
এই পৃষ্ঠাটি বর্ণনা করে কিভাবে Android 13 কন্ট্রোলারকে একত্রিত করতে হয়, যা একটি সেন্সর ফিউশন টেস্ট রিগ এবং ITS-ইন-এ-বক্সের জন্য আলোর গতি নিয়ন্ত্রণ করে। সেন্সর ফিউশন পরীক্ষাটি কম্প্যাটিবিলিটি টেস্ট স্যুট (সিটিএস) এর ক্যামেরা ইমেজ টেস্ট স্যুট (ক্যামেরা আইটিএস) এর অংশ। অ্যান্ড্রয়েড 13 কন্ট্রোলার রিগ লাইটিং এবং সার্ভো মোটর নিয়ন্ত্রণ করে অটোমেশন সক্ষম করে এমন দৃশ্যের জন্য যা ঘূর্ণন এবং আলো নিয়ন্ত্রণের প্রয়োজন হয়।
অ্যান্ড্রয়েড 13 কন্ট্রোলার ওভারভিউ
আইটিএস-ইন-এ-বক্স বাহ্যিক আলোর উত্স ছাড়াই ধারাবাহিক আলো ছাড়াও টেস্ট ট্যাবলেট এবং টেস্ট ফোনের মধ্যে একটি নির্দিষ্ট দূরত্ব সহ একটি ধারাবাহিক পরীক্ষার পরিবেশ প্রদান করে। অ্যান্ড্রয়েড 13 কন্ট্রোলার সার্ভো কন্ট্রোল এবং লাইটিং কন্ট্রোল উভয়কেই স্বয়ংক্রিয় করে এবং সেন্সর ফিউশন দৃশ্য পরীক্ষার জন্য DUT-কে ম্যানুয়ালি ঘোরানোর এবং আলো-নিয়ন্ত্রিত পরীক্ষার জন্য ম্যানুয়ালি লাইট অন এবং অফ করার প্রয়োজনীয়তা দূর করে।
পরীক্ষার রিগগুলিতে সার্ভো এবং আলো নিয়ন্ত্রণ
সেন্সর ফিউশন টেস্ট রিগ পুনরুত্পাদনযোগ্য পরীক্ষার জন্য ফোনের একটি নির্দিষ্ট গতি প্রদান করে। ফোনটি বিভিন্ন অবস্থানে ফোনের সাথে ইমেজ ক্যাপচার করার অনুমতি দেওয়ার জন্য একটি চেকারবোর্ড লক্ষ্যের সামনে ঘোরানো হয়। test_sensor_fusion- এর জন্য, servo ফোনটিকে ক্যামেরা কেন্দ্রের অক্ষের চারপাশে 90 ডিগ্রী এবং পিছনে প্রায় 2 সেকেন্ডের মধ্যে ঘোরায়। test_video_stabilization- এর জন্য, servo ফোনটিকে ক্যামেরা কেন্দ্রের অক্ষের চারপাশে 10 ডিগ্রি এবং পিছনে বারবার ঘোরায় যাতে হাঁটার সময় ভিডিও নেওয়ার সময় ফোনের গতিবিধি অনুকরণ করা হয়। চিত্র 1 দেখায় দুটি ফোন একটি সেন্সর ফিউশন টেস্ট রিগে চলমান। চিত্র 2 দেখায় যে একটি ফোন একটি সেন্সর ফিউশন টেস্ট রিগে চলমান।
চিত্র 1. টেস্ট_সেন্সর_ফিউশনের জন্য টেস্ট রিগে ফোনের চলাচল
চিত্র 2. test_video_stabilization এর জন্য টেস্ট রিগে ফোন মুভমেন্ট
সার্ভো মোটর নিয়ন্ত্রণ
টেস্ট রিগে অ্যানালগ সার্ভো মোটর হল পজিশনাল সার্ভো যা পালস-উইডথ মড্যুলেশন (PWM) ব্যবহার করে নিয়ন্ত্রিত হয়। একটি সাধারণ অবস্থানগত নিয়ন্ত্রণ উদাহরণ চিত্র 3-এ দেখানো হয়েছে। নিয়ন্ত্রণ সংকেতের সময়কাল 20 ms। পালস প্রস্থকে সর্বনিম্ন প্রস্থে পরিবর্তন করা মোটরটিকে নিরপেক্ষ অবস্থানে নিয়ে যায় এবং নাড়ির প্রস্থকে সর্বাধিক প্রস্থে পরিবর্তন করলে মোটরটিকে ঘড়ির কাঁটার দিকে 180 ডিগ্রি চলে যায়।
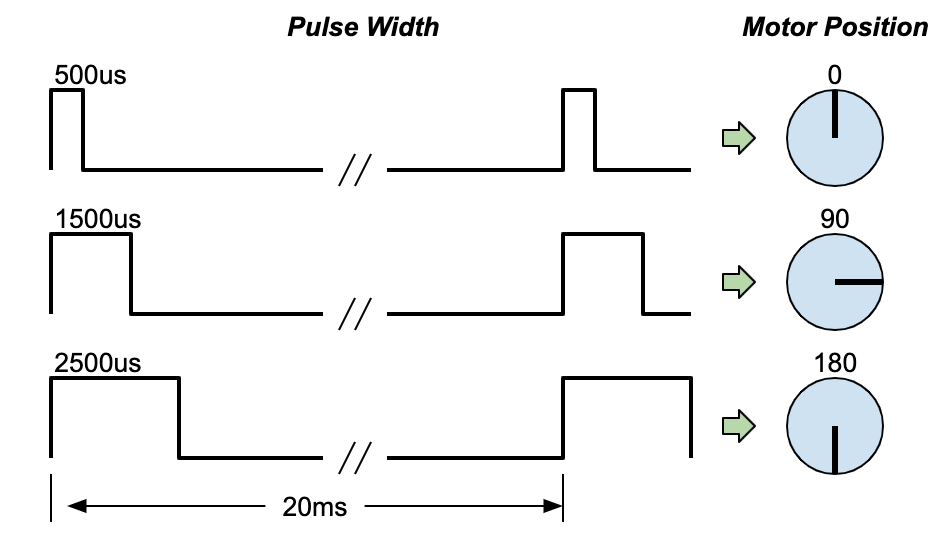
চিত্র 3. সাধারণ সার্ভো নিয়ন্ত্রণ বিবরণ
আলো নিয়ন্ত্রণ
একটি হোস্ট কম্পিউটার ব্যবহার করে সার্ভো মোটর গতি এবং আলো নিয়ন্ত্রণ করতে, সেন্সর ফিউশন টেস্ট রিগ একটি USB সংযোগ প্রয়োজন। Android 13 কন্ট্রোলার একটি USB-সংযুক্ত Arduino UNO R3 বোর্ড ব্যবহার করে যার উপরে একটি কাস্টম রাউটিং বোর্ড (বা শিল্ড ) লাগানো থাকে। Android 13 কন্ট্রোলার একটি একক হোস্ট কম্পিউটার থেকে তিনটি পর্যন্ত সেন্সর ফিউশন রিগ রোটেটর সার্ভো এবং তিনটি পর্যন্ত আইটিএস-ইন-এ-বক্স লাইটিং সিস্টেম বা একটি সেন্সর ফিউশন রিগ নিয়ন্ত্রণ করতে পারে।
রিভিশন 3.0 অ্যান্ড্রয়েড 13 কন্ট্রোলার ব্যবহারকারীদের অটো-রিসেট অক্ষম করতে দেয় যখন ইউএসবি-এর মাধ্যমে আরডুইনো সিরিয়াল পোর্ট খোলা হয়। স্বয়ংক্রিয়-রিসেট ফাংশন সক্রিয় হয় যখন কন্ট্রোলার অন্য হোস্টে প্লাগ করা হয় বা অন্যান্য পরীক্ষার ক্ষেত্রে ব্যবহার করা হয়। ব্যবহারকারীরা কন্ট্রোলারে একটি শারীরিক সুইচ ব্যবহার করে স্বয়ংক্রিয়-রিসেট সক্ষম বা অক্ষম করতে পারেন।
অ্যান্ড্রয়েড 13 কন্ট্রোলার যেকোনো ক্যামেরা আইটিএস-ইন-এ-বক্সের সাথে কাজ করতে পারে। আলো-নিয়ন্ত্রিত পরীক্ষা চালানোর জন্য Android 13 কন্ট্রোলারটি যেকোনো ক্যামেরা ITS-in-a-box (RFoV, WFoV, মডুলার) বা সেন্সর ফিউশন বক্সের সাথে সংযুক্ত হতে পারে। অ্যান্ড্রয়েড 15 থেকে, সমস্ত আলো-নিয়ন্ত্রিত পরীক্ষা দৃশ্য_ফ্ল্যাশে অন্তর্ভুক্ত করা হয়েছে এবং দৃশ্য_লো_লাইট ব্যতীত সেন্সর ফিউশন বক্স ব্যবহার করে চালানো যেতে পারে, যার জন্য চার্ট প্রদর্শনের জন্য একটি ট্যাবলেট প্রয়োজন এবং ক্যামেরা আইটিএস-ইন-এ-বক্স ব্যবহার করে চালাতে হবে।
দৃশ্য_ফ্ল্যাশ এবং দৃশ্য_লো_লাইটে পরীক্ষার জন্য, পরীক্ষার ফোনে স্বয়ংক্রিয় ফ্ল্যাশ ফাংশন ট্রিগার করার জন্য আলো বন্ধ থাকা অন্ধকার পরিবেশ প্রয়োজন। চিত্র 4 দেখায় যে আইটিএস-ইন-এ-বক্সের আলোগুলি অ্যান্ড্রয়েড 13 কন্ট্রোলার দ্বারা বন্ধ এবং চালু করা হচ্ছে৷
চিত্র 4. পরীক্ষা_অটো_ফ্ল্যাশের জন্য লাইট বন্ধ এবং চালু করা হয়েছে
পুনর্বিবেচনার ইতিহাস
নিম্নলিখিত সারণীটি Android 13 কন্ট্রোলারের পুনর্বিবেচনার ইতিহাস বর্ণনা করে এবং উত্পাদন ফাইলগুলির প্রতিটি সংস্করণের ডাউনলোড লিঙ্কগুলি অন্তর্ভুক্ত করে।
| তারিখ | রিভিশন | উত্পাদন ফাইল ডাউনলোড | লগ পরিবর্তন করুন |
|---|---|---|---|
| আগস্ট 2024 | 3.0 |
| |
| ডিসেম্বর 2022 | 2.2 |
| |
| মার্চ 2022 | 1 |
|
Android 13 কন্ট্রোলার সেটআপ
এই বিভাগে একটি Android 13 কন্ট্রোলার সেট আপ কিভাবে বর্ণনা করে.
প্রয়োজনীয় উপাদান
আপনি আমাদের যোগ্য বিক্রেতাদের একজনের মাধ্যমে Android 13 কন্ট্রোলার কিনতে পারেন অথবা আপনি নিজেই কন্ট্রোলার তৈরি করতে পারেন। প্রোডাকশন ফাইলটিতে একটি PCB Gerber ফাইল, PCB বিল অফ ম্যাটেরিয়াল (BOM), PCB প্লেসমেন্ট তথ্য, এবং একটি এনক্লোজার STEP ফাইল রয়েছে। প্রোডাকশন ফাইলটি ডাউনলোড করতে, রিভিশন ইতিহাসে টেবিলটি দেখুন।
আপনি যদি নিজের কন্ট্রোলার তৈরি করেন, আপনার অবশ্যই একটি Arduino UNO R3 বোর্ড থাকতে হবে। একজন যোগ্য বিক্রেতার মাধ্যমে কন্ট্রোলার ক্রয় করলে, Arduino অন্তর্ভুক্ত করা হয়।
অ্যান্ড্রয়েড 13 কন্ট্রোলার এনক্লোজার একটি ঐচ্ছিক কিন্তু প্রস্তাবিত উপাদান যা কন্ট্রোলারকে রক্ষা করে এবং সেটআপ ত্রুটি প্রতিরোধ করতে অব্যবহৃত USB পোর্ট বন্ধ করে দেয়। নিয়ামকের জন্য মূল্য এবং বিকল্প সম্পর্কে বিশদ বিবরণের জন্য, একজন যোগ্য বিক্রেতার সাথে যোগাযোগ করুন।
সেটআপ পদ্ধতি
Android 13 কন্ট্রোলার সেট আপ করতে, এই পদক্ষেপগুলি অনুসরণ করুন:
উপযুক্ত পাওয়ার জ্যাকগুলির সাথে 12V (আলোর জন্য) এবং 5V (সার্ভোর জন্য) অ্যাডাপ্টারগুলিকে সংযুক্ত করুন (চিত্র 5)।
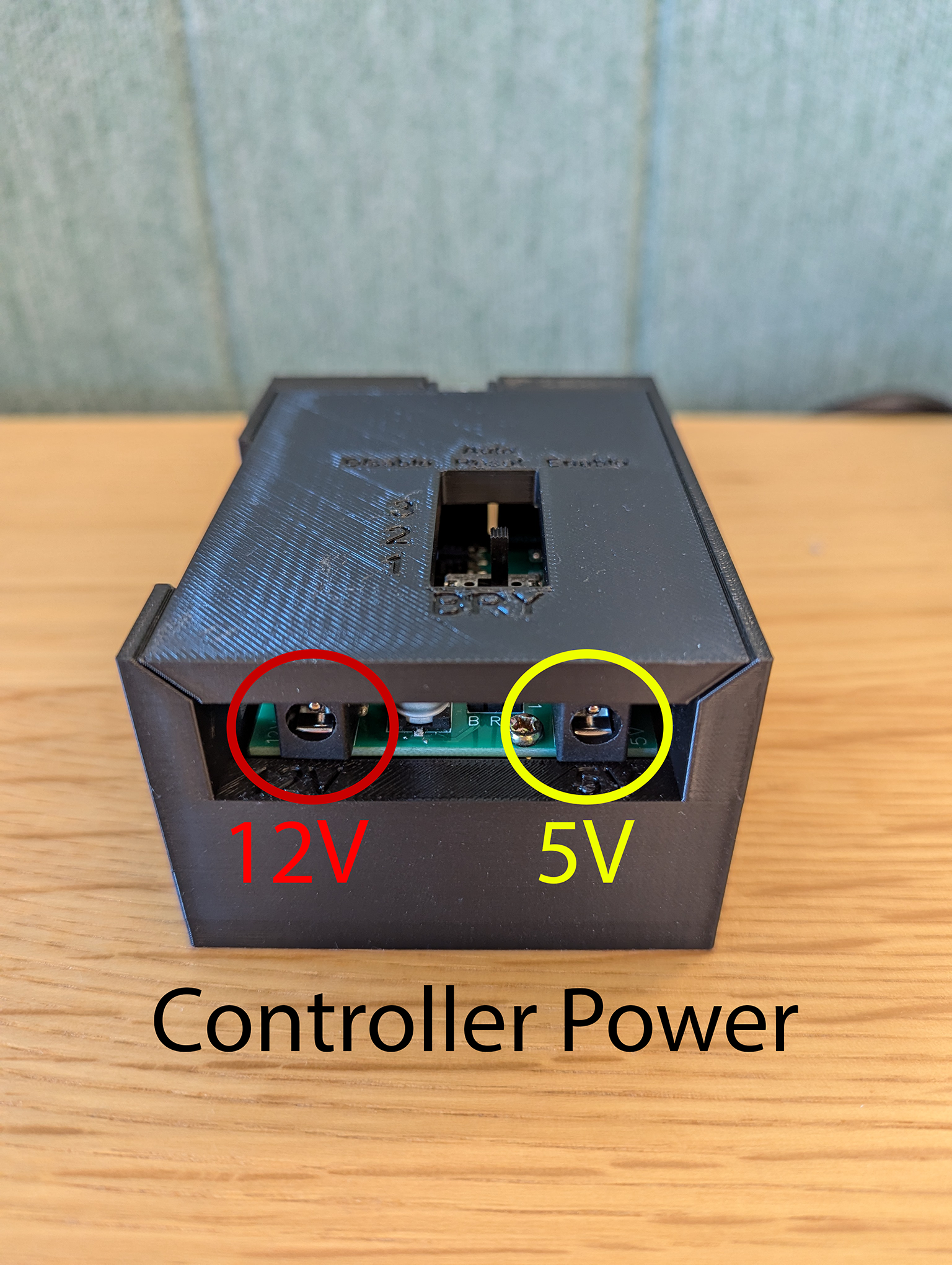
চিত্র 5. পাওয়ার অ্যাডাপ্টারের অবস্থান
আপনার আইটিএস-ইন-এ-বক্স বা সেন্সর ফিউশন বক্স লাইটগুলিকে একটি লাইটিং চ্যানেল আউটপুট জ্যাকের সাথে সংযুক্ত করুন (চিত্র 6)। আলোক শক্তির ব্যারেল ব্যবহারের উপর নির্ভর করে, প্রয়োজন অনুসারে একটি অ্যাডাপ্টার ব্যবহার করুন (চিত্র 7)।

চিত্র 6. আলো চ্যানেল আউটপুট অবস্থান

চিত্র 7. অ্যাডাপ্টার কন্ট্রোলারের সাথে আলোক শক্তি সংযোগ করছে
সেন্সর_ফিউশন দৃশ্যের জন্য সেট আপ করতে, সার্ভো চ্যানেল সংযোগ শিরোনামগুলির একটিতে সার্ভোকে সংযুক্ত করুন৷

চিত্র 8. সার্ভো সংযোগ অবস্থান
রিভিশন 3.0 কন্ট্রোলারের জন্য, কন্ট্রোলারটিকে একটি নতুন হোস্টের সাথে সংযুক্ত করার সময় স্বয়ংক্রিয় রিসেট সুইচটি
Enableতে সেট করতে হবে।রিভিশন 3.0-এর জন্য, কন্ট্রোলারে একটি স্বয়ংক্রিয় রিসেট সুইচ রয়েছে যা সক্ষম বা অক্ষম করা যেতে পারে। পরীক্ষা করার সময়, আমরা প্রতিটি পরীক্ষার শুরুতে সমস্ত আলো নিভে যাওয়া থেকে বিরত রাখতে অটো রিসেট সুইচটিকে
Disableপরামর্শ দিই কারণits_base_testআরডুইনো কন্ট্রোলারের সাথে যোগাযোগ স্থাপন করে। সমান্তরাল পরীক্ষা চালানোর সময় এটি গুরুত্বপূর্ণ (ITS একই কন্ট্রোলারের সাথে সংযুক্ত টেস্ট রিগ লাইটিং সিস্টেমের সাথে একযোগে চলছে)।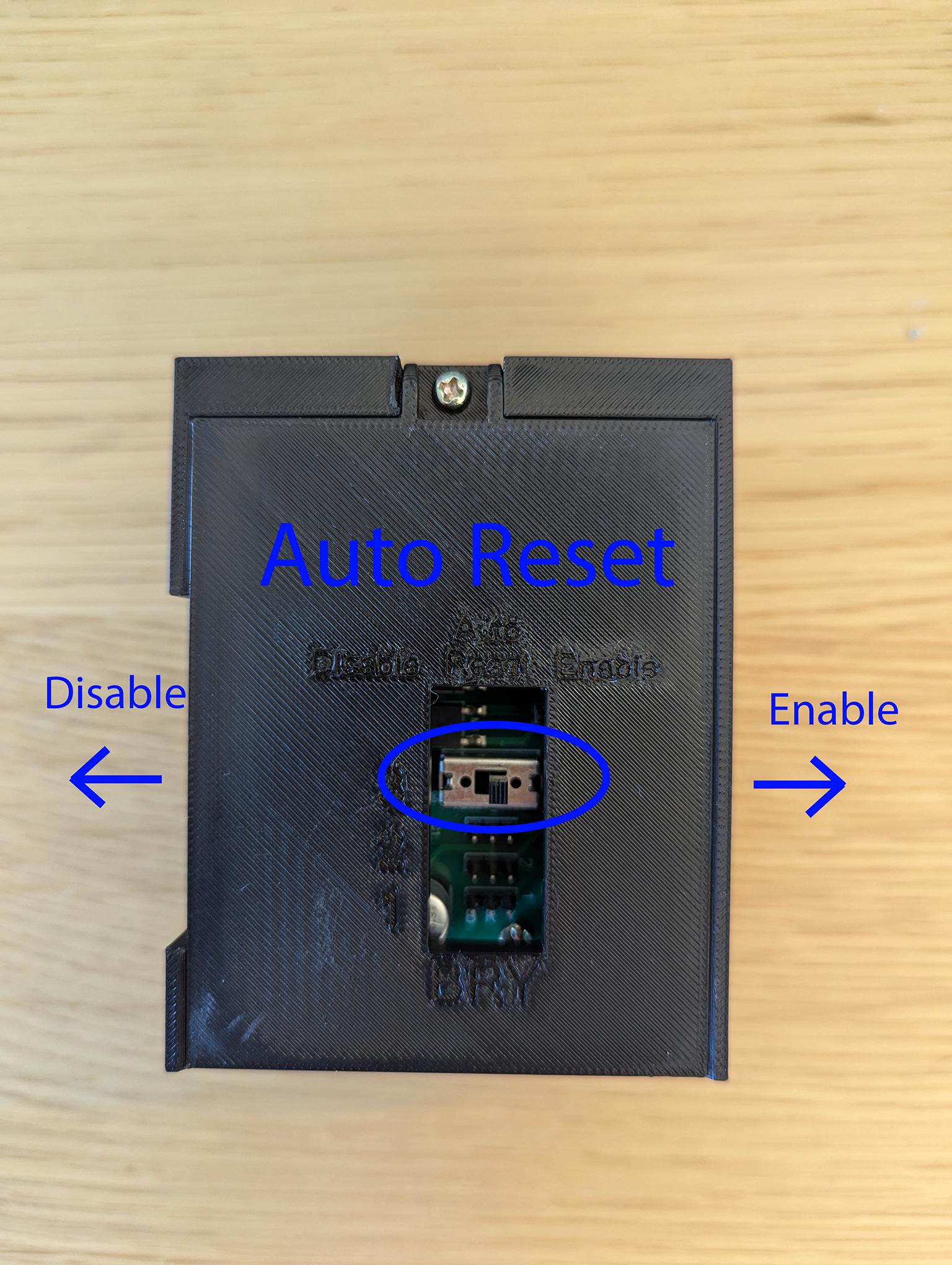
চিত্র 9. স্বয়ংক্রিয় রিসেট সুইচ
একটি USB-A তারের সাহায্যে কন্ট্রোলারটিকে হোস্টের সাথে সংযুক্ত করুন৷

চিত্র 10. হোস্ট করার জন্য USB-A সংযোগ পোর্ট
চিত্র 11 একটি লাইটিং সিস্টেম এবং সার্ভোর জন্য একটি সম্পূর্ণ Android 13 কন্ট্রোলার সেটআপের একটি উদাহরণ দেখায়।
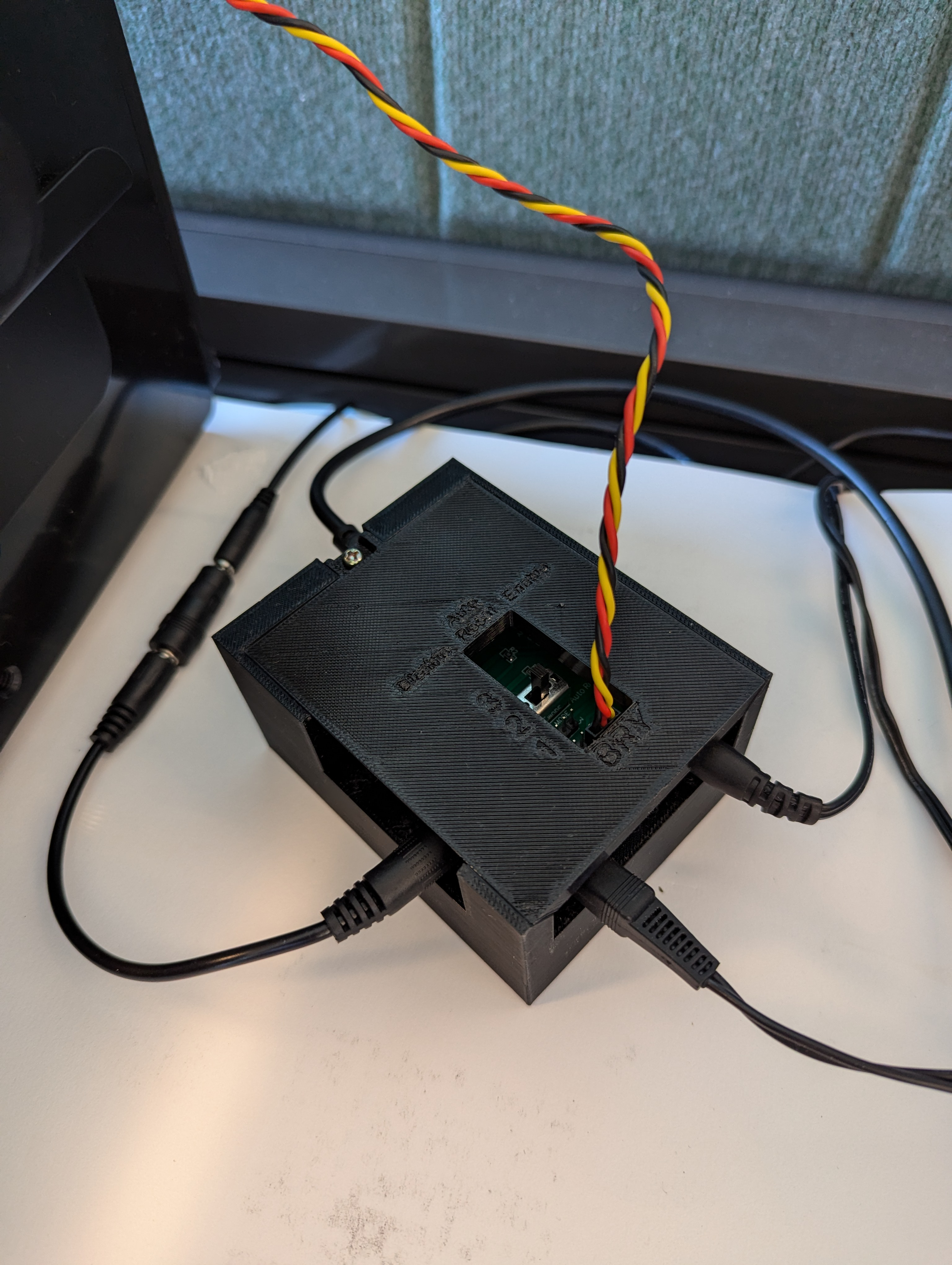
চিত্র 11। Android 13 কন্ট্রোলার সেটআপ সম্পূর্ণ হয়েছে
হোস্ট থেকে সফ্টওয়্যার নিয়ন্ত্রণ
মোটর সংকেতগুলিতে PWM পিনগুলি বরাদ্দ করতে এবং বিভিন্ন কোণের জন্য পালস-প্রস্থের রেঞ্জগুলি নির্ধারণ করতে মাইক্রো-কোডটি UNO-তে ডাউনলোড করা যেতে পারে। ছয়টি HS-755MB মোটরের সার্ভো ঘূর্ণন নিয়ন্ত্রণের জন্য মাইক্রো-কোড অন্যান্য সম্পদে অন্তর্ভুক্ত করা হয়েছে। সেই বিভাগে rotator.py নামক একটি সাধারণ প্রোগ্রামের একটি লিঙ্কও রয়েছে, যা সার্ভোগুলিকে ঘোরায়।
Android 13 কন্ট্রোলার ব্যবহার করে
ক্যামেরা এর ব্যবহার:
python tools/run_all_tests.py device=device_id camera=0 rot_rig=arduino:1 scenes=sensor_fusion
অন্তর্ভুক্ত পরীক্ষার স্ক্রিপ্ট সহ:
python rotator.py --ch 1 --dir ON --debug