
이 페이지에서는 센서 퓨전 테스트 장비의 움직임과 ITS-in-a-box의 조명을 제어하는 Android 13 컨트롤러를 조립하는 방법을 설명합니다. 센서 퓨전 테스트는 호환성 테스트 모음(CTS)의 카메라 이미지 테스트 모음(카메라 ITS)의 일부입니다. Android 13 컨트롤러는 회전과 조명 제어가 필요한 테스트 장면의 장비 조명과 서보 모터를 제어하여 자동화를 가능하게 합니다.
Android 13 컨트롤러 개요
ITS-in-a-box는 테스트 태블릿과 테스트 휴대전화 간의 거리가 고정된 일관된 테스트 환경을 제공하며 외부 광원 없이 일관된 조명도 제공합니다. Android 13 컨트롤러는 서보 제어와 조명 제어를 모두 자동화하므로 센서 퓨전 장면 테스트를 위해 DUT를 수동으로 회전하거나 조명 제어 테스트를 위해 조명을 수동으로 켜거나 끌 필요가 없습니다.
테스트 장비의 서보 및 조명 제어
센서 퓨전 테스트 장비는 재현 가능한 테스트를 위해 고정된 휴대전화 모션을 제공합니다. 다양한 위치에서 휴대전화를 이용해 이미지를 캡처할 수 있도록 격자무늬 타겟 앞에서 휴대전화가 회전합니다. test_sensor_fusion의 경우 서보는 약 2초간 휴대전화를 카메라 중심축에서 90도 회전시켰다가 제자리로 되돌립니다. test_video_stabilization의 경우 서보는 걸으면서 동영상을 찍을 때 휴대전화의 움직임을 모방하도록 휴대전화를 반복적으로 카메라 중심축에서 10도 회전시켰다가 제자리로 되돌립니다. 그림 1은 센서 퓨전 테스트 장비에서 이동하는 휴대전화 2대를 보여줍니다. 그림 2는 센서 퓨전 테스트 장비에서 이동하는 휴대전화 1대를 보여줍니다.
그림 1. test_sensor_fusion의 경우 테스트 장비에서 휴대전화 이동

그림 2. test_video_stabilization의 경우 테스트 장비에서 휴대전화 이동
서보 모터 제어
테스트 장비의 아날로그 서보 모터는 펄스 폭 변조(PWM)를 사용하여 제어되는 위치 서보입니다. 그림 3은 일반적인 위치 제어 예를 보여줍니다. 제어 신호 주기는 20밀리초입니다. 펄스 폭을 최소 너비로 하면 모터가 중립 위치로 이동하고 펄스 폭을 최대 너비로 하면 모터가 시계 방향으로 180도 이동합니다.
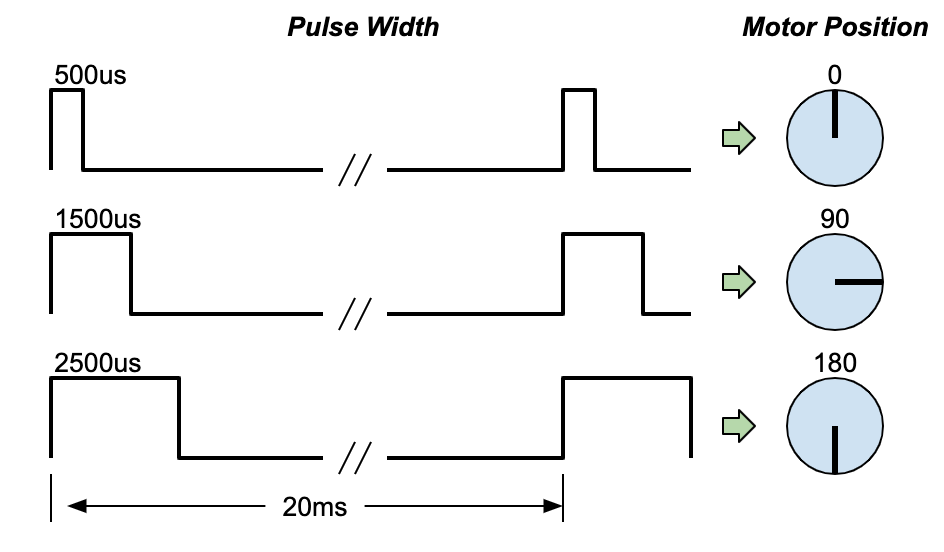
그림 3. 일반적인 서보 제어 설명
조명 제어
호스트 컴퓨터를 사용하여 서보 모터 모션과 조명을 제어하려면 센서 퓨전 테스트 장비에 USB를 연결해야 합니다. Android 13 컨트롤러는 맨 위에 맞춤 라우팅 보드(또는 실드)가 마운트된 USB 연결 Arduino UNO R3 보드를 사용합니다. Android 13 컨트롤러는 단일 호스트 컴퓨터로 최대 3개의 센서 퓨전 장비 로테이터 서보와 최대 3개의 ITS-in-a-box 조명 시스템 또는 하나의 센서 퓨전 장비를 제어할 수 있습니다.
버전 3.0 Android 13 컨트롤러를 사용하면 Arduino 직렬 포트가 USB를 통해 열릴 때 사용자가 자동 재설정을 사용 중지할 수 있습니다. 자동 재설정 기능은 컨트롤러가 다른 호스트에 연결되거나 다른 테스트 사례에 사용될 때 사용 설정됩니다. 사용자는 컨트롤러의 물리적 스위치를 사용하여 자동 재설정을 사용 설정하거나 사용 중지할 수 있습니다.
Android 13 컨트롤러는 어떤 카메라 ITS-in-a-box와도 호환됩니다. 카메라 ITS-in-a-box(RFoV, WFoV, 모듈식) 또는 센서 퓨전 상자에 Android 13 컨트롤러를 연결하여 조명 제어 테스트를 실행할 수 있습니다. Android 15부터 모든 조명 제어 테스트가 scene_flash에 포함되며 센서 퓨전 상자를 사용하여 실행할 수 있습니다. 단, 차트 표시를 위해 태블릿이 필요하고 카메라 ITS-in-a-box를 사용하여 실행해야 하는 scene_low_light는 예외입니다.
scene_flash와 scene_low_light 테스트의 경우 테스트 휴대전화에서 자동 플래시 기능을 트리거하려면 조명이 꺼진 어두운 환경이 필요합니다. 그림 4는 Android 13 컨트롤러에서 ITS-in-a-box의 조명을 껐다 켜는 모습을 보여줍니다.
그림 4. test_auto_flash의 경우 조명 껐다 켜기
업데이트 기록
다음 표에는 Android 13 컨트롤러의 업데이트 기록이 설명되어 있으며 프로덕션 파일의 각 버전에 대한 다운로드 링크가 포함되어 있습니다.
| 날짜 | 버전 | 프로덕션 파일 다운로드 | 변경 로그 |
|---|---|---|---|
| 2024년 8월 | 3.0 |
|
|
| 2022년 12월 | 2.2 |
|
|
| 2022년 3월 | 1 |
|
Android 13 컨트롤러 설정
이 섹션에서는 Android 13 컨트롤러 설정 방법을 설명합니다.
필수 구성요소
Android 13 컨트롤러는 Google 공인 공급업체를 통해 구매하거나 직접 컨트롤러를 빌드할 수 있습니다. 프로덕션 파일은 PCB Gerber 파일과 PCB 자재명세서(BOM), PCB 배치 정보, 인클로저 STEP 파일로 구성됩니다. 프로덕션 파일을 다운로드하려면 업데이트 기록의 표를 참고하세요.
직접 컨트롤러를 빌드한다면 Arduino UNO R3 보드가 있어야 합니다. 공인 공급업체를 통해 컨트롤러를 구매하는 경우에는 Arduino가 포함되어 있습니다.
Android 13 컨트롤러 인클로저는 선택사항이지만 권장되는 구성요소입니다. 컨트롤러를 보호하고 사용되지 않는 USB 포트를 차단하여 설정 오류를 방지합니다. 컨트롤러의 가격과 옵션에 관한 자세한 내용은 공인 공급업체에 문의하세요.
설정 절차
Android 13 컨트롤러를 설정하려면 다음 단계를 따르세요.
12V(조명용)와 5V(서보용) 어댑터를 해당 전원 잭에 연결합니다(그림 5).
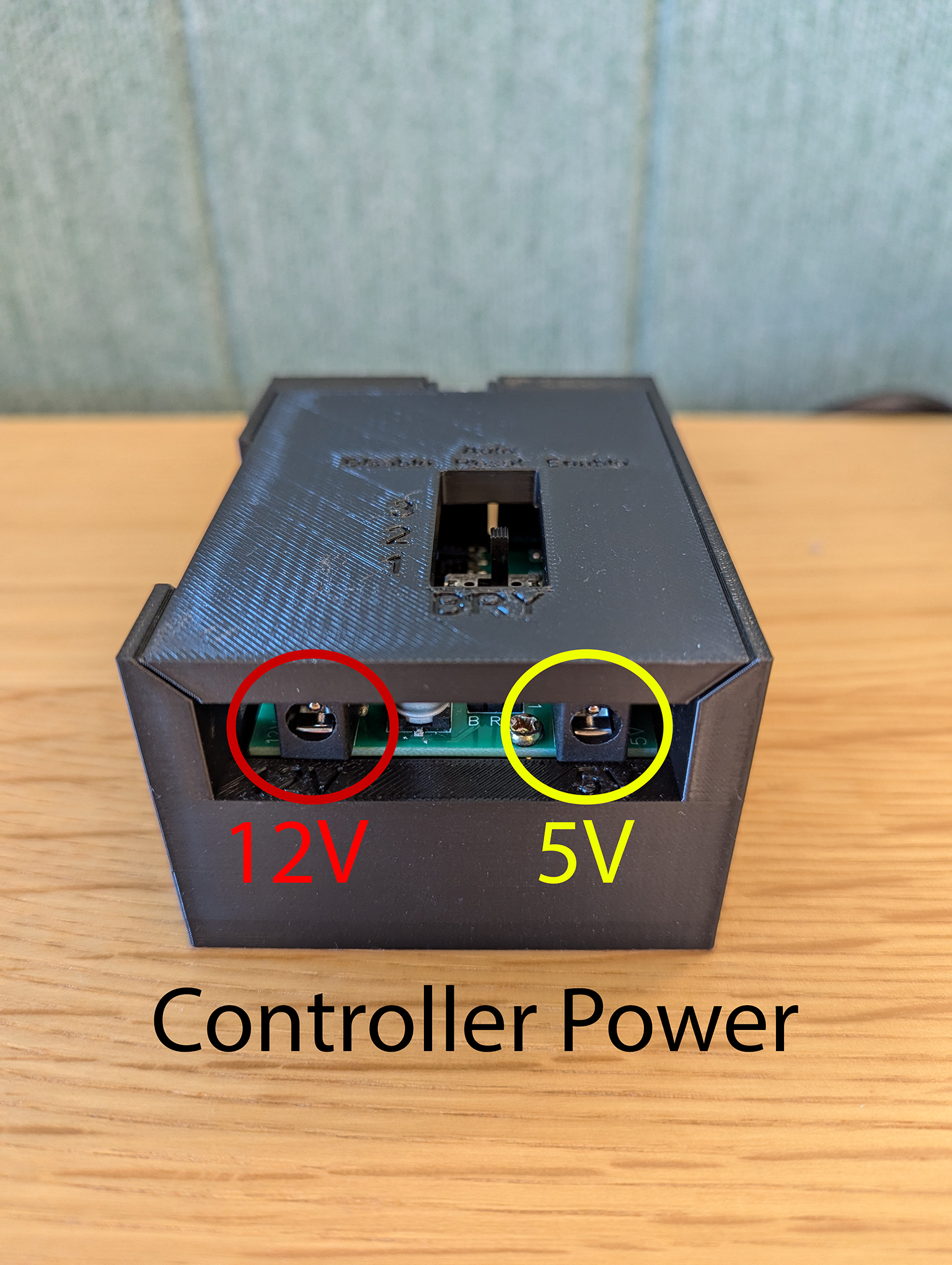
그림 5. 전원 어댑터 위치
ITS-in-a-box 또는 센서 퓨전 상자 조명을 조명 채널 출력 잭 중 하나에 연결합니다(그림 6). 조명 전원의 배럴 사용에 따라 필요한 경우 어댑터를 사용합니다(그림 7).

그림 6. 조명 채널 출력 위치

그림 7. 조명 전원을 컨트롤러에 연결하는 어댑터
sensor_fusion 장면을 설정하려면 서보를 서보 채널 연결 헤더 중 하나에 연결합니다.

그림 8. 서보 연결 위치
버전 3.0 컨트롤러의 경우 컨트롤러를 새 호스트에 연결할 때 자동 재설정 스위치를
Enable로 설정해야 합니다.버전 3.0 컨트롤러에는 사용 설정하거나 사용 중지할 수 있는 자동 재설정 스위치가 포함되어 있습니다. 테스트할 때는 자동 재설정 스위치를
Disable로 설정하는 것이 좋습니다.its_base_test가 Arduino 컨트롤러와의 통신을 설정할 때 각 테스트 시작 시 모든 조명이 잠시 꺼지는 것을 방지할 수 있습니다. 이는 병렬 테스트(동일한 컨트롤러에 연결된 테스트 장비 조명 시스템과 동시에 실행되는 ITS)를 실행할 때 중요합니다.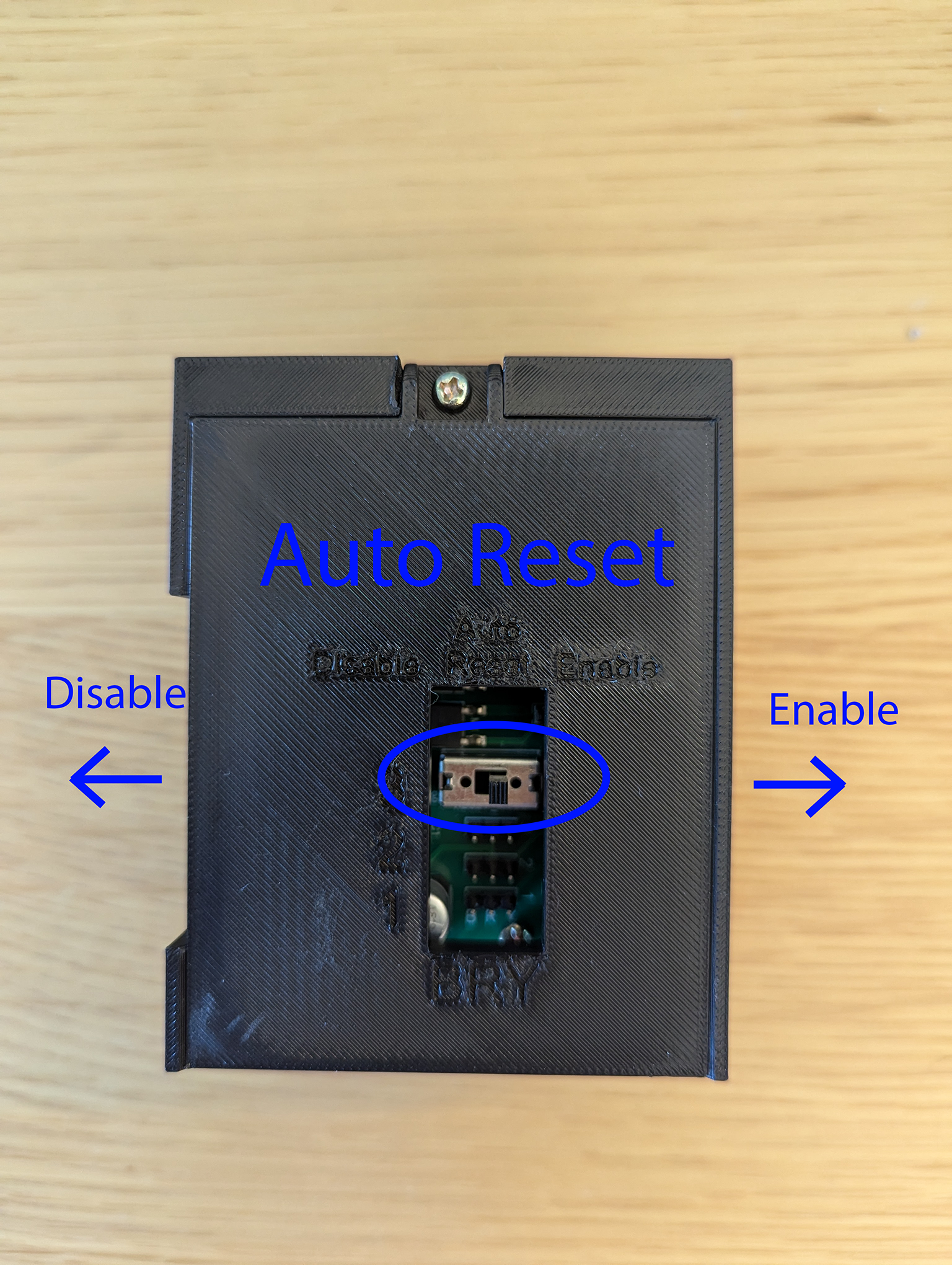
그림 9. 자동 재설정 스위치
USB-A 케이블을 사용하여 컨트롤러를 호스트에 연결합니다.

그림 10. 호스트에 대한 USB-A 연결 포트
그림 11은 하나의 조명 시스템과 서보에 대해 Android 13 컨트롤러 설정이 완료된 예를 보여줍니다.
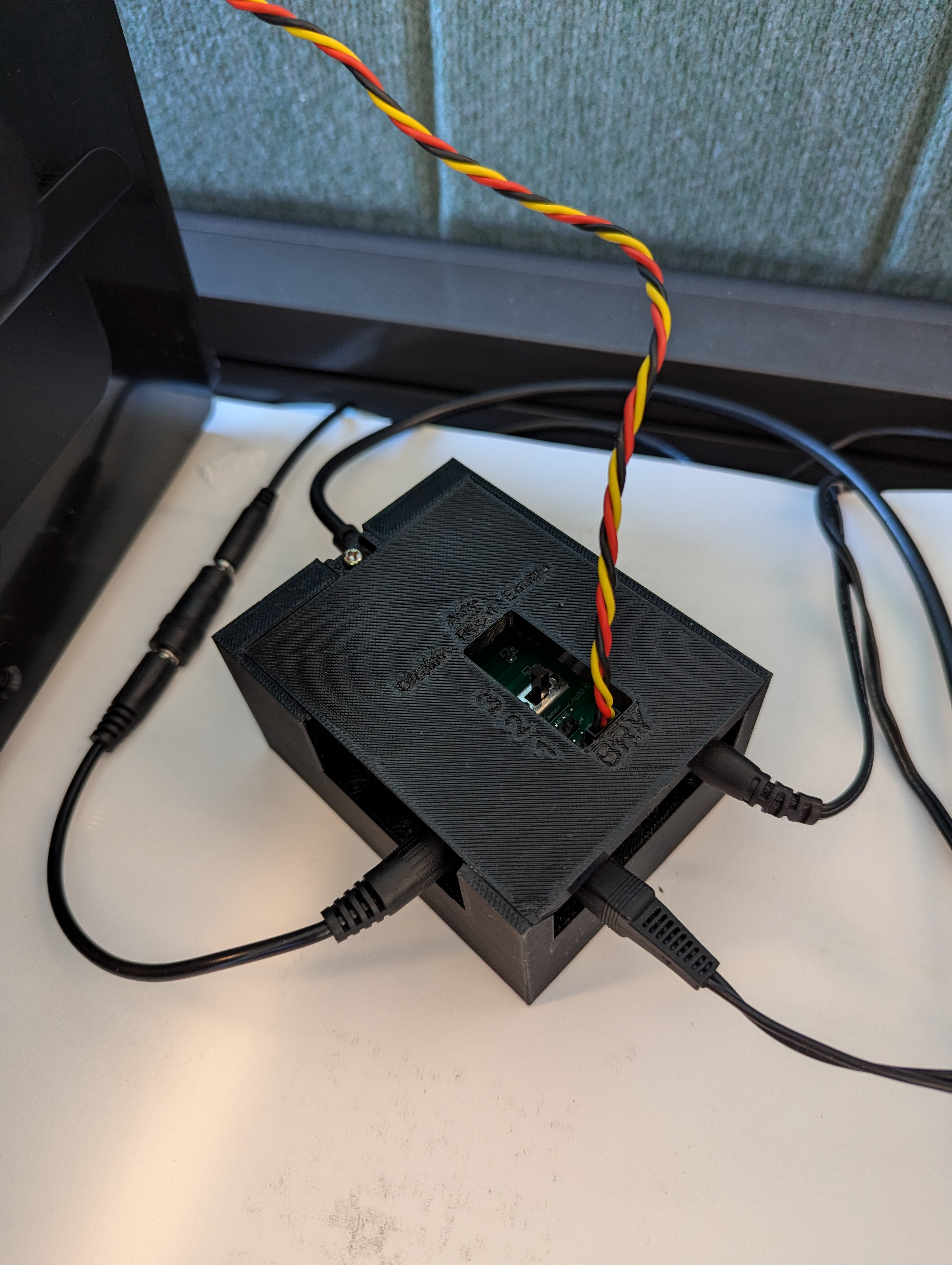
그림 11. 완료된 Android 13 컨트롤러 설정
호스트에서 소프트웨어 제어
마이크로 코드를 UNO에 다운로드하여 PWM 핀을 모터 신호에 할당하고 다양한 각도에 맞는 펄스 폭 범위를 정의할 수 있습니다. 6개의 HS-755MB 모터의 서보 회전 제어용 마이크로 코드는 기타 리소스에 포함되어 있습니다. 이 섹션에는 서보를 회전하는 rotator.py라는 간단한 프로그램 링크도 포함되어 있습니다.
Android 13 컨트롤러 사용
카메라 ITS 사용:
python tools/run_all_tests.py device=device_id camera=0 rot_rig=arduino:1 scenes=sensor_fusion
포함된 테스트 스크립트 사용:
python rotator.py --ch 1 --dir ON --debug