
Bu sayfada, Android Uyumluluk Test Paketi (CTS) Doğrulayıcı'nın bir parçası olan Kamera Görüntüsü Test Paketi (ITS) kapsamındaki testlerin kapsamlı bir listesi verilmektedir. ITS testleri işlevsel testlerdir. Bu nedenle, görüntü kalitesini ölçmez ancak reklamı yapılan tüm kamera işlevlerinin beklendiği gibi çalıştığını ölçer. Bu belge, geliştiricilerin ve test uzmanlarının tek tek testlerin ne yaptığını ve test hatalarında nasıl hata ayıklayacaklarını anlamalarını sağlar.
Android 17 ve sonraki sürümlerde, paralel yürütmeye olanak tanımak ve test süresini kısaltmak için Kamera ITS testleri CTS Verifier'da iki etkinliğe ayrılır: feature_combination ve sensor_fusion testleri için bir etkinlik, diğer tüm testler için ise başka bir etkinlik.
Kamera ITS, testleri gerekli kamera özellikleri, API düzeyi ve medya performansı sınıfı (MPC) düzeyine göre filtreler. ITS, API düzeyi için belirli bir API düzeyinde eklenen ve daha düşük API düzeylerindeki işlevlerde olumsuz kullanıcı deneyimlerini test eden testleri sınırlamak amacıyla ro.product.first_api_level kullanır. ITS, belirli bir API düzeyinde eklenen ve yeni donanım özelliği gerektiren özelliklerin testlerini kontrol etmek için ro.vendor.api_level kullanır. Bir cihaz için
ro.odm.build.media_performance_class tanımlanmışsa ITS, MPC düzeyine bağlı olarak belirli testlerin çalıştırılmasını gerektirir.
Testler sahneye göre gruplandırılır ve aşağıdaki bölümlere ayrılır:
scene0: Meta verileri, titreşimi, jiroskopu ve titreşimi yakalamascene1: Pozlama, hassasiyet, pozlama değeri (EV) telafisi, YUV ve JPEG ile RAWscene2: Yüz algılama, renkli sahneler gerektiren testlerscene3: Kenar geliştirme, lens hareketiscene4: En-boy oranı, kırpma, görüş alanıscene6: Yakınlaştırmascene7: Çoklu kamera anahtarıscene8: Otomatik pozlama (AE) ve otomatik beyaz dengesi (AWB) bölge ölçümüscene9: JPEG sıkıştırmasıscene_extensions: Kamera uzantılarıscene_tele: Telefoto lens değiştirmescene_video: Kare düşüşleri
2. nesil kamera düzeneği / sensör füzyonuna dayalı test sahneleri
feature_combination: Özellik kombinasyonlarıscene_flash: Otomatik flaş, minimum kare hızıscene_gen2_chart: 2. nesil kağıt grafik kullanılarak yapılan testlerscene_ip: Varsayılan kamera uygulaması ile Jetpack Kamera Uygulaması (JCA) arasında görüntü eşliğisensor_fusion: Kamera ve jiroskop zamanlama farkı
scene5: Lens gölgelendirmesi
Geniş renk gamı içeren tablet tabanlı test sahnesi
scene_wide_gamut: Geniş gamut renk profili ve aralığı
Her sahnenin açıklaması için ilgili bölüme bakın.
Tablet tabanlı test sahneleri
scene0
Testler için belirli bir sahne bilgisi gerekmez. Ancak jiroskop ve titreşim testi için telefonun sabit olması gerekir.
test_jitter
Kamera zaman damgalarındaki titremeyi ölçer.
Test edilen API'ler:
android.hardware.camera2.CaptureResult#SENSOR_TIMESTAMPandroid.hardware.camera2.CaptureRequest#CONTROL_AE_TARGET_FPS_RANGE
Geçti: Kareler arasında en az 30 ms fark vardır.
Aşağıdaki şekilde, küçük y ekseni aralığına dikkat edin. Bu grafikte titreşim aslında küçüktür.
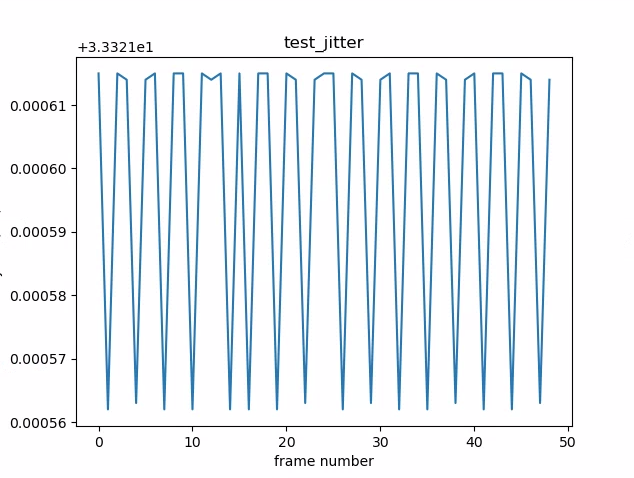
Şekil 1. test_jitter grafiği.
test_metadata
Meta veri girişlerinin geçerliliğini, çekim sonuçlarına ve kamera özellikleri nesnelerine bakarak test eder. Bu testte, görüntü içeriği önemli olmadığı için auto_capture_request pozlama ve kazanç değerleri kullanılır.
Test edilen API'ler:
android.hardware.camera2.CameraCharacteristics#INFO_SUPPORTED_HARDWARE_LEVELandroid.hardware.camera2.CameraCharacteristics#SCALER_CROPPING_TYPEandroid.hardware.camera2.CameraCharacteristics#SENSOR_BLACK_LEVEL_PATTERNandroid.hardware.camera2.CameraCharacteristics#SENSOR_INFO_TIMESTAMP_SOURCEandroid.hardware.camera2.CaptureRequest#SENSOR_FRAME_DURATIONandroid.hardware.camera2.CaptureResult#SENSOR_ROLLING_SHUTTER_SKEW
Geçti: Donanım düzeyi, rollingShutterSkew, frameDuration etiketleri,
timestampSource, croppingType, blackLevelPattern, pixel_pitch,
görüş alanı (FoV) ve hiperfokal mesafe mevcut ve geçerli değerlere sahip.
test_request_capture_match
Cihazın, yakalama meta verilerini geri okuyarak doğru pozlama ve kazanç değerlerini yazdığını test eder.
Test edilen API'ler:
android.hardware.camera2.CameraCharacteristics#SENSOR_INFO_EXPOSURE_TIME_RANGEandroid.hardware.camera2.CameraCharacteristics#SENSOR_INFO_SENSITIVITY_RANGEandroid.hardware.camera2.CaptureRequest#SENSOR_EXPOSURE_TIMEandroid.hardware.camera2.CaptureRequest#SENSOR_SENSITIVITYandroid.hardware.camera2.CaptureResult#SENSOR_EXPOSURE_TIMEandroid.hardware.camera2.CaptureResult#SENSOR_SENSITIVITY
Geçti: İstek ve yakalama meta veri değerleri tüm çekimlerde eşleşiyor.
test_sensor_events
Sensör füzyonu desteği reklamı yapan cihazlarda bu test, cihazın sensör etkinliklerini sorgulayıp yazdırdığını kontrol eder. Beklenen sensörler şunlardır: ivme ölçer, jiroskop ve manyetometre. Bu test yalnızca ekran açıkken (yani cihaz bekleme modunda değilken) çalışır.
Test edilen API'ler:
Geçti: Her sensörün etkinlikleri alınır.
test_solid_color_test_pattern
Kamera sessize alma için düz renkli test desenlerinin düzgün şekilde oluşturulduğunu test eder. Kameranın sesi kapatma özelliği destekleniyorsa düz renkli test desenleri desteklenmelidir. Kamera sessize alma desteklenmiyorsa düz renkli test desenleri yalnızca özellik tanıtılıyorsa test edilir.
Ham görüntüler destekleniyorsa renk atama da test edilir. Test edilen renkler siyah, beyaz, kırmızı, mavi ve yeşildir. Raw görüntüleri desteklemeyen kameralarda yalnızca siyah renk test edilir.
Test edilen API'ler:
android.hardware.camera2.CameraCharacteristics#SENSOR_AVAILABLE_TEST_PATTERN_MODESandroid.hardware.camera2.CaptureResult#SENSOR_TEST_PATTERN_DATAandroid.hardware.camera2.CaptureResult#SENSOR_TEST_PATTERN_MODE
Geçti: Desteklenen sabit test desenleri doğru renkte ve görüntüde düşük varyans var.
test_test_pattern
Her geçerli test deseni için kare yakalamak üzere android.sensor.testPatternMode parametresini test eder ve karelerin düz renkler ve renk çubukları için doğru şekilde oluşturulduğunu kontrol eder. Bu test aşağıdaki adımları içerir:
- Desteklenen tüm test desenleri için resimler yakalar.
- Düz renkli test deseni ve renk çubukları için doğruluk kontrolü yapar.
Test edilen API'ler:
android.hardware.camera2.CameraCharacteristics#SENSOR_AVAILABLE_TEST_PATTERN_MODESandroid.hardware.camera2.CaptureResult#SENSOR_TEST_PATTERN_MODE
Geçti: Desteklenen test desenleri doğru şekilde oluşturuluyor.
Şekil 2. test_test_patterns örneği.
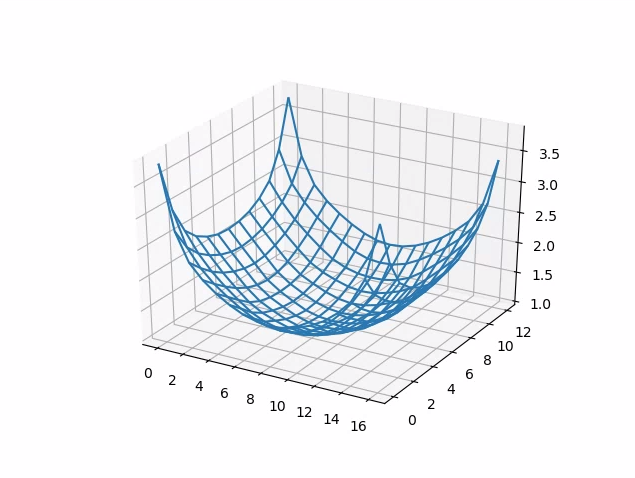
test_tonemap_curve
Test deseninin doğrusal ton eşleme ile hamdan YUV'ye dönüştürülmesini test eder. Bu test, ton eşleme dönüşümü için mükemmel bir görüntü deseni oluşturmak üzere android.sensor.testPatternMode = 2 (COLOR_BARS) gerektirir. İşlem hattının, doğrusal ton eşleme ve ideal görüntü girişiyle (test_test_patterns'ya bağlıdır) uygun renk çıkışlarına sahip olduğunu doğrular.
Test edilen API'ler:
android.hardware.camera2.CaptureRequest#DISTORTION_CORRECTION_MODEandroid.hardware.camera2.CaptureRequest#SENSOR_TEST_PATTERN_MODEandroid.hardware.camera2.CaptureRequest#TONEMAP_CURVEandroid.hardware.camera2.CaptureRequest#TONEMAP_MODE
Geçti: YUV ve RAW birbirine benziyor.
Şekil 3. test_tonemap_curve ham örneği.
Şekil 4. test_tonemap_curve YUV örneği.
test_unified_timestamp
Resim ve hareket sensörü etkinliklerinin aynı zaman alanında olup olmadığını test eder.
Test edilen API'ler:
android.hardware.camera2.CaptureResult#SENSOR_TIMESTAMPandroid.hardware.Sensorandroid.hardware.SensorEventandroid.hardware.Sensor#TYPE_ACCELEROMETERandroid.hardware.Sensor#TYPE_GYROSCOPE
Geçti: Hareket zaman damgaları, iki resim zaman damgası arasındadır.
test_vibration_restriction
Cihazın titreşiminin beklendiği gibi çalışıp çalışmadığını test eder.
Test edilen API'ler:
android.hardware.Sensorandroid.hardware.SensorEventandroid.hardware.Sensor#TYPE_ACCELEROMETERandroid.os.Vibratorandroid.hardware.camera2.CameraDevice#setCameraAudioRestriction
Geçti: Cihaz, kamera ses kısıtlama API'si tarafından kapatıldığında titremiyor.
scene1_1
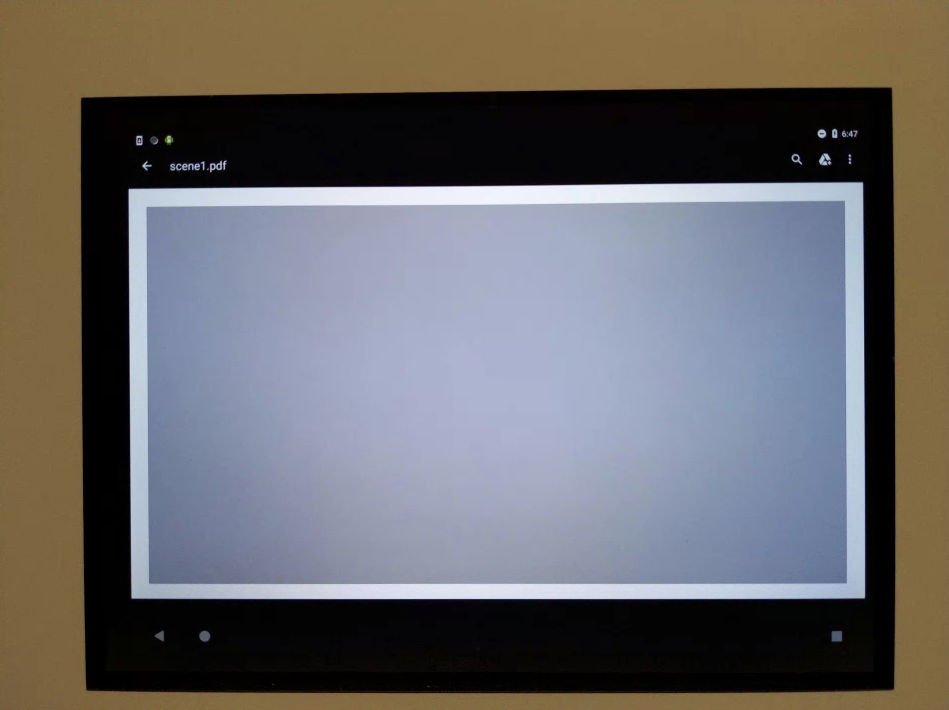
scene1 gri bir grafik. Gri grafik, kameranın görüş alanının ortadaki% 30'unu kaplamalıdır. Merkez bölgede özellik bulunmadığından gri grafiğin 3A'ya (AE, AWB ve AF) orta düzeyde zorluk çıkarması beklenir.
Ancak yakalama isteği, 3A'nın yakınlaşması için yeterli özellikler içeren tüm sahneyi belirtir.
RFoV kameralar, WFoV veya RFoV test düzeneğinde test edilebilir. WFoV test düzeneğinde bir RFoV kamerası test edilirse 3A'nın yakınlaşmasına yardımcı olmak için FoV'daki gri grafik için bazı sınırlar belirtmek üzere grafik 2/3 oranında ölçeklendirilir. Kamera test düzenekleri hakkında daha ayrıntılı açıklamalar için Camera ITS-in-a-box başlıklı makaleyi inceleyin.
Şekil 5. Tam boyutlu sahne1 grafiği (sol), 2/3 ölçekli grafik (sağ).
test_ae_precapture_trigger
Ön yakalama tetikleyicisi kullanılırken AE durum makinesini test eder. AE devre dışıyken beş manuel istek yakalar. Son istekte, AE devre dışı olduğundan yoksayılması gereken bir AE ön yakalama tetikleyicisi var.
Test edilen API'ler:
android.hardware.camera2.CaptureRequest#CONTROL_AE_MODEandroid.hardware.camera2.CaptureRequest#CONTROL_AE_PRECAPTURE_TRIGGERandroid.hardware.camera2.CaptureResult#CONTROL_AE_STATE
Geçiş: AE yakınsıyor.
test_auto_vs_manual
Otomatik ve manuel çekimlerin kaydedildiği testler aynı görünüyor.
Test edilen API'ler:
android.hardware.camera2.CaptureRequest#COLOR_CORRECTION_GAINSandroid.hardware.camera2.CaptureRequest#COLOR_CORRECTION_TRANSFORMandroid.hardware.camera2.CaptureResult#TONEMAP_CURVEandroid.hardware.camera2.CaptureResult#TONEMAP_MODE
Geçti: Her çekim sonucunda bildirilen manuel beyaz dengesi kazançları ve dönüşümleri, kameranın 3A algoritmasındaki otomatik beyaz dengesiyle estimate eşleşiyor.
Şekil 6. test_auto_vs_manual otomatik örnek.

Şekil 7. test_auto_vs_manual beyaz dengesi örneği.
Şekil 8. test_auto_vs_manual manuel beyaz dengesi dönüştürme örneği.
test_black_white
Cihazın tamamen siyah beyaz görüntüler oluşturup oluşturmadığını test eder. İki çekim yapar. İlk çekimde kazanç son derece düşük ve pozlama kısa olduğundan siyah bir fotoğraf elde edilir. İkinci çekimde ise kazanç son derece yüksek ve pozlama uzun olduğundan beyaz bir fotoğraf elde edilir.
Test edilen API'ler:
android.hardware.camera2.CaptureRequest#SENSOR_EXPOSURE_TIMEandroid.hardware.camera2.CaptureRequest#SENSOR_SENSITIVITY
Geçiş: Siyah beyaz görüntüler üretir. Beyaz resimlerin doygun kanalları, %1'ten daha az hata payıyla [255, 255, 255] RGB değerlerine sahiptir.
Şekil 9. test_black_white, siyah örnek.

Şekil 10. test_black_white, beyaz örnek.
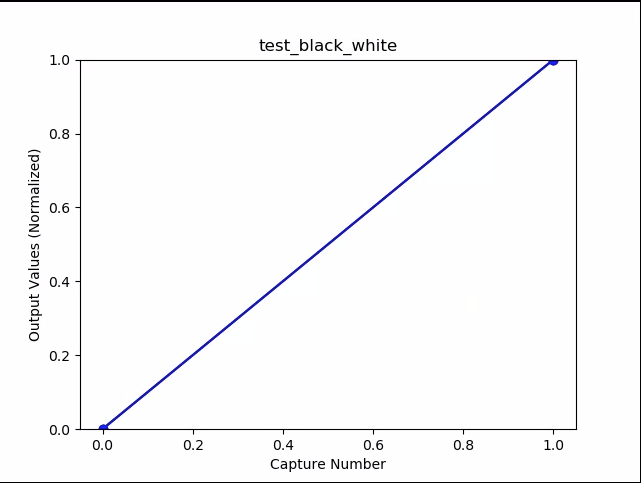
Şekil 11. test_black_white, plot means example.
test_burst_capture
Tüm yakalama hattının, tam boyutlu yakalama ve CPU süresinin hızına ayak uydurabildiğini doğrular.
Test edilen API'ler:
Geçti: Tam boyutlu görüntülerin patlamasını yakalar, kare düşmelerini ve görüntü parlaklığını kontrol eder.
test_burst_sameness_manual
Manuel çekim ayarıyla 50 görüntülük 5 patlama çekiyor ve tüm görüntülerin aynı olduğunu kontrol ediyor. Bu testi, aralıklı olarak farklı şekilde işlenen veya yapaylıklar içeren kareler olup olmadığını belirlemek için kullanın.
Test edilen API'ler:
android.hardware.camera2.CameraMetadata#REQUEST_AVAILABLE_CAPABILITIES_MANUAL_SENSORandroid.hardware.camera2.CameraMetadata#SYNC_MAX_LATENCY_PER_FRAME_CONTROL
Başarılı: Görüntüler görsel olarak ve RGB değerleri açısından aynıdır.
Başarısız: Her patlamanın başında RGB ortalama grafiğinde ani bir yükseliş veya düşüş gösteriliyor.
first_API_level< 30 için tolerans% 3'tür.first_API_level>= 30 için tolerans% 2'dir.

Şekil 12. test_burst_sameness_manual ortalama örneği.
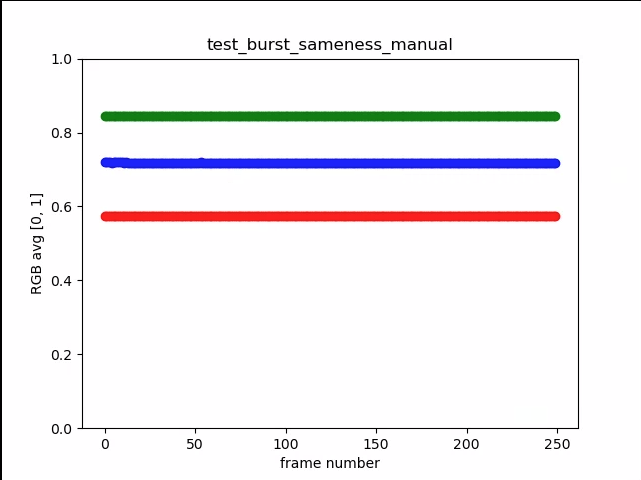
Şekil 13. test_burst_sameness_manual_plot_means
test_crop_region_raw
RAW akışlarının kırpılamadığını test eder.
Test edilen API'ler:
android.hardware.camera2.CameraCharacteristics#SENSOR_INFO_ACTIVE_ARRAY_SIZEandroid.hardware.camera2.CaptureResult#SCALER_CROP_REGIONandroid.hardware.camera2.CaptureRequest#SCALER_CROP_REGION
Geçti: YUV resimler ortadan kırpılır ancak RAW resimler kırpılmaz.

Şekil 14. test_crop_region_raw comp raw crop example.

Şekil 15. test_crop_region_raw comp raw full example.

Şekil 16. test_crop_region_raw comp YUV kırpma örneği.

Şekil 17. test_crop_region_raw YUV tam örneği.
test_crop_regions
Kırpma bölgelerinin çalıştığını test edin. Tam bir görüntü alır ve beş farklı bölgenin (köşeler ve merkez) yamalarını oluşturur. Beş bölge için kırpma ayarı yapılmış resimler çeker. Yama ve kırpma görüntüsü değerlerini karşılaştırır.
Test edilen API'ler:
android.hardware.camera2.CameraCharacteristics#SENSOR_INFO_ACTIVE_ARRAY_SIZEandroid.hardware.camera2.CaptureRequest#SCALER_CROP_REGION
Geçti: Kırpılan bölgenin resmi, kırpma resmine karşılık gelen yama ile eşleşiyor.
test_ev_compensation
Pozlama değeri (EV) telafisinin uygulanıp uygulanmadığını test eder. Test, temel bölüm ve ileri düzey bölümden oluşur.
Temel bölüm, EV telafisinin CONTROL_AE_COMPENSATION_STEP ile oluşturulan bir aralık kullanılarak uygulandığını test eder. Her telafi değerinde sekiz kare yakalanır.
Gelişmiş bölüm, sekiz adımda pozlamayı artırır ve ölçülen parlaklığı beklenen parlaklıkla karşılaştırır. Beklenen değerler, EV telafisi uygulanmamış görüntünün görüntü parlaklığı ve hesaplanan değerler gerçek görüntü değeri aralığını aşarsa beklenen değer doygun hale gelir. Beklenen değerler ile ölçülen değerler eşleşmezse veya görüntüler beş adım içinde aşırı pozlanırsa test başarısız olur.
Test edilen API'ler:
android.hardware.camera2.CameraCharacteristics#CONTROL_AE_COMPENSATION_STEPandroid.hardware.camera2.CaptureRequest#CONTROL_AE_EXPOSURE_COMPENSATIONandroid.hardware.camera2.CaptureRequest#CONTROL_AE_LOCKandroid.hardware.camera2.CaptureResult#CONTROL_AE_STATEandroid.hardware.camera2.CaptureRequest#CONTROL_AWB_LOCKandroid.hardware.camera2.CaptureResult#TONEMAP_CURVEandroid.hardware.camera2.CaptureResult#TONEMAP_MODE
Temel bölüm geçişi: Resimler, beş adımda aşırı pozlama olmadan artan pozlamayı gösterir.
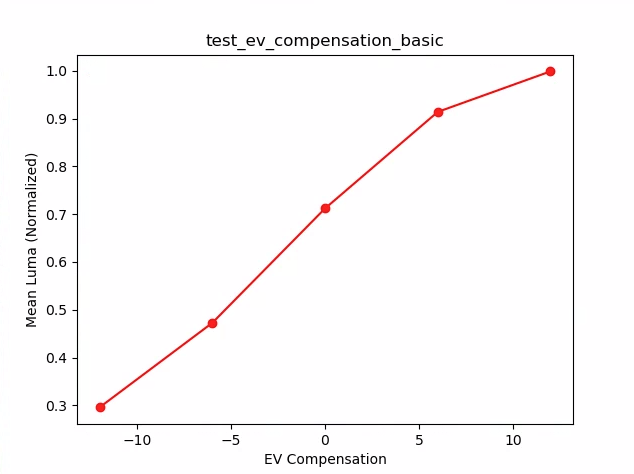
Şekil 18. test_ev_compensation_basic.
Gelişmiş bölüm geçişi: EV telafi ayarı arttıkça parlaklıkta artış yakalar. Her EV telafisi ayarı için çekilen sekiz karede sabit parlaklık değerleri vardır.
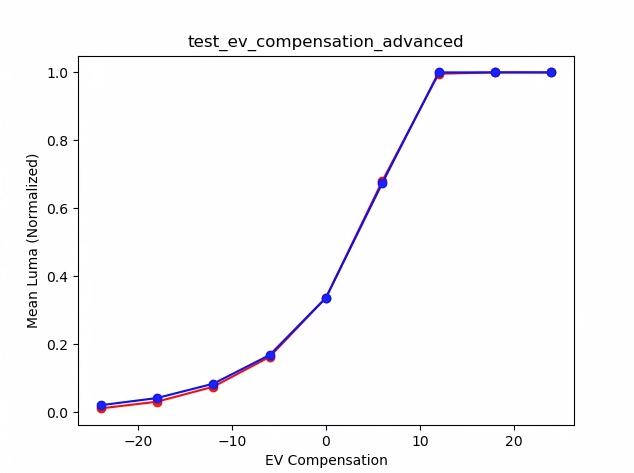
Şekil 19. test_ev_compensation_advanced_plot_means.
test_exposure_x_iso
ISO ve pozlama süresi değişirken sabit pozlama elde edildiği testler. ISO ve pozlama süresinin birbirini dengeleyecek şekilde seçildiği bir dizi çekim yapar.
Sonuçlar aynı parlaklığa sahip olmalıdır ancak dizideki görüntü daha fazla gürültü içermelidir. Örnek piksel ortalama değerlerinin birbirine yakın olduğunu doğrular. Görüntülerin 0 veya 1'e sabitlenmediğini (bu durumda düz çizgiler gibi görünürler) doğrular. Test, yapılandırma dosyanızda debug işaretini ayarlayarak RAW resimlerle de çalıştırılabilir.
Test edilen API'ler:
android.hardware.camera2.CaptureRequest#SENSOR_EXPOSURE_TIMEandroid.hardware.camera2.CaptureRequest#SENSOR_SENSITIVITY
Geçti: Görüntülerin parlaklığı aynıdır ancak ISO değeri yükseldikçe daha fazla gürültü oluşur. RGB düzlemleri, test edilen kazanç alanında ISO*exposure değeri sabit olduğunda düzdür.
Hata mekanizması: Aşağıdaki şekilde, kazanç çarpanı değerleri (x ekseni) arttıkça normalleştirilmiş RGB düzlemi ortalama değerleri (y ekseni) düşük kazanç çarpanı değerlerinden sapmaya başlar.
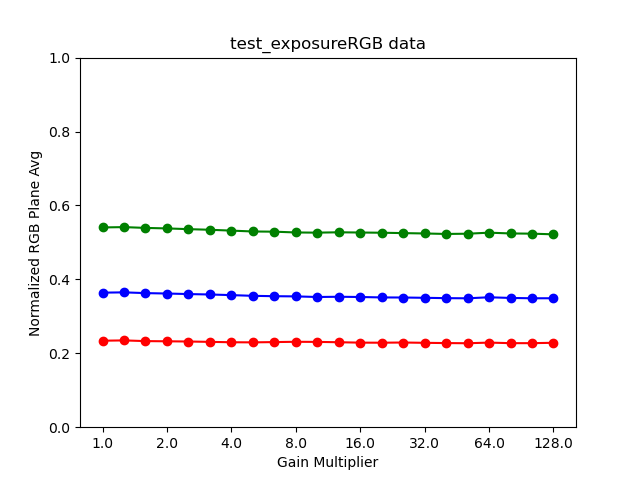
Şekil 20. test_exposure_plot_means.

Şekil 21. test_exposure_mult=1.00.

Şekil 22. test_exposure_mult=64.00.
test_latching
Ayarların (pozlama ve kazanç) FULL ve LEVEL_3 kameralar için doğru kareye kilitlendiğini test edin. Arka arkaya istekler kullanarak bir dizi çekim yapar ve çekimler arasında yakalama isteği parametrelerini değiştirir. Resimlerin beklenen özelliklere sahip olup olmadığını kontrol eder.
Test edilen API'ler:
Geçti: [2, 3, 6, 8, 10, 12, 13] numaralı resimlerin ISO'su veya pozlaması artırılmış ve aşağıdaki şekildeki grafikte daha yüksek RGB ortalamalarıyla gösterilmiştir.
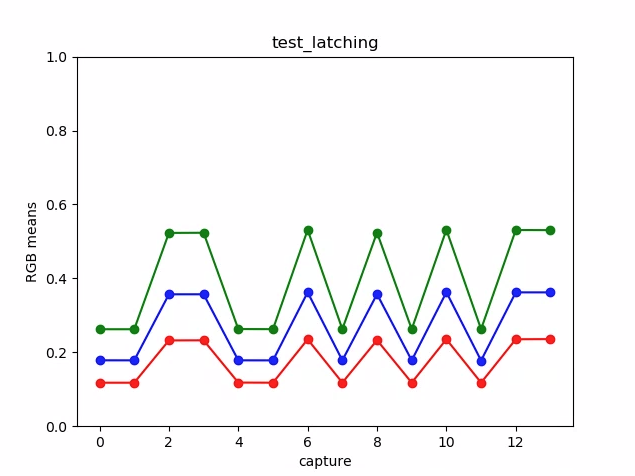
Şekil 23. test_latching grafiği, örnek anlamına gelir.

Şekil 24. test_latching i=00.

Şekil 25. test_latching i=01.

Şekil 26. test_latching i=02.

Şekil 27. test_latching i=03.
Şekil 28. test_latching i=04.

Şekil 29. test_latching i=05.

Şekil 30. test_latching i=06.

Şekil 31. test_latching i=07.

Şekil 32. test_latching i=08.

Şekil 33. test_latching i=09.

Şekil 34. test_latching i=10.

Şekil 35. test_latching i=11.

Şekil 36. test_latching i=12.
test_linearity
Cihazda işleme, doğrusal piksellere dönüştürülebilir. Cihaz, tek renkli bir hedefe doğrultulmuşken bir dizi çekim yapar.
Test edilen API'ler:
android.hardware.camera2.CameraCharacteristics#SENSOR_INFO_SENSITIVITY_RANGEandroid.hardware.camera2.CaptureRequest#BLACK_LEVEL_LOCKandroid.hardware.camera2.CaptureRequest#SENSOR_SENSITIVITYandroid.hardware.camera2.CaptureRequest#TONEMAP_CURVEandroid.hardware.camera2.CaptureRequest#TONEMAP_MODE
Geçti: R, G, B değerleri, hassasiyet arttıkça doğrusal olarak artmalıdır.
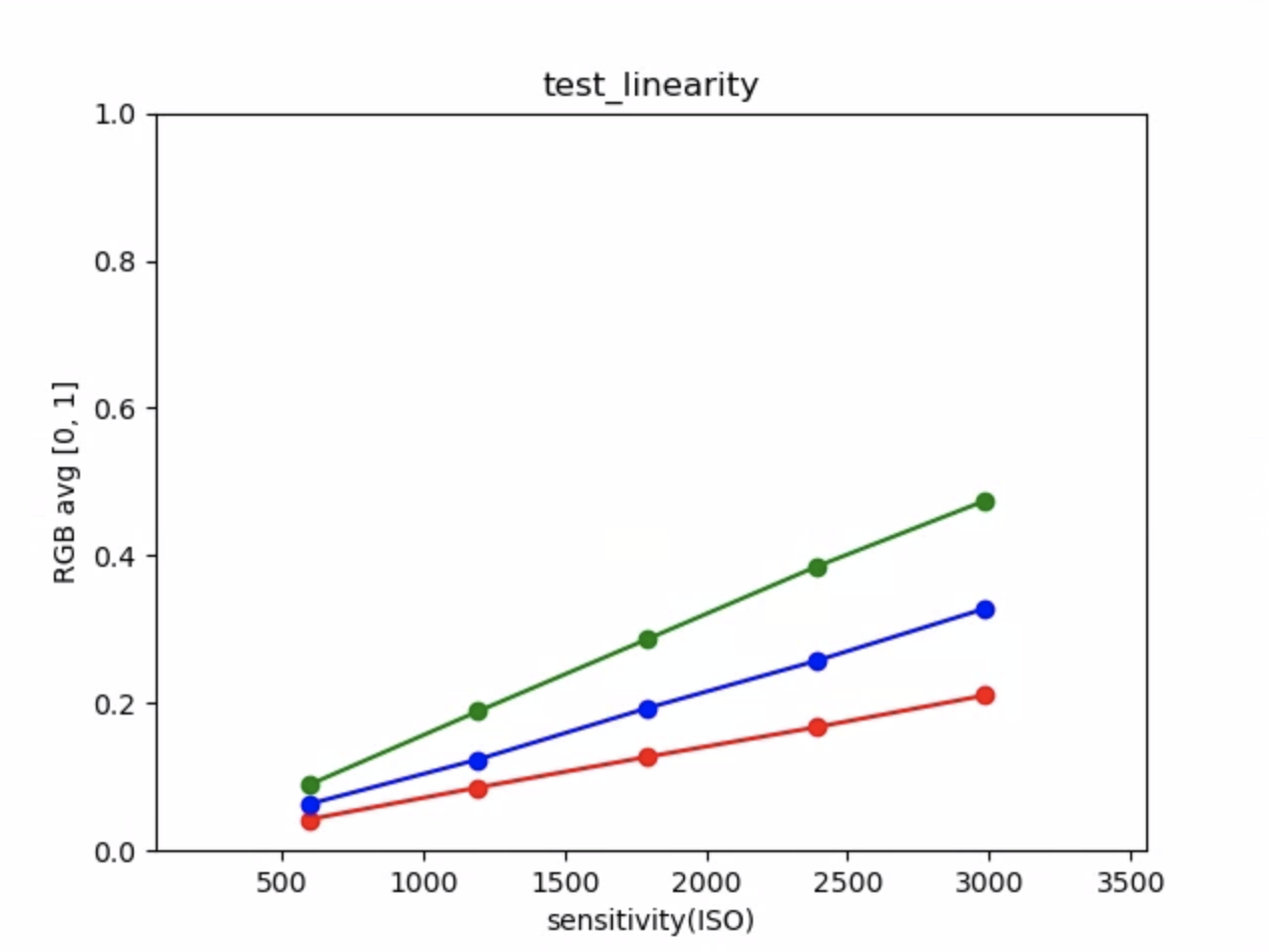
Şekil 37. test_linearity grafiği, ortalama örneği.
test_locked_burst
3A kilidini ve YUV patlamasını (otomatik ayarı kullanarak) test eder. Bu test, MANUAL_SENSOR veya PER_FRAME_CONTROLS bulunmayan sınırlı cihazlarda bile geçecek şekilde tasarlanmıştır.
Test, kare hızı kontrolü CTS'de yapılırken YUV görüntü tutarlılığını kontrol eder.
Test edilen API'ler:
android.hardware.camera2.CaptureRequest#CONTROL_AE_LOCKandroid.hardware.camera2.CaptureRequest#CONTROL_AWB_LOCK
Geçti: Yakalamalar tutarlı görünüyor.
Şekil 38. test_locked_burst frame0 örneği.
Şekil 39. test_locked_burst frame1 örneği.
Şekil 40. test_locked_burst frame2 örneği.
scene1_2
scene 1_2, scene 1_1 ile işlevsel olarak aynıdır ve scene 1'nin uzun süresini azaltmak için alt sahne yapısını kullanır.
test_param_color_correction
android.colorCorrection.* parametrelerinin ayarlandığında uygulandığını test eder.
Farklı dönüştürme ve kazanç değerleriyle çekimler yapar ve bunların buna uygun şekilde farklı göründüğünü test eder. Dönüşüm ve kazançlar, çıkışı giderek daha kırmızı veya mavi hale getirmek için seçilir. Doğrusal ton eşleme kullanır.
Ton eşleme, yüksek dinamik aralıklı görüntülerin görünümünü daha sınırlı bir dinamik aralığa sahip bir ortamda yaklaştırmak için görüntü işlemede kullanılan bir tekniktir. Bu teknikte, bir renk grubu başka bir renkle eşlenir.
Test edilen API'ler:
android.hardware.camera2.CaptureRequest#COLOR_CORRECTION_GAINSandroid.hardware.camera2.CaptureRequest#COLOR_CORRECTION_MODEandroid.hardware.camera2.CaptureRequest#COLOR_CORRECTION_TRANSFORM
Geçti: Dönüşüme göre R ve B değerleri artırılır.
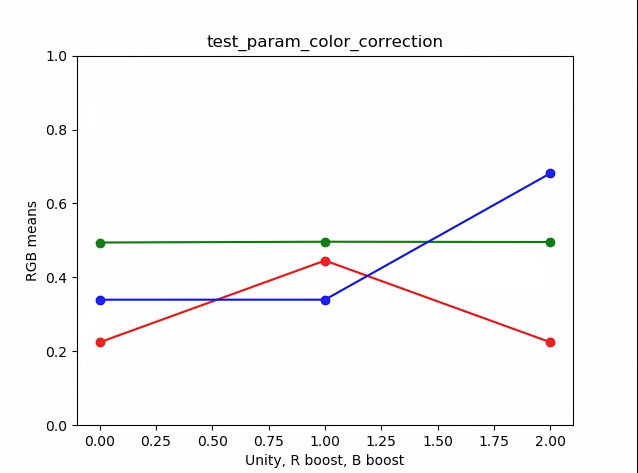
Şekil 41. test_param_color_correction grafiği, örnek anlamına gelir.
Aşağıdaki şekillerde x ekseni yakalama istekleridir: 0 = birleştirme, 1 = kırmızı artırma ve 2 = mavi artırma.
Şekil 42. test_param_color_correction req=0 birim örneği.
Şekil 43. test_param_color_correctness req=1 kırmızı artırma örneği.
Şekil 44. test_param_color_correction req=2 mavi artırma örneği.
test_param_flash_mode
android.flash.mode parametresinin uygulanıp uygulanmadığını test eder. Pozlamayı, flaşın patlayıp patlamadığını anlamak kolay olsun diye manuel olarak koyu tarafa ayarlar ve doğrusal bir ton eşleme kullanır. Flaşın ateşlenip ateşlenmediğini doğrulamak için oluşturulmuş büyük bir gradyan olup olmadığını görmek üzere merkezi, karo resmiyle kontrol eder.
Test edilen API'ler:
Geçti: Döşeme resminin ortasında büyük bir gradyan var. Bu, flaşın kullanıldığı anlamına gelir.
Şekil 45. test_param_flash_mode 1 örneği.

Şekil 46. test_param_flash_mode bir kutucuk örneği.
Şekil 47. test_param_flash_mode 2 örneği.

Şekil 48. test_param_flash_mode iki kutulu örneği.
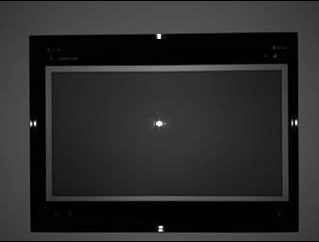
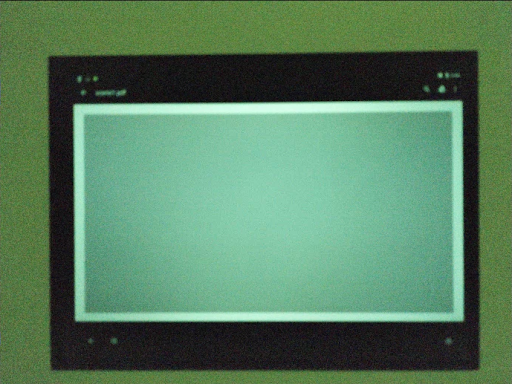
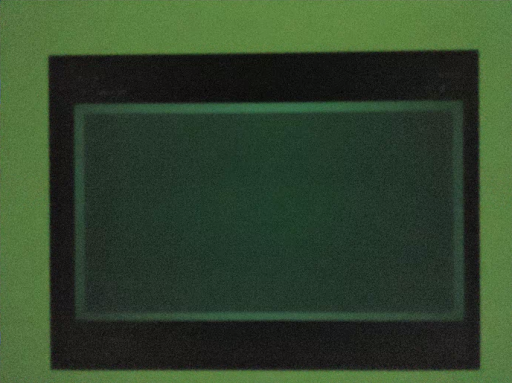
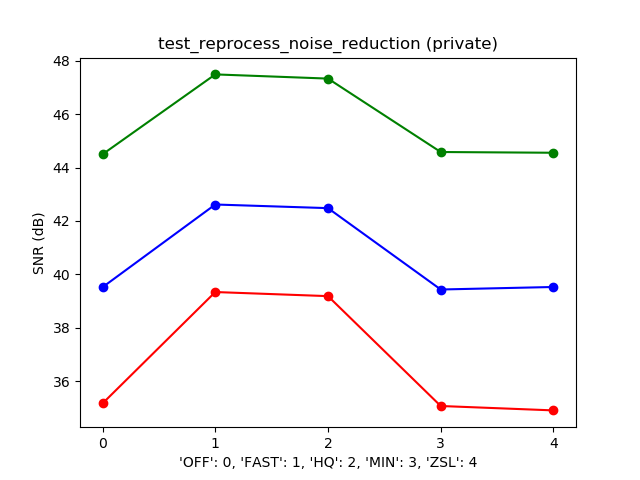
test_param_noise_reduction
android.noiseReduction.mode parametresinin ayarlandığında doğru şekilde uygulanıp uygulanmadığını test eder. Kamerayla loş ışıkta görüntü yakalama Çekilen görüntünün gürültülü olmasını sağlamak için yüksek analog kazanç kullanır. NR kapalı, hızlı ve yüksek kaliteli olmak üzere üç görüntü yakalar. Ayrıca, düşük kazanç ve NR kapalıyken bir görüntü yakalar ve bunun varyansını temel değer olarak kullanır. Sinyal-gürültü oranı (SNR) ne kadar yüksek olursa görüntü kalitesi de o kadar iyi olur.
Test edilen API'ler:
Geçiş: SNR, farklı gürültü azaltma modlarına göre değişir ve aşağıdaki grafiğe benzer şekilde davranır:
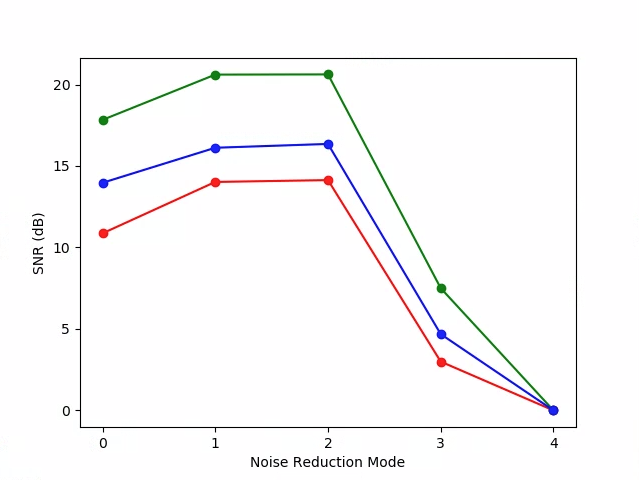
Şekil 49. test_param_noise_reduction grafiği, SNR örneklerini gösterir.
0: KAPALI, 1: HIZLI, 2: YÜKSEK KALİTE, 3: MİNİMUM , 4: ZSL
Şekil 50. test_param_noise_reduction yüksek kazançlı nr=0 örneği.
Şekil 51. test_param_noise_reduction yüksek kazançlı nr=1 örneği.
Şekil 52. test_param_noise_reduction yüksek kazançlı nr=2 örneği.
Şekil 53. test_param_noise_reduction yüksek kazançlı nr=3 örneği.

Şekil 54. test_param_noise_reduction düşük kazanç örneği.
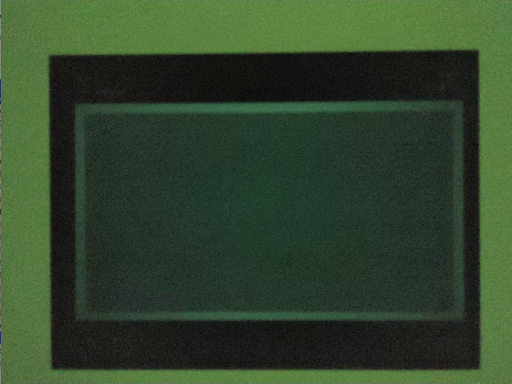
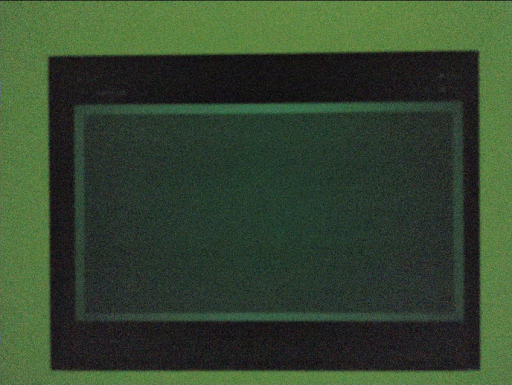
test_param_shading_mode
android.shading.mode parametresinin uygulanıp uygulanmadığını test eder.
Test edilen API'ler:
android.hardware.camera2.CaptureRequest#SHADING_MODEandroid.hardware.camera2.CaptureRequest#STATISTICS_LENS_SHADING_MAP_MODEandroid.hardware.camera2.CaptureResult#STATISTICS_LENS_SHADING_CORRECTION_MAP
Geçti: Gölgeleme modları değiştirildi ve lens gölgeleme haritaları beklendiği gibi değiştirildi.
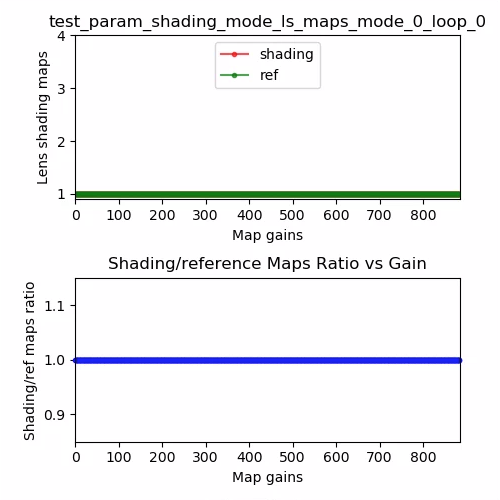
Şekil 55. test_param_shading_mode lens gölgelendirme haritası, mod 0 döngü 0 örneği.
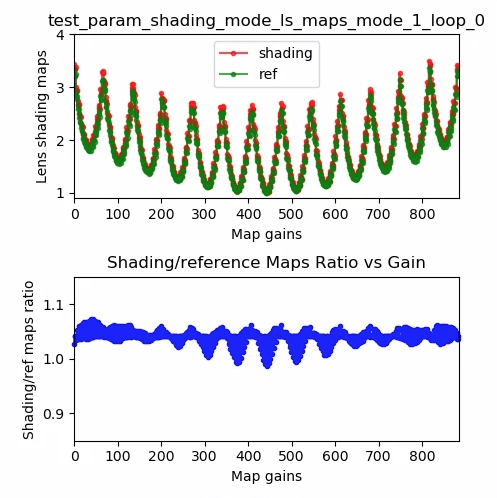
Şekil 56. test_param_shading_mode lens gölgelendirme haritası, mod 1 döngü 0 örneği.
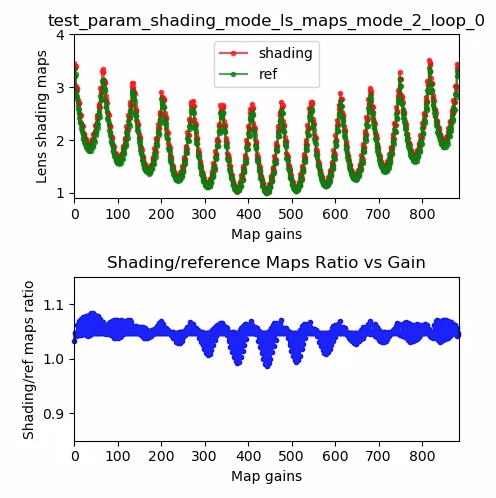
Şekil 57. test_param_shading_mode lens gölgelendirme haritası, mod 2 döngü 0 örneği.
test_param_tonemap_mode
android.tonemap.mode parametresinin uygulanıp uygulanmadığını test eder. Her R, G, B kanalına farklı ton eşleme eğrileri uygular ve çıkış resimlerinin beklendiği gibi değiştirildiğini kontrol eder. Bu test, test1 ve test2 olmak üzere iki testten oluşur.
Test edilen API'ler:
android.hardware.camera2.CameraMetadata#TONEMAP_MODE_CONTRAST_CURVEandroid.hardware.camera2.CameraMetadata#TONEMAP_MODE_FASTandroid.hardware.camera2.CaptureRequest#TONEMAP_CURVEandroid.hardware.camera2.CaptureRequest#TONEMAP_MODE
Pass:
test1: Her iki görüntüde de doğrusal ton eşleme var ancakn=1daha dik bir renk geçişine sahip.n=1resminde G (yeşil) kanalı daha parlak.test2: Aynı ton eşleme, ancak farklı uzunluk. Resimler aynı.

n=0 ile Şekil 58. test_param_tonemap_mode.

Şekil 59. n=1 ile test_param_tonemap_mode.
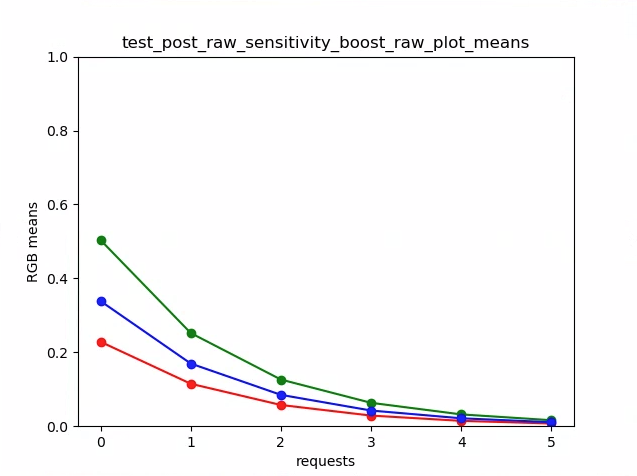
test_post_raw_sensitivity_boost
Gönderi ham hassasiyet artışını kontrol eder. Farklı hassasiyetlere sahip bir dizi RAW ve YUV görüntüyü yakalar, RAW hassasiyet artışı kombinasyonunu yayınlar ve çıkış piksel ortalamasının istek ayarlarıyla eşleşip eşleşmediğini kontrol eder.
Test edilen API'ler:
android.hardware.camera2.CameraCharacteristics#CONTROL_POST_RAW_SENSITIVITY_BOOST_RANGEandroid.hardware.camera2.CameraMetadata#REQUEST_AVAILABLE_CAPABILITIES_RAWandroid.hardware.camera2.CaptureRequest#CONTROL_POST_RAW_SENSITIVITY_BOOSTandroid.hardware.camera2.CaptureRequest#SENSOR_SENSITIVITY
Geçti: Yükseltme arttıkça RAW görüntüler kararırken YUV görüntülerin parlaklığı sabit kalıyor.
Şekil 60. test_post_raw_sensitivity_boost raw s=3583 boost=0100 örneği.
Şekil 61. test_post_raw_sensitivity_boost raw s=1792 boost=0200 örneği.
Şekil 62. test_post_raw_sensitivity_boost raw s=0896 boost=0400 örneği.

Şekil 63. test_post_raw_sensitivity_boost raw s=0448 boost=0800 örneği.

Şekil 64. test_post_raw_sensitivity_boost raw s=0224 boost=1600 örneği.
Şekil 65. test_post_raw_sensitivity_boost raw s=0112 boost=3199 örneği.
Şekil 66. test_post_raw_sensitivity_boost ham grafik ortalaması örneği.

Şekil 67. test_post_raw_sensitivity_boost YUV s=0112 boost=3199 örneği.
Şekil 68. test_post_raw_sensitivity_boost YUV s=0448 boost=0800 example.
Şekil 69. test_post_raw_sensitivity_boost YUV s=0896 boost=0400 örneği.
Şekil 70. test_post_raw_sensitivity_boost YUV s=1792 boost=0200 örneği.

Şekil 71. test_post_raw_sensitivity_boost YUV s=3585 boost=0100 örneği.
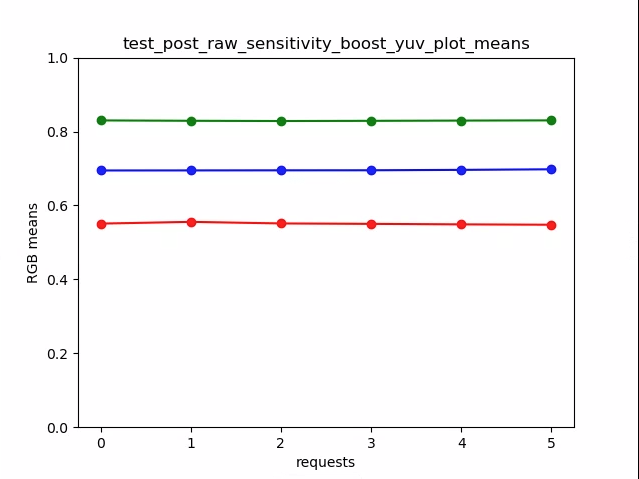
Şekil 72. test_post_raw_sensitivity_boost_yuv_plot_means
test_raw_exposure
Pozlama süresi artan bir dizi ham görüntü yakalar ve piksel değerlerini ölçer.
Test edilen API'ler:
android.hardware.camera2.CameraMetadata#REQUEST_AVAILABLE_CAPABILITIES_RAWandroid.hardware.camera2.CaptureRequest#SENSOR_EXPOSURE_TIME
Geçti: ISO'yu (kazanç) artırmak pikselleri ışığa karşı daha hassas hale getirir. Bu nedenle, grafik sola doğru hareket eder.
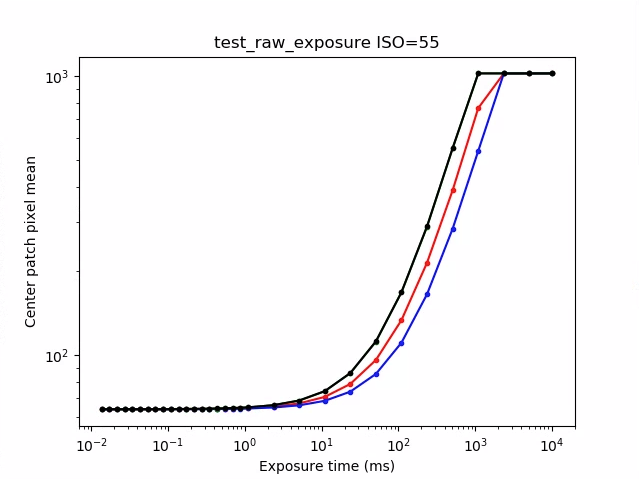
Şekil 73. test_raw_exposure ISO=55 örneği.
10⁰ 1 ms, 10¹ 10 ms ve 10⁻¹ 0, 1 ms'dir.
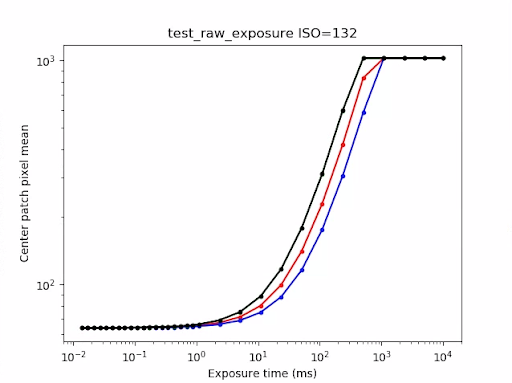
Şekil 74. test_raw_exposure ISO=132 örneği.
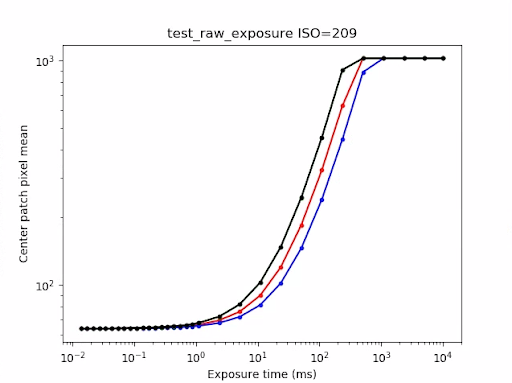
Şekil 75. test_raw_exposure ISO=209 örneği.
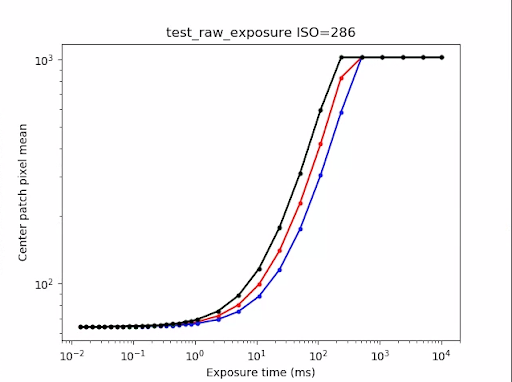
Şekil 76. test_raw_exposure ISOs=286 örneği.
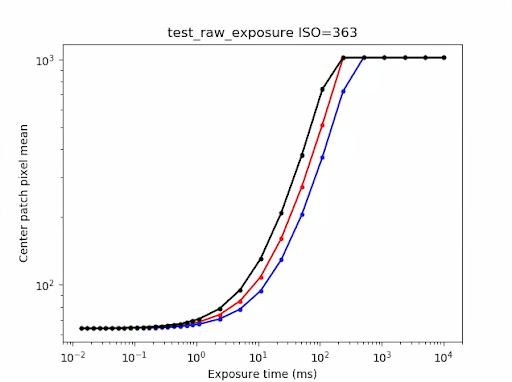
Şekil 77. test_raw_exposure ISO=363 örneği.
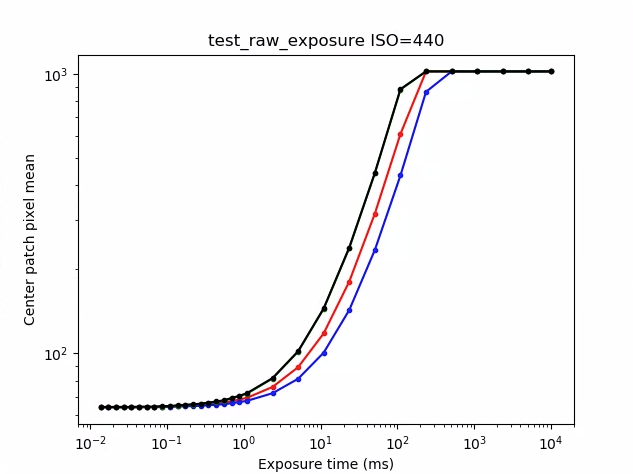
Şekil 78. test_raw_exposure ISO=440 örneği.
test_reprocess_noise_reduction
Yeniden işleme istekleri için android.noiseReduction.mode uygulanan testler.
Kameranın ışığı azken yeniden işlenmiş görüntüleri yakalar. Çekilen görüntünün gürültülü olduğunu doğrulamak için yüksek analog kazanç kullanır. NR kapalı, hızlı ve yüksek kalite için üç yeniden işlenmiş görüntü yakalar. Düşük kazançlı ve NR kapalı olarak yeniden işlenmiş bir görüntü yakalar ve bunun varyansını referans değeri olarak kullanır.
Test edilen API'ler:
Geçerli: FAST >= OFF, HQ >= FAST ve HQ >> OFF.
Şekil 79. Tipik SNR ve NR modu grafiği örneği.
test_tonemap_sequence
Farklı ton eşleme eğrileriyle çekim dizisini test eder. Doğrusal ton eşleme ile 3 manuel çekim yapar. Varsayılan ton eşleme ile 3 manuel çekim yapar. Birbirini izleyen her kare çifti arasındaki farkı hesaplar.
Test edilen API'ler:
Geçti: Üç özdeş kare ve ardından farklı bir üç özdeş kare grubu var.
Şekil 80. test_tonemap_sequence i=0 örneği.
Şekil 81. test_tonemap_sequence i=1 örneği.
Şekil 82. test_tonemap_sequence i=2 örneği.

Şekil 83. test_tonemap_sequence i=3 örneği.

Şekil 84. test_tonemap_sequence i=4 örneği.

Şekil 85. test_tonemap_sequence i=5 örneği.
test_yuv_jpeg_all
Görüntü yakalama için bildirilen tüm boyut ve biçimlerin çalıştığı testler. image_processing_utils modülü tarafından dönüştürüldüğünde YUV ve JPEG'nin aynı görünmesi için doğrusal ton eşleme ile manuel istek kullanır. Resimler varsayılan olarak kaydedilmez ancak debug_mode seçeneği etkinleştirilerek kaydedilebilir.
Test edilen API'ler:
android.hardware.camera2.CaptureRequest#TONEMAP_CURVEandroid.hardware.camera2.CaptureRequest#TONEMAP_MODEandroid.graphics.ImageFormat#JPEG
Geçti: Tüm görüntü merkezleri, en yüksek çözünürlüklü YUV görüntünün% 3'ü ile RGB'ye dönüştürülmüş görüntülerde en fazla ortalama karesel hata (RMS) (bir sinyalin değeri) farkına sahiptir.
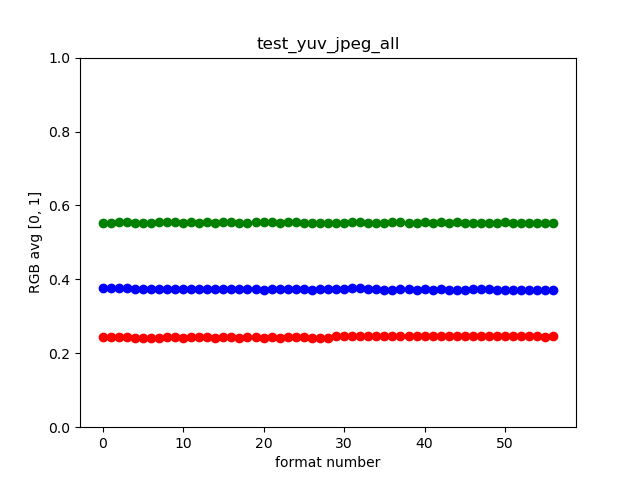
Şekil 86. test_yuv_jpeg_all örneği.
test_yuv_plus_dng
Resim yakalama için bildirilen boyutların ve biçimlerin çalıştığını test eder.
Test edilen API'ler:
Geçti: Test tamamlanır ve istenen resimler döndürülür.

Şekil 87. test_yuv_plus_dng örneği.
scene1_3
scene 1_3, scene 1_1 ile işlevsel olarak aynıdır ve scene 1'nin uzun süresini azaltmak için alt sahne yapısını kullanır.
test_capture_result
Geçerli verilerin CaptureResult nesnelerinde döndüğünü test edin. Test; otomatik çekim, manuel çekim ve ikinci bir otomatik çekimden oluşur.
Test edilen API'ler:
android.hardware.camera2.CaptureRequest#CONTROL_AE_MODEandroid.hardware.camera2.CaptureRequest#CONTROL_AE_REGIONSandroid.hardware.camera2.CaptureRequest#CONTROL_AF_MODEandroid.hardware.camera2.CaptureRequest#CONTROL_AF_REGIONSandroid.hardware.camera2.CaptureRequest#CONTROL_AWB_MODEandroid.hardware.camera2.CaptureRequest#CONTROL_AWB_REGIONSandroid.hardware.camera2.CaptureRequest#CONTROL_MODEandroid.hardware.camera2.CaptureRequest#COLOR_CORRECTION_GAINSandroid.hardware.camera2.CaptureRequest#COLOR_CORRECTION_TRANSFORMandroid.hardware.camera2.CaptureRequest#COLOR_CORRECTION_MODEandroid.hardware.camera2.CaptureRequest#SENSOR_EXPOSURE_TIMEandroid.hardware.camera2.CaptureRequest#SENSOR_SENSITIVITYandroid.hardware.camera2.CaptureResult#STATISTICS_LENS_SHADING_CORRECTION_MAPandroid.hardware.camera2.CaptureRequest#STATISTICS_LENS_SHADING_MAP_MODEandroid.hardware.camera2.CaptureRequest#TONEMAP_CURVEandroid.hardware.camera2.CaptureRequest#TONEMAP_MODE
Geçti: Meta veriler tüm çekimler için geçerlidir ve manuel ayarlar ikinci otomatik çekime sızmaz. Çekimler için lens gölgelendirme düzeltmesini planlar.
Şekil 88. test_capture_result_plot_lsc_auto_ch0.
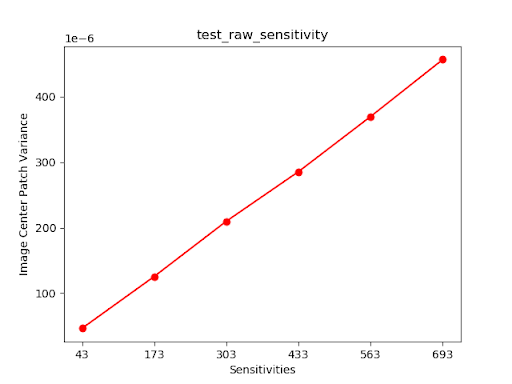
test_dng_noise_model
DNG ham model parametrelerinin doğru olduğunu doğrular. Grafikte, çeşitli hassasiyetlerde çekilen ham fotoğraflardaki gri kartın merkez yamasının ölçülen varyansı gösterilir ve bu değerler, kamera HAL'sindeki DNG gürültü modeli tarafından her hassasiyette beklenen varyansla (yakalama sonucu nesnelerinde döndürülen O,S parametrelerine göre) karşılaştırılır. DNG gürültü modeli hakkında daha ayrıntılı bilgi için DNG Gürültü Modeli ile ilgili aşağıdaki belgeyi indirin.
Test edilen API'ler:
android.hardware.camera2.CameraCharacteristics#SENSOR_INFO_SENSITIVITY_RANGEandroid.hardware.camera2.CameraCharacteristics#SENSOR_INFO_WHITE_LEVELandroid.hardware.camera2.CameraCharacteristics#SENSOR_MAX_ANALOG_SENSITIVITYandroid.hardware.camera2.CaptureResult#SENSOR_NOISE_PROFILEandroid.hardware.camera2.CaptureRequest#SENSOR_SENSITIVITY
Geçti: DNG ham model parametreleri doğru. Beklenen RGB değerleri, ölçülen gerçek RGB değerleriyle eşleşir.
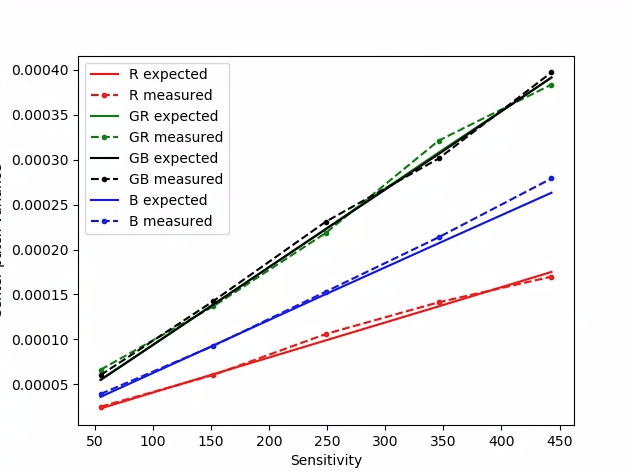
Şekil 89. test_dng_noise_model_plog.
test_jpeg
YUV görüntülerini ve cihaz JPEG görüntülerini dönüştüren testler aynı görünüyor. Test, görüntünün ortasındaki% 10'luk kısmı alır, RGB değerini hesaplar ve bu değerlerin eşleştiğini doğrular.
Test edilen API'ler:
Geçti: Her resim arasındaki ortalama RGB farkı %3'ten azdır.

Şekil 90. test_jpeg_fmt=jpg.jpg.

Şekil 91. test_jpeg=fmt=yuv.jpg.
test_raw_burst_sensitivity
Artan kazançlarla bir dizi ham görüntü yakalar ve gürültüyü ölçer. Yalnızca ham görüntüleri seri çekim olarak kaydeder.
Test edilen API'ler:
android.hardware.camera2.CameraCharacteristics#SENSOR_INFO_ACTIVE_ARRAY_SIZEandroid.hardware.camera2.CameraCharacteristics#SENSOR_INFO_SENSITIVITY_RANGEandroid.hardware.camera2.CameraCharacteristics#SENSOR_INFO_WHITE_LEVELandroid.hardware.camera2.CameraCharacteristics#SENSOR_MAX_ANALOG_SENSITIVITYandroid.hardware.camera2.CameraMetadata#REQUEST_AVAILABLE_CAPABILITIES_RAW
Geçti: Kazanç arttığı için her çekim, bir öncekinden daha gürültülü.
Merkez istatistikleri ızgara hücresinin varyansını kullanır.
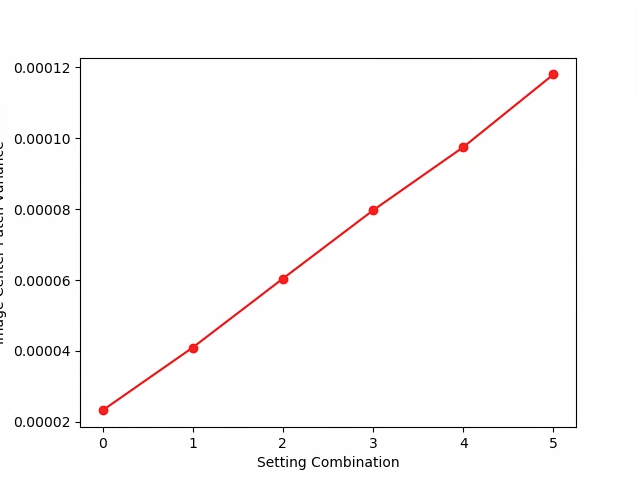
Şekil 92. test_raw_burst_sensitivity_variance.
test_raw_sensitivity
Artan hassasiyetlerle bir dizi ham görüntü yakalar ve görüntünün ortasındaki% 10'luk bölümdeki gürültüyü (varyans) ölçer. Her çekimin bir öncekinden daha gürültülü olduğunu test eder.
Test edilen API'ler:
android.hardware.camera2.CameraCharacteristics#SENSOR_INFO_PRE_CORRECTION_ACTIVE_ARRAY_SIZEandroid.hardware.camera2.CameraCharacteristics#SENSOR_INFO_SENSITIVITY_RANGEandroid.hardware.camera2.CameraCharacteristics#SENSOR_INFO_WHITE_LEVELandroid.hardware.camera2.CameraCharacteristics#SENSOR_MAX_ANALOG_SENSITIVITYandroid.hardware.camera2.CameraMetadata#REQUEST_AVAILABLE_CAPABILITIES_RAW
Geçiş: Varyans her çekimde artar.
Şekil 93. test_raw_sensitivity_variance.
test_yuv_plus_jpeg
Tek bir kareyi hem YUV hem de JPEG çıkışı olarak yakalamayı test eder. image_processing_utils modülü tarafından dönüştürüldüğünde YUV ve JPEG'nin aynı görünmesi için doğrusal ton eşleme ile manuel istek kullanır.
Test edilen API'ler:
android.hardware.camera2.CaptureRequest#TONEMAP_CURVEandroid.hardware.camera2.CaptureRequest#TONEMAP_MODEandroid.graphics.ImageFormat#JPEG
Geçti: YUV ve JPEG resimleri benzerdir ve RMS (bir sinyalin değeri) farkı% 1'den azdır.

Şekil 94. JPEG biçiminde test_yuv_plus_jpeg.

YUV biçiminde Şekil 95. test_yuv_plus_jpeg.
test_yuv_plus_raw
Destekleniyorsa tek bir kareyi hem ham (10 bit ve 12 bit ham) hem de YUV çıkışları olarak yakalamayı test eder. Doğrusal ton eşleme ile manuel istek kullanıldığından ham ve YUV değerlerinin aynı olması beklenir. RGB'ye dönüştürülmüş görüntülerin merkezdeki% 10'luk RGB değerlerini karşılaştırır. Günlüklerandroid.shading.mode.
Test edilen API'ler:
android.hardware.camera2.CameraMetadata#REQUEST_AVAILABLE_CAPABILITIES_RAWandroid.hardware.camera2.CaptureResult#STATISTICS_LENS_SHADING_CORRECTION_MAPandroid.hardware.camera2.CaptureRequest#COLOR_CORRECTION_MODEandroid.hardware.camera2.CaptureRequest#COLOR_CORRECTION_GAINSandroid.hardware.camera2.CaptureRequest#COLOR_CORRECTION_TRANSFORMandroid.hardware.camera2.CaptureRequest#CONTROL_AWB_MODEandroid.hardware.camera2.CaptureRequest#CONTROL_MODEandroid.hardware.camera2.CaptureRequest#SHADING_MODEandroid.hardware.camera2.CaptureRequest#TONEMAP_CURVEandroid.hardware.camera2.CaptureRequest#TONEMAP_MODEandroid.graphics.ImageFormat#RAW10android.graphics.ImageFormat#RAW12
Geçti: YUV ve ham görüntüler benzerdir ve% 3,5'ten daha az RMS (bir sinyalin karesi alınmış ortalama değeri) farkı vardır.

Şekil 96. test_yuv_plus_raw_shading=1_raw.jpg.
Şekil 97. test_yuv_plus_raw_shading=1_yuv.jpg.
test_sensitivity_priority
Daha yüksek ISO ile artan gürültü seviyeleri arasında bir korelasyon olduğunu doğrulamak için çeşitli ISO ayarlarında CONTROL_AE_PRIORITY_MODE_SENSOR_SENSITIVITY_PRIORITY testleri yapın.
Test edilen API'ler:
android.hardware.camera2.CameraMetadata#CONTROL_AE_PRIORITY_MODE_SENSOR_SENSITIVITY_PRIORITYandroid.hardware.camera2.CaptureRequest#SENSOR_SENSITIVITYandroid.hardware.camera2.CaptureResult#SENSOR_SENSITIVITYandroid.hardware.camera2.CaptureRequest#CONTROL_AE_PRIORITY_MODEandroid.hardware.camera2.CaptureResult#CONTROL_AE_PRIORITY_MODEandroid.hardware.camera2.CameraCharacteristics#SENSOR_INFO_SENSITIVITY_RANGEandroid.hardware.camera2.CaptureRequest#CONTROL_AE_MODEandroid.hardware.camera2.CaptureResult#CONTROL_AE_MODEandroid.hardware.camera2.CameraMetadata#CONTROL_AE_MODE_ONandroid.hardware.camera2.CameraCharacteristics#CONTROL_AE_AVAILABLE_PRIORITY_MODES
Geçti: Daha yüksek ISO, gürültü seviyelerinin artmasına neden olur.
Test atlama ölçütleri
Aşağıdaki ölçütlerden herhangi biri karşılanırsa test_sensitivity_priority.py testi atlanır:
- Cihazın ilk API düzeyi (
first_api_level) 35 veya daha düşüktür. - Cihaz,
CONTROL_AE_AVAILABLE_PRIORITY_MODESiçindeCONTROL_AE_PRIORITY_MODE_SENSOR_SENSITIVITY_PRIORITYreklamı yayınlamıyor.
test_exposure_time_priority
ISO'nun telafi edebileceği aralıkta sabit parlaklık olup olmadığını kontrol ederek CONTROL_AE_PRIORITY_MODE_SENSOR_EXPOSURE_TIME_PRIORITY farklı pozlama sürelerinde testler yapın.
Test edilen API'ler:
android.hardware.camera2.CameraMetadata#CONTROL_AE_PRIORITY_MODE_SENSOR_EXPOSURE_TIME_PRIORITYandroid.hardware.camera2.CaptureRequest#SENSOR_EXPOSURE_TIMEandroid.hardware.camera2.CaptureResult#SENSOR_EXPOSURE_TIMEandroid.hardware.camera2.CaptureRequest#CONTROL_AE_PRIORITY_MODEandroid.hardware.camera2.CaptureResult#CONTROL_AE_PRIORITY_MODEandroid.hardware.camera2.CameraCharacteristics#SENSOR_INFO_SENSITIVITY_RANGEandroid.hardware.camera2.CaptureResult#SENSOR_SENSITIVITYandroid.hardware.camera2.CaptureRequest#CONTROL_AE_MODEandroid.hardware.camera2.CaptureResult#CONTROL_AE_MODEandroid.hardware.camera2.CameraMetadata#CONTROL_AE_MODE_ONandroid.hardware.camera2.CameraCharacteristics#CONTROL_AE_AVAILABLE_PRIORITY_MODES
Başarılı: ISO telafi aralığındaysa parlaklık, pozlama süreleri boyunca sabittir (tolerans dahilinde).
Test atlama ölçütleri
Aşağıdaki ölçütlerden herhangi biri karşılanırsa test_exposure_time_priority testi atlanır:
- Cihazın ilk API düzeyi (
first_api_level) 35 veya daha düşüktür. - Cihaz,
CONTROL_AE_AVAILABLE_PRIORITY_MODESiçindeCONTROL_AE_PRIORITY_MODE_SENSOR_EXPOSURE_TIME_PRIORITYreklamı yayınlamıyor.
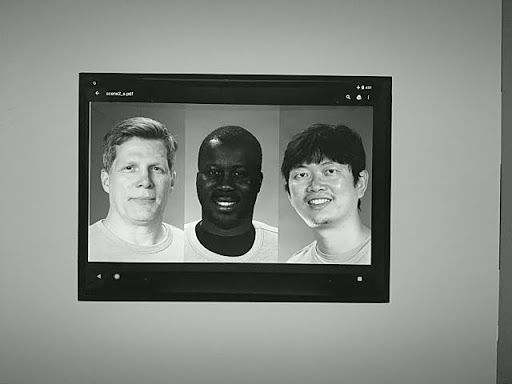
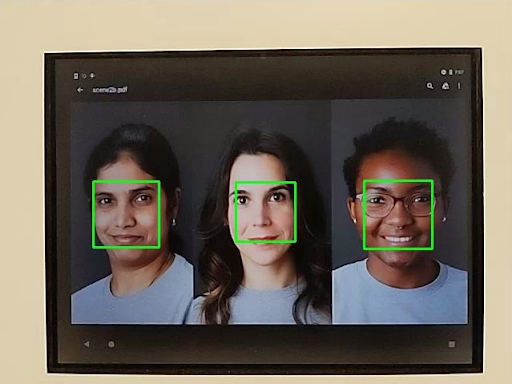
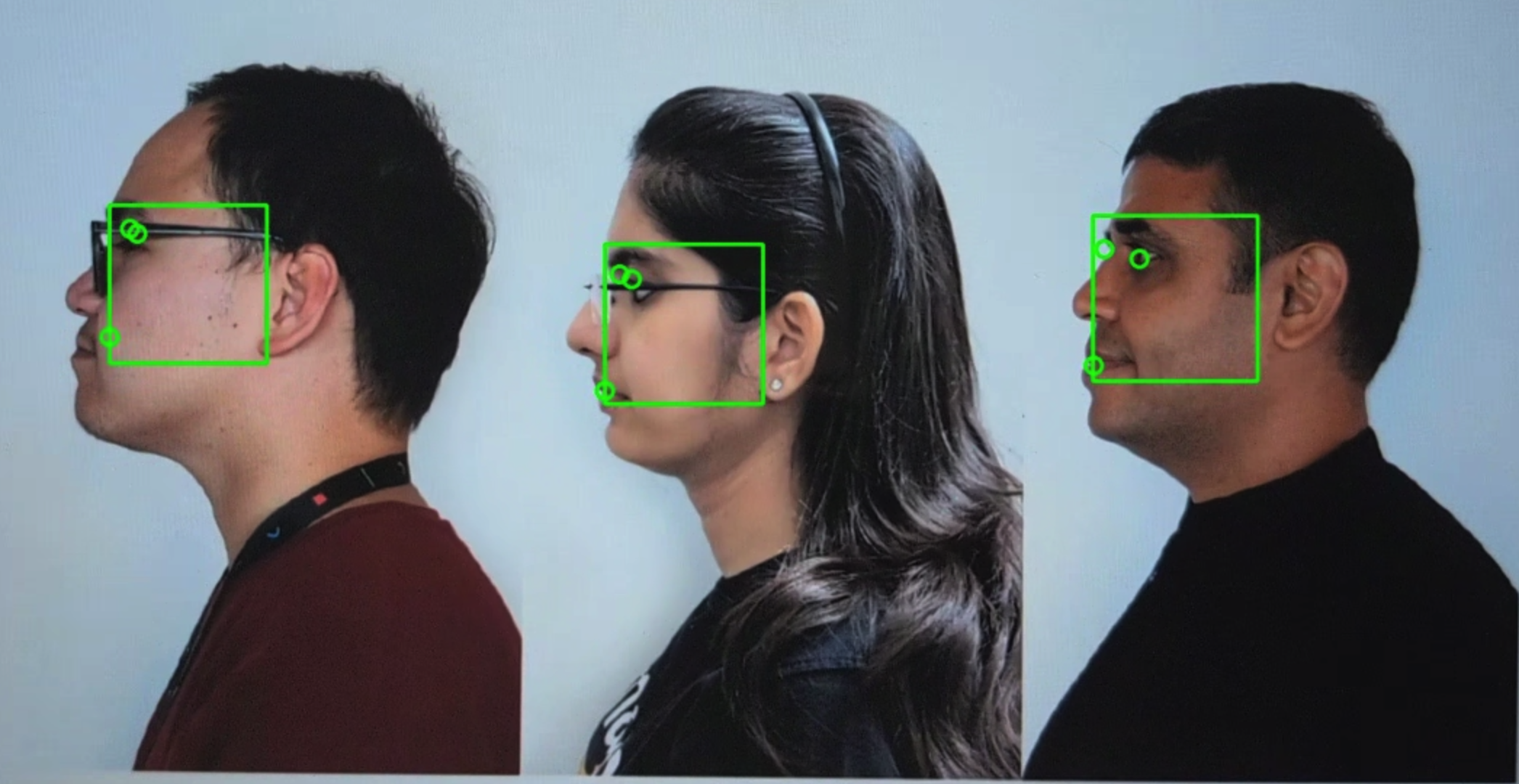
scene2_a
scene2_a, gri arka plan ve nötr renkli kıyafetler giyen üç yüz içeriyor. Yüzler, çeşitli cilt tonlarına sahip olacak şekilde seçilir. Yüz algılama özelliğinin optimum düzeyde çalışması için grafiğin doğru yönde olması gerekir.
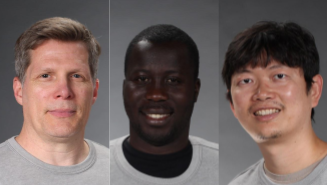
Şekil 98. scene2_a örneği.
test_autoframing
Kamera cihazının otomatik çerçeveleme davranışını test eder. Sahnedeki yüzlerin hiçbiri görünmeyecek şekilde büyük bir yakınlaştırma yapar, AUTOFRAMING değerini CaptureRequest içinde True olarak ayarlayarak otomatik çerçeveleme modunu etkinleştirir ve durum yakınlaştığında (yani AUTOFRAMING_STATE değeri CaptureResult içinde AUTOFRAMING_STATE_CONVERGED olarak ayarlandığında) orijinal sahnedeki tüm yüzlerin algılanıp algılanmadığını doğrular.
Test edilen API'ler:
android.hardware.camera2.CameraCharacteristics#CONTROL_AUTOFRAMING_AVAILABLEandroid.hardware.camera2.CaptureRequest#CONTROL_AUTOFRAMINGandroid.hardware.camera2.CaptureResult#CONTROL_AUTOFRAMINGandroid.hardware.camera2.CaptureResult#CONTROL_AUTOFRAMING_STATE
Geçti: Üç yüzün tamamı algılandı.
test_display_p3
Testler
Display P3
ColorSpaceProfiles API'si kullanılarak JPEG biçiminde yakalama. Çekilen JPEG'in başlığında uygun bir ICC profili olup olmadığını ve resmin sRGB gamının dışında renkler içerip içermediğini test eder.
Test edilen API'ler:
android.hardware.camera2.params.ColorSpaceProfilesandroid.hardware.camera2.params.SessionConfiguration#setColorSpace
Geçti: JPEG, Display P3 ICC profili ve sRGB gamının dışındaki renkleri içeriyor.
test_effects
Desteklenen kamera efektleri için kare yakalar ve bunların doğru şekilde oluşturulup oluşturulmadığını kontrol eder. Test yalnızca OFF ve MONO efektlerini kontrol eder ancak tüm desteklenen efektler için resimleri kaydeder.
Test edilen API'ler:
android.hardware.camera2.CameraCharacteristics#CONTROL_AVAILABLE_EFFECTSandroid.hardware.camera2.CaptureRequest#CONTROL_EFFECT_MODE
Geçiş: Sahne görüntüsünü OFF efektleriyle ve efektleri MONO olarak ayarlanmış tek renkli bir görüntüyle yakalar.
Şekil 99. test_effects_MONO.
test_exposure_keys_consistent
Bu test, AE özellikli bir çekimin ortalama parlaklığını, AE özellikli çekimin CaptureResult bölümünde alınan pozlama parametrelerini (hassasiyet, pozlama süresi, kare süresi, ham sonrası hassasiyet artışı) manuel olarak uygulayan AE özellikli olmayan bir çekimle karşılaştırır.
Test edilen API'ler:
android.hardware.camera2.CaptureRequest#SENSOR_SENSITIVITYandroid.hardware.camera2.CaptureRequest#SENSOR_EXPOSURE_TIMEandroid.hardware.camera2.CaptureRequest#SENSOR_FRAME_DURATIONandroid.hardware.camera2.CaptureRequest#CONTROL_POST_RAW_SENSITIVITY_BOOSTandroid.hardware.camera2.CaptureResult#SENSOR_SENSITIVITYandroid.hardware.camera2.CaptureResult#SENSOR_EXPOSURE_TIMEandroid.hardware.camera2.CaptureResult#SENSOR_FRAME_DURATIONandroid.hardware.camera2.CaptureResult#CONTROL_POST_RAW_SENSITIVITY_BOOST
Geçti: İki çekim arasındaki parlaklıkta göreli fark %4'ten azdır.
test_format_combos
Farklı çıkış biçimi kombinasyonlarını test eder.
Test edilen API'ler:
android.hardware.camera2.CameraCharacteristics#SCALER_STREAM_CONFIGURATION_MAPandroid.hardware.camera2.params.StreamConfigurationMap#getOutputSizes()android.hardware.camera2.CameraCaptureSession#captureBurst()
Başarılı: Tüm kombinasyonlar başarıyla yakalandı.
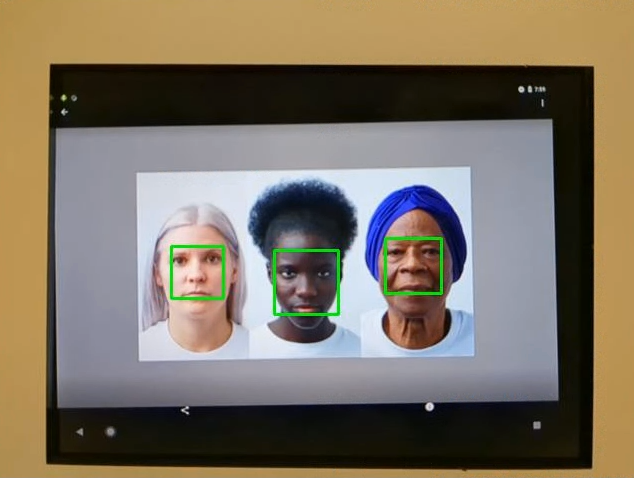
test_num_faces
Yüz algılamayı test eder.
Test edilen API'ler:
android.hardware.camera2.CaptureResult#STATISTICS_FACESandroid.hardware.camera2.CaptureResult#STATISTICS_FACE_DETECT_MODE
Geçti: Üç yüz bulur.
Şekil 100. test_num_faces yüz algılama modu 1 örneği.
test_reprocess_uv_swap
YUV yeniden işlemenin U ve V düzlemlerini değiştirmediği testler. Bu, yeniden işlenen görüntü ile yeniden işlenmemiş bir çekim arasındaki mutlak farkların toplamı (SAD) hesaplanarak tespit edilir. Yeniden işlenen yakalamanın çıkış U ve V düzlemlerinin değiştirilmesi SAD'nin artmasına neden oluyorsa çıkışın doğru U ve V düzlemlerine sahip olduğu varsayılır.
Test edilen API'ler:
android.hardware.camera2.CameraDevice#createCaptureSessionandroid.hardware.camera2.CameraMetadata#REQUEST_AVAILABLE_CAPABILITIES_YUV_REPROCESSINGandroid.hardware.camera2.CaptureRequest#EDGE_MODEandroid.hardware.camera2.CaptureResult#NOISE_REDUCTION_MODE
Geçti: U ve V düzlemleri değiştirilmez.
Şekil 101. test_reprocess_uv_swap örneği.
scene2_b
scene2_b, gri arka plan ve nötr renkli kıyafetler giyen üç yüz içeriyor. Yüzler, çeşitli cilt tonlarına sahip olacak şekilde seçilir. Yüz algılama özelliğinin optimum düzeyde çalışması için grafiğin doğru yönde olması gerekir.
test_preview_num_faces
Yüz sahnelerinde ten rengi çeşitliliğini artırarak yüz algılamayı önizlemede test eder.
Test edilen API'ler:
android.hardware.camera2.CaptureResult#STATISTICS_FACESandroid.hardware.camera2.CaptureResult#STATISTICS_FACE_DETECT_MODE
Geçti: Yüz sınırlama kutularında yüz işaret noktaları olan üç yüzü bulur.
Şekil 102. test_num_faces yüz algılama modu 1 örneği.
test_yuv_jpeg_capture_sameness
1920x1440 çözünürlüğü aşmayan en büyük JPEG biçimiyle aynı en boy oranına sahip, en büyük ortak YUV ve JPEG biçimlerini kullanarak iki görüntü yakalar.
jpeg.quality değerini 100 olarak ayarlar ve çift yüzeyli bir istek yakalar. Her iki resmi de RGB dizilerine dönüştürür ve iki resim arasındaki 3D karesi alınmış ortalama (RMS) farkını hesaplar.
Ayrıca bu test, desteklenen tüm akış kullanım alanları için YUV çıkışlarının, STILL_CAPTURE kullanım alanıyla YUV'ye makul ölçüde benzer olduğunu doğrular.
Test edilen API'ler:
android.hardware.camera2.CameraCharacteristics#SCALER_AVAILABLE_STREAM_USE_CASESandroid.hardware.camera2.CaptureRequest#JPEG_QUALITYandroid.graphics.ImageFormat#JPEG
Geçti: STILL_CAPTURE kullanım alanına yönelik YUV ve JPEG resimler, %3'ten daha az RMS (bir sinyalin ortalama karesinin karekök değeri) farkına sahiptir. Desteklenen tüm kullanım alanlarına yönelik YUV resimler, STILL_CAPTURE kullanım alanına yönelik YUV resimlerle% 4'ten daha az CIELAB farkına sahiptir.
scene2_c
test_num_faces
Yüz sahnelerinde ten rengi çeşitliliğini artırarak yüz algılamayı test eder.
Test edilen API'ler:
android.hardware.camera2.CaptureResult#STATISTICS_FACESandroid.hardware.camera2.CaptureResult#STATISTICS_FACE_DETECT_MODE
Geçti: Üç yüz bulur.
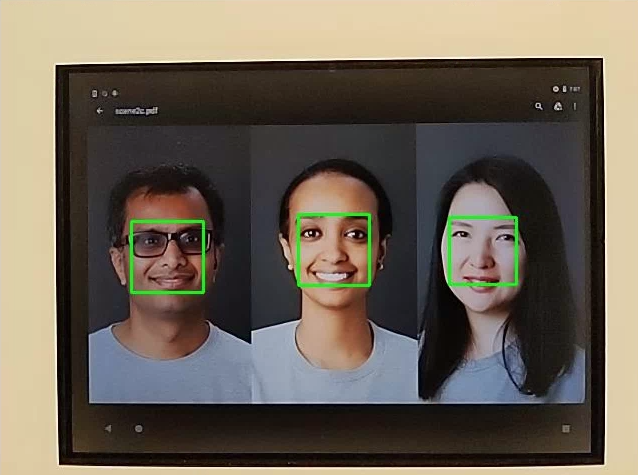
Şekil 103. test_num_faces yüz algılama modu örneği.
test_jpeg_capture_perf_class
CDD'deki 2.2.7.2 Kamera bölümünde belirtildiği gibi S performans sınıfı için JPEG yakalama gecikmesini test eder.
Geçti: Birincil kameraların her ikisi için de ITS aydınlatma koşulları (3.000 K) altında CTS kamera PerformanceTest ile ölçülen 1.080p çözünürlükte kamera2 JPEG yakalama gecikmesi < 1.000 ms OLMALIDIR.
test_camera_launch_perf_class
CDD'de bölüm 2.2.7.2 Kamera'de belirtildiği gibi S performans sınıfı için kamera başlatma gecikmesini test eder.
Geçti: Her iki birincil kamera için de ITS aydınlatma koşulları (3.000 K) altında CTS kamera PerformanceTest ile ölçülen kamera2 başlatma gecikmesi (kameranın ilk önizleme karesine açılması) < 600 ms olmalıdır.
test_default_camera_hdr
CDD'nin 2.2.7.2 Kamera bölümünde belirtildiği gibi, varsayılan kamera yakalamanın performans sınıfı 15 için Ultra HDR olup olmadığını test eder.
Geçti: Performans sınıfı 15 cihazlarda varsayılan kamera paketi yakalama işlemi Ultra HDR OLMALIDIR.
scene2_d
test_preview_num_faces
Yüz sahnelerinde ten rengi çeşitliliğini artırarak yüz algılamayı önizlemede test eder.
Test edilen API'ler:
android.hardware.camera2.CaptureResult#STATISTICS_FACESandroid.hardware.camera2.CaptureResult#STATISTICS_FACE_DETECT_MODE
Geçti: Yüz sınırlama kutularında yüz işaret noktaları olan üç yüzü bulur.
scene2_e
test_continuous_picture
50 VGA çözünürlüklü kare, önce yakalama isteği ayarıyla yakalanır.
android.control.afMode = 4 (CONTINUOUS_PICTURE).
Test edilen API'ler:
android.hardware.camera2.CaptureRequest#CONTROL_AF_MODEandroid.hardware.camera2.CaptureResult#CONTROL_AE_STATEandroid.hardware.camera2.CaptureResult#CONTROL_AF_STATEandroid.hardware.camera2.CaptureResult#CONTROL_AWB_STATE
Geçti: 3A sistemi, 50 karelik çekimin sonunda yerleşir.
test_num_faces
Yüz sahnelerinde ten rengi çeşitliliğini artırarak yüz algılamayı test eder.
Test edilen API'ler:
android.hardware.camera2.CaptureResult#STATISTICS_FACESandroid.hardware.camera2.CaptureResult#STATISTICS_FACE_DETECT_MODE
Geçiş: 3 yüz bulur.
scene2_f
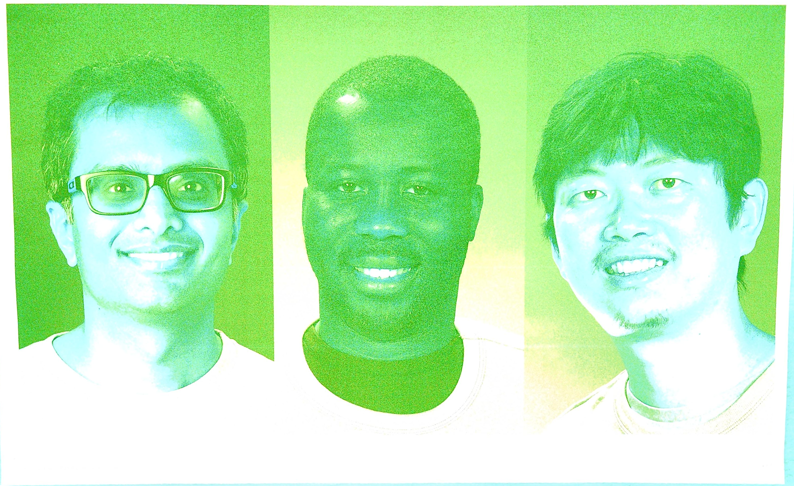
scene2_f beyaz arka plan ve beyaz kıyafetlerle üç yüz içeriyor. Yüzlerde çok çeşitli cilt tonları ve arka planla yüksek kontrast bulunuyor.

Şekil 104. scene2_f örneği.
test_preview_num_faces
Yüz sahnelerinde ten rengi çeşitliliğini artırarak yüz algılamayı test eder.
Test edilen API'ler:
android.hardware.camera2.CaptureResult#STATISTICS_FACESandroid.hardware.camera2.CaptureResult#STATISTICS_FACE_DETECT_MODE
Geçti: Yüz sınırlama kutularında yüz işaret noktaları olan üç yüzü bulur.
Şekil 105. test_num_faces_fd_mode_1 örneği.
scene2_g
scene2_g beyaz arka plan ve beyaz kıyafetlerle üç profil yüzü gösteriyor.
Yüzlerde çok çeşitli ten renkleri ve arka planla yüksek kontrast bulunur.

Şekil 106. scene2_g örneği.
test_preview_num_faces
Yüz sahnelerinde ten rengi çeşitliliğini artırarak yüz algılamayı test eder.
Test edilen API'ler:
android.hardware.camera2.CaptureResult#STATISTICS_FACESandroid.hardware.camera2.CaptureResult#STATISTICS_FACE_DETECT_MODE
Geçti: Yüz sınırlama kutularında yüz işaret noktaları olan üç yüzü bulur.
Şekil 107. test_preview_num_faces örneği.
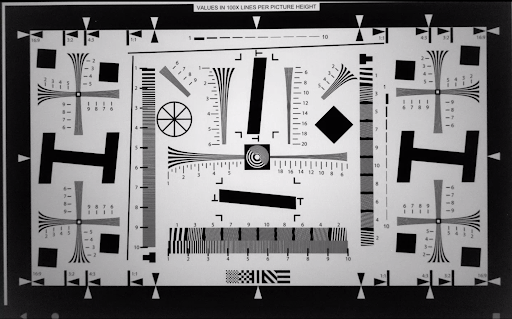
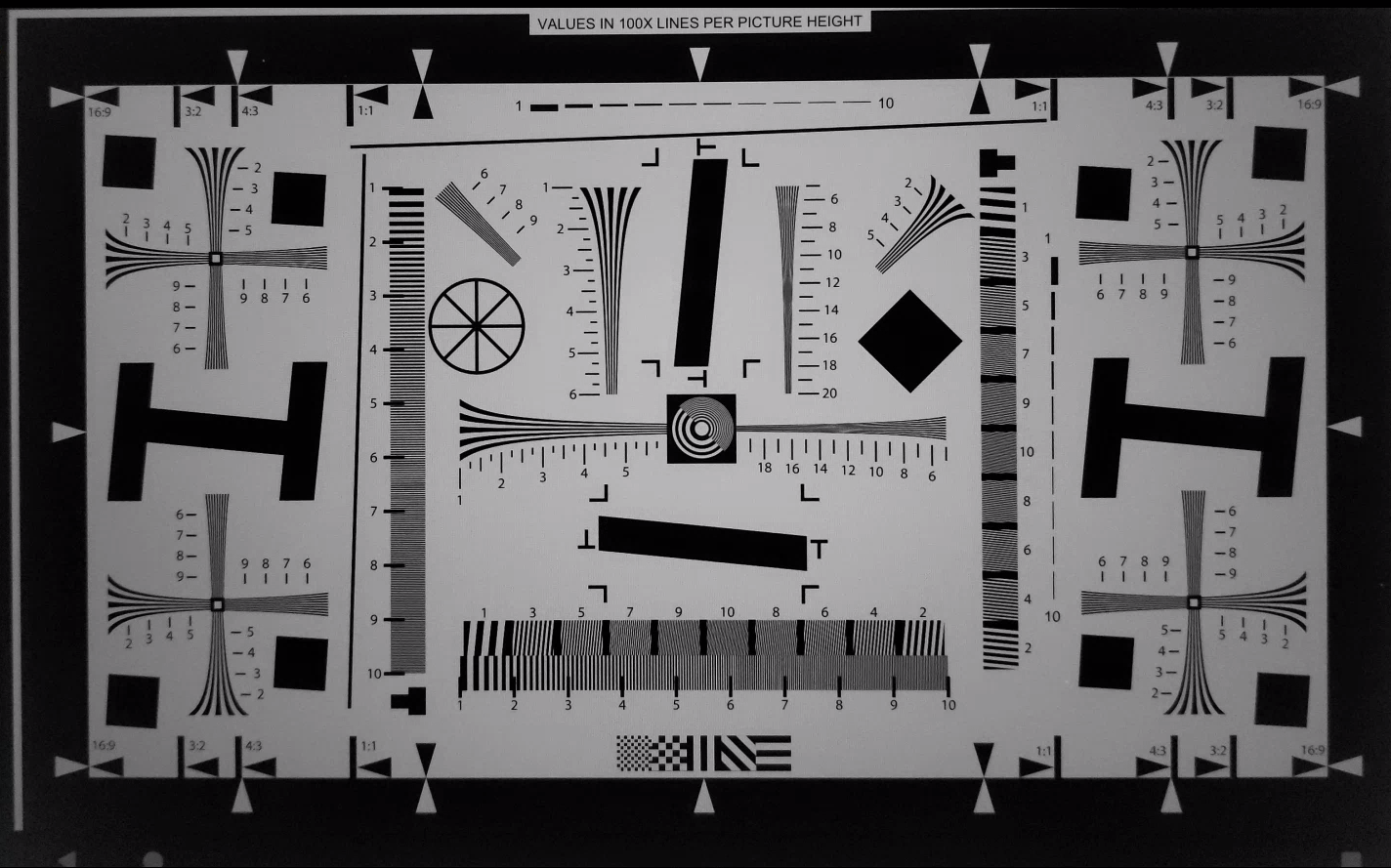
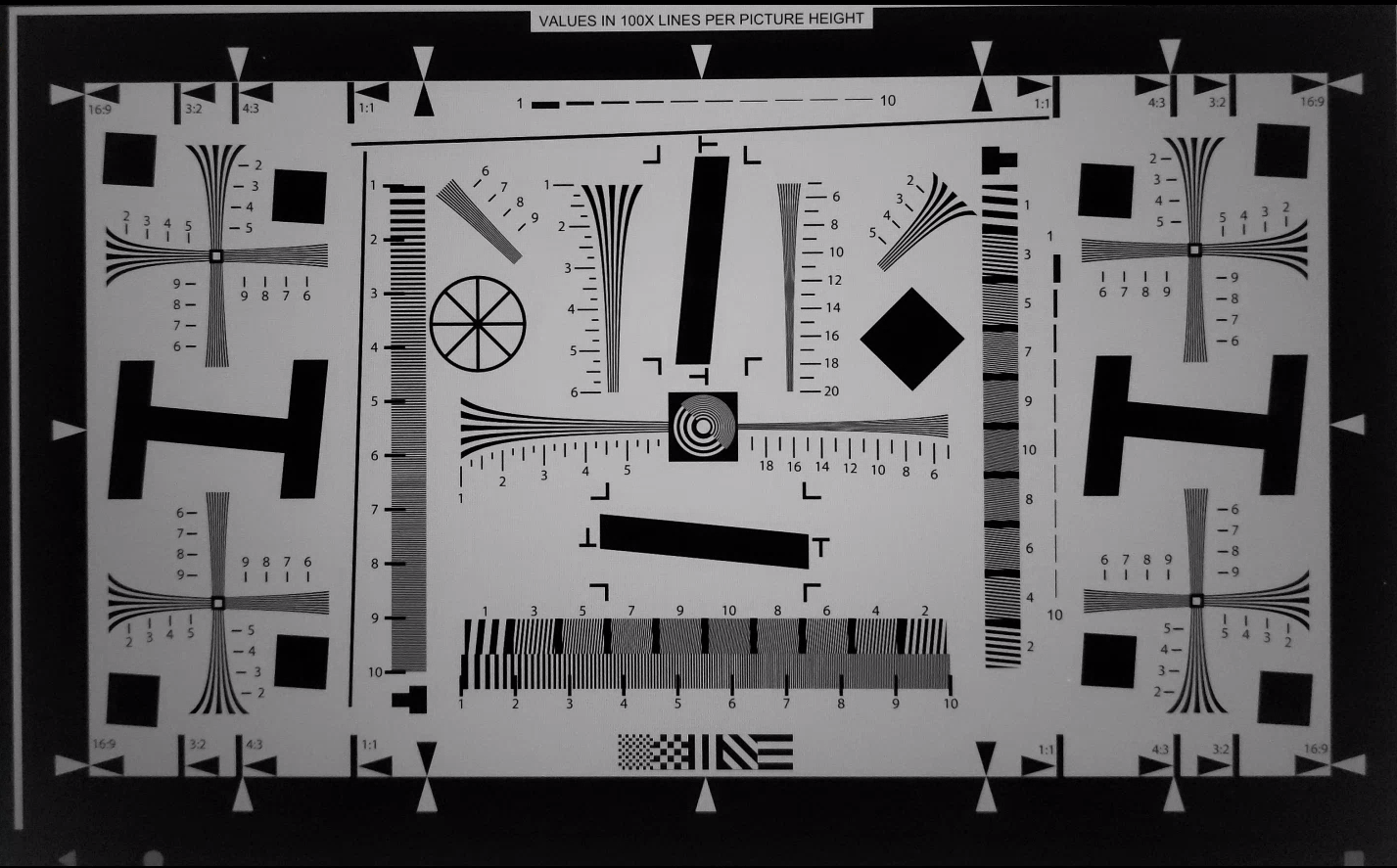
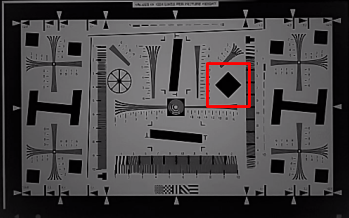
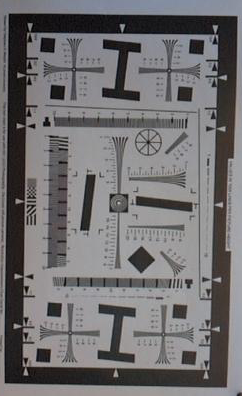
scene3
scene3, ISO12233 tablosunu kullanır ve çoğu test, sahnedeki tabloyu bulmak için tablo ayıklama yöntemini kullanır. Bu nedenle, kaydedilen resimlerin çoğu 1, 2 veya 4. sahnelerdeki resimler gibi kenarlıklara sahip değil, yalnızca grafiği içeriyor. Grafik bulucunun optimum şekilde çalışması için grafik doğru yönde olmalıdır.
Android 17 ve sonraki sürümlerde scene3, grafik algılama için ArUco işaretçilerini kullanır.

Şekil 108. scene3 grafiği.
test_edge_enhancement
android.edge.mode parametresinin doğru şekilde uygulandığını test eder. Her kenar modu için yeniden işlenmemiş görüntüleri yakalar ve çıkış görüntüsünün netliğini ve yakalama sonucu meta verilerini döndürür. Belirli bir kenar modu, hassasiyet, pozlama süresi, odak mesafesi ve çıkış yüzeyi parametresiyle yakalama isteğini işler. Android 17 ve sonraki sürümlerde, gerekli keskin kenarları içeren grafik alanını tanımlamak için ArUco işaretçileri kullanılır.
Geçti: HQ modu (2), OFF modundan (0) daha keskindir. FAST modu, OFF modundan (1) daha keskindir. HQ modu, FAST modundan daha keskin veya ona eşittir.
Test edilen API'ler:
Etkilenen kamera parametreleri:
EDGE_MODE
Şekil 109. test_edge_enhancement edge=0 örneği.
Şekil 110. test_edge_enhancement edge=1 (hızlı mod) örneği.
Şekil 111. test_edge_enhancement edge=2 (yüksek kalite modu) örneği.
test_flip_mirror
Resmin, CDD'deki 7.5.2 Ön Yüz Kamerası bölümünde belirtildiği şekilde doğru yönlendirilip yönlendirilmediğini test eder. Android 17 ve sonraki sürümlerde, grafiğin hem varlığını hem de yönünü doğrulamak için ArUco işaretçileri kullanılır. Aynalanmış, ters çevrilmiş veya döndürülmüş resimler, merkeze yakın konumdaki elmas özelliğiyle tanımlanabilir.
Geçti: Tüm işaretçiler algılanır ve doğru şekilde hizalanır. Resim çevrilmemiş, yansıtılmamış veya döndürülmemiş olmalıdır.
Şekil 112. test_flip_mirror sahne düzeltme eki örneği.
test_imu_drift
Cihaz hareketsizken ve yüksek çözünürlüklü önizleme yakalarken atalet ölçüm biriminin (IMU) 30 saniye boyunca sabit çıkış verip vermediğini test eder.
Test edilen API'ler:
android.hardware.Sensorandroid.hardware.SensorEventandroid.hardware.Sensor#TYPE_GYROSCOPEandroid.hardware.Sensor#TYPE_ROTATION_VECTOR
Pass:
- Jiroskopun kayması, test süresi boyunca 0,01 radyanın altındadır.
- Jiroskop okumasının varyansı, test süresi boyunca 1E-7 rad2/s2/Hz değerinden düşüktür.
- Dönüş vektörünün kayması, test süresi boyunca 0,01 rad'dan azdır.
- (Henüz zorunlu değil) Jiroskopun kayması saniyede 1 dereceden az olmalıdır.

Şekil 113. test_imu_drift jiroskop sapması örneği.

Şekil 114. test_imu_drift döndürme vektörü kayma örneği.
test_landscape_to_portrait
Yataydan dikeye geçiş geçersiz kılma işlevinin yatay yönlü sensörlerde doğru şekilde çalışıp çalışmadığını test eder.
Test edilen API'ler:
android.hardware.camera2.CameraCharacteristics#SCALER_AVAILABLE_ROTATE_AND_CROP_MODESandroid.hardware.camera2.CameraCharacteristics#SENSOR_ORIENTATIONandroid.hardware.camera2.CameraManager#getCameraCharacteristics
Geçti: Test, beklenen döndürmeye (yataydan dikeyye geçiş geçersiz kılındığında 0 derece, etkinleştirildiğinde 90 derece) sahip bir grafik bulur.
Şekil 115. test_landscape_to_portrait örneği.
test_lens_movement_reporting
Lens hareketi işaretinin düzgün şekilde bildirilip bildirilmediğini test eder. İlk 12 kare optimum odak mesafesinde (3A tarafından belirlendiği şekilde), son 12 kare ise minimum odak mesafesinde olmak üzere 24 resimlik bir seri çeker. 12. kare civarında, lens hareket ediyor ve bu da keskinliğin düşmesine neden oluyor. Lens son konuma hareket ederken keskinlik sonunda dengelenir.
Lens hareketi işareti, keskinliğin, lensin optimum odak mesafesinde sabit olduğu ilk birkaç karedeki keskinlik ile lensin minimum odak mesafesinde sabit olduğu son birkaç karedeki keskinlik arasında olduğu tüm karelerde onaylanmalıdır. Lensi hareket ettiren tam kare önemli değildir. Önemli olan, lens hareket ederken hareket işaretinin onaylanmasıdır.
Android 17 ve sonraki sürümlerde bu test, gerekli keskin kenarları içeren grafik alanını tanımlamak için ArUco işaretlerini kullanır. Bu yöntem, ultra geniş (UW) ile tele uygulamaları arasındaki kameralar için kararlı bir algılama sağlar.
Test edilen API'ler:
android.hardware.camera2.CameraCharacteristics#LENS_INFO_MINIMUM_FOCUS_DISTANCEandroid.hardware.camera2.CaptureResult#LENS_STATEandroid.hardware.camera2.CaptureResult#LENS_FOCUS_DISTANCEandroid.hardware.camera2.CaptureResult#SENSOR_TIMESTAMPandroid.hardware.camera2.CaptureRequest#LENS_FOCUS_DISTANCE
Geçti: Lens hareketi işareti, keskinlik değişikliği olan karede True.
Hata mekanizmaları:
lens_moving: True(android.hardware.camera2.CaptureResult#LENS_STATE= 1) intest_log.DEBUGyalnızca keskinliğin değişmediği karelerde onaylanır.lens_moving: False(android.hardware.camera2.CaptureResult#LENS_STATE= 0) değerine sahip karelerdetest_log.DEBUG, optimum odak uzaklığındaki ilk birkaç kareye veya minimum odak uzaklığındaki son birkaç kareye kıyasla keskinlik farkı vardır.
test_reprocess_edge_enhancement
Kenar geliştirme için desteklenen yeniden işleme yöntemlerinin düzgün çalışıp çalışmadığını test eder. Belirli bir yeniden işleme kenar moduyla yakalama isteğini işler ve yeniden işleme kenar modları devre dışı bırakılmışken yakalamak için farklı modları karşılaştırır.
Test edilen API'ler:
android.hardware.camera2.CaptureRequest#EDGE_MODEandroid.hardware.camera2.CaptureRequest#REPROCESS_EFFECTIVE_EXPOSURE_FACTOR
Geçti: Farklı kenar modlarının keskinliği doğru. HQ (mod 2), OFF (mod 0) modundan daha keskindir ve farklı modlar arasındaki iyileştirme benzerdir.
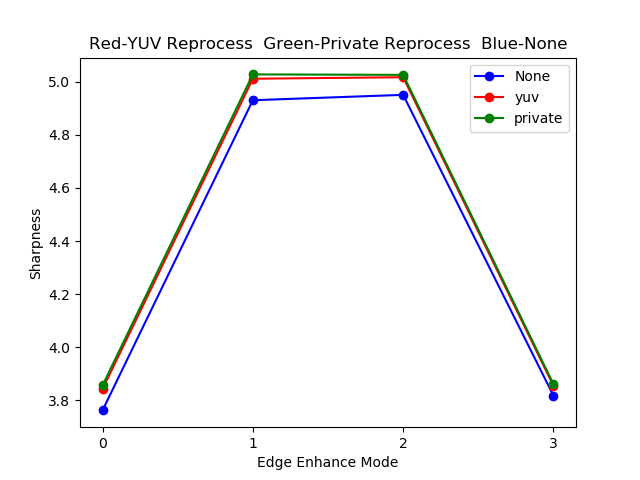
Şekil 116. test_reprocess_edge_enhancement grafiği örneği.
scene4
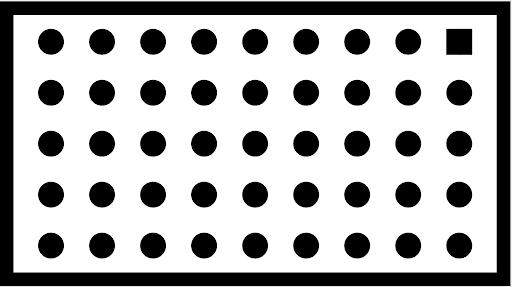
scene4, kare içinde beyaz arka plan üzerinde siyah bir daireden oluşur.
scene4'teki testler hizalamaya duyarlı olabilir. Bu nedenle, Android 15'ten itibaren DUT ve grafik hizalamasının kontrolünü etkinleştirmek için tools dizininde check_alignment.py kullanabilirsiniz.
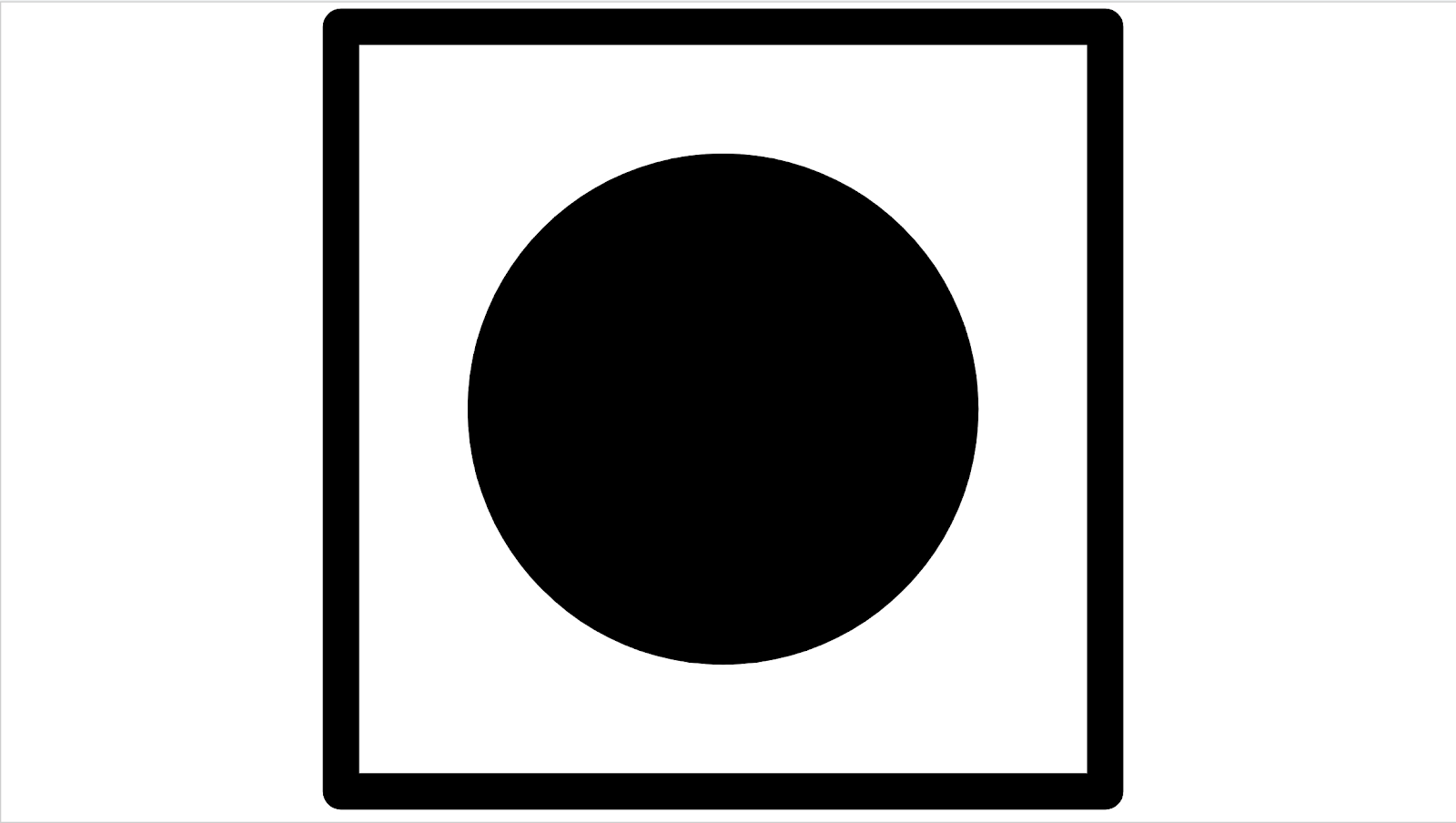
Şekil 117. scene4 örneği.
test_30_60fps_preview_fov_match
30 FPS ve 60 FPS önizleme videolarının aynı görüş alanına sahip olup olmadığını test eder. Testte biri 30 FPS, diğeri 60 FPS olmak üzere iki video çekilir. Her videodan temsili bir kare seçilir ve iki videodaki görüş alanı değişikliklerinin spesifikasyonlar dahilinde olup olmadığı doğrulanır. Dairenin en-boy oranının sabit kaldığını, dairenin merkezinin sabit kaldığını ve dairenin yarıçapının sabit kaldığını test eder.
Test edilen API'ler:
android.hardware.camera2.CaptureRequest#CONTROL_AE_TARGET_FPS_RANGEandroid.hardware.camera2.CaptureRequest#SENSOR_FRAME_DURATIONandroid.hardware.camera2.CaptureRequest#SENSOR_EXPOSURE_TIMEandroid.hardware.camera2.CaptureResult#LENS_DISTORTIONandroid.hardware.camera2.CaptureResult#LENS_FOCAL_LENGTHandroid.hardware.camera2.CaptureResult#LENS_INTRINSIC_CALIBRATION
Geçti: Resimler genişletilmiyor, resimlerin merkezi %3'ten fazla farklılık göstermiyor ve 30 FPS ile 60 FPS videolar arasındaki maksimum en boy oranı değişikliği %7,5'ten fazla değil.
Hata mekanizmaları:
- 30 FPS'lik videodaki daire, 60 FPS'lik videodaki daireden önemli ölçüde farklı bir boyuta sahip.
- Çekilen resimdeki daire, işleme hattı nedeniyle bozuluyor.
- Çekilen resimdeki daire, aşırı en-boy oranı nedeniyle kırpılıyor. Bu durum, resmin yüksekliğini veya genişliğini azaltan bir yakalama isteğinden kaynaklanıyor.
- Çekilen resimdeki dairenin ortasında yansıma var ve daire tam dolu görünmüyor.
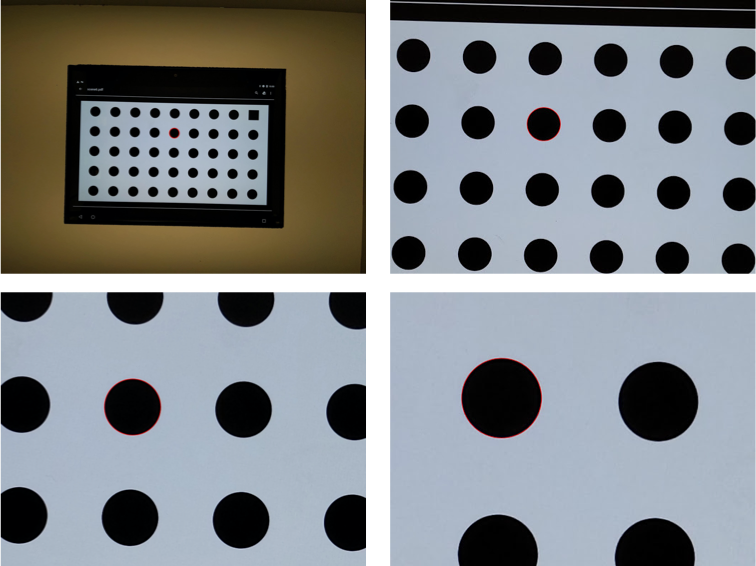
test_aspect_ratio_and_crop
Görüntü işlem hattında görüntülerin bozulup bozulmadığını veya beklenmedik şekilde kırpılıp kırpılmadığını test eder. Tüm biçimlerde bir dairenin fotoğrafını çeker. Dairenin bozulmadığını, dairenin resmin merkezinden hareket etmediğini ve dairenin farklı en-boy oranları veya çözünürlüklerle boyutunun yanlış şekilde değişmediğini doğrular.
Test edilen API'ler:
android.hardware.camera2.CaptureResult#LENS_DISTORTIONandroid.hardware.camera2.CaptureResult#LENS_FOCAL_LENGTHandroid.hardware.camera2.CaptureResult#LENS_INTRINSIC_CALIBRATION
Geçti: Resimler gerilmez, resimlerin merkezleri %3'ten fazla farklılık göstermez ve mümkün olan maksimum FoV korunur.
Hata mekanizmaları:
- Kamera, çekilen sahnenin ortasında tablette gösterilen daireyle aynı hizada değil.
- Çekilen resimdeki daire, işleme hattı nedeniyle bozuluyor.
- Düşük çözünürlüklü resim, görüntü işlem hattında iki kez kırpılarak yüksek ve düşük çözünürlüklü resimler arasında farklı bir görüş alanı oluşturuluyor.
- Çekilen resimdeki daire, aşırı en-boy oranı nedeniyle kırpılıyor. Bu durum, resmin yüksekliğini veya genişliğini azaltan bir yakalama isteğinden kaynaklanıyor.
- Çekilen resimdeki dairenin ortasında yansıma var ve daire tam dolu görünmüyor.
test_multi_camera_alignment
Çok kameralı sistemlerde kamera konumlandırmayla ilgili kamera kalibrasyon parametrelerini test eder. Çoklu kamera özelliğini kullanarak fiziksel alt kameralardan biriyle fotoğraf çekme Daire merkezini bulur. Daire merkezini her kamera için dünya koordinatlarına yansıtır. Kameraların daire merkezleri arasındaki farkı dünya koordinatlarında karşılaştırır. Dünya koordinatını piksel koordinatlarına yeniden yansıtır ve geçerlilik kontrolü olarak orijinallerle karşılaştırır. Kameraların odak uzaklıklarının farklı olup olmadığını kontrol ederek daire boyutlarını karşılaştırır.
Test edilen API'ler:
android.hardware.camera2.CameraCharacteristics#getPhysicalCameraIds()android.hardware.camera2.CameraCharacteristics#LENS_DISTORTIONandroid.hardware.camera2.CameraCharacteristics#LENS_INFO_AVAILABLE_FOCAL_LENGTHSandroid.hardware.camera2.CameraCharacteristics#LENS_INTRINSIC_CALIBRATIONandroid.hardware.camera2.CameraCharacteristics#LENS_POSE_ROTATIONandroid.hardware.camera2.CameraCharacteristics#LENS_POSE_TRANSLATIONandroid.hardware.camera2.CameraMetadata#REQUEST_AVAILABLE_CAPABILITIES_LOGICAL_MULTI_CAMERAandroid.hardware.camera2.CaptureRequest#SCALER_CROP_REGIONandroid.hardware.camera2.CaptureRequest#DISTORTION_CORRECTION_MODE
Geçti: Yansıtılan görüntülerde daire merkezleri ve boyutları, kamera kalibrasyon verileri ve odak uzaklıkları kullanılarak çekilen görüntülere kıyasla beklendiği gibidir.
Hata mekanizmaları:
LENS_INTRINSIC_CALIBRATION,LENS_POSE_TRANSLATIONveLENS_POSE_ROTATIONdeğerleri tasarım değerleridir ve gerçek kalibrasyon verileri değildir.- Kamera sistemi, test kurulumu için uygun değildir. Örneğin, RFoV test düzeneğiyle geniş ve ultra geniş kamera sistemi test ediliyordur. Daha fazla bilgi için Camera ITS-in-a-box FAQ Q1 başlıklı makaleyi inceleyin.
test_preview_aspect_ratio_and_crop
Hareketsiz çekimler için test_aspect_ratio_and_crop testine benzer şekilde, desteklenen önizleme biçimlerini kontrol ederek önizleme karelerinin uygunsuz şekilde uzatılmadığını veya kırpılmadığını doğrular. Dairenin en boy oranının değişmediğini, kırpılan resimlerde dairenin karenin ortasında kaldığını ve sabit bir biçimde veya farklı çözünürlüklerde (FoV kontrolü) daire boyutunun değişmediğini doğrular.
Test edilen API'ler:
android.hardware.camera2.CaptureResult#LENS_DISTORTIONandroid.hardware.camera2.CaptureResult#LENS_FOCAL_LENGTHandroid.hardware.camera2.CaptureResult#LENS_INTRINSIC_CALIBRATIONandroid.hardware.camera2.CameraCharacteristics#SCALER_AVAILABLE_STREAM_USE_CASESandroid.media.MediaRecorderandroid.media.CamcorderProfile
Geçti: Resimler gerilmez, resimlerin merkezleri %3'ten fazla farklılık göstermez ve mümkün olan maksimum FoV korunur.
test_preview_stabilization_fov
Görüş alanının uygun şekilde kırpıldığından emin olmak için desteklenen önizleme boyutlarını kontrol eder. Testte biri önizleme sabitleme ON, diğeri önizleme sabitleme OFF ile olmak üzere iki video çekilir. Her videodan temsili bir kare seçilir ve iki videodaki görüş alanı değişikliklerinin spesifikasyon dahilinde olup olmadığı doğrulanmak için analiz edilir.
Test edilen API'ler:
android.hardware.camera2.CameraCharacteristics#SCALER_AVAILABLE_STREAM_USE_CASESandroid.media.MediaRecorderandroid.media.CamcorderProfile
Geçti: Dairenin en boy oranı yaklaşık olarak sabit kalır, dairenin merkez konumu sabit kalır ve dairenin boyutu %20'den fazla değişmez.
test_video_aspect_ratio_and_crop
Tüm video biçimlerinde kare içinde dairenin videolarını çeker. Anahtar kareleri ayıklar ve dairenin en boy oranının değişmediğini, kırpılan resimlerde dairenin merkezde kaldığını ve daire boyutunun sabit bir biçimde veya farklı çözünürlükte değişmediğini (görüş alanı kontrolü) doğrular.
Test edilen API'ler:
android.hardware.camera2.CameraCharacteristics#SCALER_AVAILABLE_STREAM_USE_CASESandroid.hardware.camera2.CaptureResult#LENS_DISTORTIONandroid.hardware.camera2.CaptureResult#LENS_FOCAL_LENGTHandroid.hardware.camera2.CaptureResult#LENS_INTRINSIC_CALIBRATIONandroid.media.MediaRecorderandroid.media.CamcorderProfile
Geçti: Video kareleri genişletilmiyor, karelerin merkezi %3'ten fazla farklılık göstermiyor ve mümkün olan maksimum FoV korunuyor.
scene6
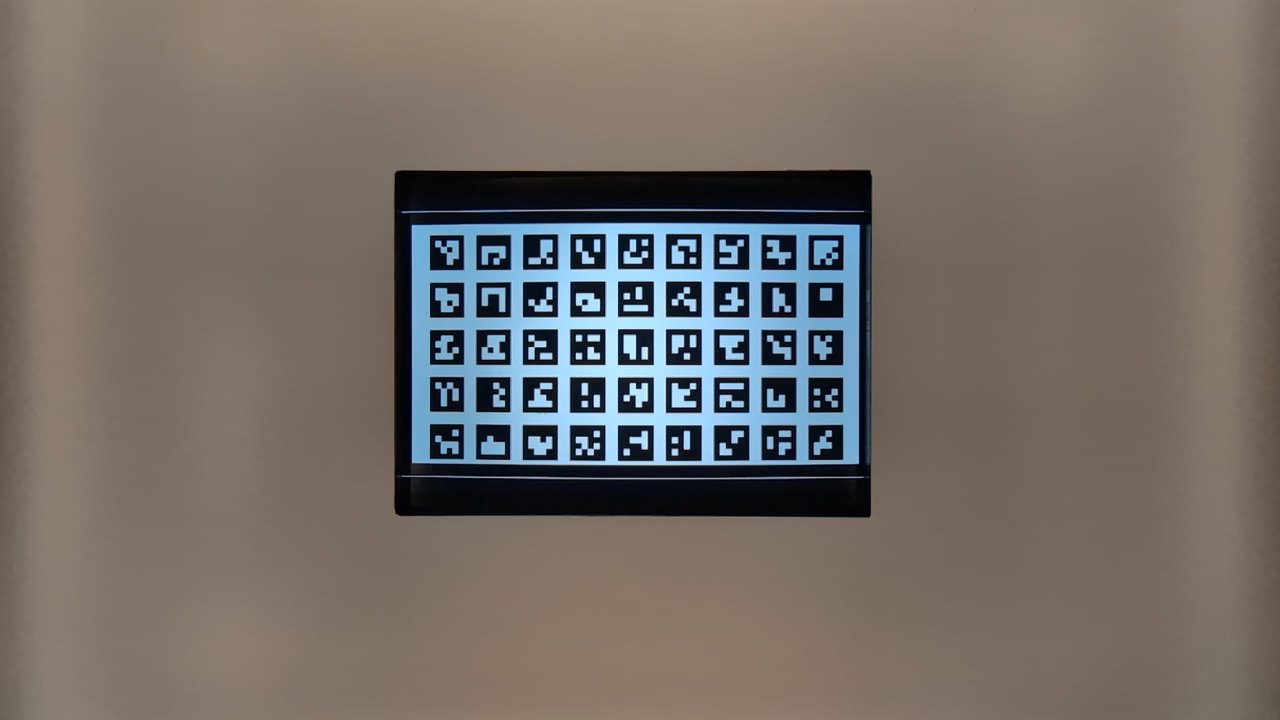
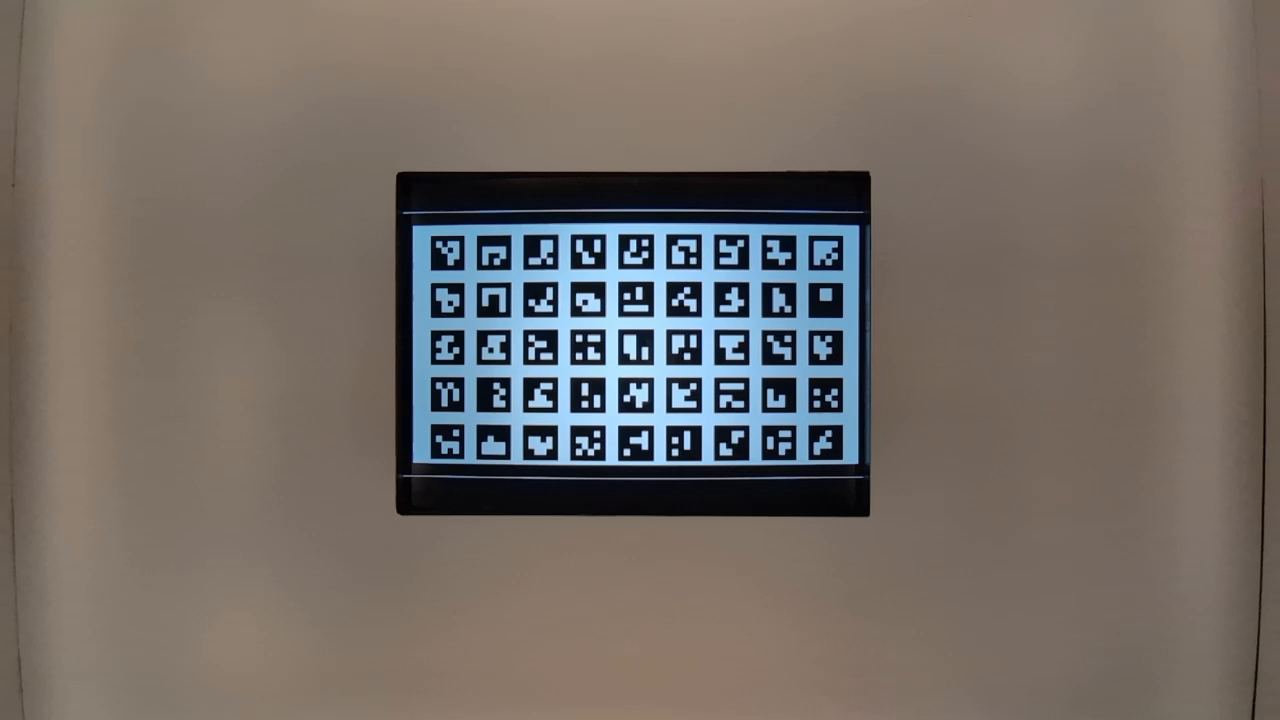
scene6, benzersiz şekilde tanımlanabilen ArUco işaretlerinden oluşan bir ızgaradır.
scene6 içindeki testler hizalamaya duyarlı olabilir. Bu nedenle, 15'ten itibaren, DUT ve grafik hizalamasının kontrolünü etkinleştirmek için araçlar dizininde check_alignment.py kullanabilirsiniz.
Şekil 118. scene6 örneği.
test_in_sensor_zoom
Kameranın sensör içi yakınlaştırma özelliğinin davranışını test eder. Bu özellik, kırpılmış ham görüntüler üretir.
Yayın kullanım alanı CROPPED_RAW olarak ayarlandığında test, yakınlaştırma aralığında iki çekim yapar: tam FoV ham görüntü ve kırpılmış ham görüntü. Test, görüntüleri RGB dizilerine dönüştürür, tam boyutlu kırpılmış ham görüntüyü SCALER_RAW_CROP_REGION tarafından bildirilen boyuta küçültür ve iki görüntü arasındaki 3D RMS farkını hesaplar.
Test edilen API'ler:
android.hardware.camera2.CameraCharacteristics#CONTROL_ZOOM_RATIO_RANGEandroid.hardware.camera2.CameraCharacteristics#SCALER_AVAILABLE_STREAM_USE_CASESandroid.hardware.camera2.CameraMetadata#SCALER_AVAILABLE_STREAM_USE_CASES_CROPPED_RAWandroid.hardware.camera2.CaptureRequest#CONTROL_ZOOM_RATIOandroid.hardware.camera2.CaptureResult#SCALER_RAW_CROP_REGION
Geçti: Ölçeği küçültülmüş kırpılmış ham görüntü ile tam FoV ham görüntü arasındaki 3D RMS farkı, testte belirlenen eşikten daha azdır.
test_zoom
Ultra geniş lensten geniş lense kamera yakınlaştırma davranışını test eder. Yakınlaştırma aralığında çekim yapar ve kamera yakınlaştırıldığında ArUco işaretçilerinin büyüyüp büyümediğini kontrol eder. Test ayrıca merkez işaretçinin konumunun her yakalama işleminde tahmin edilebilir şekilde değişip değişmediğini de kontrol eder. Merkez işaretçinin merkezinden görüntü merkezine olan mesafe, fiziksel kamera geçişine kadar yakınlaştırma oranıyla ilgili olarak sabit bir hızda değişebilir veya fiziksel kamera geçişinden sonra aynı işaretçinin konumuna doğru monoton bir şekilde değişebilir. Testten önce cihaza Jetpack Camera App (JCA) yüklenmelidir.
Test edilen API'ler:
android.hardware.camera2.CameraCharacteristics#CONTROL_ZOOM_RATIO_RANGEandroid.hardware.camera2.CameraCharacteristics#LENS_INFO_AVAILABLE_FOCAL_LENGTHSandroid.hardware.camera2.CaptureRequest#CONTROL_ZOOM_RATIOandroid.hardware.camera2.CaptureResult#LENS_FOCAL_LENGTH
Geçti: Kameranın doğru şekilde yakınlaştırdığını doğrulamak için yakalanan ArUco işaretçisinin göreceli boyutu, istenen yakınlaştırma oranıyla karşılaştırıldığında doğru olmalı ve işaretçi ile görüntü merkezi arasındaki mesafe, test açıklamasında belirtilen ölçütlere göre değişmelidir.
Merkeze en yakın ArUco işaretçisinin konturunu bulmak için Şekil 119. test_zoom.
test_low_latency_zoom
Kameranın düşük gecikmeli yakınlaştırma davranışını test eder. android.control.settingsOverride = 1 (SETTINGS_OVERRIDE_ZOOM) ile yakınlaştırma aralığında çekim yapar ve çıkış resimlerindeki işaretçilerin, çekim meta verilerindeki yakınlaştırma oranlarıyla eşleşip eşleşmediğini kontrol eder. 3A'yı yakınlaştırmak ve çekim yapmak için aynı kamera yakalama oturumu kullanılır.
Test edilen API'ler:
android.hardware.camera2.CameraCharacteristics#CONTROL_AVAILABLE_SETTINGS_OVERRIDESandroid.hardware.camera2.CameraCharacteristics#CONTROL_ZOOM_RATIO_RANGEandroid.hardware.camera2.CaptureRequest#CONTROL_SETTINGS_OVERRIDEandroid.hardware.camera2.CaptureRequest#CONTROL_ZOOM_RATIOandroid.hardware.camera2.CaptureResult#CONTROL_SETTINGS_OVERRIDE
Geçti: Yakalanan işaretçinin göreli boyutu, yakınlaştırma oranı sonuç meta verilerine göre doğrudur.
test_preview_video_zoom_match
Kaydederken ve yakınlaştırırken video önizlemesi ile video çıkışının aynı çıkışı gösterip kaydettiği testler. Farklı yakınlaştırma oranlarında merkeze en yakın işaretçinin boyutunu hesaplar ve yakınlaştırma oranı arttıkça işaretçinin boyutunun artıp artmadığını kontrol eder.
Test edilen API'ler:
android.hardware.camera2.CameraCharacteristics#CONTROL_ZOOM_RATIO_RANGEandroid.hardware.camera2.CameraCharacteristics#LENS_INFO_AVAILABLE_FOCAL_LENGTHSandroid.hardware.camera2.CaptureRequest#CONTROL_ZOOM_RATIOandroid.hardware.camera2.CaptureResult#LENS_FOCAL_LENGTH
Geçti: Yakalanan işaretçinin göreli boyutu, videoda ve önizlemede istenen yakınlaştırma oranıyla doğru orantılıdır.
Şekil 120. HD_1280x720_key_frame.png (yakınlaştırmadan önce).
Şekil 121. preview_1280x720_key_frame.png (yakınlaştırmadan önce).
Şekil 122. HD_1280x720_key_frame.png (yakınlaştırmadan sonra).
Şekil 123. preview_1280x720_key_frame.png (yakınlaştırmadan sonra).
test_preview_zoom
Her önizleme karesinin yakınlaştırma oranının, ultra geniş lensten geniş lense karşılık gelen yakalama meta verileriyle eşleştiği testler. Test, yakınlaştırma aralığındaki önizleme karelerini alır ve merkeze en yakın ArUco işaretçisini bulur. Ardından test, merkez işaretçinin konumunun her yakalama işleminde tahmin edilebilir şekilde değişip değişmediğini kontrol eder. Merkez işaretçinin merkezinden görüntü merkezine olan mesafe, fiziksel kamera geçişine kadar yakınlaştırma oranıyla ilgili olarak sabit bir hızda değişebilir veya fiziksel kamera geçişinden sonra aynı işaretçinin konumuna doğru monoton bir şekilde değişebilir.
Test edilen API'ler:
android.hardware.camera2.CameraCharacteristics#CONTROL_ZOOM_RATIO_RANGEandroid.hardware.camera2.CameraCharacteristics#LENS_INFO_AVAILABLE_FOCAL_LENGTHSandroid.hardware.camera2.CaptureRequest#CONTROL_ZOOM_RATIOandroid.hardware.camera2.CaptureResult#LENS_FOCAL_LENGTH
Geçti: Seçilen ArUco işaretçisinin göreli boyutu, önizleme karelerinin tümünde ilgili yakalama sonucunun bildirilen yakınlaştırma oranı için doğrudur. Seçilen işaretçinin resmin merkezine olan göreceli uzaklığı, tüm önizleme karelerinin ilgili yakalama sonucunun bildirilen yakınlaştırma oranı için doğrudur.
Şekil 124. Merkez noktaya en yakın işaretçiyi gösteren test_preview_zoom resimleri
test_session_characteristics_zoom
CameraCharacteristics#INFO_SESSION_CONFIGURATION_QUERY_VERSION bölümünde listelenen tüm desteklenen oturum yapılandırmaları için yakınlaştırma oranı aralığını test eder.
Bu yapılandırmaların her biri için CameraDeviceSetup#isSessionConfigurationSupported
true değerini döndürürse test, CameraDeviceSetup#getSessionCharacteristics
içinde döndürülen yakınlaştırma oranı aralığına ulaşılabildiğini doğrular.
Test edilen API'ler:
android.hardware.camera2.CameraCharacteristics#INFO_SESSION_CONFIGURATION_QUERY_VERSIONandroid.hardware.camera2.CameraDevice.CameraDeviceSetup#isSessionConfigurationSupportedandroid.hardware.camera2.CameraDevice.CameraDeviceSetup#getSessionCharacteristics
Geçti: CameraCharacteristics#INFO_SESSION_CONFIGURATION_QUERY_VERSION bölümünde listelenen her desteklenen SessionConfiguration için hem minimum hem de maksimum yakınlaştırma oranına ulaşılabilir.
scene7
scene7, her biri farklı bir renkle doldurulmuş dört eşit çeyrek daireye bölünmüş dikdörtgen bir çerçevedir. Dikdörtgenin ortasında, keskinlik kontrolleri için eğimli kenarlı bir grafik yer alır. Dört ArUco işaretleyici, dikdörtgenin dört dış köşesiyle hizalanarak farklı yakınlaştırma oranlarında ana dikdörtgen çerçevesinin doğru koordinatlarının elde edilmesine yardımcı olur.
Şekil 125. scene7.
test_multi_camera_switch
Bu test, farklı yakınlaştırma oranlarında önizleme kaydı sırasında ultra geniş (UW) ve geniş (W) lensler arasında geçiş yapıldığında benzer RGB değerleri elde edildiğini doğrular.
Test, dinamik önizleme kaydı yapmak ve fiziksel kameranın değiştiği noktayı belirlemek için önceden tanımlanmış aralıkta farklı yakınlaştırma oranları kullanır. Bu nokta, UW'den W lense geçişi gösterir.
Çakışma noktasında ve öncesinde çekilen kareler; otomatik pozlama (AE), otomatik beyaz dengesi (AWB) ve otomatik odaklama (AF) açısından analiz edilir.
AE kontrolü, lümen değişikliğinin hem UW hem de W lens görüntüleri için beklenen aralıkta olduğunu doğrular. AWB kontrolü, kırmızı-yeşil ve mavi-yeşil oranlarının hem UW hem de W lens görüntüleri için eşik değerleri içinde olduğunu doğrular. AF kontrolü, UW ve W lens görüntüleri arasındaki ortalama gradyan büyüklüğüne göre netlik tahmini değerini değerlendirir.
Bu testi yürütürken Moire efekti sonuçları etkilerse Camera ITS onaylı tabletler listesinden daha yüksek çözünürlüklü bir tablet kullanın.
Test edilen API'ler:
android.hardware.camera2.CameraCharacteristics#CONTROL_ZOOM_RATIO_RANGEandroid.hardware.camera2.CaptureRequest#CONTROL_ZOOM_RATIOandroid.media.CamcorderProfileandroid.media.MediaRecorder
Geçti: Testin başarılı olması için AE ve AWB kontrollerinin başarılı olması gerekir. AF kontrolü sonuçları yalnızca günlük kaydı amacıyla kullanılır. Her bir kontrolün ölçütleri şunlardır:
- AE kontrolü: Cihaz hem
ae_regionshem deawb_regionsdeğerini destekliyorsa UW ve W lens görüntüleri arasındaki parlaklık değişimi (Y değeri), tüm renk yamaları için% 4'ten az olmalıdır. Yalnızcaae_regionsdestekleniyorsa yalnızca gri renk yaması değerleri ölçütleri karşılamalıdır. - AWB kontrolü: Cihaz hem
ae_regionshem deawb_regionsdeğerini destekliyorsa UW ve W lens görüntülerinin kırmızı-yeşil ve mavi-yeşil değerleri arasındaki fark, gri renk yaması için% 3'ten, diğer renk yamaları için ise% 10'dan az olmalıdır. - AF kontrolü: W lensiyle çekilen görüntünün keskinliği, UW ile çekilen görüntünün keskinliğinden daha yüksek olmalıdır.
Şekil 126. UW lensiyle çekilmiş gri yama.

Şekil 127. W lensiyle çekilmiş gri yama.
scene8
scene8, dört eşit bölgeye ayrılmış dikdörtgen bir çerçevedir. Her bölgede farklı pozlamayla çekilmiş veya farklı bir renk tonuyla (mavi ton, artırılmış pozlama, azaltılmış pozlama, sarı ton) kaplanmış bir portre bulunur.
Ana dikdörtgen çerçevesinin doğru koordinatlarını elde etmek için dört ArUco işaretleyici, dikdörtgenin dört dış köşesiyle hizalanır.

Şekil 128. scene8 örneği.
test_ae_awb_regions
Farklı AE ve AWB bölgelerinde önizleme kaydı yapılırken RGB ve parlaklık değerlerinin farklı olduğunu test eder.
Testte 8 saniyelik bir önizleme kaydı alınır. Her çeyrekte 2 saniye boyunca AE ve AWB ölçümü yapılır. Ardından test, her bölgenin önizleme kaydından bir kare çıkarır ve çıkarılan kareleri kullanarak aşağıdaki AE ve AWB kontrollerini gerçekleştirir:
- AE kontrolü: Azaltılmış pozlamaya sahip bölgeyi ölçen karenin, artırılmış pozlamaya sahip bölgeyi ölçen kareye kıyasla% 1'den fazla artırılmış parlaklık değerine sahip olduğunu doğrular. Bu, karanlık bir bölge ölçülürken görüntülerin aydınlatıldığını doğrular.
- AWB kontrolü: Mavi ölçüm bölgesini içeren karedeki kırmızı-mavi oranının (görüntünün ortalama RGB değerleri) sarı ölçüm bölgesini içeren kareden %2'den fazla yüksek olduğunu doğrular. Bu, sarı (sıcak) veya mavi (soğuk) bir bölge ölçülürken görüntülerin dengeli bir RGB değerine sahip olduğunu doğrular.
Test edilen API'ler:
android.hardware.camera2.CaptureRequest#CONTROL_AWB_REGIONSandroid.hardware.camera2.CaptureRequest#CONTROL_AE_REGIONSandroid.hardware.camera2.CameraCharacteristics#CONTROL_MAX_REGIONS_AEandroid.hardware.camera2.CameraCharacteristics#CONTROL_MAX_REGIONS_AWB
Geçti: AE ve AWB kontrolleri başarılı oldu.

Şekil 129. Pozlama artırılarak karanlık bölge çerçeve ölçümü yapılır.

Şekil 130. Pozlama azaltılarak daha açık bölge çerçevesinde ölçüm yapılır.
Hata mekanizmaları:
Bu test için dört ArUco işaretçisinin de doğru şekilde algılanması gerekir. İlk algılama başarısız olursa sistem, görüntünün siyah beyaz bir sürümünü kullanarak ikinci bir algılama geçişi yapmaya çalışır. Aşağıdaki gri tonlamalı resimde ikincil işleme adımı gösterilmektedir:

Şekil 131. ArUco işaretçilerinin yanlış hizalanması.
test_color_correction_mode_cct
Farklı renk sıcaklıkları ve tonlarında COLOR_CORRECTION_MODE testleri yaparak RGB oranlarındaki değişiklikleri yakalama sahnesi scene8 ile karşılaştırın.
Test edilen API'ler:
android.hardware.camera2.CaptureRequest#COLOR_CORRECTION_MODEandroid.hardware.camera2.CaptureResult#COLOR_CORRECTION_MODEandroid.hardware.camera2.CaptureRequest#COLOR_CORRECTION_COLOR_TEMPERATUREandroid.hardware.camera2.CaptureResult#COLOR_CORRECTION_COLOR_TEMPERATUREandroid.hardware.camera2.CaptureRequest#COLOR_CORRECTION_COLOR_TINTandroid.hardware.camera2.CaptureResult#COLOR_CORRECTION_COLOR_TINTandroid.hardware.camera2.CameraCharacteristics#COLOR_CORRECTION_COLOR_TEMPERATURE_RANGEandroid.hardware.camera2.CameraMetadata#COLOR_CORRECTION_MODE_CCTandroid.hardware.camera2.CameraCharacteristics#COLOR_CORRECTION_AVAILABLE_ABERRATION_MODES
Geçti: RGB oranları, seçilen renk sıcaklıkları ve tonlarına göre beklenen artış veya azalmaları gösteriyor.
Test atlama ölçütleri
Aşağıdaki ölçütlerden herhangi biri karşılanırsa test_color_correction_mode_cct testi atlanır:
- Cihazın ilk API düzeyi (
first_api_level) 35 veya daha düşüktür. - Cihaz,
COLOR_CORRECTION_AVAILABLE_ABERRATION_MODESiçindeCOLOR_CORRECTION_MODE_CCTreklamı yayınlamıyor.
scene9
scene9, JPEG sıkıştırma algoritmalarını zorlamak için çok düşük tekrarlanabilirlik seviyesine sahip bir sahne oluşturmak üzere rastgele boyut ve renkte binlerce daireden oluşur.
Şekil 132. scene9 örneği.
test_jpeg_high_entropy
Kamera JPEG sıkıştırmasının, scene9 üzerinde yüksek entropiyle ve JPEG kalite faktörü %100 olarak ayarlanmış şekilde çalıştığını test edin. Tablette gösterilen sahnenin kamera FoV'unu doldurduğunu doğrulamak için yakınlaştırma faktörü artırılır.
Test edilen API'ler:
Geçti: JPEG dosyası düzgün şekilde sıkıştırılmış, yazılmış ve diskten geri okunmuştur.
test_jpeg_quality
Kameranın JPEG sıkıştırma kalitesini test eder. JPEG kalitelerini android.jpeg.quality ile adım adım ilerletir ve nicemleme tablolarının doğru şekilde değiştiğini doğrular.
Test edilen API'ler:
Geçti: Kalite arttıkça nicemleme matrisi azalır. (Matris, bölme faktörünü gösterir.)
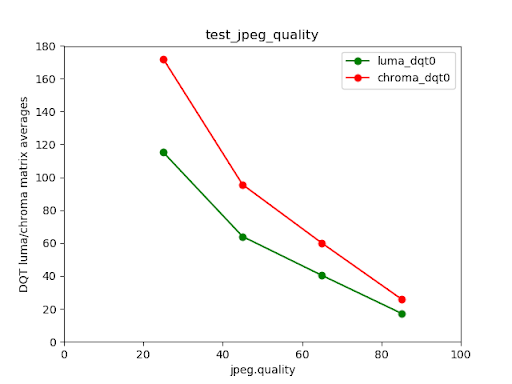
Şekil 133. Pixel 4 arka kamera parlaklık ve renk DQT matrisi ortalamaları ile JPEG kalitesi karşılaştırması.
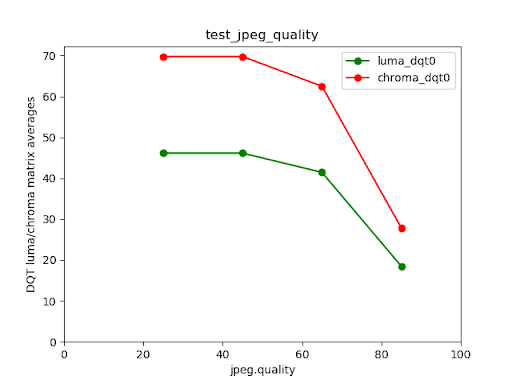
Şekil 134. Başarısız test örneği.
scene_extensions
scene_extensions testleri kamera uzantıları içindir ve test ortamının hassas kontrolünü gerektirdiğinden Camera ITS-in-a-Box kullanılmalıdır. Ayrıca, ışık sızıntısının da kontrol edilmesi gerekir. Bu işlem için test düzeneğini, DUT'yi ve tableti bir örtüyle kapatmanızın yanı sıra DUT'nin ön ekranından ışık sızmasını engellemeniz gerekebilir.
scene_hdr
scene_hdr sahnesi, sol tarafta bir portre ve sağ tarafta düşük kontrastlı bir QR kodundan oluşuyor.
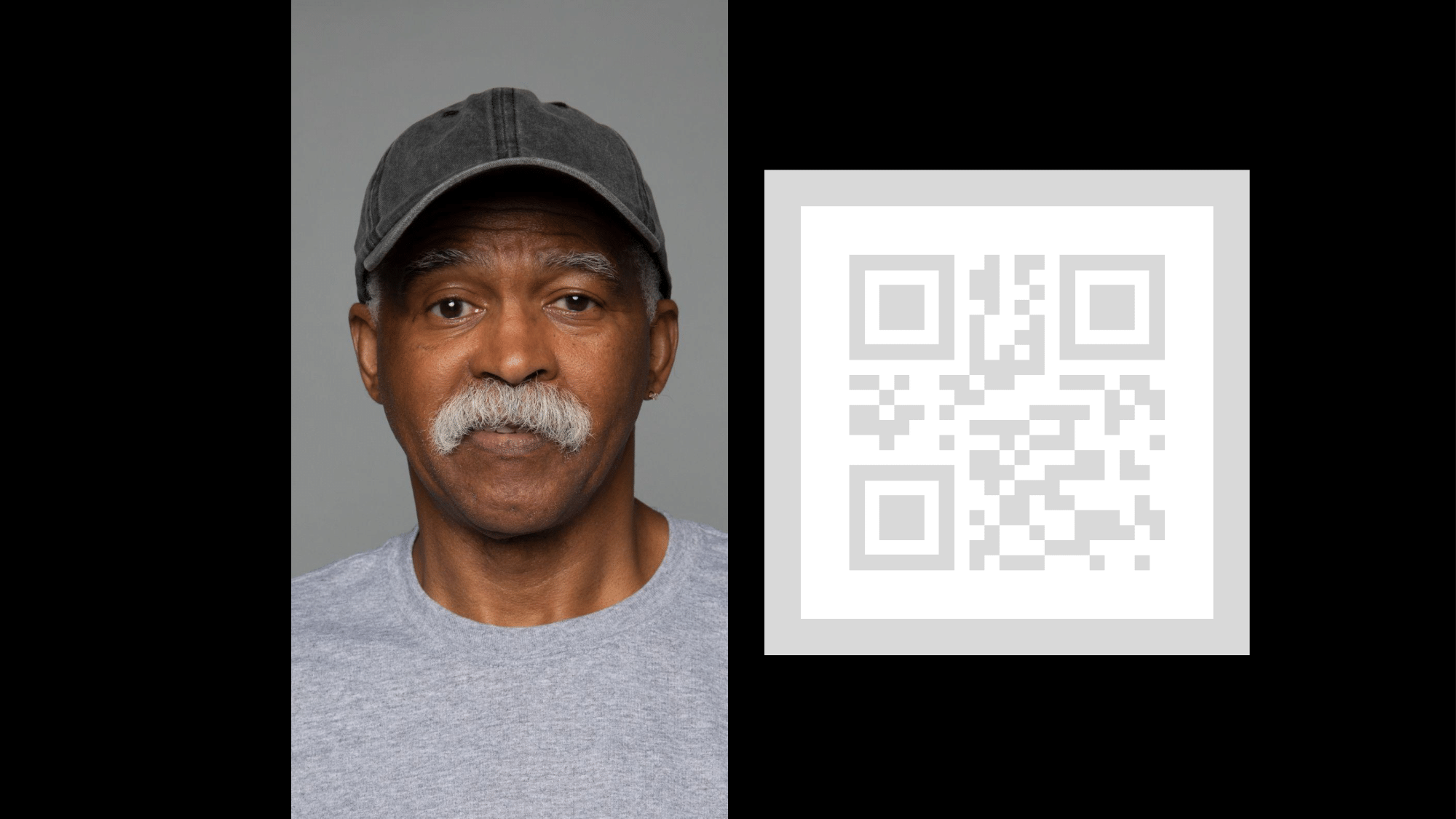
Şekil 135. scene_hdr örneği.
test_hdr_extension
HDR uzantısını test eder. Uzantı etkinleştirilmiş ve etkinleştirilmemişken yakalama işlemleri yapar ve uzantının QR kodunu daha kolay algılanabilir hale getirip getirmediğini kontrol eder.
Test edilen API'ler:
android.hardware.camera2.CameraExtensionCharacteristics#getSupportedExtensionsandroid.hardware.camera2.CameraExtensionSession#capture
Geçti: HDR uzantısı, QR kodunu algılamak için gereken kontrast değişikliklerinin sayısını azaltır veya QR kodundaki gradyanı azaltır.
scene_low_light
scene_low_light sahnesi, siyah arka plan üzerinde farklı gri tonlarında karelerden oluşan bir ızgaradan oluşuyor ve kareler kırmızı bir ana hatla çevreleniyor. Kareler, Hilbert eğrisi yönünde düzenlenir.
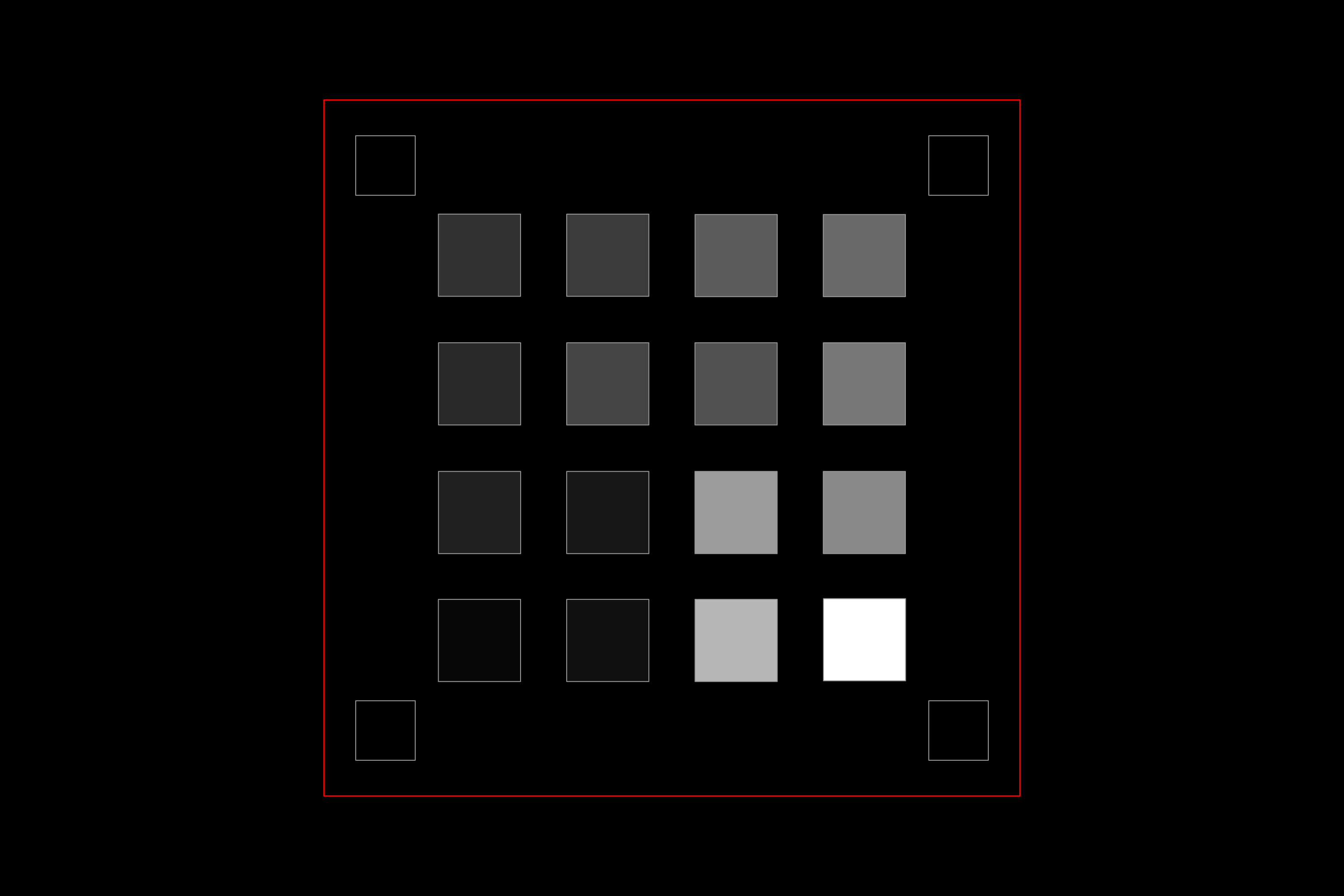
Şekil 136. scene_low_light örneği.
test_night_extension
Night extension'ı test eder. Uzantı etkin durumdayken yakalama işlemleri yapar ve aşağıdakileri gerçekleştirir:
- 20 karenin varlığını algılar
- Her kareyle sınırlanan parlaklığı hesaplar.
- Hilbert eğrisi ızgara yönüne göre ilk 6 karenin ortalama parlaklık değerini hesaplar.
- Ardışık karelerin parlaklık değerindeki farkı (örneğin, kare2 - kare1) 5. ve 6. karelere (kare6 - kare5) kadar hesaplar ve hesaplanan beş farkın ortalamasını bulur.
Android 16 veya daha yeni sürümleri çalıştıran cihazlarda, yakalama isteği, kareler ızgarasını sınırlayan dikdörtgene karşılık gelen ölçülü bir bölge içerir. Bu ekleme, eşik geçme ölçütlerini değiştirir.
Test edilen API'ler:
android.hardware.camera2.CameraExtensionCharacteristics#getSupportedExtensionsandroid.hardware.camera2.CameraExtensionSession#capture
Pass:
- Android 16 veya daha yeni sürümleri çalıştıran cihazlarda, ilk 6 karenin ortalama parlaklık değeri en az 80 olmalı ve 5. ile 6. kareye kadar olan ardışık karelerin parlaklık değerindeki ortalama fark en az 18, 75 olmalıdır.
- Android 15 ve önceki sürümlerin yüklü olduğu cihazlarda ilk 6 karenin ortalama parlaklık değeri en az 85 olmalı ve 5. ile 6. kareye kadar olan ardışık karelerin parlaklık değerindeki ortalama fark en az 17 olmalıdır.
Aşağıdaki parlaklık grafiğinde, başarılı bir test sonucunun nasıl göründüğü gösterilmektedir.
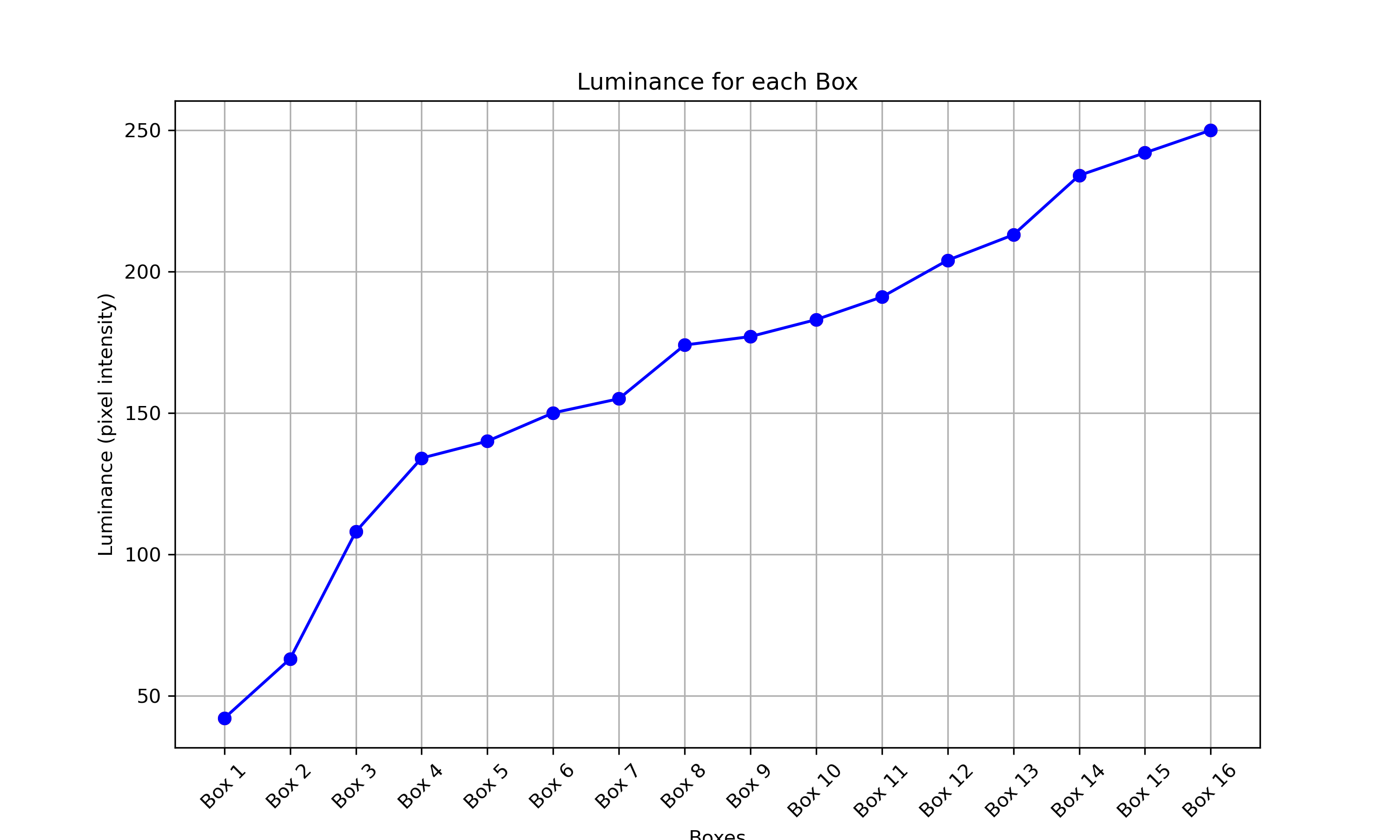
Şekil 137. Düşük ışıklı gece sahnesi testini geçen örnek.
test_low_light_boost_extension
Düşük ışıkta otomatik pozlama modunu test eder. Camera2, düşük ışık güçlendirmesi AE modunu destekliyorsa bu test Camera2 için yapılır. Gece modu kamera uzantısı destekleniyorsa ve uzantı düşük ışık güçlendirmesi AE modunu destekliyorsa bu test, gece modu kamera uzantısı için de gerçekleştirilir. Bu testte AE modu düşük ışıkta artırma olarak ayarlanır, önizlemeden bir kare alınır ve aşağıdakiler yapılır:
- 20 kutunun varlığını algılar
- Her kutuyla sınırlanan parlaklığı hesaplar.
- Hilbert eğrisi ızgara yönüne göre ilk 6 karenin ortalama parlaklık değerini hesaplar.
- Ardışık karelerin parlaklık değerindeki farkı (örneğin, kare2 - kare1) 5. ve 6. karelere (kare6 - kare5) kadar hesaplar ve hesaplanan beş farkın ortalamasını bulur.
Android 16 veya daha yeni sürümleri çalıştıran cihazlarda, yakalama isteği, kareler ızgarasını sınırlayan dikdörtgene karşılık gelen ölçülü bir bölge içerir. Bu ekleme, eşik geçme ölçütlerini değiştirir.
Test edilen API'ler:
android.hardware.camera2.CameraCharacteristics#CONTROL_AE_AVAILABLE_MODESandroid.hardware.camera2.CameraMetadata#CONTROL_AE_MODE_ON_LOW_LIGHT_BOOST_BRIGHTNESS_PRIORITYandroid.hardware.camera2.CameraExtensionCharacteristics#getSupportedExtensions
Pass:
Android 16 veya sonraki sürümlerin yüklü olduğu cihazlarda, ilk 6 karenin ortalama parlaklık değeri en az 54 olmalı ve 5. ile 6. kareye kadar olan ardışık karelerin ortalama parlaklık değeri farkı en az 17 olmalıdır.
Android 15 ve önceki sürümlerin yüklü olduğu cihazlarda ilk 6 karenin ortalama parlaklık değeri en az 70 olmalı ve 5. ile 6. kareye kadar olan ardışık karelerin parlaklık değerindeki ortalama fark en az 18 olmalıdır.
scene_tele
scene_tele testlerinin temel şartı, grafik mesafesinin en az telefoto lensin minimum odak mesafesi olmasıdır. Bu minimum odak mesafesi cihazlar arasında farklılık gösterebileceğinden kurulumunuzu belirli telefoto kameraya uygun şekilde yapılandırmanız gerekir.
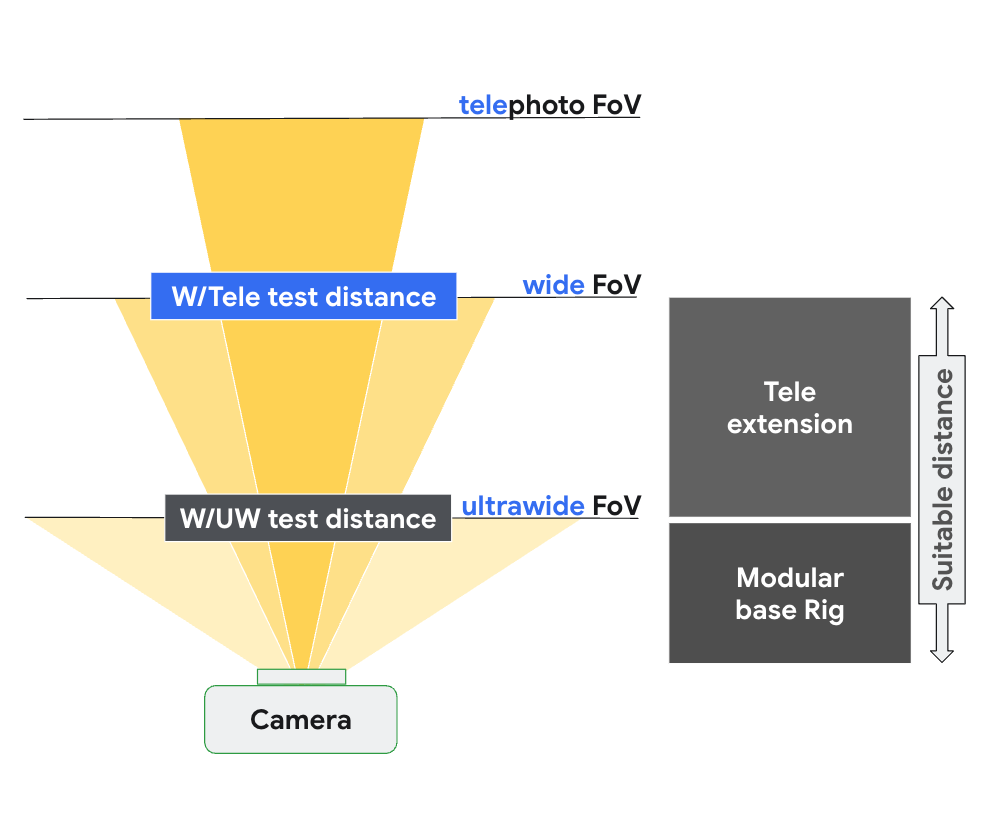
Şekil 138. Geniş ve telefoto kameranın odak mesafesine göre scene_tele kurulumu.
Test donanımı kurulumu hakkında daha fazla bilgi için Tele uzatma düzeneği kurulumu başlıklı makaleyi inceleyin.
scene6_tele
scene6_tele sahnesi, beyaz arka plan üzerinde bir ArUco işaretçileri ızgarasından oluşuyor.
scene6_tele çekimler modüler kamera düzeneğinde aşırı pozlanmış görünüyorsa modüler kamera düzeneğinin ön plakasını çıkarın.
WFoV test düzeneğinin bağlantısını uzantıdan kesin ve telefon montajını çıkarın.

Şekil 139. WFoV test düzeneğinin bağlantısını uzantıdan kesin ve telefon montajını çıkarın.
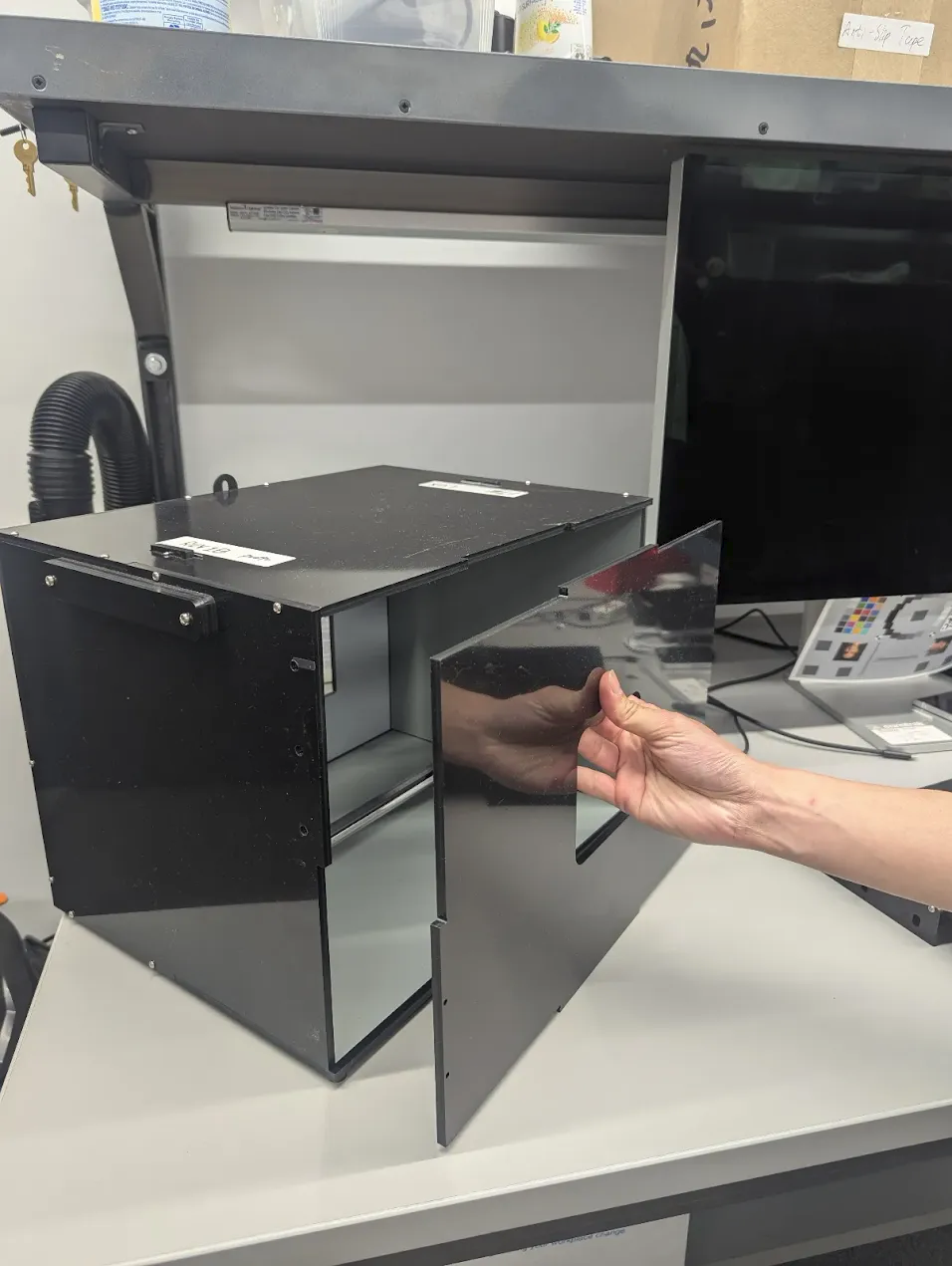
Şekil 140. Ön plakayı çıkarın.
test_zoom_tele
Geniş lensden telefoto lense geçişte kamera yakınlaştırma davranışını test eder. Test, test_zoom ile aynıdır ancak geniş lensten telefoto lense geçişte kamera yakınlaştırma davranışını test eder.
Test edilen API'ler:
android.hardware.camera2.CameraCharacteristics#CONTROL_ZOOM_RATIO_RANGEandroid.hardware.camera2.CameraCharacteristics#LENS_INFO_AVAILABLE_FOCAL_LENGTHSandroid.hardware.camera2.CaptureRequest#CONTROL_ZOOM_RATIOandroid.hardware.camera2.CaptureResult#LENS_FOCAL_LENGTH
Geçti: Kameranın doğru şekilde yakınlaştırdığını doğrulamak için yakalanan ArUco işaretçisinin göreli boyutu, istenen yakınlaştırma oranıyla karşılaştırıldığında doğru olmalı ve işaretçi ile görüntü merkezi arasındaki mesafe, test_zoom bölümünde listelenen ölçütlere göre değişmelidir.
test_preview_zoom_tele
Geniş lensten telefoto lense geçişte önizleme kareleri için kamera yakınlaştırma davranışını test eder. Test, test_preview_zoom ile aynıdır ancak geniş lensden telefoto lense geçişte önizleme kareleri için kamera yakınlaştırma davranışını test eder.
Test edilen API'ler:
android.hardware.camera2.CameraCharacteristics#CONTROL_ZOOM_RATIO_RANGEandroid.hardware.camera2.CameraCharacteristics#LENS_INFO_AVAILABLE_FOCAL_LENGTHSandroid.hardware.camera2.CaptureRequest#CONTROL_ZOOM_RATIOandroid.hardware.camera2.CaptureResult#LENS_FOCAL_LENGTH
Geçti: Kameranın doğru şekilde yakınlaştırdığını doğrulamak için yakalanan ArUco işaretçisinin göreceli boyutu, istenen yakınlaştırma oranıyla karşılaştırıldığında doğrudur ve işaretçi ile görüntü merkezi arasındaki mesafe, test_preview_zoom'da listelenen ölçütlere göre değişir.
scene7_tele
scene7_tele, scene7 ile aynıdır ancak telefoto lens testi için ayarlanmıştır. Dört eşit çeyreğe bölünmüş, her biri farklı bir renkle doldurulmuş dikdörtgen bir çerçevedir. Dikdörtgenin ortasında, keskinlik kontrolleri için eğimli kenarlı bir grafik yer alır. Dört ArUco işaretleyici, dikdörtgenin dört dış köşesiyle hizalanarak farklı yakınlaştırma oranlarında ana dikdörtgen çerçevesinin doğru koordinatlarının elde edilmesine yardımcı olur.
test_multi_camera_switch_tele
Bu test, farklı yakınlaştırma oranlarında önizleme kaydı sırasında geniş (W) ve telefoto (tele) lensler arasında geçiş yapıldığında benzer RGB değerleri elde edildiğini doğrular.
Test, dinamik önizleme kaydı yapmak ve fiziksel kameranın değiştiği noktayı belirlemek için önceden tanımlanmış aralıkta farklı yakınlaştırma oranları kullanır. Bu nokta, geniş açıdan telefoto lense geçişi gösterir.
Çapraz geçiş noktasında ve öncesinde çekilen kareler AE, AWB ve AF için analiz edilir.
AE kontrolü, parlaklık değişikliğinin hem geniş hem de telefoto lens görüntüleri için beklenen aralıkta olduğunu doğrular. AWB kontrolü, kırmızı-yeşil ve mavi-yeşil oranlarının hem W hem de telefoto lens görüntüleri için eşik değerleri içinde olduğunu doğrular. AF kontrolü, W ve telefoto lens görüntüleri arasındaki ortalama gradyan büyüklüğüne göre netlik tahmini değerini değerlendirir.
Test edilen API'ler:
android.hardware.camera2.CameraCharacteristics#CONTROL_ZOOM_RATIO_RANGEandroid.hardware.camera2.CaptureRequest#CONTROL_ZOOM_RATIOandroid.media.CamcorderProfileandroid.media.MediaRecorder
Geçti: Testin başarılı olması için AE, AWB ve AF kontrollerinin tümü başarılı olmalıdır. Her kontrolün ölçütleri şunlardır:
- AE kontrolü: Geniş ve telefoto lens görüntüleri arasındaki parlaklık değişimi %4'ten az olmalıdır.
- AWB kontrolü: LAB renk alanında, geniş ve telefoto için kırmızı-yeşil ile mavi-yeşil arasındaki delta C değeri 10'u aşamaz.
- AF kontrolü: Tele lensin görüntü keskinliği, geniş açılı lensten daha yüksek olmalıdır.
scene_video
scene_video, beyaz bir arka plan üzerinde farklı kare hızlarında ileri geri hareket eden dört farklı renkli daireden oluşan bir video sahnesidir.
Şekil 141. scene_video örneği.
test_preview_frame_drop
İstenen önizleme kare hızının dinamik bir sahnede korunup korunmadığını test eder. Bu test, üçüncü taraf uygulamalarına açık olan tüm kameralarda çalışır.
Test edilen API'ler:
android.hardware.camera2.CameraCharacteristics#CONTROL_AE_AVAILABLE_TARGET_FPS_RANGESandroid.hardware.camera2.CameraCharacteristics#SCALER_AVAILABLE_STREAM_USE_CASESandroid.hardware.camera2.CaptureResult#CONTROL_AE_TARGET_FPS_RANGEandroid.media.CamcorderProfileandroid.media.MediaRecorder
Geçti: Önizleme kare hızı, istenen kare hızı aralığının maksimum değerindedir ve ardışık kareler arasındaki ortalama varyasyon, testte ayarlanan göreceli toleranstan daha düşüktür.
2. nesil kamera düzeneği / sensör füzyonuna dayalı test sahneleri
feature_combination
feature_combination testleri, birden fazla kamera özelliği aynı anda etkinleştirildiğinde özelliklerin doğru şekilde çalıştığını doğrular. Bu testlerde, sensör füzyonu sahnesinde kullanılan dama tahtası görüntüsü kullanılır.
test_feature_combination
Farklı akış kombinasyonları, video sabitleme modu, hedef FPS aralığı, 10 bit HDR video ve Ultra HDR'nin kamerada desteklenen tüm kombinasyonlarını test eder.
Android 16 ve sonraki sürümlerde test, desteklenen özelliklerin tüm kombinasyonlarını çalıştırır ve sonuçları bir proto dosyasına kaydeder. Hata onayları yalnızca isSessionConfigurationSupported'nın True döndürdüğü özellik kombinasyonları için çağrılır.
Test edilen API'ler:
android.hardware.camera2.CameraDevice.CameraDeviceSetup#isSessionConfigurationSupportedandroid.hardware.camera2.CameraDevice.CameraDeviceSetup#createCaptureRequest
Geçti: Desteklenen her özellik kombinasyonu için:
- Önizleme sabitleme özelliği açıksa önizleme akışı sabitlenir.
- Önizleme kare hızı, yapılandırılan
AE_TARGET_FPS_RANGEiçinde olmalıdır. - Kaydedilen önizleme yayınındaki renk alanı, ayarlanan renk alanıyla eşleşir.
- Ultra HDR çekiminde geçerli bir kazanç haritası var.
scene_flash
scene_flash testleri için sensör füzyon kutusunda karanlık bir sahne gerekir.
Android 17 ve sonraki sürümlerde scene_flash testi, 2. nesil test düzeneği kullanılarak yapılabilir.
test_auto_flash
Arka ve ön kameralarda otomatik flaşın karanlık bir sahnede tetiklendiği testler. Ön kameralarda otomatik flaş, sahneyi aydınlatmak için fiziksel bir flaş birimi yerine ekranı kullanır. Test, otomatik flaşın etkinleştirilmesiyle karo resminin ortasının daha parlak olduğunu kontrol ederek otomatik flaşın kullanıldığını doğrular. Otomatik flaşı tetiklemek için test düzeneğindeki ışıkların kapatılması gerekir. Işıklar, Arduino denetleyiciyle otomatik olarak kapatılabilir. Testin doğru çalışması için sahnenin tamamen karanlık olması gerekir. Testten önce cihaza Jetpack Camera App (JCA) yüklenmelidir. Arka kameralar için otomatik flaşın tetiklenmesi AE durumuna bağlıdır ancak ön kameralar için otomatik flaşın tetiklenmesi AE'ye bağlı değildir ve her zaman tetiklenir.
Android 17 ve sonraki sürümlerde, desteklenen tüm yakınlaştırma aralıklarında doğru işlevselliği doğrulamak için 1x olmayan yakınlaştırma seviyeleri test edilir.
Test edilen API'ler:
android.hardware.camera2.CameraCharacteristics#FLASH_INFO_AVAILABLEandroid.hardware.camera2.CaptureRequest#CONTROL_AE_MODEandroid.hardware.camera2.CaptureRequest#CONTROL_AE_PRECAPTURE_TRIGGERandroid.hardware.camera2.CaptureResult#CONTROL_AE_STATEandroid.hardware.camera2.CaptureRequest#FLASH_MODE
Geçti: Otomatik flaş etkin durumdayken karo resminin merkezi, tüm kameralar için orijinal sahne resminden daha parlaktır.
test_flash_strength
SINGLE modunda flaş gücü kontrolünün doğru şekilde uygulandığını test edin.
Cihazın, SINGLE modunda kamera kullanılırken flaş gücü kontrolünü destekleyip desteklemediğini doğrular. Destekliyorsa flaş gücü, istenen farklı güç seviyelerine göre değişir. Flaş gücü kontrolünün farklı AE_MODES ile çalıştığını doğrular.
Örneğin, otomatik pozlama modu ON veya OFF ise flaş gücü seviyesi parlaklığı etkiler. Mod ON_AUTO_FLASH ise flaş gücü seviyesinin parlaklık üzerinde etkisi olmaz.
Testi yapmak için test düzeneğindeki ışıklar kapatılmalıdır. Işıklar, Arduino denetleyicisiyle otomatik olarak kapatılabilir. Testin doğru çalışması için sahnenin tamamen karanlık olması gerekir.
Test edilen API'ler:
android.hardware.camera2.CameraCharacteristics#FLASH_INFO_STRENGTH_DEFAULT_LEVELandroid.hardware.camera2.CameraCharacteristics#FLASH_INFO_STRENGTH_MAXIMUM_LEVELandroid.hardware.camera2.CameraCharacteristics#FLASH_SINGLE_STRENGTH_DEFAULT_LEVELandroid.hardware.camera2.CameraCharacteristics#FLASH_SINGLE_STRENGTH_MAX_LEVEL
Pass:
Otomatik pozlama modu ON veya OFF olduğunda, flaş gücü seviyesi flaşsızdan FLASH_SINGLE_STRENGTH_MAX_LEVEL'e yükseldikçe görüntü yamalarının parlaklığı artar.
Otomatik pozlama modu ON_AUTO_FLASH olduğunda, flaş gücü seviyesi flaşsızdan FLASH_SINGLE_STRENGTH_MAX_LEVEL'ye yükselirken görüntü yamalarının parlaklık farkı tolerans dahilindedir.
test_led_snapshot
LED anlık görüntülerinin resmi doygunlaştırmadığını veya renklendirmediğini test eder.
Bu test, ışıkları kontrol etmek için Sensör Füzyon Kutusu'na bir aydınlatma denetleyicisi ekler. Işıklar OFF olarak ayarlanmışken test, AUTO_FLASH modu ON olarak ayarlanmış şekilde çekim yapar. Bu yakalama sırasında test, aePrecapture tetikleyicisi START olarak ayarlanmış bir ön yakalama dizisi çalıştırır ve yakalamayı flaşla yapmak için yakalama amacını Preview olarak ayarlar.
Çekimde flaştan kaynaklanan belirgin bir sıcak nokta olduğundan test, çekimin tamamının flaş görüntüsü ortalamasını hesaplar ve değerin (68, 102) aralığında olup olmadığını doğrular. Resmin beyaz dengesinin makul olup olmadığını kontrol etmek için kırmızı-yeşil ve mavi-yeşil oranları hesaplanır ve bu oranların 0,95 ile 1,05 arasında olup olmadığı doğrulanır.
Test edilen API'ler:
android.hardware.camera2.CameraCharacteristics#FLASH_INFO_AVAILABLEandroid.hardware.camera2.CaptureRequest#CONTROL_AE_MODEandroid.hardware.camera2.CaptureRequest#FLASH_MODE
Geçti: Kırmızı-yeşil ve mavi-yeşil oranları 0,95 ile 1,05 arasındadır. Flaş görüntüsünün ortalaması (68, 102) aralığında olmalıdır.
test_night_mode_indicator
Gece modu göstergesinin işlevselliğini test eder. Bu özellik, kameranın düşük ışık koşullarında çalışıp çalışmadığını ve Gece Modu Kamera uzantısı ile çekilen fotoğraflardan yararlanıp yararlanmayacağını gösterir. Bu özellik yalnızca Gece Modu Kamera uzantılarını destekleyen cihazlarda kullanılabilir.
Bu test, gece modu göstergesinin kamera önizlemesi sırasında ışık koşullarını doğru şekilde yansıttığını kontrol eder. Testte aşağıdaki adımlar uygulanır:
- Başlatma: Test,
ItsSessionbaşlatır ve kamera özelliklerini alır. Ayrıca aydınlatma denetleyicisiyle bağlantı kurar. - Atlama Koşulları: Cihaz, gerekli API düzeyini veya gece modu göstergesi özelliğini desteklemiyorsa test atlanır.
- Camera2 Oturumu:
- Test,
Camera2oturumunu kullanarak bir önizleme yakalama oturumu başlatır. - Işık açılır ve önizleme karesi yakalanır.
- Test, gece modu göstergesinin
OFFdurumunda olduğunu doğrular. - Işık kapatılır ve bir önizleme karesi yakalanır.
- Test, gece modu göstergesinin
ONdurumunda olduğunu doğrular.
- Test,
- Kamera uzantısı oturumu:
- Test,
Camera2oturumundakiyle aynı prosedürü tekrarlar ancakEXTENSION_NIGHTuzantısıylaCameraExtensionoturumu kullanılır.
- Test,
- Temizleme: Test
ItsSessionkapanır ve aydınlatma denetleyicisi serbest bırakılır.
Test edilen API'ler:
Pass:
- Işık açıkken gece modu göstergesi
OFFdurumunda olmalıdır. - Işık kapalıyken gece modu göstergesi
ONdurumunda olmalıdır. - Hem
Camera2hem deCameraExtensionoturumları için geçerlidir.
test_preview_min_frame_rate
Önizleme kare hızının karanlık bir sahnede doğru şekilde azaldığını test eder. Bu testin doğru şekilde çalışması için test düzeneğindeki ışıkların kontrol cihazı tarafından veya test operatörü tarafından manuel olarak kapatılması gerekir.
Test edilen API'ler:
android.hardware.camera2.CameraCharacteristics#CONTROL_AE_AVAILABLE_TARGET_FPS_RANGESandroid.hardware.camera2.CameraCharacteristics#SCALER_AVAILABLE_STREAM_USE_CASESandroid.hardware.camera2.CaptureResult#CONTROL_AE_TARGET_FPS_RANGEandroid.media.CamcorderProfileandroid.media.MediaRecorder
Geçti: Önizleme kare hızı, istenen kare hızı aralığının minimum değerindedir ve kareler arasındaki varyasyon, testte belirlenen mutlak toleranstan daha azdır.
test_torch_strength
TORCH modunda flaş gücü kontrolünün doğru şekilde uygulandığını test edin.
Cihazın TORCH modunda kamera kullanılırken flaş gücü kontrolünü destekleyip desteklemediğini, destekliyorsa istenen farklı güç seviyelerine göre el feneri gücünün değişip değişmediğini doğrular. Flaş gücü kontrolünün farklı AE_MODES ile çalıştığını doğrular.
Örneğin, otomatik pozlama modu ON veya OFF ise flaş gücü seviyesi parlaklığı etkiler. Mod ON_AUTO_FLASH ise flaş gücü seviyesinin parlaklık üzerinde etkisi olmaz.
Video çekimini simüle ederek, patlama süresi boyunca el feneri gücünün aynı kaldığını doğrular. Testi yapmak için test düzeneğindeki ışıklar kapatılmalıdır. Işıklar, Arduino denetleyicisiyle otomatik olarak kapatılabilir. Testin doğru çalışması için sahnenin tamamen karanlık olması gerekir.
Test edilen API'ler:
android.hardware.camera2.CameraCharacteristics#FLASH_INFO_STRENGTH_DEFAULT_LEVELandroid.hardware.camera2.CameraCharacteristics#FLASH_INFO_STRENGTH_MAXIMUM_LEVELandroid.hardware.camera2.CameraCharacteristics#FLASH_TORCH_STRENGTH_DEFAULT_LEVELandroid.hardware.camera2.CameraCharacteristics#FLASH_TORCH_STRENGTH_MAX_LEVEL
Pass:
Otomatik pozlama modu ON veya OFF olduğunda, flaş gücü seviyesi flaşsızdan FLASH_TORCH_STRENGTH_MAX_LEVEL'e yükseldikçe patlama moduyla çekilen fotoğrafların parlaklığı artar.
Otomatik pozlama modu ON_AUTO_FLASH olduğunda, flaş gücü seviyesi flaşsızdan FLASH_TORCH_STRENGTH_MAX_LEVEL'a yükselirken seri çekim görüntülerinin parlaklık farkı tolerans dahilindedir.
scene_gen2_chart
Android 17 ve sonraki sürümlerde scene_gen2_chart, 2. nesil kağıt haritayı kullanır.
Bu test tablosu; yüz örnekleri, bir QR kodu, gri tonlamalı yamalar, bir Siemens yıldızı, bir renk tablosu ve eğik karelerden oluşur.
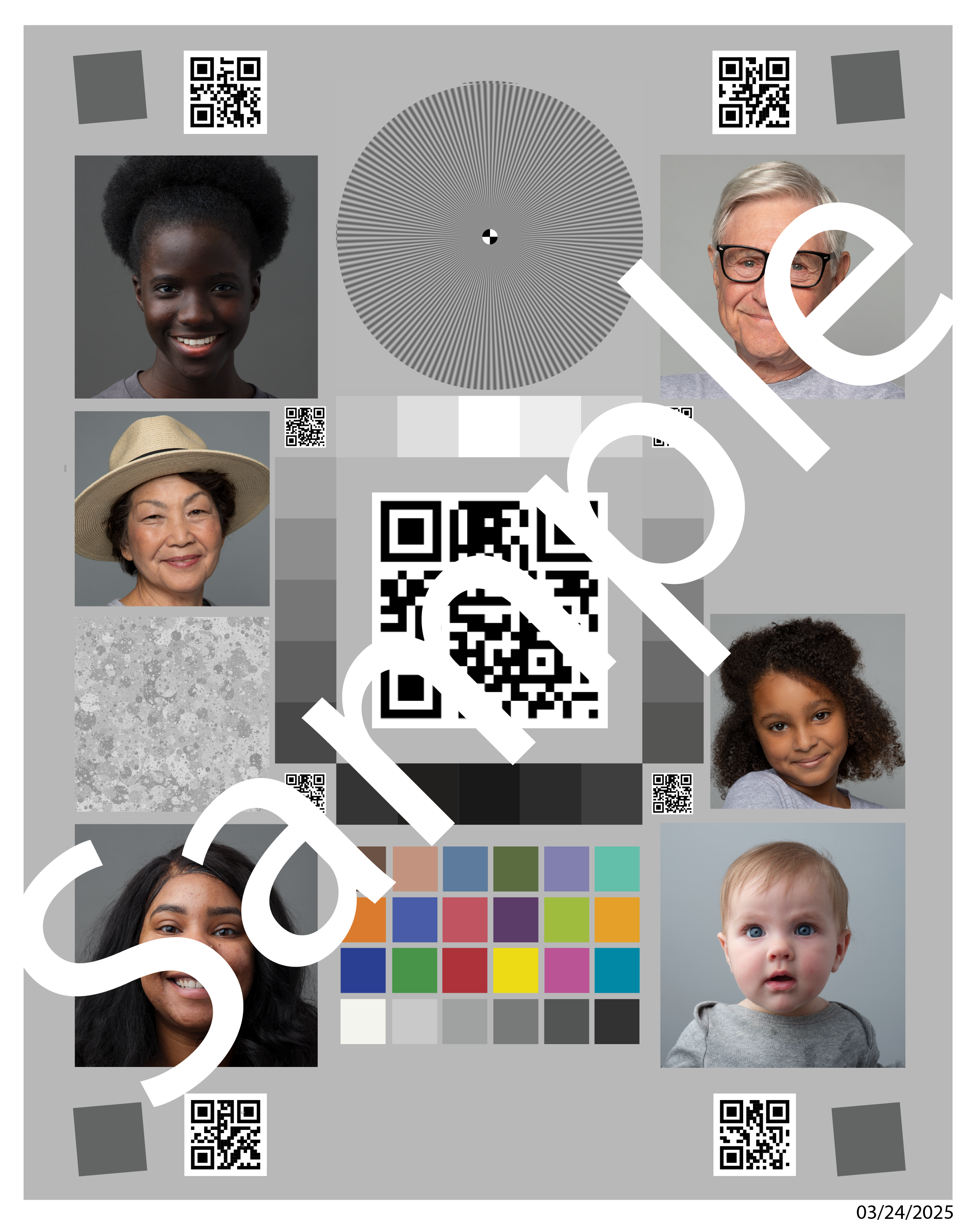
Şekil 142. 2. nesil grafik örneği.
test_tonemap_sequence
Bu testte, bir cihazın varsayılan ton haritası eğrisi doğrusal bir eğri ve iki üstel eğriyle (biri eşit aralıklı noktalara, diğeri eşit aralıklı olmayan noktalara sahip) karşılaştırılır. Başarılı bir sonuç için varsayılan eğrinin parlaklığı, doğrusal ve üstel eğrilerin parlaklığını aşmalıdır. Ayrıca, doğrusal eğri, üstel eğrilerden daha parlak olmalı ve iki üstel eğri benzer parlaklık seviyelerine sahip olmalıdır.
Test, cihazın varsayılan eğrisinin doğruluğunu da doğrular. Bu işlem, varsayılan eğrinin çıkarılması, yeniden girilmesi ve ardından elde edilen görüntünün parlaklığının orijinal varsayılan eğrinin görüntüsüyle karşılaştırılmasıyla yapılır.
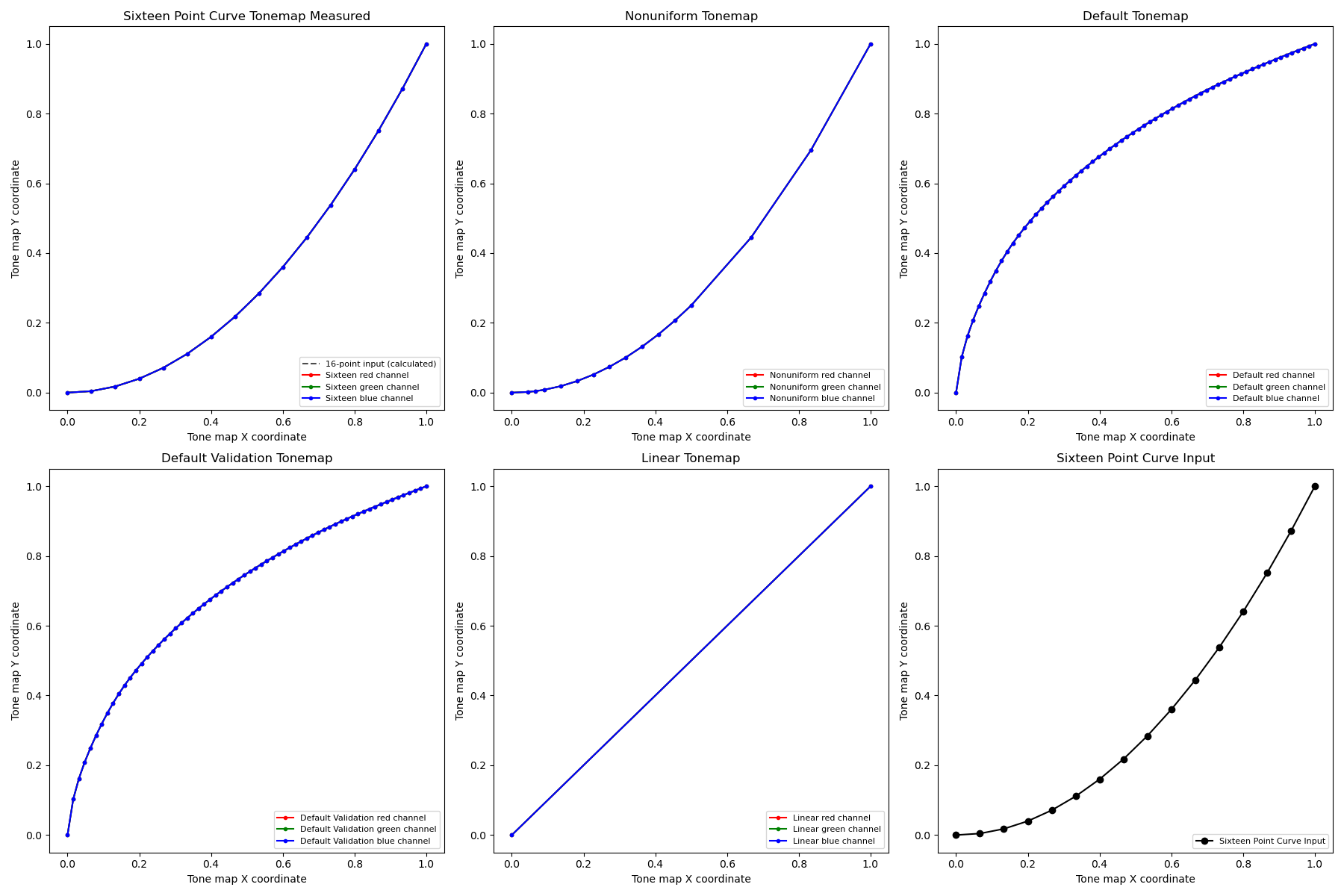
Şekil 143. Ton eşleme dizisi grafiğini test edin.
Test edilen API'ler:
android.hardware.camera2.CameraMetadata#TONEMAP_MODE_CONTRAST_CURVEandroid.hardware.camera2.CameraMetadata#TONEMAP_MODE_FASTandroid.hardware.camera2.CaptureRequest#TONEMAP_CURVEandroid.hardware.camera2.CaptureRequest#TONEMAP_MODE
Geçti: Varsayılan ve doğrusal eğriler arasındaki parlaklık farkı %15'ten fazla, iki üstel eğri arasındaki fark ise %8'den az.
test_multi_camera_switch
Bu test, dinamik yakınlaştırma geçişleri sırasında renk ve pozlama tutarlılığını doğrular. Önizleme kaydı sırasında Ultra Geniş (UW) ve Geniş (W) lensler arasında geçiş yapmanın neredeyse aynı CIELAB değerlerini koruduğunu doğrulayarak kullanıcı deneyiminde görünür değişiklikleri önler.
Test, ultra geniş lensin geniş lense geçtiği fiziksel kamera "geçiş" noktasını tetiklemek için önceden tanımlanmış bir yakınlaştırma aralığında dinamik bir önizleme kaydı gerçekleştirir. Test, lens geçişinin gerçekleştiği tam kareyi tanımlar. Bu geçiş noktasından hemen önce ve sonra gelen kareler, otomatik pozlama (AE) ve otomatik beyaz dengesinde (AWB) kararlılık için yakalanır ve analiz edilir.
AE kontrolü, lens geçişi sırasında parlaklık dalgalanmalarının kabul edilebilir bir aralıkta kaldığını onaylar. AWB kontrolü, kırmızı-yeşil ve mavi-yeşil oranlarının tanımlanmış renk nötrlüğü eşiklerinin içinde kalmasını sağlar.
Test edilen API'ler:
android.hardware.camera2.CameraCharacteristics#CONTROL_ZOOM_RATIO_RANGEandroid.hardware.camera2.CaptureRequest#CONTROL_ZOOM_RATIOandroid.media.CamcorderProfileandroid.media.MediaRecorder
Geçti: Testin başarılı olması için aşağıdaki AE ve AWB kontrollerinin başarılı olması gerekir:
- AE kontrolü: Cihaz hem
ae_regionshem deawb_regionsdeğerini destekliyorsa UW ve W lens görüntüleri arasındaki parlaklık değişimi (Y değeri), tüm renk yamaları için% 4'ten az olmalıdır. Yalnızcaae_regionsdestekleniyorsa yalnızca gri renk yaması değerleri ölçütleri karşılamalıdır. - AWB kontrolü: Cihaz hem
ae_regionshem deawb_regionsdeğerini destekliyorsa UW ve W lens görüntülerinin kırmızı-yeşil ve mavi-yeşil değerleri arasındaki fark, gri renk yaması için% 3'ten, diğer renk yamaları için ise% 10'dan az olmalıdır.

Şekil 144. UW lensiyle çekilmiş gri yama.

Şekil 145. W lensiyle çekilmiş gri yama.
scene_ip
Android 16 ve sonraki sürümlerde, sahne scene_ip, çekilen görüntüler arasındaki büyük farklılıkları belirlemek için varsayılan kamera uygulaması ile Jetpack kamera uygulaması (JCA) arasında görüntü eşliği kontrolleri yapılmasını sağlar. JCA, sosyal medya uygulaması yakalamalarını kopyalar ve sosyal medya uygulamalarının daha sonra işleyip iyileştirdiği bir temel görüntü sağlar.
Donanım kurulumu koşulları
scene_ip testleri için aşağıdaki donanım kurulumu gereklidir:
- Testler, Gen2 kamera ITS-in-a-box'ta yürütülür.
- 2. nesil düzeneğin parçası olan aydınlatma ve servo denetleyiciler, test ortamını kontrol etmek için kullanılır.
- 2. nesil rig'in içine bir test özelliği grafiği yerleştirilir.

Şekil 146. Gen2chart_sample örneği.
Test atlama ölçütleri
Aşağıdaki ölçütlerden herhangi biri karşılanırsa scene_ip testleri atlanır:
- Cihazın ilk API düzeyi (
first_api_level) 35 veya daha düşüktür. - Cihaz, ön ve arka birincil kamera cihazlarına sahip bir telefon cihazı değildir (ör. tablet veya TV).
test_default_jca_ip
Varsayılan kamera uygulaması ve JCA kullanılarak kontrollü ışık koşullarında test özelliği grafiğinin çekimlerini yapar ve aşağıdaki kontrolleri gerçekleştirir:
Görüş alanı: Varsayılan kamera uygulaması ve JCA çekimlerinin aynı görüş alanına sahip olup olmadığını kontrol eder. Bu kontrol, yakalanan grafik görüntüsünden çıkarılan merkezdeki QR kodu özelliğini kullanır.
Parlaklık: Varsayılan kamera uygulaması ile JCA arasında ölçülen parlaklık farkının 10'u aşmadığını kontrol eder. Bu kontrol, parlaklık ölçümü için dinamik aralık yamasını kullanır.
Beyaz dengesi: Varsayılan kamera uygulaması ile JCA arasındaki beyaz dengesi farkının 4'ü aşmadığını kontrol eder. Bu kontrol, parlaklık ölçümü için dinamik aralık yamasını kullanır.
Renk oluşturma: Varsayılan kamera uygulaması ile JCA arasındaki renk oluşturma farkının 6'yı aşmadığını kontrol eder.
Geçti: Test, görüş alanı, parlaklık ve beyaz dengesi kontrollerini geçiyor. Android 16'da bu test zorunlu değildir (NOT_YET_MANDATED). Android 17 ve sonraki sürümlerde FoV, parlaklık ve beyaz dengesi eşliği kontrolleri zorunludur. Android 17'de renk oluşturma kontrolü zorunlu değildir
(NOT_YET_MANDATED).
test_jca_jpegr_ip
JPEG_R JCA önizlemesi ve çekilen görüntüler arasındaki beyaz dengesi farkının 4'ü aşmadığını doğrular.
Test edilen API'ler:
Geçti: JCA önizleme anlık görüntüsü ile çekilen JPEG_R görüntüsü arasındaki beyaz dengesi farkı eşik değerinin (varsayılan değer 4) içinde.
sensor_fusion
Sensör füzyonu testleri için telefonun dama deseni ve ArUco işaretlerinin önünde belirli bir şekilde hareket ettirilmesi gerekir. En iyi sonuçlar için test çizelgesinin düz bir şekilde yerleştirildiğini doğrulayın. Düz olmayan grafikler, testlerin birçoğunun döndürme hesaplamalarını etkiler. Grafik, 17x17 inç boyutunda yazdırılarak sensör füzyonu kutusunun arkasını doldurmalıdır. (43x43 cm). sensor_fusion testleri, Sensor Fusion Box ile otomatikleştirilebilir.
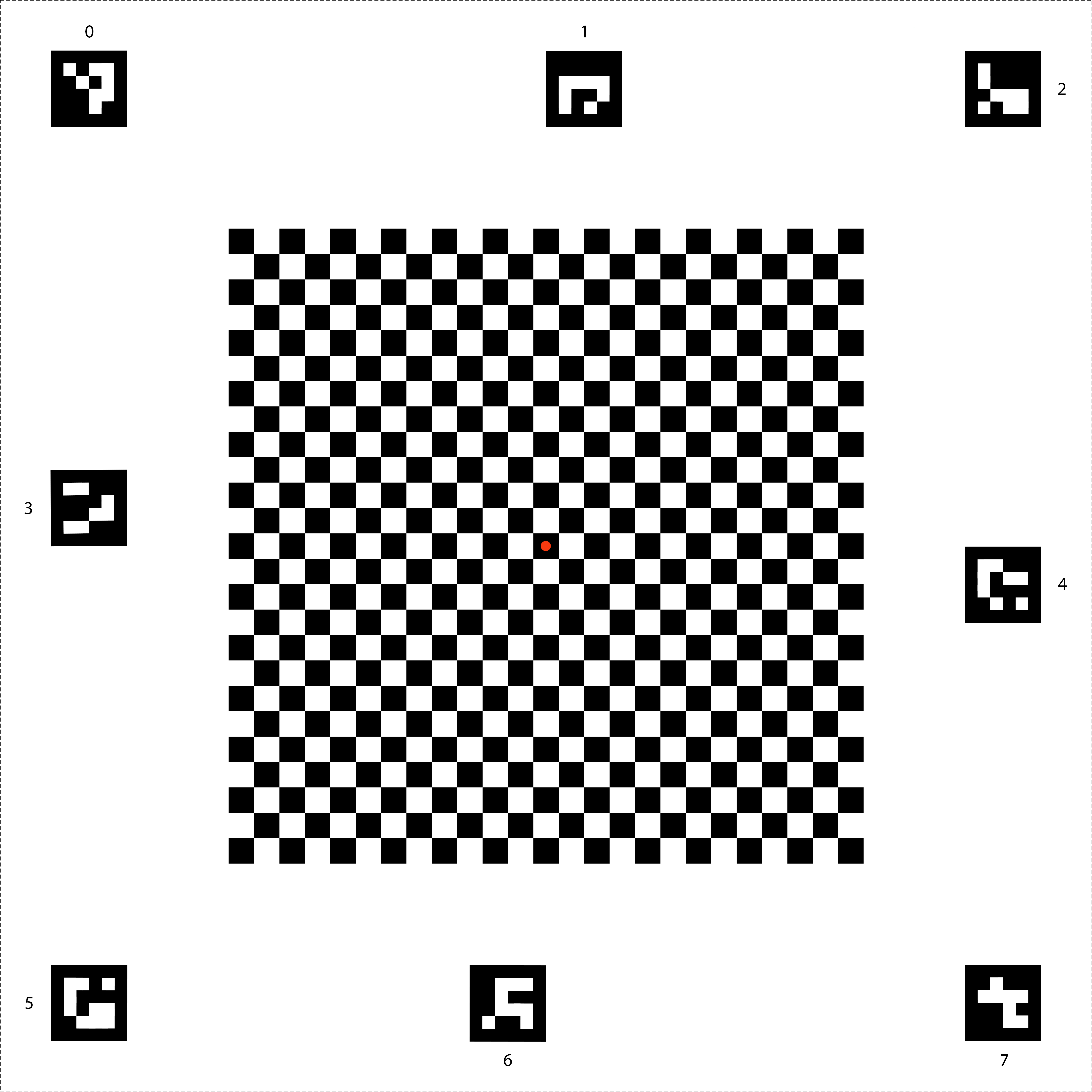
Şekil 147. Sensör birleştirme grafiği.
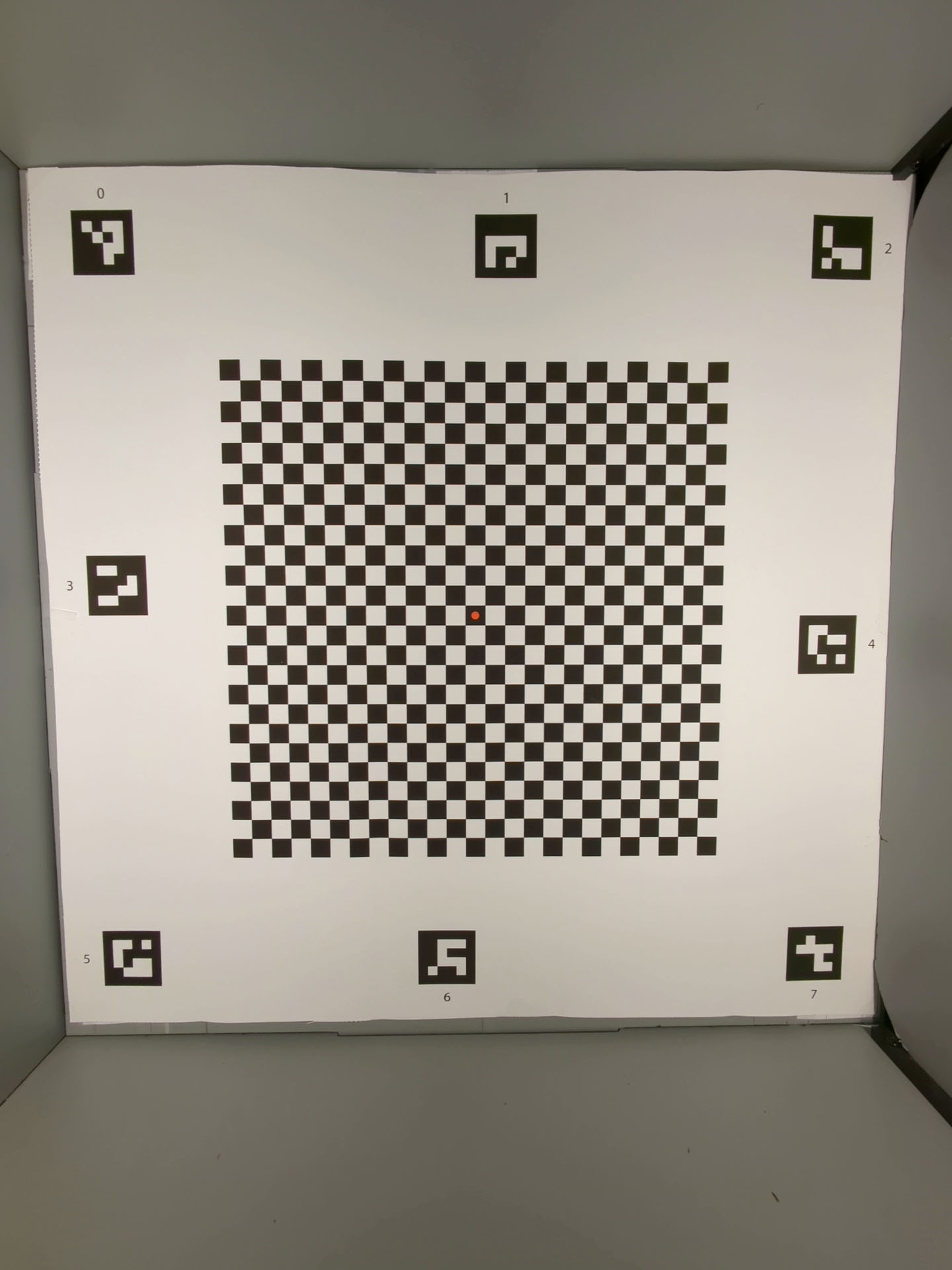
Şekil 148. Sensör füzyon kutusunun arkasını dolduran sensör füzyon grafiği.
test_lens_intrinsic_calibration
Optik görüntü sabitleme (OIS) nedeniyle mercek hareket ettiğinde merceğin doğal optik merkezinin değişip değişmediğini test eder. Lensin içsel örnekleri destekleniyorsa lensin optik merkezi, OIS nedeniyle lens hareket ettiğinde değiştiği için testler yapılır.
Test edilen API'ler:
android.hardware.camera2.CameraCharacteristics#LENS_INTRINSIC_CALIBRATIONandroid.media.MediaRecorderandroid.media.CamcorderProfile
Geçti: Merceğin optik merkezi 1 piksel veya daha fazla değişiyor. Lensin içsel örnekleri destekleniyorsa lensin içsel örneklerinin optik merkezleri 1 piksel veya daha fazla değişir.
Aşağıdaki şekil, her kare için piksel cinsinden ana noktalardaki değişiklikleri gösteren bir test_lens_intrinsic_calibration grafiği örneğidir:
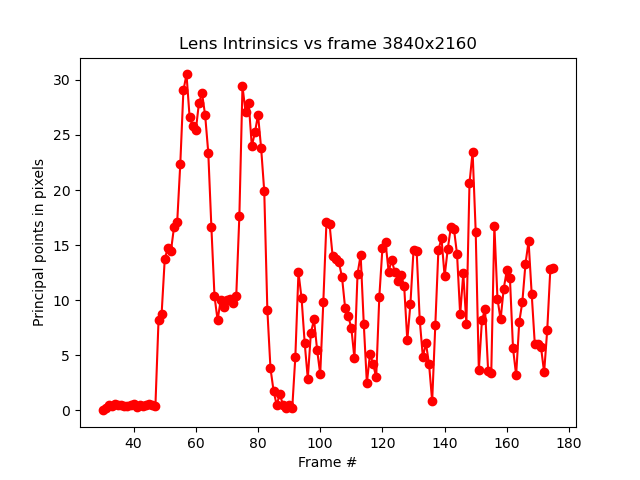
Şekil 149. Her bir kare için piksellerdeki temel noktaların değişikliklerini gösteren test_lens_intrinsic_calibration grafiği örneği.
test_multi_camera_frame_sync
Zaman damgasını belirlemek için dama tahtasındaki karelerin açılarını hesaplayarak mantıksal kamera tarafından yakalanan kare zaman damgalarının 10 ms içinde olduğunu doğrulayan testler.
Test edilen API'ler:
android.hardware.camera2.CameraCharacteristics#LOGICAL_MULTI_CAMERA_SENSOR_SYNC_TYPEandroid.hardware.camera2.CameraCharacteristics#getPhysicalCameraIds()android.hardware.camera2.CameraMetadata#REQUEST_AVAILABLE_CAPABILITIES_LOGICAL_MULTI_CAMERAandroid.hardware.camera2.params.OutputConfiguration#setPhysicalCameraId()
Geçti: Telefon döndürülürken her kameranın çektiği resimler arasındaki açı önemli ölçüde değişmiyor.
test_preview_distortion
Çeşitli yakınlaştırma seviyelerinde çekilen her önizleme karesinde bozulmanın düzeltildiğini test eder. Test, her önizleme karesi için ideal noktaları kameranın iç ve dış parametrelerine göre hesaplar.
Örnek resimde, ideal noktalar yeşil, gerçek noktalar ise kırmızı renkte gösterilmiştir. Bozulma hatası, gerçek noktalar ile ideal noktalar arasındaki RMS piksel mesafesine göre hesaplanır. Resimdeki yeşil ve kırmızı vurgular, bozulma hatasının bulunduğu alanı görsel olarak tespit etmek için kullanılır.
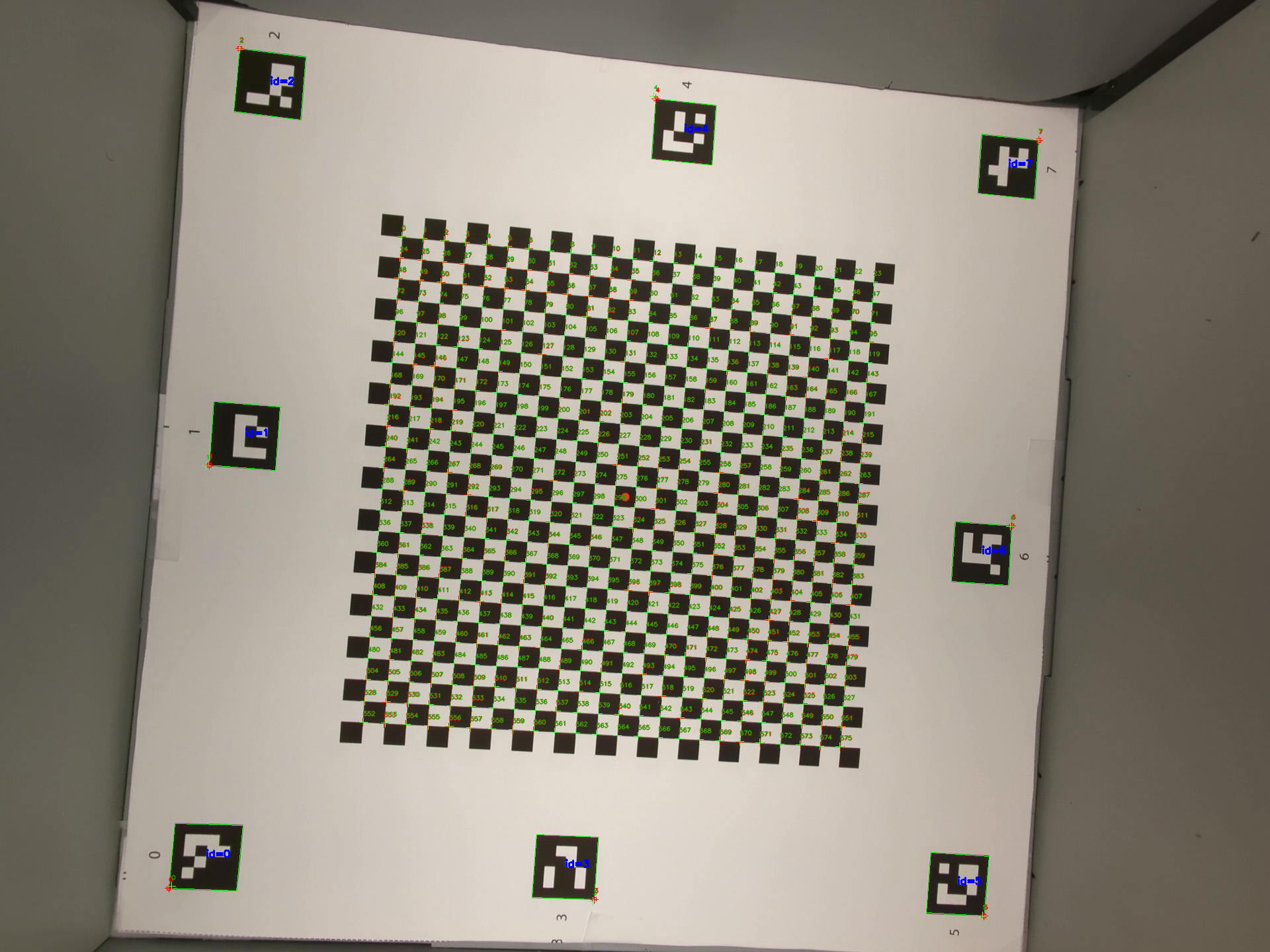
Şekil 150. İdeal noktaları yeşil, gerçek noktaları kırmızı olarak gösteren dama tahtası resmi.
Test edilen API'ler:
android.hardware.camera2.CameraCharacteristics#CONTROL_ZOOM_RATIO_RANGEandroid.hardware.camera2.CaptureRequest#CONTROL_ZOOM_RATIOandroid.hardware.camera2.CameraCharacteristics#getPhysicalCameraIds()android.media.CamcorderProfileandroid.media.MediaRecorder
Geçti: Her önizleme karesinin normalleştirilmiş bozulma hatası, testte belirlenen eşikten düşüktür.
test_preview_stabilization
Önizleme videosunu dengeleyen testler, jiroskopla daha az döner.
Test edilen API'ler:
android.hardware.camera2.CameraCharacteristics#SCALER_AVAILABLE_STREAM_USE_CASESandroid.media.MediaRecorderandroid.media.CamcorderProfile
Geçti: Kareler üzerindeki maksimum açı dönüşü, jiroskop dönüşünün% 70'inden azdır.
Aşağıda, sabitleme özelliği kullanılan ve kullanılmayan örnek videolar yer almaktadır:
Şekil 151. Sabitleme özelliğinin kullanıldığı örnek video.
Şekil 152. Sabitleme uygulanmamış örnek video.
test_sensor_fusion
AR ve VR uygulamaları için kamera ile jiroskop arasındaki zaman damgası farkını test eder. Telefon, dama deseninin önünde 10 kez 90 derece döndürülür. Hareket, gidiş dönüş yaklaşık 2 saniye sürüyor. Jiroskop yoksa veya zaman damgası kaynağı REALTIME parametresi etkin değilse bu test atlanır.
test_sensor_fusion testi, bir dizi grafik oluşturur. Hata ayıklama için en önemli iki grafik şunlardır:
test_sensor_fusion_gyro_events: Test sırasında telefonun jiroskop etkinliklerini gösterir. X ve Y yönündeki hareket, telefonun montaj plakasına güvenli bir şekilde monte edilmediği anlamına gelir. Bu da testin geçme olasılığını azaltır. Grafikteki döngü sayısı, kareleri kaydetmek için gereken yazma hızına bağlıdır.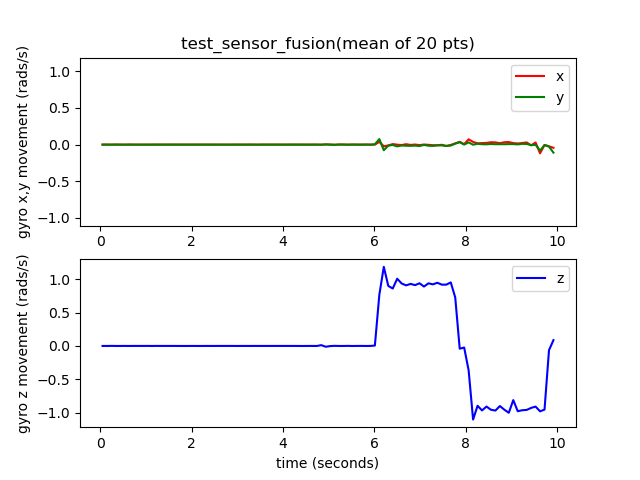
Şekil 153. test_sensor_fusion jiroskop etkinlikleri örneği.
test_sensor_fusion_plot_rotations: Jiroskop ve kamera etkinliklerinin hizalamasını gösterir. Bu grafik, kamera ile jiroskop arasında +/- 1 ms'lik eşleşen hareketi göstermelidir.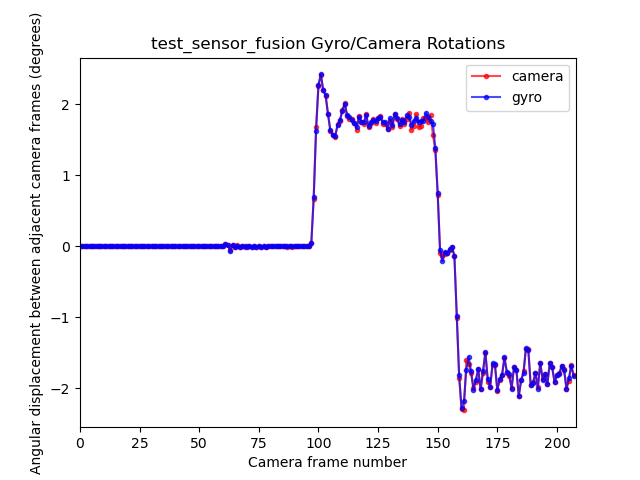
Şekil 154. test_sensor_fusion grafiği döndürme örneği.
Test edilen API'ler:
android.hardware.camera2.CameraCharacteristics#LENS_FACINGandroid.hardware.camera2.CameraCharacteristics#SENSOR_INFO_TIMESTAMP_SOURCEandroid.hardware.camera2.CameraMetadata#SENSOR_INFO_TIMESTAMP_SOURCE_REALTIMEandroid.hardware.camera2.CaptureRequest#CONTROL_AE_TARGET_FPS_RANGEandroid.hardware.camera2.CaptureRequest#SENSOR_FRAME_DURATIONandroid.hardware.camera2.CaptureResult#SENSOR_TIMESTAMPandroid.hardware.camera2.CaptureResult#SENSOR_ROLLING_SHUTTER_SKEW
Geçti: CDD'deki 7.3.9 Yüksek Doğrulukta Sensörler bölümüne göre kamera ve jiroskop zaman damgalarının farkı 1 ms'den az.
Hata mekanizmaları:
- Ofset hatası: Kamera-jiroskop ofseti +/- 1 ms içinde doğru şekilde kalibre edilmemiş.
- Kare düşmeleri: İşlem hattı, 200 kareyi art arda yakalayacak kadar hızlı değil.
- Soket hataları:
adb, testi yürütecek kadar uzun süre boyunca DUT'a güvenilir bir şekilde bağlanamıyor. - Grafik düz bir şekilde monte edilmemiş. Grafik
test_sensor_fusion_plot_rotationsdüz olmayan grafik bölümlerinde kamera dönerken jiroskop ve kamera dönüşünün önemli ölçüde değiştiği kareler içeriyor. - Kamera düz bir şekilde monte edilmemiş. Grafik
test_sensor_fusion_gyro_eventsX ve Y düzlemlerindeki hareketi gösterir. Arka kamera genellikle telefon gövdesinin geri kalanından daha yüksek bir çıkıntıya sahip olduğundan ve telefonun arkasını montaj plakasına takarken eğime neden olduğundan bu arıza ön kameralarda daha yaygındır.
test_video_stabilization
Destek sonlandırıldı: Bu testin Android 17'den itibaren desteği sonlandırıldı. Android 17 ve sonraki sürümlerde bu testin yerini test_video_stabilization_jca alır.
Videoyu dengeleyen testler, jiroskopun döndürdüğünden daha az döndürür.
Test edilen API'ler:
android.hardware.camera2.CameraCharacteristics#SCALER_AVAILABLE_STREAM_USE_CASESandroid.media.MediaRecorderandroid.media.CamcorderProfile
Geçti: Kareler üzerindeki maksimum açı dönüşü, jiroskop dönüşünün% 60'ından az.
Aşağıda, sabitleme özelliği etkin ve devre dışı bırakılmış örnek videolar yer almaktadır.
Şekil 155. Sabitleme özelliğinin kullanıldığı örnek video.
Şekil 156. Sabitleme uygulanmamış örnek video.
test_video_stabilization_jca
JCA kullanılarak çekilen ve videoyu sabitleyen testlerde, jiroskop daha az dönüyor. JCA, testten önce cihaza yüklenmelidir.
Test edilen API'ler:
android.hardware.camera2.CameraCharacteristics#SCALER_AVAILABLE_STREAM_USE_CASESandroid.media.CamcorderProfileandroid.media.MediaRecorder
Geçti: JCA kullanılarak çekilen videodan çıkarılan karelerdeki maksimum açı dönüşü, jiroskop dönüşlerinin% 70'inden azdır (4).
Difüzör tabanlı test sahnesi
scene5
scene5 için eşit şekilde aydınlatılmış gri bir sahne gerekir. Bu, kamera merceğinin üzerine yerleştirilen bir difüzörle sağlanır. Aşağıdaki difüzörü kullanmanızı öneririz:
http://www.edmundoptics.com/optics/windows-diffusers/optical-diffusers/opal-diffusing-glass/46168/.
Sahneyi hazırlamak için kameranın önüne bir difüzör takın ve kamerayı yaklaşık 2.000 lüks bir ışık kaynağına doğru tutun. scene5 için çekilen görüntülerde belirgin özelliklerin olmadığı dağınık bir ışıklandırma gerekir. Aşağıda örnek bir resim verilmiştir:
Şekil 157. scene5 yakalama örneği.
Bu sahne için tablet veya kumanda gerekmediğinden testlerde TEST_BED_MANUAL test yatağı kullanılır. Örnek için Manual testing config.yml file (Manuel test yapılandırması config.yml dosyası) başlıklı makaleye bakın.
Varsayılan config.yml dosyası TEST_BED_MANUAL içermez ancak dosyayı değiştirerek bu öğeyi ekleyebilirsiniz.
test_lens_shading_and_color_uniformity
Lens gölgelendirme düzeltmesinin uygun şekilde uygulandığını ve tek renkli düzgün bir sahnenin renginin eşit şekilde dağıtıldığını test eder. Bu testi, otomatik 3A ile bir YUV çerçevesinde gerçekleştirir. Lens gölgelendirmesi, y kanalına göre değerlendirilir. Belirtilen her örnek blok için ortalama y değerini ölçer ve merkez y değeriyle karşılaştırarak başarılı veya başarısız olduğunu belirler. Renk tekdüzeliği testi, kırmızı-yeşil ve mavi-yeşil alanında değerlendirilir.
Test edilen API'ler:
android.hardware.camera2.CaptureRequest#CONTROL_AE_MODEandroid.hardware.camera2.CaptureRequest#CONTROL_AWB_MODE
Geçti: Testin geçmesi için resmin belirtilen yarıçapında kırmızı-yeşil ve mavi-yeşil değerinin varyansı% 20'den az olmalıdır.
Hata mekanizmaları:
- Resimlerde aşırı vinyet efekti
- Resimlerde siyah kenarlıklar

Şekil 158. test_lens_shading_and_color_uniformity_y_plane.

Şekil 159. test_lens_shading_and_color_uniformity_color_uniformity.

Şekil 160. test_lens_shading_and_color_uniformity_lens_shading_result.
Geniş renk gamına sahip tablet tabanlı test sahnesi
scene_wide_gamut
scene_wide_gamut, dört eşit çeyreğe bölünmüş dikdörtgen bir çerçevedir ve her çeyrek farklı bir renkle doldurulur. Bunun için tabletin grafiği geniş renk gamında göstermesi ve DUT'un ekranın geniş renk gamlı fotoğrafını çekmesi gerekir.
Bu testler, çekilen görüntünün doğru renk profiline ve renk aralığına uygun olduğunu doğrular.
test_display_p3
ColorSpaceProfiles API'yi kullanarak JPEG'de Display P3 yakalamayı test eder. Yakalanan JPEG'in başlığında uygun bir ICC profili olup olmadığını ve resmin, sRGB gamının dışındaki renklerin belirli bir yüzdesini içerip içermediğini test eder.
Test edilen API'ler:
android.hardware.camera2.params.ColorSpaceProfilesandroid.hardware.camera2.params.SessionConfiguration#setColorSpace
Geçti: JPEG, Display P3 ICC profili ve sRGB gamının dışında kalan renklerin %1'den fazlasını içeriyor.

Şekil 161. test_display_p3 örneği.