
Bu sayfada, sensör füzyon testi düzeneğinin hareketini ve ITS-in-a-box'ın aydınlatmasını kontrol eden Android 13 denetleyicisinin nasıl monte edileceği açıklanmaktadır. Sensör füzyon testi, Uyumluluk Test Paketi'ndeki (CTS) Kamera Görüntüsü Test Paketi'nin (Camera ITS) bir parçasıdır. Android 13 denetleyicisi, döndürme ve ışık kontrolü gerektiren test sahneleri için ekipman ışıklandırmasını ve servo motoru kontrol ederek otomasyonu etkinleştirir.
Android 13 denetleyicisine genel bakış
ITS-in-a-box, harici ışık kaynağı olmadan tutarlı aydınlatmanın yanı sıra test tableti ile test telefonu arasında sabit bir mesafeyle tutarlı bir test ortamı sağlar. Android 13 denetleyici, hem servo kontrolünü hem de aydınlatma kontrolünü otomatikleştirir. Ayrıca, sensör füzyonu sahne testleri için DUT'u manuel olarak döndürme ve aydınlatma kontrollü testler için ışıkları manuel olarak açıp kapatma ihtiyacını ortadan kaldırır.
Test düzeneklerinde servo ve aydınlatma kontrolü
Sensör füzyonu test düzeneği, tekrarlanabilir test için telefonun sabit hareketini sağlar. Telefon, çeşitli konumlarda görüntü yakalamak için dama tahtası hedefinin önünde döndürülür. test_sensor_fusion için servo, telefonu yaklaşık 2 saniyede 90 derece ve tekrar geri olacak şekilde kameranın merkez ekseni etrafında döndürür. test_video_stabilization için servo, telefonu 10 derece eksen kamera merkezinin etrafında döndürür ve yürürken video çekerken telefon hareketini taklit etmek için tekrar tekrar geri döndürür. Şekil 1'de, sensör füzyonu test düzeneğinde hareket eden iki telefon gösterilmektedir. Şekil 2'de, sensör füzyonu test düzeneğinde hareket eden bir telefon gösterilmektedir.
Şekil 1. test_sensor_fusion için test düzeneğinde telefon hareketi

Şekil 2. test_video_stabilization için test düzeneğinde telefon hareketi
Servo motor kontrolü
Test düzeneğindeki analog servo motorlar, darbe genişliği modülasyonu (PWM) kullanılarak kontrol edilen konumsal servolardır. Tipik bir konumsal kontrol örneği Şekil 3'te gösterilmektedir. Kontrol sinyalinin süresi 20 ms'dir. Darbe genişliğini minimum genişliğe değiştirmek motoru nötr konuma getirir. Darbe genişliğini maksimum genişliğe değiştirmek ise motoru saat yönünde 180 derece hareket ettirir.
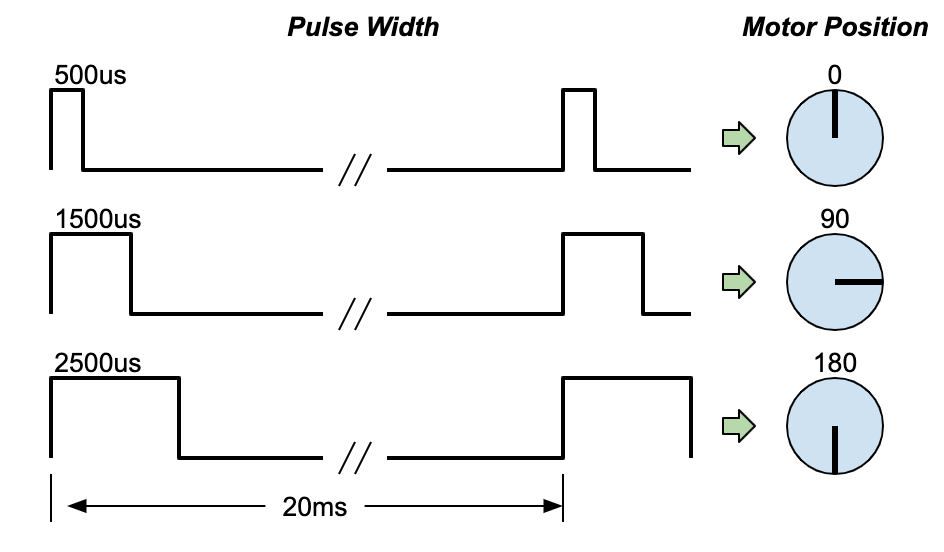
Şekil 3. Tipik servo kontrol açıklaması
Aydınlatma kontrolü
Ana bilgisayarı kullanarak servo motor hareketini ve ışıkları kontrol etmek için sensör füzyonu test düzeneğinin USB bağlantısı olması gerekir. Android 13 kumandası, üzerine özel bir yönlendirme kartı (veya kalkan) monte edilmiş, USB ile bağlı bir Arduino UNO R3 kartı kullanır. Android 13 denetleyicisi, tek bir ana makine bilgisayardan en fazla üç sensör füzyon düzeneği döndürücü servoyu ve en fazla üç ITS-in-a-box aydınlatma sistemini veya bir sensör füzyon düzeneğini kontrol edebilir.
3.0 sürümü Android 13 denetleyici, kullanıcıların Arduino seri bağlantı noktası USB üzerinden açıldığında otomatik sıfırlamayı devre dışı bırakmasına olanak tanır. Kumanda başka bir ana bilgisayara takıldığında veya başka test senaryolarında kullanıldığında otomatik sıfırlama işlevi etkinleştirilir. Kullanıcılar, kumandadaki fiziksel bir anahtarı kullanarak otomatik sıfırlamayı etkinleştirebilir veya devre dışı bırakabilir.
Android 13 denetleyici, herhangi bir Camera ITS-in-a-box ile çalışabilir. Android 13 denetleyici, ışık kontrollü testler yapmak için herhangi bir Camera ITS-in-a-box (RFoV, WFoV, Modular) veya Sensor Fusion kutusuna bağlanabilir. Android 15'ten itibaren, tüm ışık kontrollü testler scene_flash'a dahil edilir ve scene_low_light hariç olmak üzere sensör füzyon kutusu kullanılarak çalıştırılabilir. scene_low_light için grafik görüntüleme amacıyla tablet gerekir ve Camera ITS-in-a-box kullanılarak çalıştırılmalıdır.
scene_flash ve scene_low_light testlerinde, test telefonlarında otomatik flaş işlevini tetiklemek için ışıkların kapalı olduğu karanlık bir ortam gerekir. Şekil 4'te, Android 13 denetleyicisi tarafından ITS-in-a-box'taki ışıkların nasıl açılıp kapatıldığı gösterilmektedir.
Şekil 4. test_auto_flash için ışıklar kapatılıp açıldı
Düzeltme geçmişi
Aşağıdaki tabloda, Android 13 denetleyicisinin düzeltme geçmişi açıklanmakta ve üretim dosyalarının her sürümüne yönelik indirme bağlantıları yer almaktadır.
| Tarih | Düzeltme | Üretim dosyası indirme | Değişiklik günlüğü |
|---|---|---|---|
| Ağustos 2024 | 3,0 |
|
|
| Aralık 2022 | 2,2 |
|
|
| Mart 2022 | 1 |
|
Android 13'te kumanda kurulumu
Bu bölümde, Android 13 denetleyicisinin nasıl ayarlanacağı açıklanmaktadır.
Gerekli bileşenler
Android 13 denetleyiciyi kalifiye satıcılarımızdan birinden satın alabilir veya denetleyiciyi kendiniz oluşturabilirsiniz. Üretim dosyası; PCB Gerber dosyası, PCB malzeme listesi (BOM), PCB yerleştirme bilgileri ve bir muhafaza STEP dosyasından oluşur. Üretim dosyasını indirmek için Düzeltme geçmişi bölümündeki tabloya bakın.
Kendi denetleyicinizi oluşturuyorsanız Arduino UNO R3 kartınız olmalıdır. Kumandayı nitelikli bir satıcıdan satın alırsanız Arduino dahildir.
Android 13 kumanda muhafazası, kumandayı koruyan ve kurulum hatalarını önlemek için kullanılmayan USB bağlantı noktalarını kapatan isteğe bağlı ancak önerilen bir bileşendir. Kontrol cihazının fiyatlandırması ve seçenekleri hakkında ayrıntılı bilgi için yetkili bir satıcıyla iletişime geçin.
Kurulum prosedürü
Android 13 denetleyicisini ayarlamak için aşağıdaki adımları uygulayın:
12 V (aydınlatma için) ve 5 V (servo için) adaptörleri uygun güç jaklarına (Şekil 5) bağlayın.
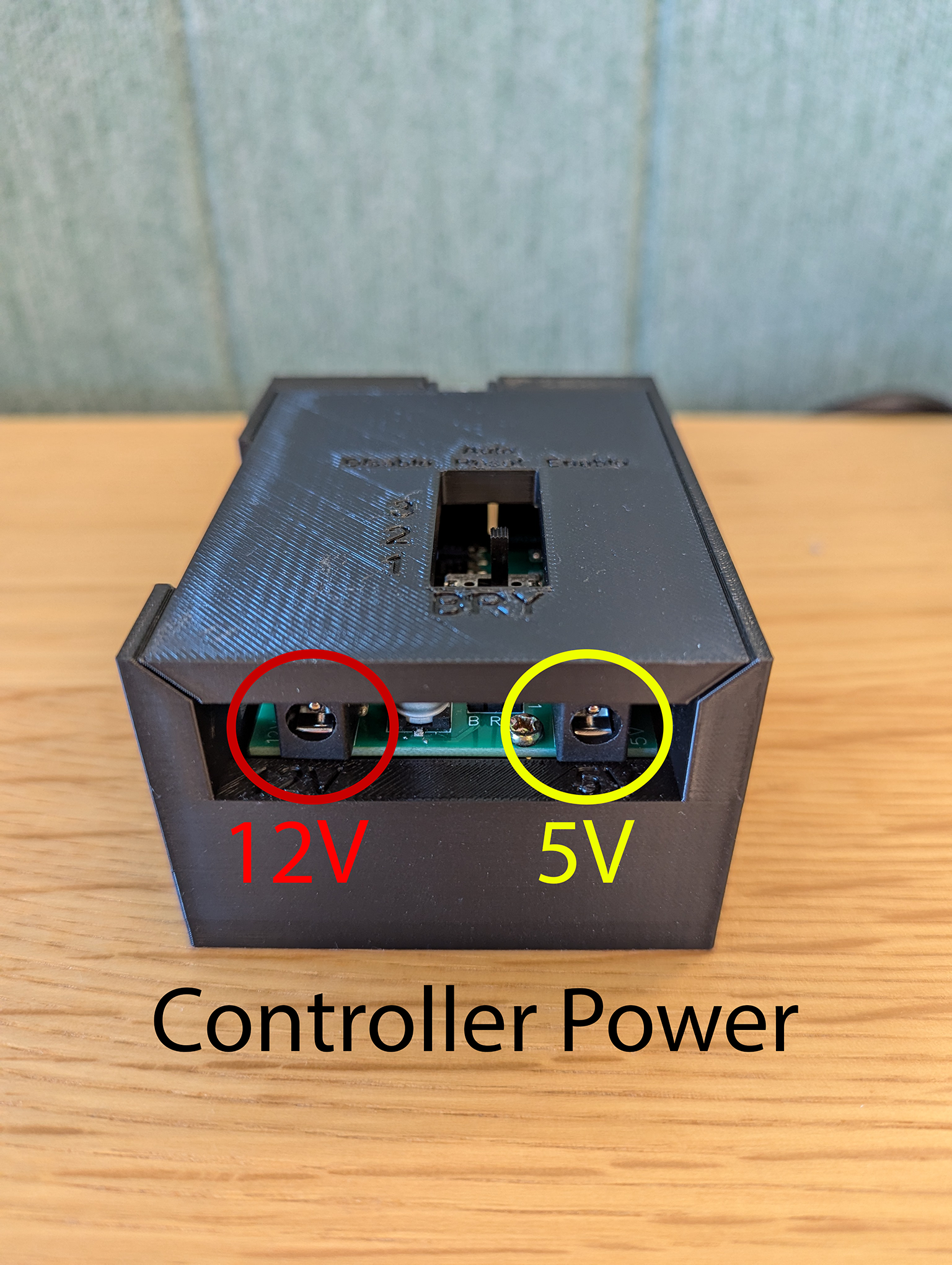
Şekil 5. Güç adaptörünün konumu
ITS-in-a-box veya Sensor Fusion kutu ışıklarınızı aydınlatma kanalı çıkış jaklarından birine bağlayın (Şekil 6). Aydınlatma gücünün silindirine bağlı olarak gerektiğinde adaptör kullanın (Şekil 7).

Şekil 6. Aydınlatma kanallarının çıkış konumu

Şekil 7. Aydınlatma gücünü kumandaya bağlayan adaptör
sensor_fusion sahneleri için kurulum yapmak üzere servoyu servo kanalı bağlantı başlıklarından birine bağlayın.

Şekil 8. Servo bağlantı konumu
3.0 revizyonlu kumandalar için kumanda yeni bir ana makineye bağlanırken otomatik sıfırlama anahtarı
Enableolarak ayarlanmalıdır.3.0 sürümünde, kontrol cihazında etkinleştirilebilen veya devre dışı bırakılabilen bir otomatik sıfırlama anahtarı bulunur. Test sırasında,
its_base_testArduino denetleyicisiyle iletişim kurarken tüm ışıkların her testin başında kısa süreliğine sönmesini önlemek için otomatik sıfırlama anahtarınıDisableolarak ayarlamanızı öneririz. Bu durum, paralel testler yapılırken (ITS, aynı denetleyiciye bağlı test düzeneği aydınlatma sistemiyle aynı anda çalıştırılırken) kritik öneme sahiptir.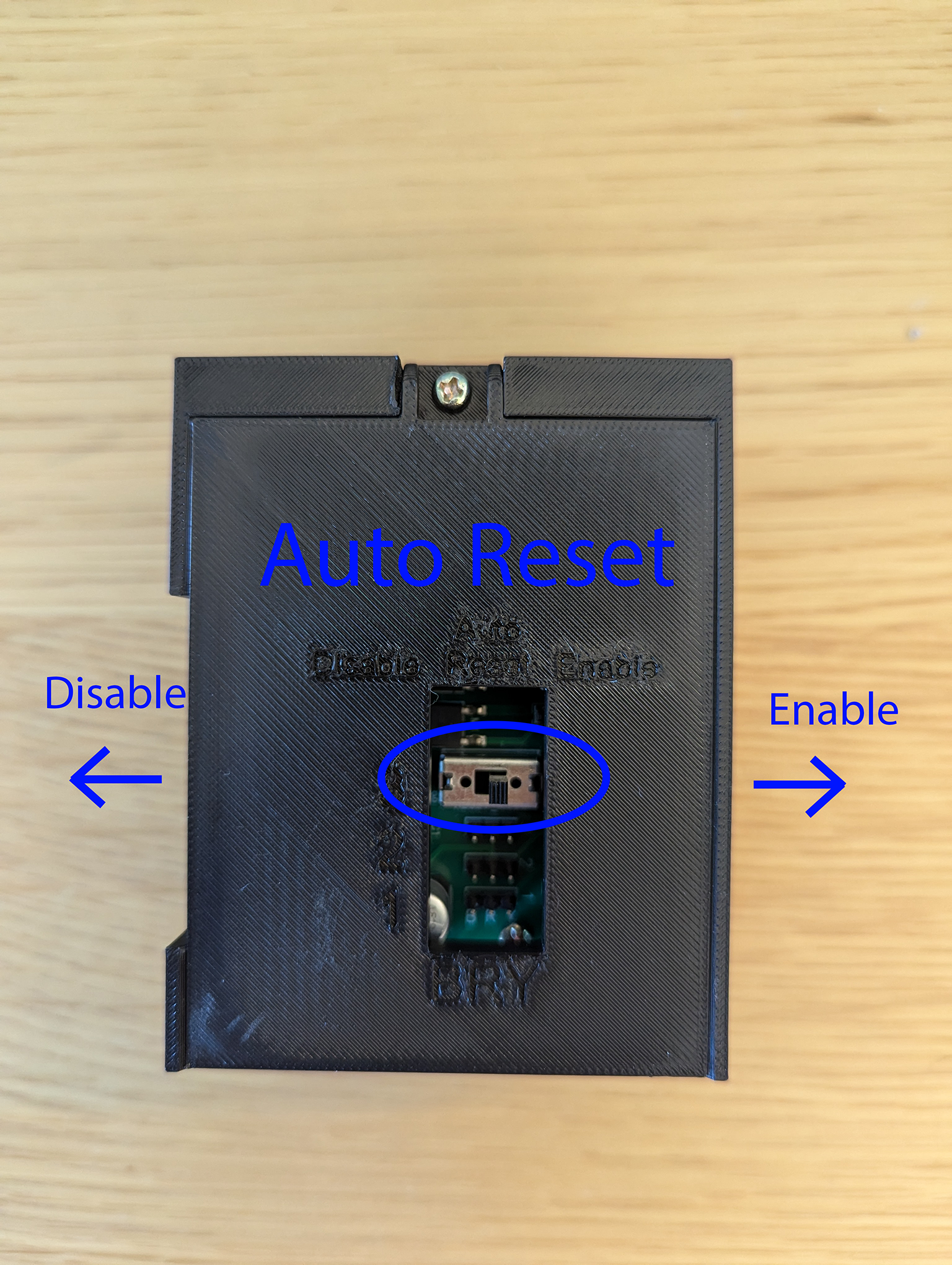
Şekil 9. Otomatik sıfırlama anahtarı
Kumandayı USB-A kablosuyla ana makineye bağlayın.

Şekil 10. Ana makineye USB-A bağlantı noktası
Şekil 11'de, bir aydınlatma sistemi ve servo için tamamlanmış bir Android 13 denetleyici kurulumu örneği gösterilmektedir.
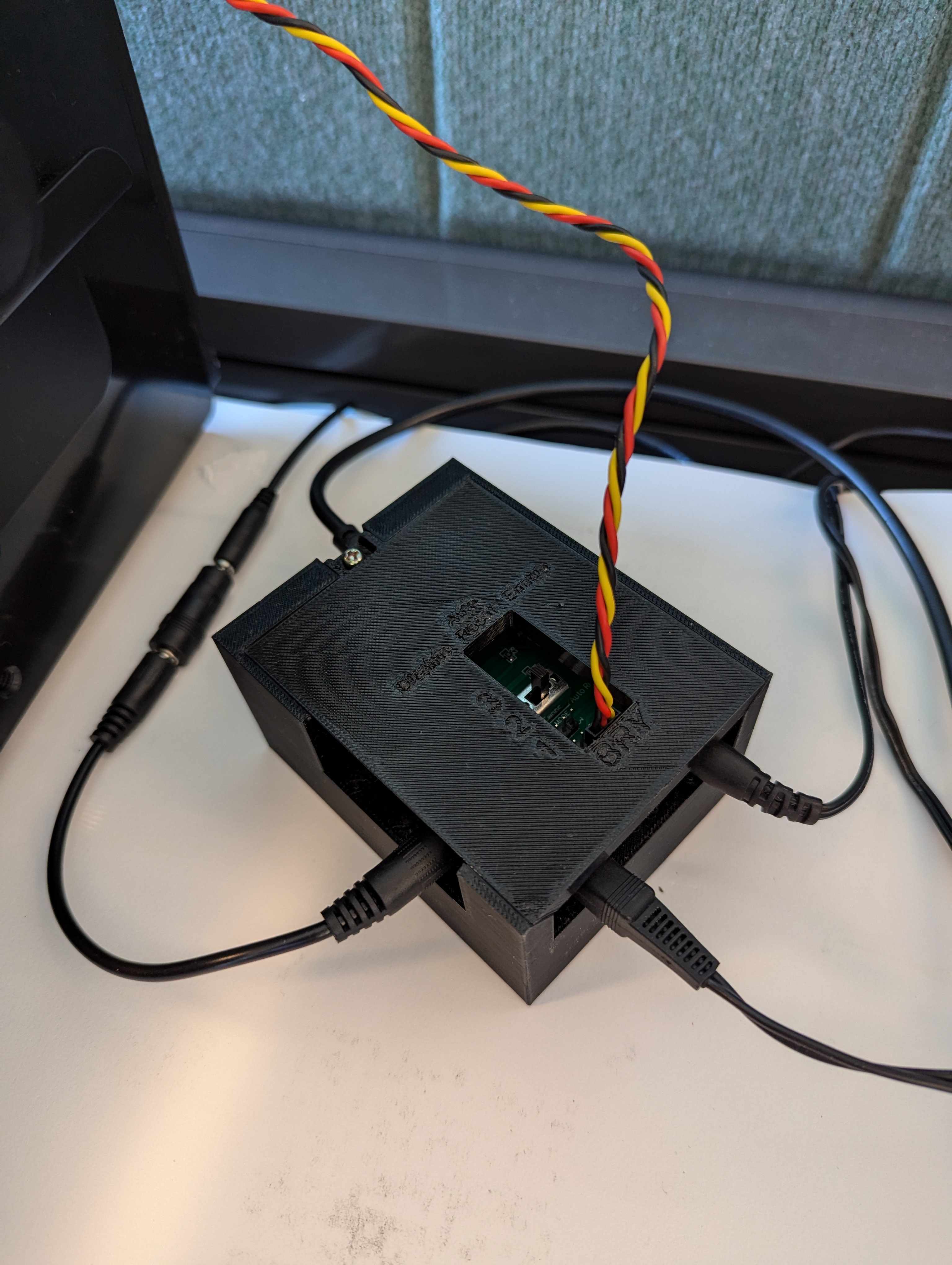
Şekil 11. Android 13'te kumanda kurulumunun tamamlanması
Toplantı sahibinden yazılım kontrolü
PWM pinlerini motor sinyallerine atamak ve farklı açılar için darbe genişliği aralıklarını tanımlamak üzere UNO'ya mikro kod indirilebilir. Altı HS-755MB motorun servo dönüş kontrolü için mikro kod, Diğer kaynaklar bölümünde yer alır. Bu bölümde, servoları döndüren rotator.py adlı basit bir programa ait bağlantı da yer alır.
Android 13 kumandasını kullanma
Kamera ITS kullanımı:
python tools/run_all_tests.py device=device_id camera=0 rot_rig=arduino:1 scenes=sensor_fusion
Test komut dosyası dahil:
python rotator.py --ch 1 --dir ON --debug