
本頁說明如何購買或組裝感應器融合盒。感應器融合盒用於 CameraITS sensor_fusion 測試和multi-camera同步測試。這項工具可為 Android 裝置的感應器 (特別是攝影機影像感應器和陀螺儀) 提供一致的測試環境,以測量時間戳記準確度。當中包含從電腦輔助設計 (CAD) 圖面雷射切割而成的塑膠盒元件,以及伺服控制盒。
你可以購買感應器融合盒,也可以自行建構。
購買感應器融合盒
建議您向下列合格供應商購買感應器融合盒。
Byte Bridge Inc.
美國:1502 Crocker Ave, Hayward, CA 94544-7037
中國:上海市徐匯區中山西路 1600 號宏匯國際廣場 A 座 22 樓 06-08 室,200235
www.bytebt.com
androidpartner@bytebt.com
美國:+1-510-373-8899
中國:+86-400-8866-490JFT CO LTD 捷富通科技有限公司 (前身為 MYWAY DESIGN)
中國:中國上海市閔行區吳涇鎮和艾路 22 弄 40 號
臺灣:4F., 臺灣新北市新莊區福營路 163 號 (郵遞區號:242)
www.jftcoltd.com
service@jfttec.com 或 its.sales@jfttec.com
中國:+86-021-64909136
臺灣:886-2-29089060
建構感應器融合盒
本節提供逐步說明,教您如何使用雷射切割的丙烯腈丁二烯苯乙烯 (ABS) 元件組裝感應器融合盒 (如圖 1 所示)。
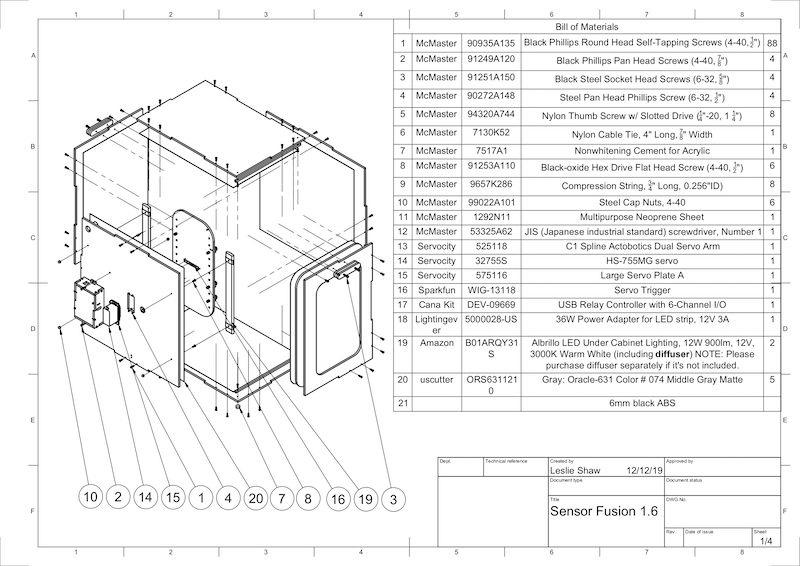
圖 1. 感應器融合盒元件的機械圖
必要工具
開始前,請確認您已下載 Sensor Fusion Box 的技術圖 (包含在 Sensor Fusion Box ZIP 檔案中),並備妥下列工具:
- 十字型螺絲起子
- JIS 頭螺絲起子
- 內六角扳手
- 電鑽組
- 美工刀
- 膠帶
步驟 1:貼上乙烯基貼紙
使用雷射切割機製作 ABS 元件後,請將乙烯基貼紙貼到塑膠盒上,以便適當控制測試盒內部的顏色:
如圖 2 所示,將貼紙貼在 ABS 平滑的一面。如需如何貼上貼紙的實用提示,請參閱 wikiHow。
用美工刀在乙烯基上切出必要的孔洞。

圖 2. ABS 片,平滑面貼上乙烯基 (盒子內部)使用壓克力膠,將圓形 ABS 片黏在底板的四個角落。
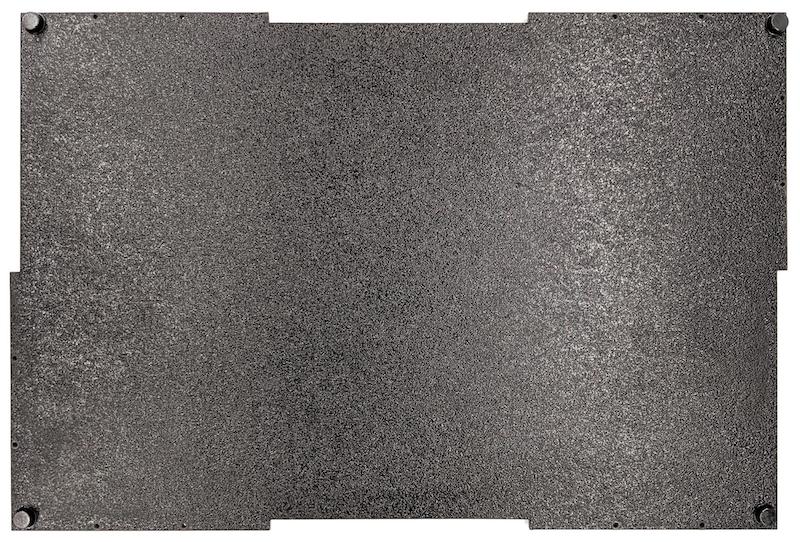
圖 3:底板,四個角落黏有圓形 ABS 片。
步驟 2:準備手機支架並裝上伺服機支架
準備將手機支架連接至伺服機:
使用 1/4 吋 - 20 鑽頭,在手機固定架上鑽 20 個孔。
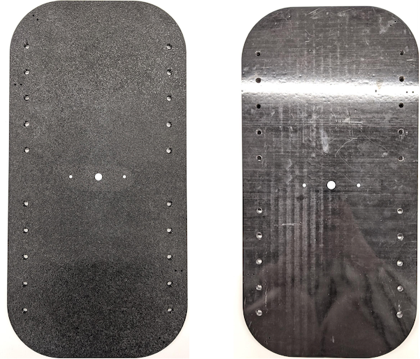
圖 4. 有攻牙孔的手機固定座請確認你備妥 ABS 切口、尼龍蝶形螺絲、尼龍螺帽 (視需要調整螺絲高度)、C1 樣條、Actobotics 雙伺服臂、4-40 螺絲和壓縮彈簧。

圖 5. 手機支架零件裝上 4-40 螺絲並鎖緊 (1.2 N*m 或 8.9 in*lbf),將伺服臂固定在手機支架背面。使用相同的螺絲和 4-40 蓋形螺帽,將手機隔板 ABS 凹口鎖緊在手機支架正面。
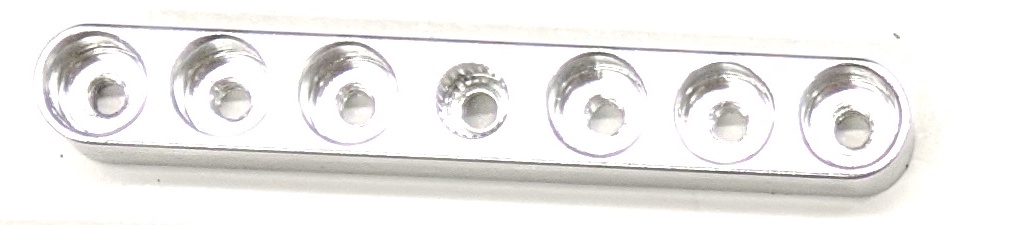
圖 6. 燈具背面的軸,從正面鎖緊螺絲
圖 7. 4-40 3/4 吋長螺絲和 4-40 蓋頭螺帽
圖 8. 手機支架的背面 (左) 和正面 (右)
步驟 3:裝上手機夾
如何安裝手機夾:
根據 ABS 凹口夾鉗的形狀剪裁氯丁橡膠片,但兩端要各縮短一英吋,如圖 9 所示。將氯丁橡膠片裁切成適當大小後,如圖 8 所示,將裁切好的氯丁橡膠片貼到 ABS 夾鉗的凹槽。

圖 9. 已套用氯丁橡膠片的 ABS 夾鉗將尼龍蝶型螺絲和彈簧線固定到夾鉗。視需要新增尼龍螺帽,縮短螺絲長度。

圖 10. 夾鉗,附有氯丁橡膠片、蝶形螺絲、尼龍螺帽和彈簧線如圖 11 所示,將手機夾鉗的蝶形螺絲旋入手機固定座的螺紋孔。你可以根據手機大小調整手機支架的位置。
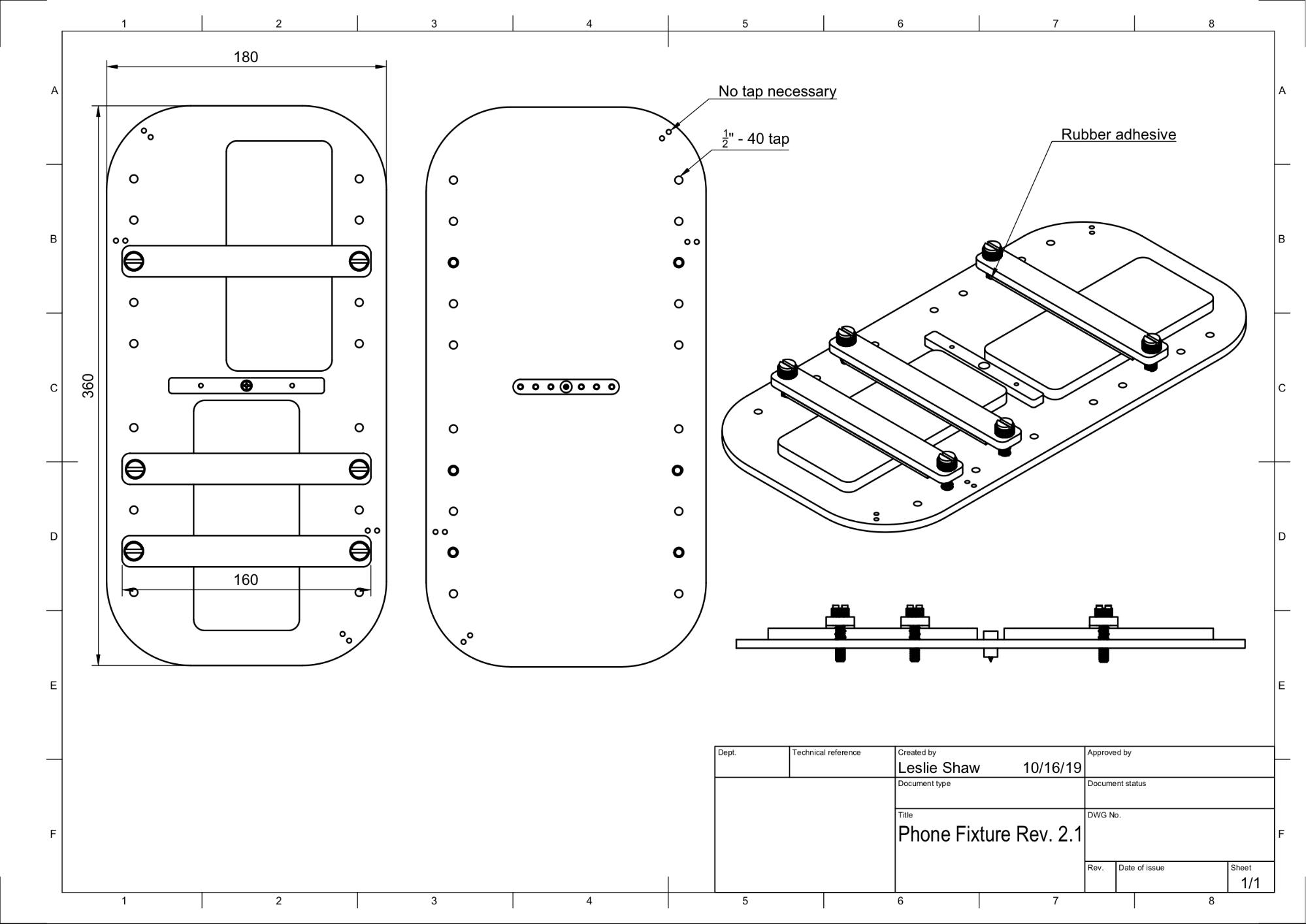
圖 11. 手機固定座的機械圖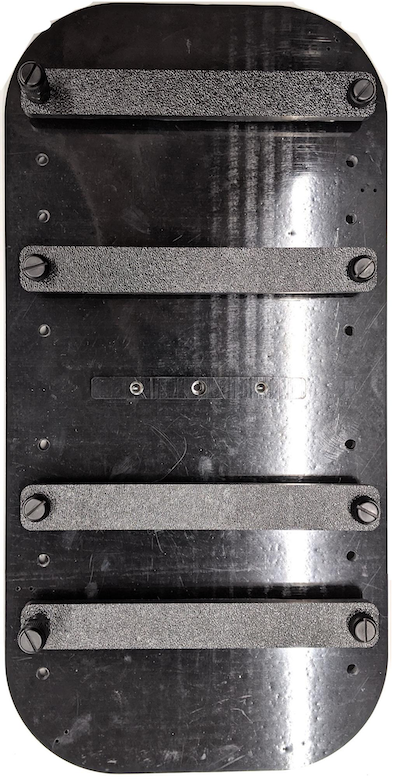
圖 12. 組裝好的手機固定座
步驟 4:組裝滑門軌道
將盒子頂部和底部的滑動面板軌道朝向前方固定。 圖 13 顯示預先攻牙孔上的 6-32 螺絲。或者,您也可以使用自攻螺絲。
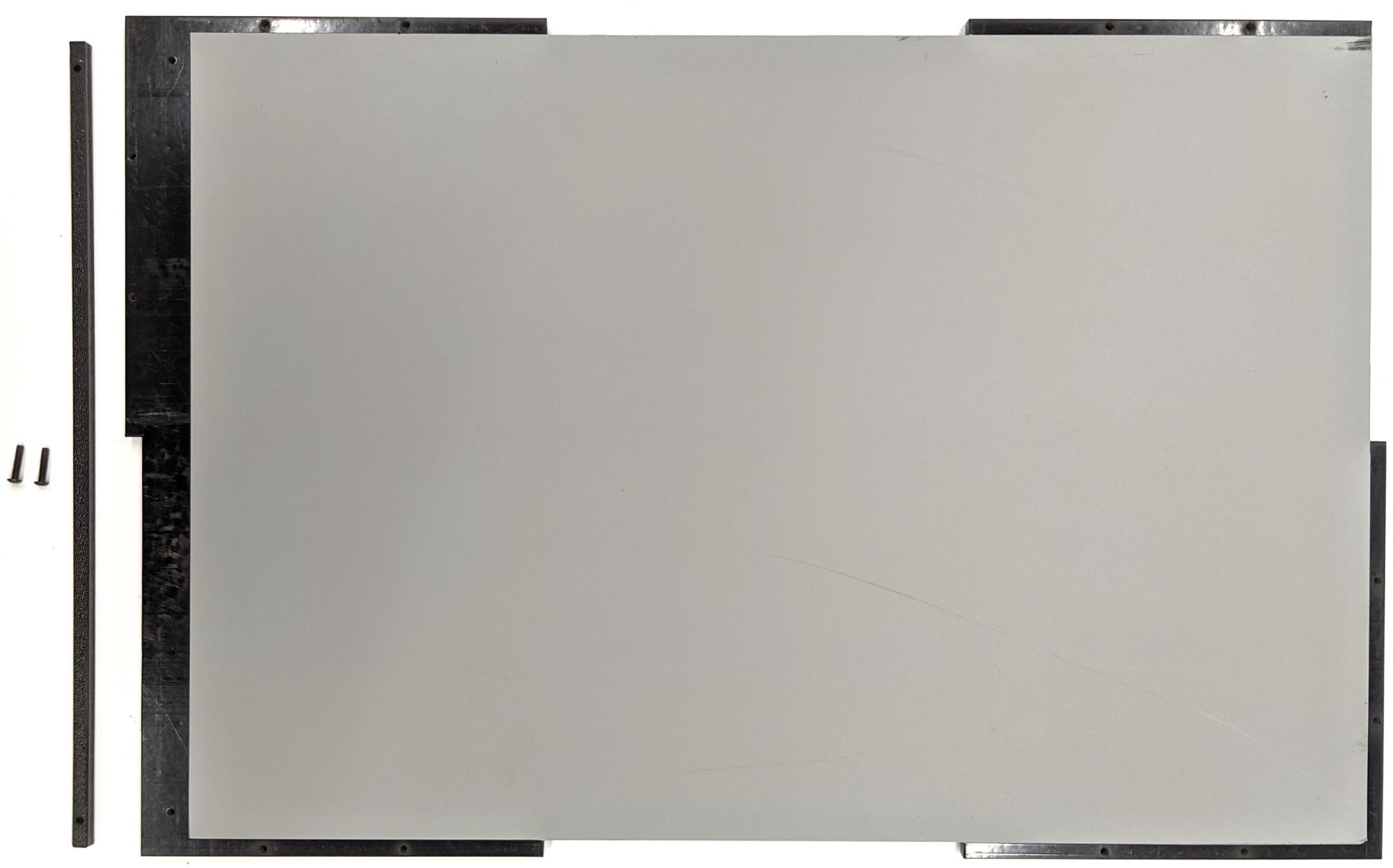
圖 13. 固定式滑動面板軌道位於盒子的頂端和底部
步驟 5:裝上燈具
如要安裝燈架和柔光罩,請按照下列步驟操作:
將兩個把手零件堆疊在一起,然後使用 6-32 螺絲 (或自攻螺絲) 組裝。

圖 14. 感應器融合盒把手零件和組裝準備四個 4-40 螺絲、螺帽和圓頭螺帽,將照明套件的固定支架固定在盒子的牆上。
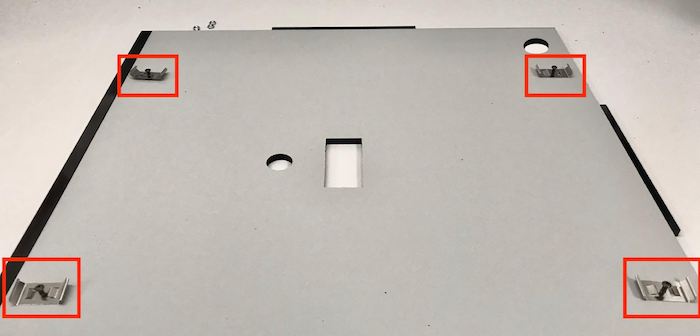
圖 15. 盒子內牆上的 4-40 螺絲和燈架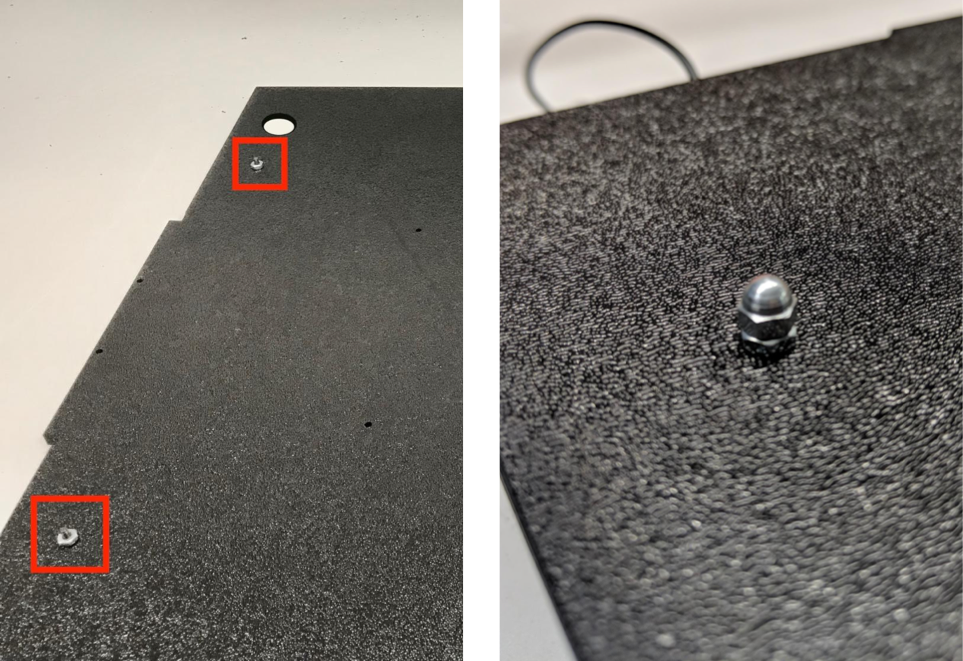
圖 16. 從包裝盒外部將螺栓和圓頭螺栓套在螺絲上將光線擴散器剪成適當大小,包覆燈條 (如果燈條隨附擴散器,則不需此步驟)。

圖 17. 燈條和光擴散器將燈罩包覆在燈條上,並在背面用膠帶固定。

圖 18. 從背面貼上的燈條和光擴散片將燈具扣入支架 (可能需要用力才能扣入)。
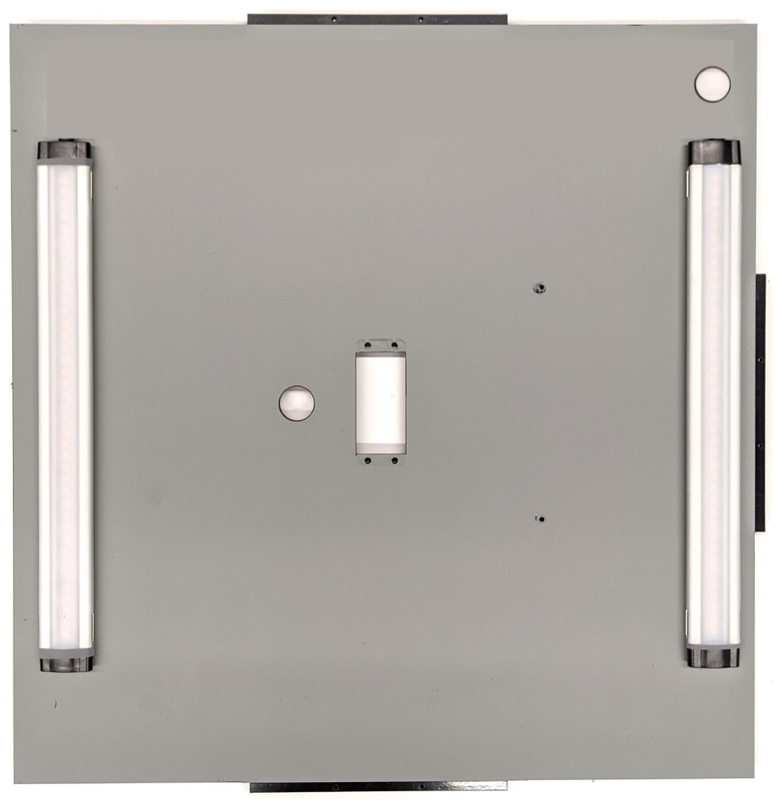
圖 19. 以支架安裝的燈具
步驟 6:將手機固定架連接至伺服板
如何將手機固定架連接到伺服板:
準備四個 6-32 螺絲和一個伺服板,將伺服器固定在牆上。 將伺服器固定在內牆上,然後從內側將螺絲旋進外牆上的伺服器板。
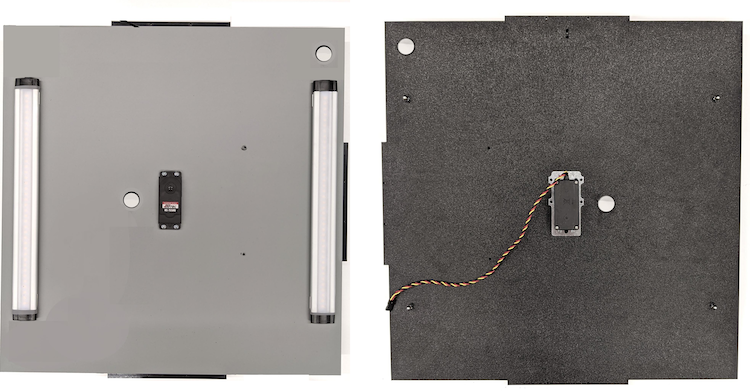
圖 20. 以 6-32 螺絲固定伺服器和伺服器板使用尼龍鎖將手機固定裝置固定在伺服機上 (將軸心中心推入伺服機的旋轉中心)。

圖 21. 伺服齒輪
使用隨附的伺服螺絲,透過伺服臂將手機固定架鎖到伺服齒輪上 (1.2 N*m 或 8.9 in*lbf)。
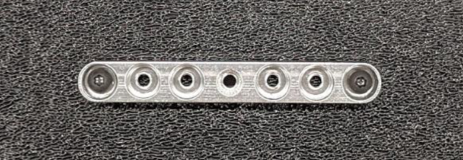
圖 22. 伺服臂
步驟 7:最後組裝
如要完成感應器融合盒的組裝:
從 Android 13 開始,感應器融合測試裝置會隨附 Android 13 Arduino 燈光控制器。(在 Android 12 以下版本中,感應器融合裝置隨附 6 通道 Arduino 控制器或 Canakit 控制器。搭載 Android 11 至 Android 12 的裝置與 Android 13 控制器、6 通道 Arduino 控制器或 Canakit 控制器相容。將伺服機擴充功能連接至伺服機控制器的任一通道,其中 GND 對應黑線、VCC 對應紅線,而 SIG 對應黃線。
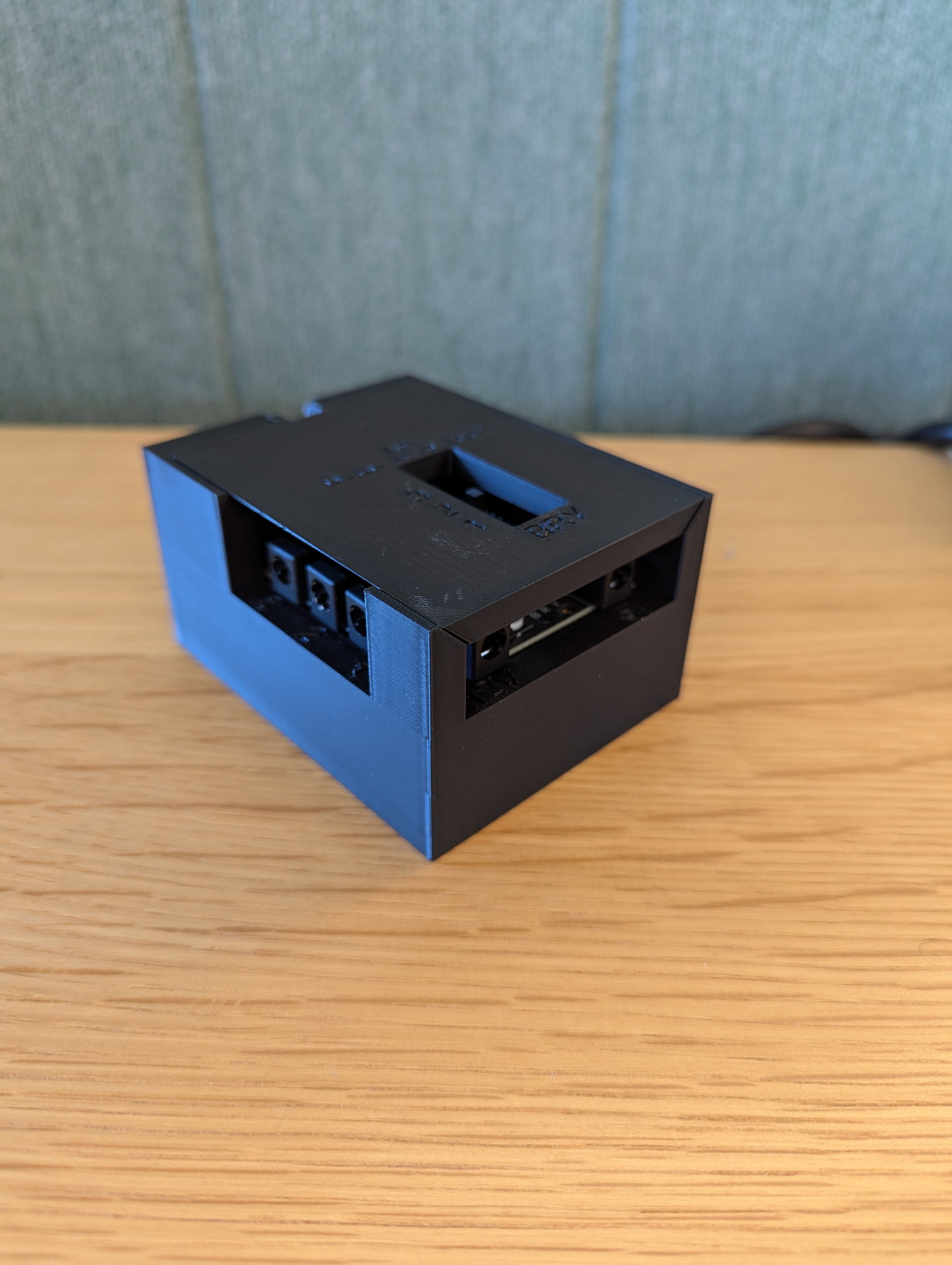
圖 23. Arduino 照明控制器 Rev3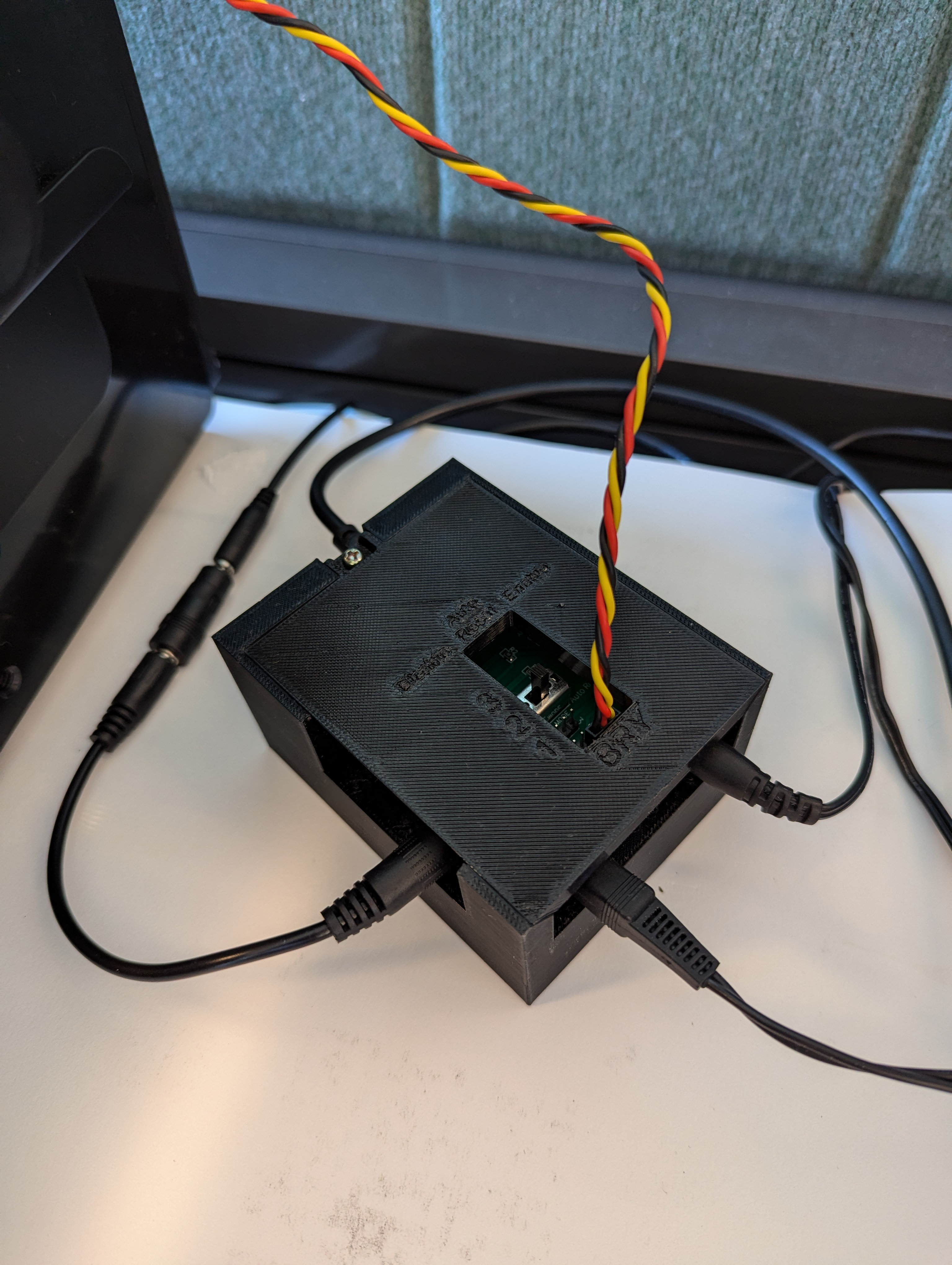
圖 24. Arduino 照明控制器 Rev3 連線範例用膠帶將盒子黏合,然後用螺絲將零件鎖在一起 (你可能需要在某些零件上預先鑽孔)。
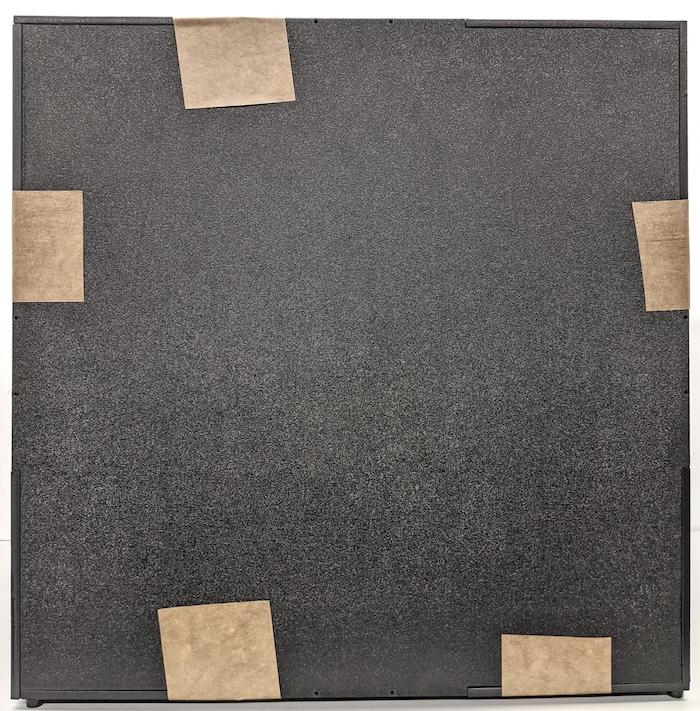
圖 25. 以膠帶固定的感應器融合測試裝置
如果是 Android 15 以上版本,請與當地印刷店合作,在 18 x 18 英吋的紙張上印出棋盤格圖案 (寬度與紙張相同),並將圖表貼在手機固定架對面的牆上。棋盤格圖案位於程式碼庫的
test/sensor_fusion目錄中,檔案名稱為 checkerboard.pdf。如果攝影機的視野較小 (例如望遠攝影機),請與當地印刷店合作,製作比例縮放的棋盤格。(舉例來說,如果圖表縮放比例為 50%,則會印在 9 x 9 英吋的紙張上)。
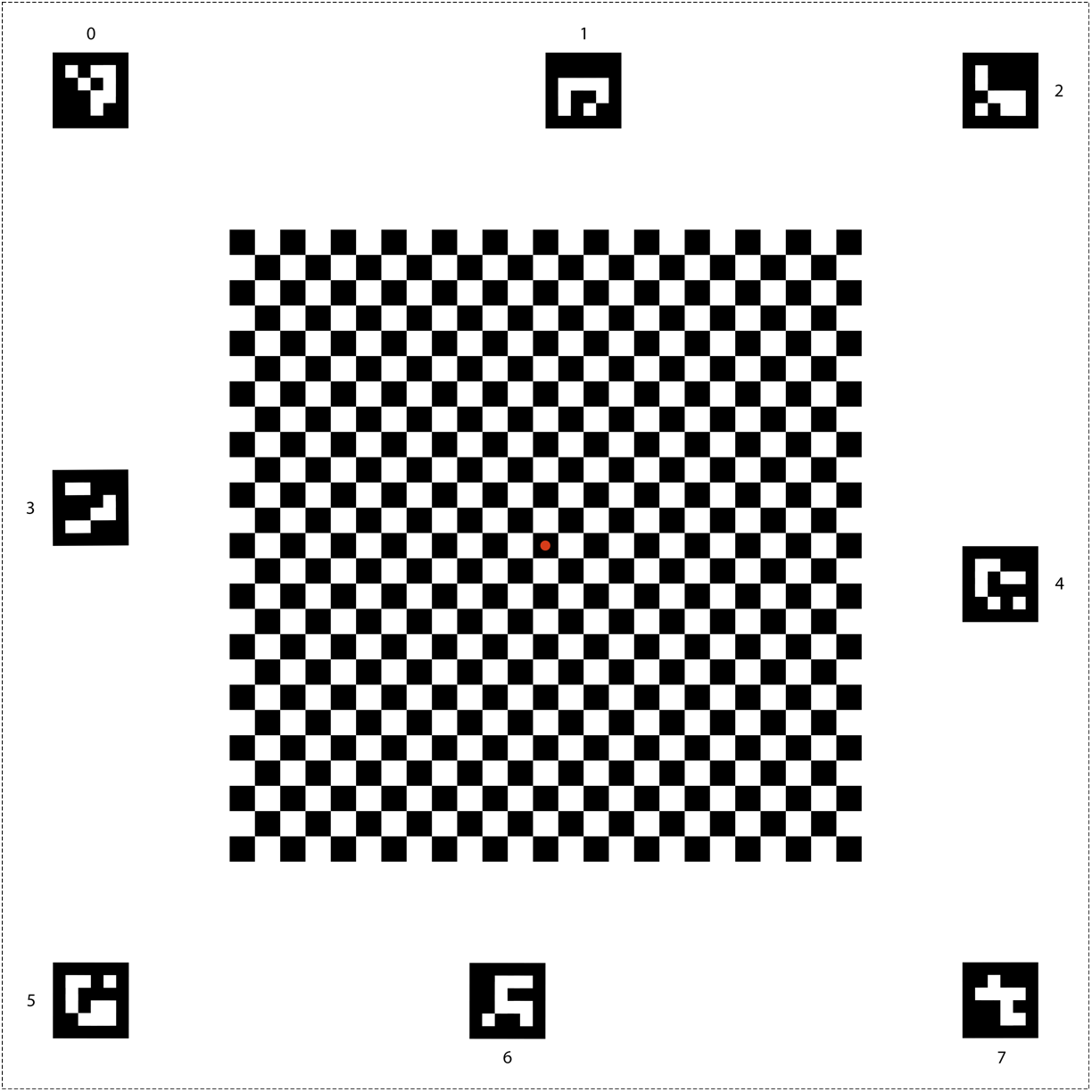
圖 26. 適用於 Android 15 以上版本的棋盤格圖表。
如圖 27 所示,將棋盤格放在固定架上時,請確保棋盤格中央的紅點直接朝向攝影機。
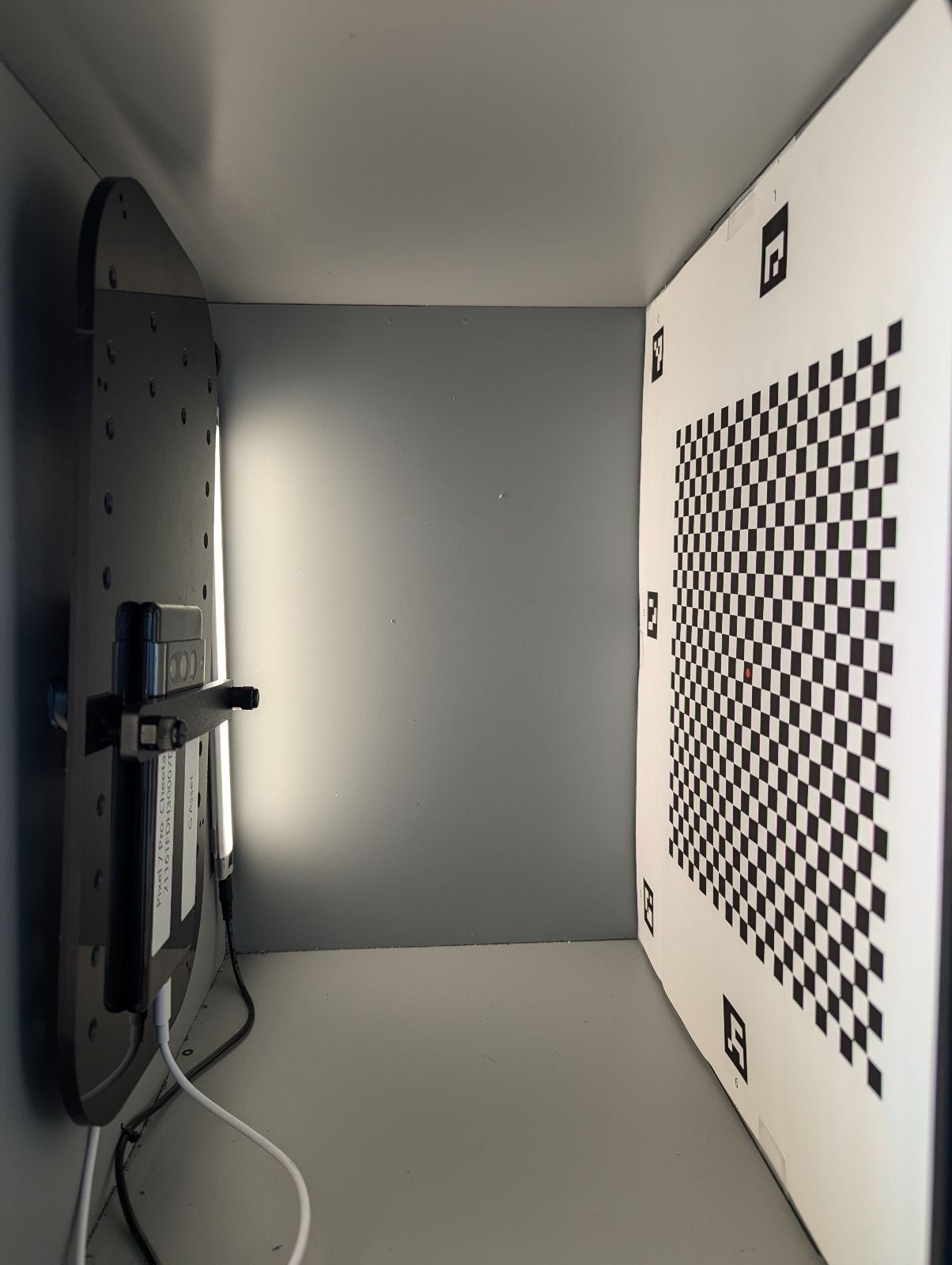
圖 27. 棋盤格圖案印在紙上,並貼在手機固定架對面的牆上。