
センサー フュージョン テストでは、Android デバイスのセンサー(特にカメラ イメージ センサーとジャイロスコープ)のタイムスタンプ精度を測定します。このページでは、Sensor Fusion テストと Sensor Fusion Box を初めてセットアップする際の手順を説明します。
動画チュートリアル
これは、Sensor Fusion Box のセットアップ方法を紹介する動画チュートリアルです。
必要な工具
始める前に、次の部品を準備します。

- USB A - USB B ケーブル
- USB A - USB C ケーブル(テスト対象のスマートフォン用)
- 12V 2A 電源コード(サーボ制御ボックス用)
- 12V 電源コード(ライト用、スイッチ付き)
- 5V オス - オス接続ケーブル(ライト用)
- 5V オス - メス変換ケーブル(ライト用)
ステップ 1: ライトを接続する
次のようにして、ライトを接続します。
- オス - オス ケーブルを使用して、2 つのライトをライトの下端で図 2 のように接続します。ケーブルを箱の底部に固定して、ケーブルが操作の邪魔にならないようにします。
- ライトケーブルの出口穴に近い方の端を変換ケーブルに接続します。
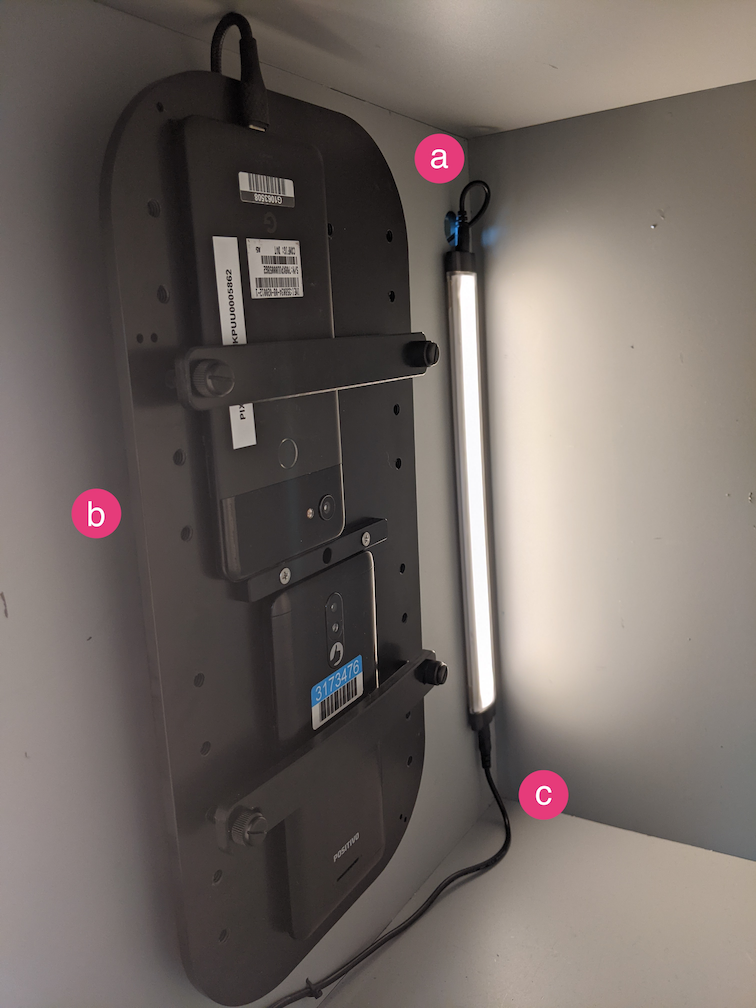
図 2. ライトを互いに接続し、1 つを変換ケーブルに接続 - ライトケーブル出口穴
- USB ケーブル出口穴
- 5V オス - オス変換ケーブル
- 変換ケーブルの接続していない方の端を箱の丸い穴に通し、ライト用の電源ケーブルに接続します。
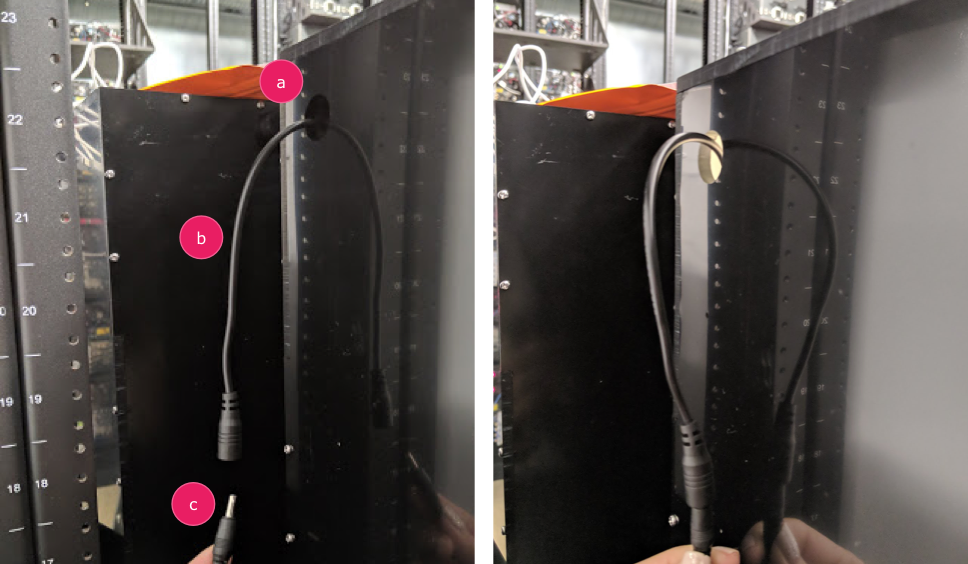
図 3. 照明変換ケーブルが箱から出て電源ケーブルに接続 - 出口穴
- 変換ケーブル
- 電源ケーブル
ステップ 2: サーボを接続する
次のようにして、サーボを取り付けます。
- サーボコネクタをサーボ制御ボックスに差し込みます。ラベルに対応する色のコネクタを差し込みます(Y = 黄色、R = 赤、B = 黒)。順序を逆にするとモーターを破損する恐れがあります。コードが短すぎる場合は、サーボ延長ケーブルを使用してください。

図 4. サーボをサーボ制御ボックスに接続 - サーボ制御ボックスを電源コードに接続します(ライトとサーボ制御ボックスには独立した専用の電源があります)。

図 5. サーボ制御ボックスを専用電源コードに接続 - USB A - USB B ケーブルを使用して、サーボ制御ボックスをホスト(テストを実行しているマシン)に接続します。
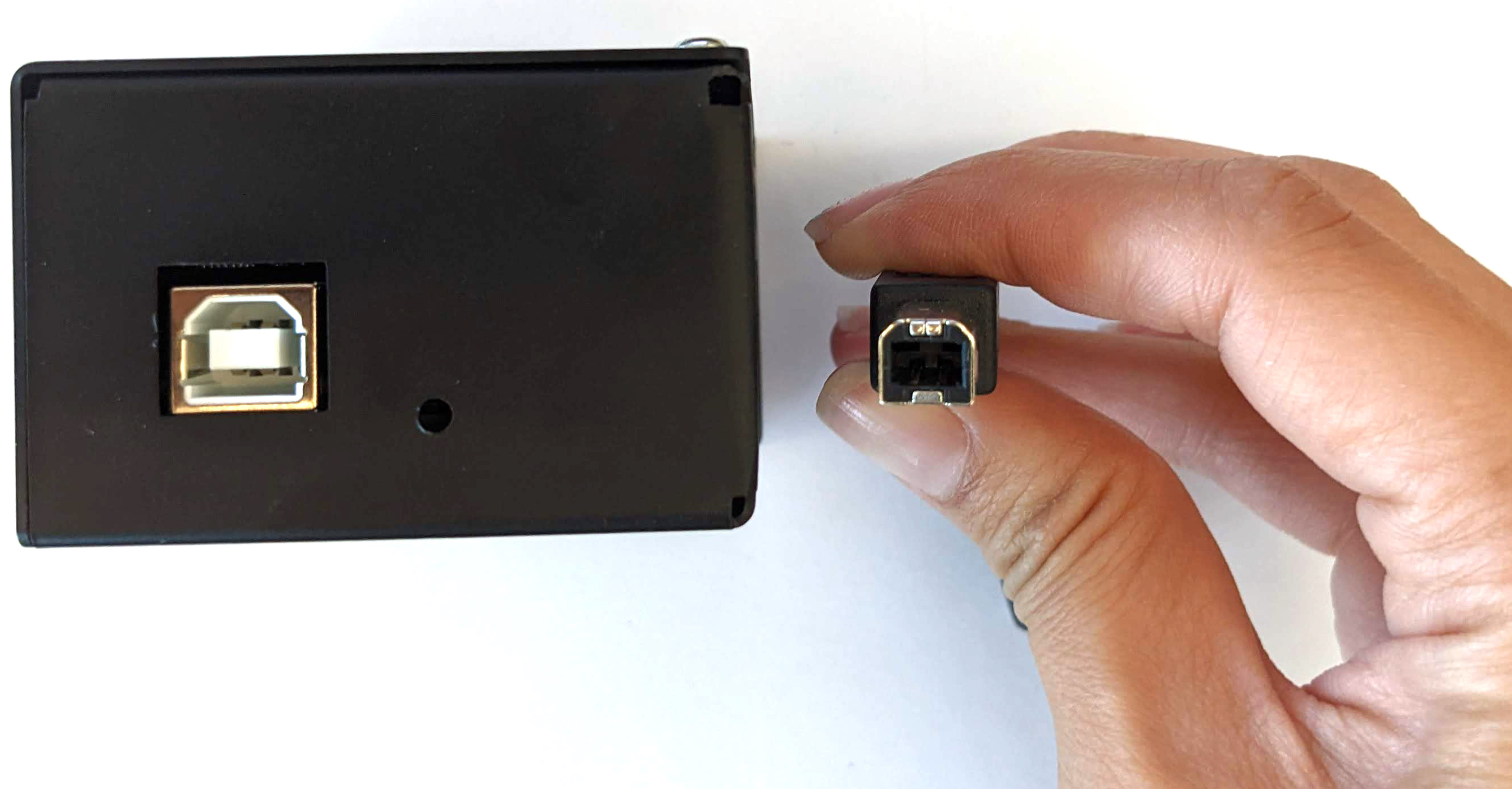
図 6. サーボ制御ボックスをホストマシンに接続
ステップ 3: スマートフォンを取り付ける
- スマートフォンを固定具にセットし、しっかりと固定します。ナイロン製のねじで締め付けます。

図 7. スマートフォンを固定具に装着して固定 スマートフォンは、USB コードがスマートフォン マウントの周囲にあり、カメラがマウントの中央付近にあるように配置します。
- 結束バンドを使用してスマートフォン用の USB コードを固定プレートに縛り付け、出口穴から箱の外に出します。コードのもう一方の端を、テストを実行しているホストに接続します。
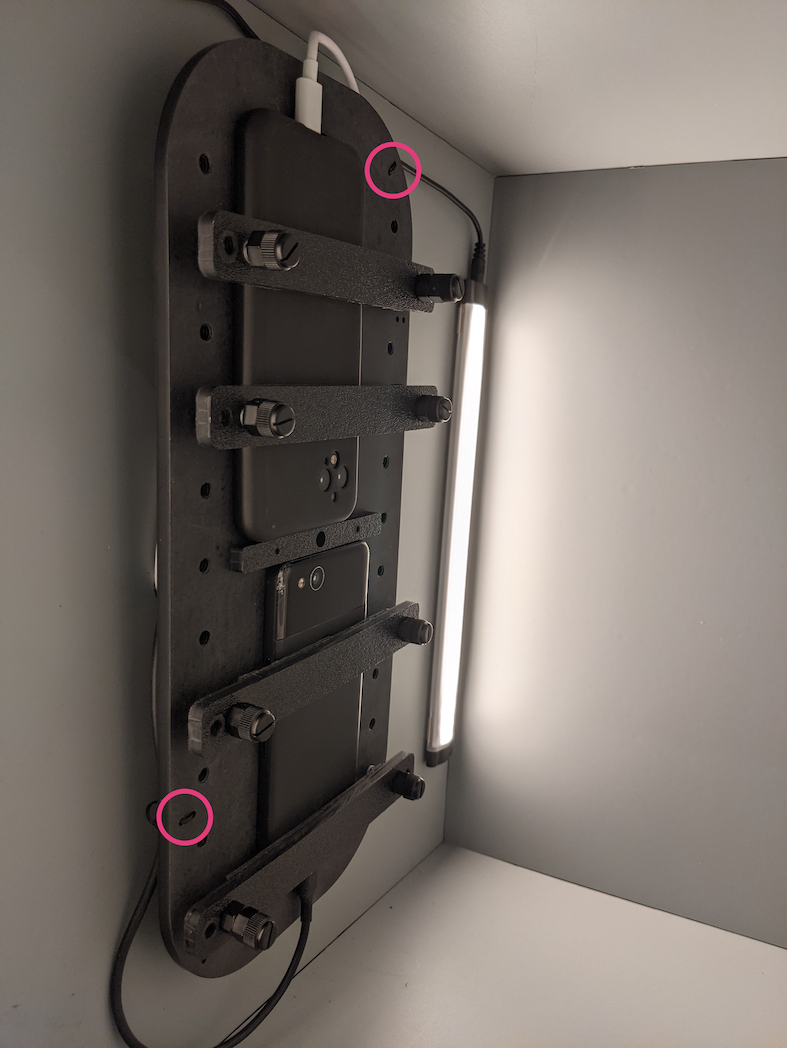
図 8. スマートフォン用の USB コードを結束バンドで固定
ステップ 4: テスト スクリプトを実行する
テスト スクリプトのメインの Python 実行ファイルは次のとおりです。
python tools/run_all_tests.py device=ID camera=0 scenes=sensor_fusion rot_rig=default
次を使用してコマンドを修正すると、実際のローテーター アドレスを指定できます。
rot_rig=VID:PID:CH
- ベンダー ID(VID)とプロダクト ID(PID)を確認するには、Linux コマンド
lsusbを使用します。 - デフォルトでは、VID に
04d8、PID にfc73、チャネルに「1」が設定されています。
複数の実行、異なる形式
別のスクリプトを使用して異なる形式で複数のテストを実行できます(ただし、結果は CtsVerifier.apk にアップロードされません)。次のサンプル テスト スクリプトをご覧ください。
python tools/run_sensor_fusion_box.py device=FA7831A00278 camera=0 rotator=default img_size=640,360 fps=30 test_length=7権限の問題
USB ポートからのモーターの制御に関して権限の問題が発生した場合には、次のようにして解決します。
- 次のようにして、オペレーターのユーザー名を
dialoutグループに追加します。sudo adduser USERNAME dialout - オペレーターをログアウトします。
- オペレーターでログインします。