארח חדש, צריך להגדיר את מתג האיפוס האוטומטי למצב
Enable.בגרסה 3.0, בבקר יש מתג איפוס אוטומטי שאפשר להפעיל או להשבית. במהלך הבדיקה, מומלץ להגדיר את המתג לאיפוס אוטומטי למצב
Disableכדי למנוע את כיבוי כל הנורות לרגע בתחילת כל בדיקה, בזמן ש-its_base_testיוצר תקשורת עם בקר Arduino. זה חשוב במיוחד כשמריצים בדיקות במקביל (ITS פועלת בו-זמנית עם מערכת התאורה של מתקן הבדיקה שמחוברת לאותו בקר).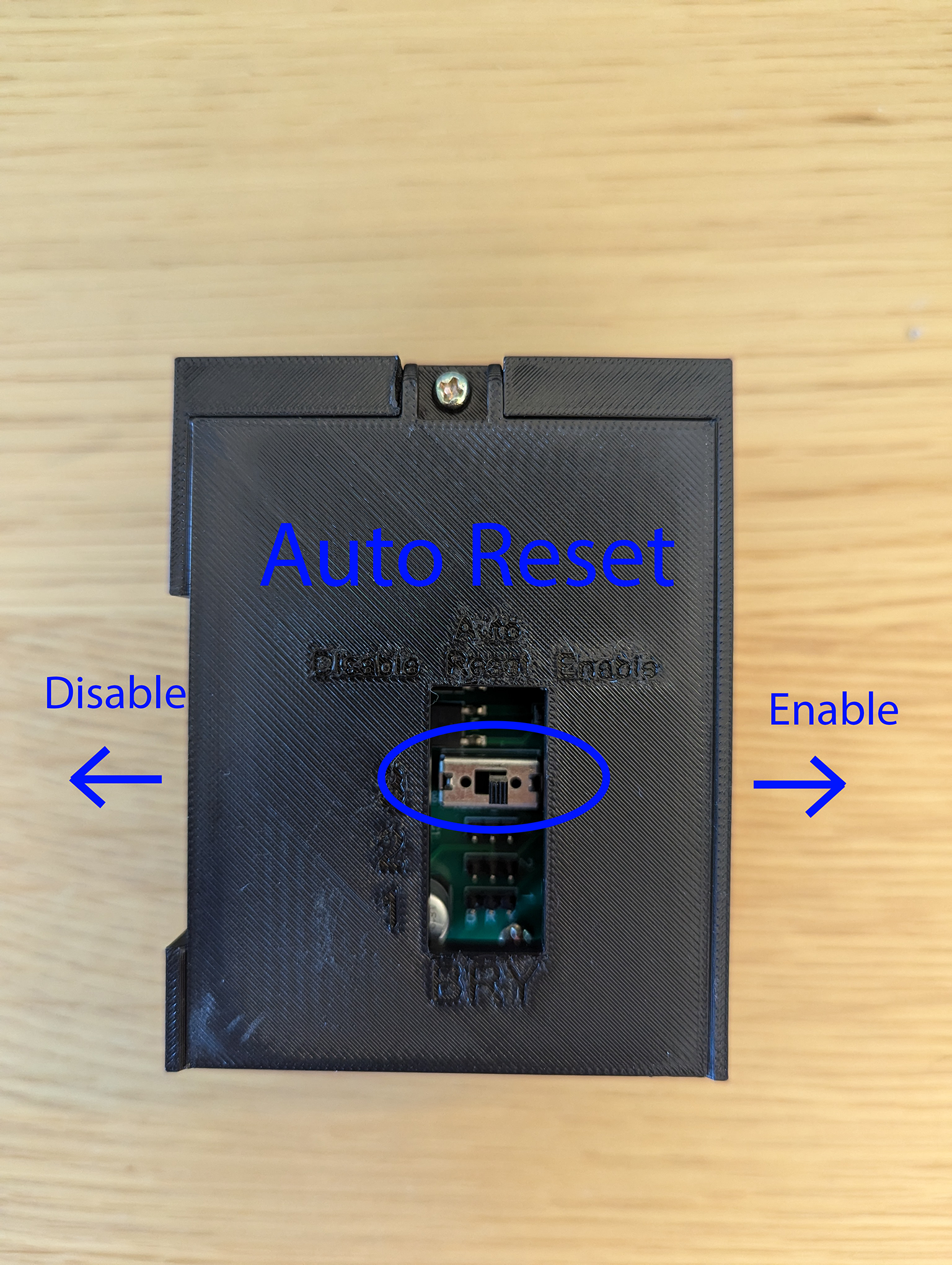
איור 9. מתג איפוס אוטומטי
מחברים את השלט למארח באמצעות כבל USB-A.

איור 10. יציאת חיבור USB-A למארח
איור 11 מציג דוגמה להגדרה מלאה של בקר Android 13 עבור מערכת תאורה אחת ומנוע סרוו.
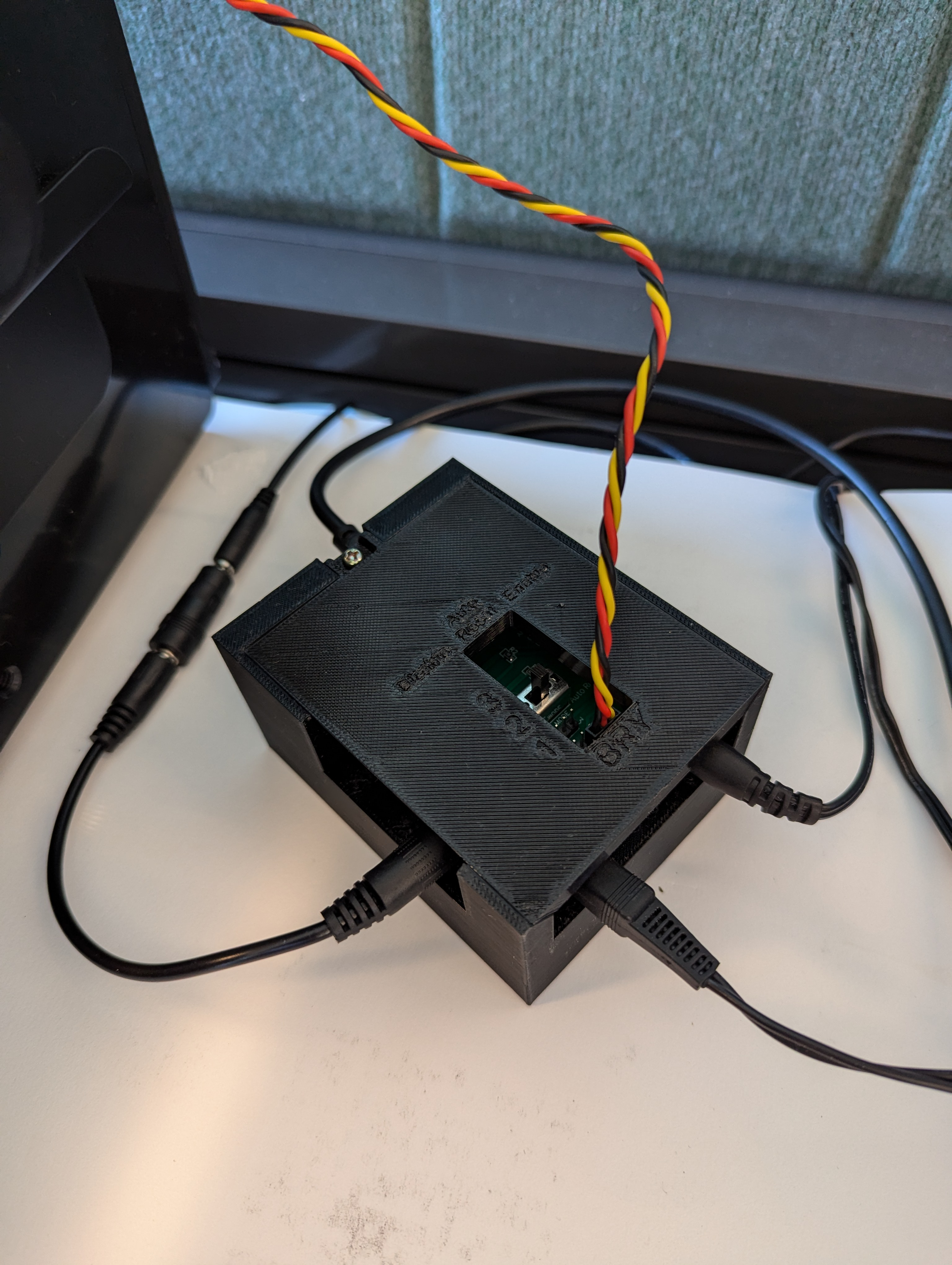
איור 11. השלמת ההגדרה של שלט ב-Android 13
שליטה בתוכנה מהמארח
אפשר להוריד מיקרו-קוד ל-UNO כדי להקצות את פיני ה-PWM לאותות המנוע ולהגדיר את טווחי רוחב הפולסים לזוויות שונות. המיקרו-קוד לשליטה בסיבוב של ששת מנועי HS-755MB כלול במשאבים אחרים. הקטע הזה כולל גם קישור לתוכנית פשוטה בשם rotator.py, שמסובבת את מנועי הסרוו.
שימוש בבקר של Android 13
שימוש ב-Camera ITS:
python tools/run_all_tests.py device=device_id camera=0 rot_rig=arduino:1 scenes=sensor_fusion
עם סקריפט בדיקה כלול:
python rotator.py --ch 1 --dir ON --debug