
בבדיקה של שילוב החיישנים נמדדת הדיוק של חותמת הזמן של חיישנים במכשירי Android, במיוחד חיישני תמונה של מצלמות וחיישנים גירוסקופיים. בדף הזה מפורטות הוראות מפורטות להגדרת הבדיקה של Sensor Fusion ו-Sensor Fusion Box בפעם הראשונה.
סרטון הדרכה
סרטון הדרכה על הגדרת Sensor Fusion Box.
כלים נדרשים
לפני שמתחילים, חשוב לוודא שיש לכם את הרכיבים הבאים:

- כבל USB A ל-B
- כבל USB A ל-C (לטלפון לבדיקה)
- כבל חשמל 12V 2A (לקופסת הבקרה של המנועים הסורבו)
- כבל חשמל 12V (לתאורה, עם מתג)
- כבל חיבור זכר-זכר 5V (לתאורה)
- כבל המרה זכר-נקבה 5V (לתאורה)
שלב 1: חיבור הנורות
כדי לחבר את האורות:
- משתמשים בכבל זכר-זכר כדי לחבר את שתי הנורות בקצוות התחתונים שלהן, כפי שמוצג באיור 2. מקבעים את הכבל לתחתית התיבה כדי שהוא לא יפריע לפעולה.
- מחברים את הקצה של הנורה הקרוב יותר ליציאה של כבל התאורה לכבל ההמרה
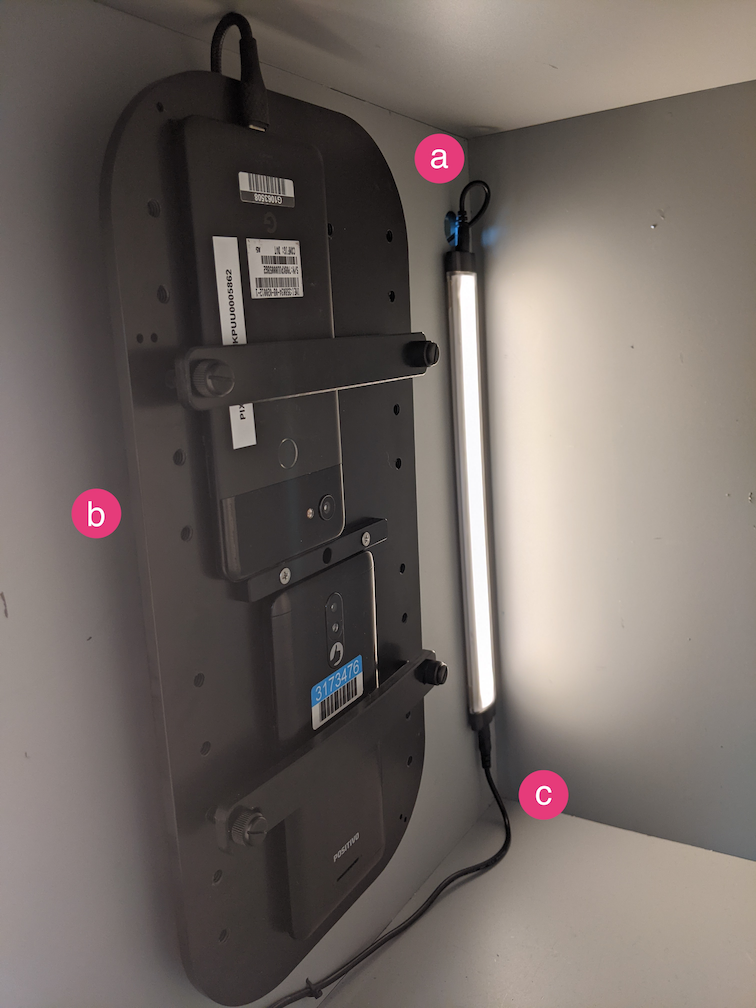
איור 2. חיבור הנורות זו לזו ואחת מהן לכבל ההמרה - חור יציאה של כבל אור
- חור יציאה של כבל USB
- כבל המרה זכר-זכר 5V
- מחברים את הקצה הלא מחובר של כבל ההמרה דרך החור העגול בחלק העליון של התיבה, ואז מחברים אותו לכבל החשמל של התאורה.
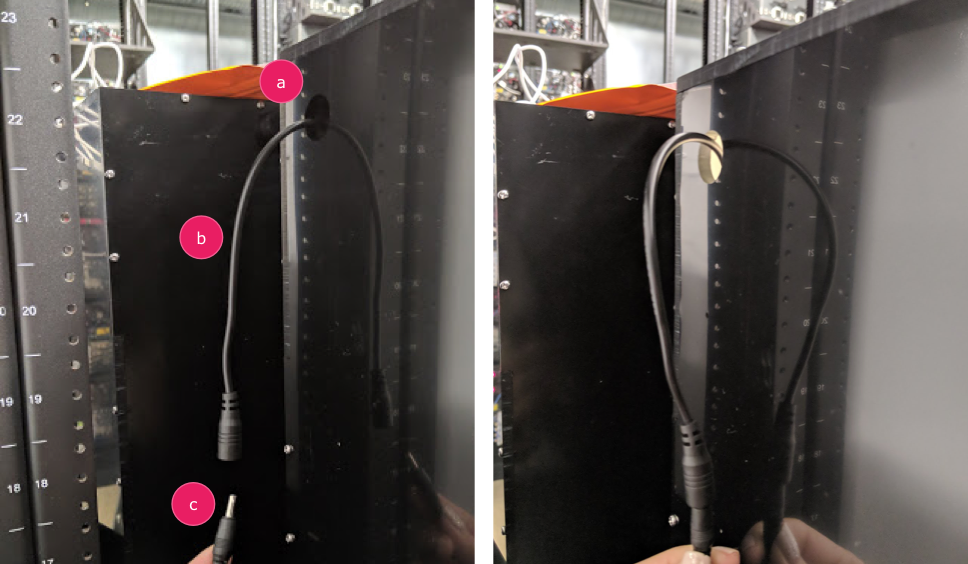
איור 3. כבל ההמרה של Lighting יוצא מהקופסה ומחובר לכבל החשמל - חור יציאה
- כבל המרה
- כבל חשמל
שלב 2: מחברים את המנוע הסרבו
כדי לחבר את המנוע החשמלי:
- מחברים את מחבר הסרבו לבורר הסרבו. חשוב להכניס את המחבר כך שהצבעים יהיו באותו כיוון כמו בתוויות (Y = צהוב, R = אדום, B = שחור), כי היפוך הסדר עלול לגרום נזק למנוע. אם הכבל קצר מדי, צריך להשתמש ב
כבל הארכה לסרוו.
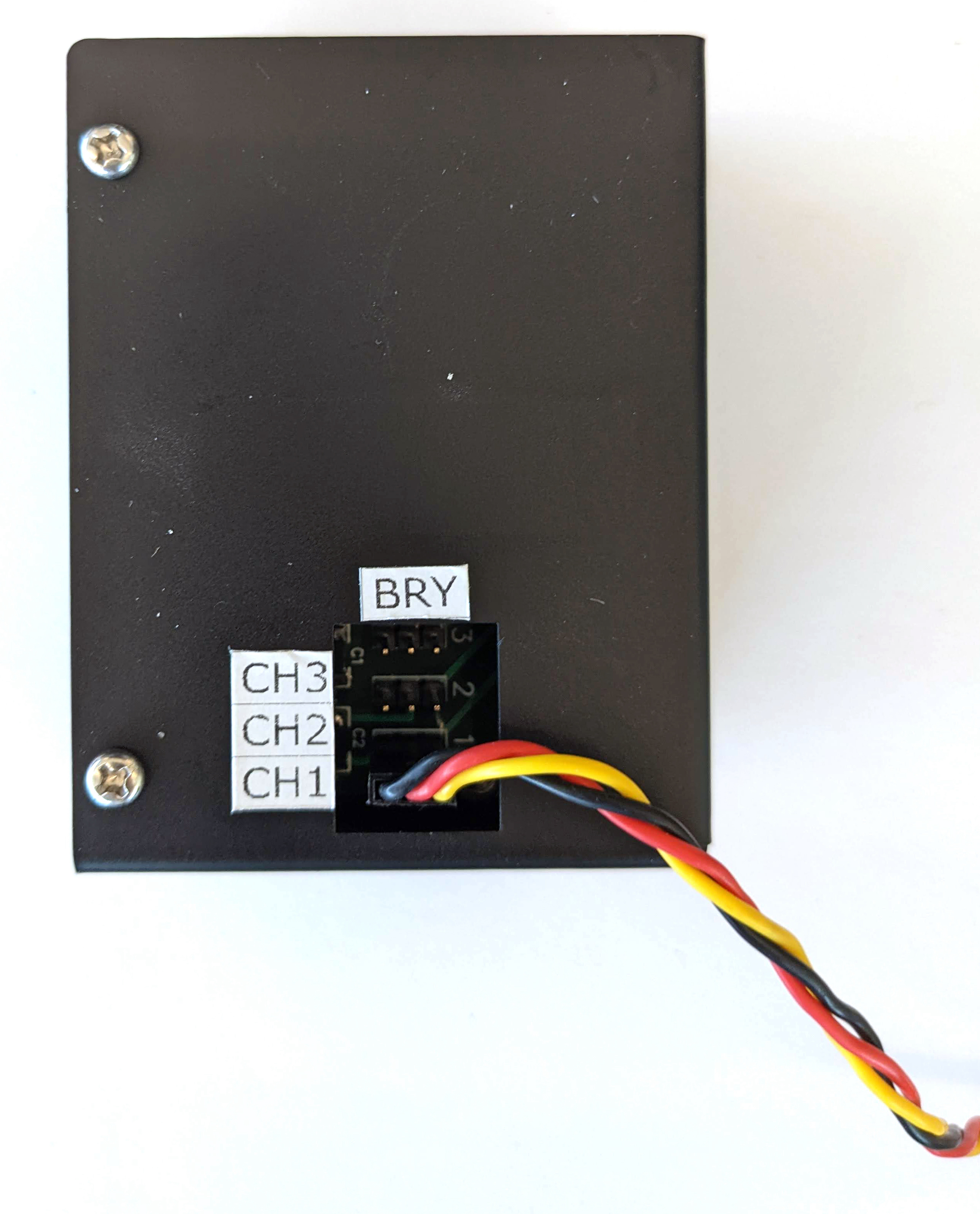
איור 4. חיבור של סרוו לתיבת הבקרה של הסרוו - מחברים את בקר הסרוו באמצעות כבל החשמל שלו (לתאורת ה-LED ולבקר הסרוו יש מקורות חשמל נפרדים ומסוגים שונים).

איור 5. חיבור של אמצעי הבקרה של הסרבו לכבל החשמל הייעודי שלו - משתמשים בכבל USB A ל-B כדי לחבר את תיבת הבקרה של הסרוו למארח (המכונה שבה פועל הבדיקה).
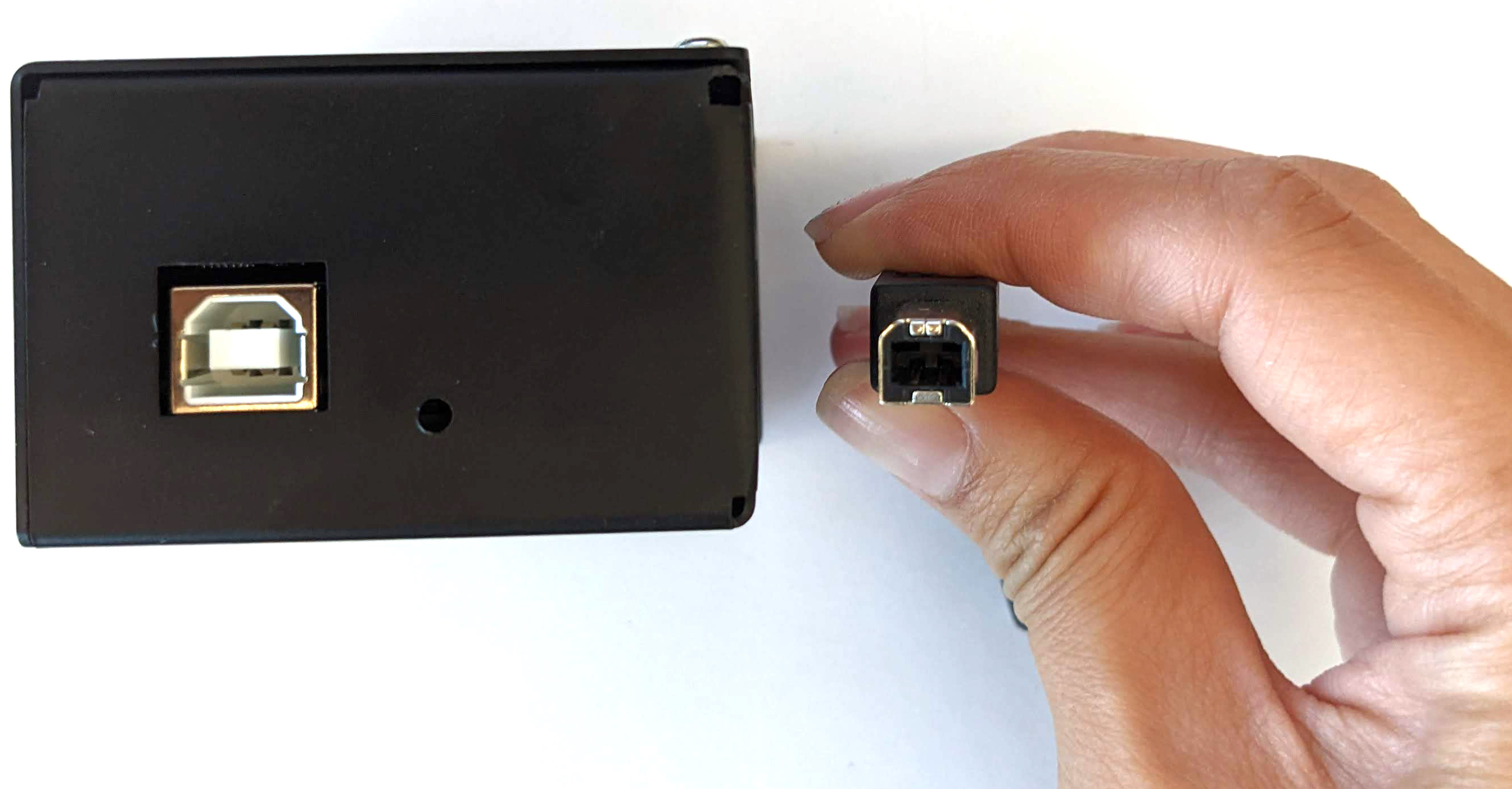
איור 6. חיבור של תיבת הבקרה של הסרבו למכונה המארחת
שלב 3: מחברים את הטלפון
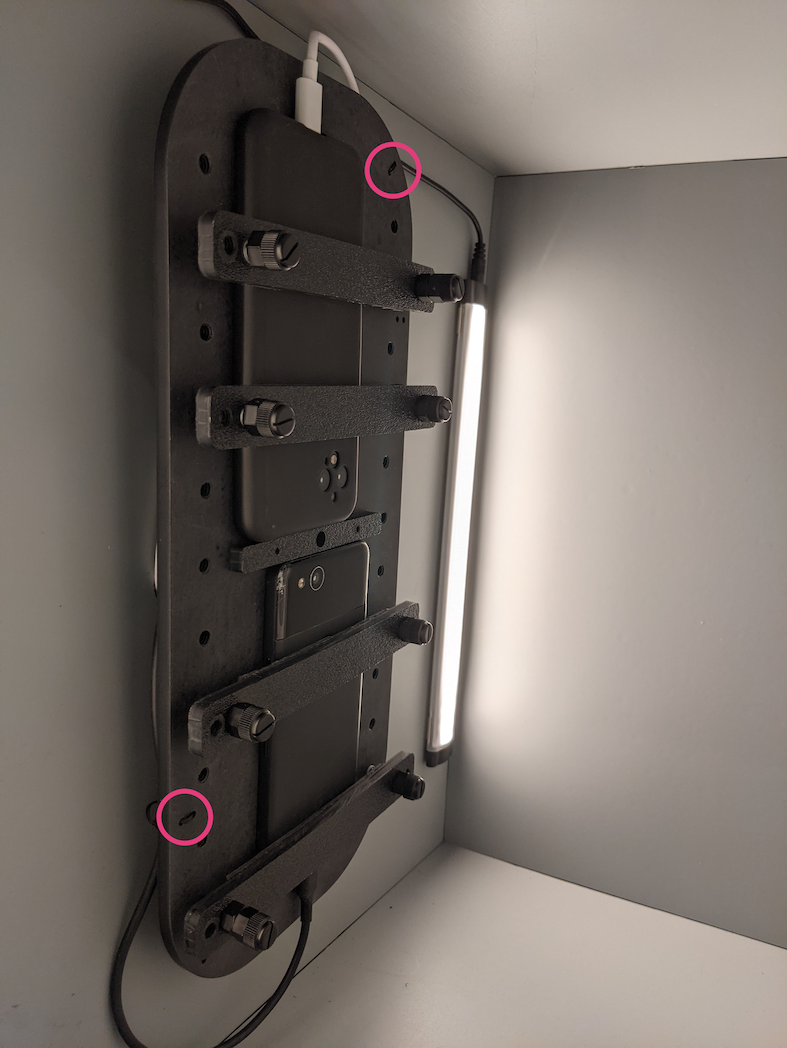
- מניחים את הטלפון על המתקן ומצמידים אותו. מבריגים את בורג הנילון ימינה.

איור 7. הצבת הטלפון במתקן והצמדת הטלפון למתקן צריך למקם את הטלפונים כך שכבלי ה-USB יהיו בפריפריה של מעמד הטלפון והמצלמות יהיו ליד מרכז המעמד.
- משתמשים בכביסן כדי לחבר את כבל ה-USB של הטלפון ללוחית המכשיר ולהוביל אותו מחוץ לקופסה דרך פתח היציאה. מחברים את הקצה השני של הכבל למארח שבו מריצים את הבדיקה.
איור 8. כבל USB של טלפון שמחובר למתקן באמצעות כבלים
שלב 4: מריצים את סקריפט הבדיקה
קובץ ההפעלה הראשי של Python לסקריפט הבדיקה הוא:
python tools/run_all_tests.py device=ID camera=0 scenes=sensor_fusion rot_rig=default
אפשר לשנות את הפקודה כדי לציין את הכתובת בפועל של ה-rotator באמצעות:
rot_rig=VID:PID:CH
- כדי לקבוע את מזהה הספק (VID) ואת מזהה המוצר (PID), משתמשים בפקודה
lsusbב-Linux. - כברירת מחדל, הערכים של VID ו-PID מוגדרים כ-
04d8ו-fc73עם ערוץ '1'.
מספר פעולות, פורמטים שונים
כדי לבצע כמה פעולות עם פורמטים שונים, אפשר להשתמש בסקריפט אחר (אבל התוצאות לא יועלו אל CtsVerifier.apk). דוגמה לסקריפט בדיקה:
python tools/run_sensor_fusion_box.py device=FA7831A00278 camera=0 rotator=default img_size=640,360 fps=30 test_length=7בעיות בהרשאות
כדי לפתור בעיות שקשורות להרשאות לצורך שליטה במנוע דרך יציאת ה-USB:
- מוסיפים את שם המשתמש של המפעיל לקבוצה
dialoutבאמצעות:sudo adduser USERNAME dialout - ניתוק המפעיל מהמערכת.
- מתחברים לאופרטורים.