
W wersji Androida 12 wprowadzono szereg zmian w Camera ITS. Ta strona zawiera podsumowanie zmian, które można podzielić na 4 główne kategorie:
Refaktoryzacja do Pythona 3
W styczniu 2020 r. język Python 2.7 został wycofany, dlatego cała baza kodu Camera ITS została refaktoryzowana do Pythona 3. W Androidzie 12 wymagane są te wersje Pythona i biblioteki:
- Python 3.7.9 lub Python 3.7.10
- OpenCV 3.4.2
- Numpy 1.19.2
- Matplotlib 3.3.2
- Scipy 1.5.2
- pySerial 3.5
- Pillow 8.1.0
- PyYAML 5.3.1
Główny program uruchamiający testy, tools/run_all_tests.py, pozostaje taki sam jak w Androidzie 11 lub starszym i został refaktoryzowany do Pythona 3.
Wszystkie poszczególne testy zostały refaktoryzowane i korzystają z nowej klasy konfiguracji testu zdefiniowanej w tests/its_base_test.py. Większość nazw testów i funkcji pozostaje bez zmian.
W Androidzie 12 wszystkie poszczególne testy wczytują teraz swoje sceny. Wczytywanie sceny dla każdego testu wydłuża ogólny czas testu, ale umożliwia debugowanie poszczególnych testów.
Więcej informacji o zmianach w poszczególnych testach znajdziesz w sekcji Zmiany w testach.
Te moduły Pythona zostały refaktoryzowane ze zmianą nazwy:
pymodules/its/caps.py→utils/camera_properties_utils.pypymodules/its/cv2image.py→utils/opencv_processing_utils.pypymodules/its/device.py→utils/its_session_utils.pypymodules/its/error.py→utils/error_util.pypymodules/its/image.py→utils/image_processing_utils.pypymodules/its/objects.py→utils/capture_request_utils.pypymodules/its/target.py→utils/target_exposure_utils.pytools/hw.py→utils/sensor_fusion_utils.py
Wdrożenie platformy testowej Mobly
Mobly to platforma testowa oparta na Pythonie, która obsługuje przypadki testowe wymagające wielu urządzeń z niestandardowymi konfiguracjami sprzętowymi. Camera ITS korzysta z infrastruktury testowej Mobly, aby zapewnić lepszą kontrolę i rejestrowanie testów.
Camera ITS korzysta z infrastruktury testowej Mobly, aby zapewnić lepszą kontrolę i rejestrowanie testów. Mobly to platforma testowa oparta na Pythonie, która obsługuje przypadki testowe wymagające wielu urządzeń z niestandardowymi konfiguracjami sprzętowymi. Więcej informacji o Mobly znajdziesz na stronie google/mobly.
Pliki config.yml
W platformie Mobly możesz skonfigurować testowane urządzenie (DUT) i tablet z wykresami w klasie its_base_test. Do utworzenia testbedu Mobly służy plik config.yml (YAML). W tym pliku konfiguracyjnym można skonfigurować wiele testbedów, np. tablet i testbed do testowania fuzji czujników. W sekcji kontrolera każdego testbedu możesz określić device_ids, aby zidentyfikować odpowiednie urządzenia z Androidem dla programu uruchamiającego testy. Oprócz identyfikatorów urządzeń w klasie testu przekazywane są inne parametry, takie jak brightness tabletu, chart_distance, debug_mode, camera_id i scene_id. Typowe wartości parametrów testu to:
brightness: 192 (all tablets except Pixel C)
chart_distance: 31.0 (rev1/rev1a box for FoV < 90° cameras)
chart_distance: 22.0 (rev2 test rig for FoV > 90° cameras)
Testowanie na tablecie
W przypadku testowania na tablecie w nazwie testbedu musi występować słowo kluczowe TABLET. Podczas inicjowania program uruchamiający testy Mobly inicjuje TestParams i przekazuje je do poszczególnych testów.
Poniżej znajdziesz przykładowy plik config.yml do uruchamiania testów na tablecie.
TestBeds:
- Name: TEST_BED_TABLET_SCENES
# Test configuration for scenes[0:4, 6, _change]
Controllers:
AndroidDevice:
- serial: 8A9X0NS5Z
label: dut
- serial: 5B16001229
label: tablet
TestParams:
brightness: 192
chart_distance: 22.0
debug_mode: "False"
chart_loc_arg: ""
camera: 0
scene: <scene-name> # if <scene-name> runs all scenes
Testbed można wywołać za pomocą tools/run_all_tests.py. Jeśli nie ma wartości w wierszu poleceń, testy są uruchamiane z wartościami z pliku config.yml.
Dodatkowo możesz zastąpić wartości camera i scene w pliku konfiguracyjnym w wierszu poleceń za pomocą poleceń podobnych do tych w Androidzie 11 lub starszym.
Przykład:
python tools/run_all_tests.py
python tools/run_all_tests.py camera=1
python tools/run_all_tests.py scenes=2,1,0
python tools/run_all_tests.py camera=1 scenes=2,1,0
Testowanie fuzji czujników
W przypadku testowania fuzji czujników,
nazwa testbedu musi zawierać słowo kluczowe
SENSOR_FUSION. Prawidłowy testbed jest określany na podstawie testowanych scen. Android 12 obsługuje kontrolery Arduino
i Canakit
do fuzji czujników.
Poniżej znajdziesz przykładowy plik config.yml do uruchamiania testów fuzji czujników.
Testbeds
- Name: TEST_BED_SENSOR_FUSION
# Test configuration for sensor_fusion/test_sensor_fusion.py
Controllers:
AndroidDevice:
- serial: 8A9X0NS5Z
label: dut
TestParams:
fps: 30
img_size: 640,480
test_length: 7
debug_mode: "False"
chart_distance: 25
rotator_cntl: arduino # cntl can be arduino or canakit
rotator_ch: 1
camera: 0
Aby uruchomić testy fuzji czujników za pomocą platformy testowej fuzji czujników, użyj:
python tools/run_all_tests.py scenes=sensor_fusion
python tools/run_all_tests.py scenes=sensor_fusion camera=0
Wiele testbedów
W pliku konfiguracyjnym można uwzględnić wiele testbedów. Najczęstszym połączeniem jest używanie zarówno testbedu tabletu, jak i testbedu fuzji czujników.
Poniżej znajdziesz przykładowy plik config.yml z testbedami tabletu i fuzji czujników.
Testbeds
- Name: TEST_BED_TABLET_SCENES
# Test configuration for scenes[0:4, 6, _change]
Controllers:
AndroidDevice:
- serial: 8A9X0NS5Z
label: dut
- serial: 5B16001229
label: tablet
TestParams:
brightness: 192
chart_distance: 22.0
debug_mode: "False"
chart_loc_arg: ""
camera: 0
scene: <scene-name> # if <scene-name> runs all scenes
- Name: TEST_BED_SENSOR_FUSION
# Test configuration for sensor_fusion/test_sensor_fusion.py
Controllers:
AndroidDevice:
- serial: 8A9X0NS5Z
label: dut
TestParams:
fps: 30
img_size: 640,480
test_length: 7
debug_mode: "False"
chart_distance: 25
rotator_cntl: arduino # cntl can be arduino or canakit
rotator_ch: 1
camera: 0
Testy ręczne
Testy ręczne są nadal obsługiwane w Androidzie 12.
Testbed musi jednak identyfikować testy jako takie za pomocą słowa kluczowego MANUAL w nazwie testbedu. Testbed nie może też zawierać identyfikatora tabletu.
Poniżej znajdziesz przykładowy plik config.yml do testów ręcznych.
TestBeds:
- Name: TEST_BED_MANUAL
Controllers:
AndroidDevice:
- serial: 8A9X0NS5Z
label: dut
TestParams:
debug_mode: "False"
chart_distance: 31.0
camera: 0
scene: scene1
Sceny testowe bez tabletów
Testowanie sceny 0 i sceny 5 można przeprowadzić za pomocą TEST_BED_TABLET_SCENES lub TEST_BED_MANUAL. Jeśli jednak testowanie odbywa się za pomocą TEST_BED_TABLET_SCENES, tablet musi być podłączony, a jego numer seryjny musi być prawidłowy, nawet jeśli tablet nie jest używany, ponieważ konfiguracja klasy testu przypisuje wartość numeru seryjnego tabletu.
Uruchamianie poszczególnych testów
Poszczególne testy można uruchamiać tylko na potrzeby debugowania, ponieważ ich wyniki nie są
zgłaszane do CTS Verifier. Ponieważ plików config.yml nie można zastąpić w wierszu poleceń w przypadku camera i scene, te parametry muszą być prawidłowe w pliku config.yml dla danego testu. Jeśli w pliku konfiguracyjnym jest więcej niż 1 testbed, musisz też określić testbed za pomocą flagi --test_bed. Przykład:
python tests/scene1_1/test_black_white.py --config config.yml --test_bed TEST_BED_TABLET_SCENES
Artefakty testowe
W Androidzie 12 artefakty testowe Camera ITS są przechowywane podobnie jak w Androidzie 11 lub starszym, ale z tymi zmianami:
- Dla przejrzystości do losowego ciągu 8 znaków w katalogu artefaktów testowych
/tmpdodano prefiksCameraITS_. - Dane wyjściowe i błędy testu są przechowywane w pliku
test_log.DEBUGdla każdego testu zamiast w plikachtest_name_stdout.txtitest_name_stderr.txt. - Logi DUT i tabletu z każdego testu są przechowywane w katalogu
/tmp/CameraITS_########, co upraszcza debugowanie, ponieważ rejestrowane są wszystkie informacje potrzebne do debugowania problemów z 3A.
Zmiany w testach
W Androidzie 12 sceny tabletu są plikami PNG, a nie PDF. Używanie plików PNG umożliwia prawidłowe wyświetlanie scen na większej liczbie modeli tabletów.
scene0/test_jitter.py
Test test_jitter jest uruchamiany w Androidzie 12 na fizycznych ukrytych kamerach.
scene1_1/test_black_white.py
W Androidzie 12 test test_black_white ma funkcje zarówno testu test_black_white, jak i test_channel_saturation.
W tabeli poniżej opisano 2 poszczególne testy w Androidzie 11.
| Nazwa testu | Pierwszy poziom interfejsu API | Asercje |
|---|---|---|
| scene1_1/test_black_white.py | WSZYSTKO | Krótka ekspozycja, niskie wzmocnienie, wartości RGB ~[0, 0, 0] Długa ekspozycja, wysokie wzmocnienie, wartości RGB ~[255, 255, 255] |
| scene1_1/test_channel_saturation.py | 29 | Zmniejszona tolerancja różnic [255, 255, 255], aby wyeliminować odcień koloru na białych obrazach. |
W tabeli poniżej opisano scalony test, scene1_1/test_black_white.py, w Androidzie 12.
| Nazwa testu | Pierwszy poziom interfejsu API | Asercje |
|---|---|---|
| scene1_1/test_black_white.py | WSZYSTKO | Krótka ekspozycja, niskie wzmocnienie, wartości RGB ~[0, 0, 0] Długa ekspozycja, wysokie wzmocnienie, wartości RGB ~[255, 255, 255] i zmniejszona tolerancja między wartościami, aby wyeliminować odcień koloru na białych obrazach. |
scene1_1/test_burst_sameness_manual.py
Test test_burst_sameness_manual jest uruchamiany w Androidzie 12 na fizycznych ukrytych kamerach.
scene1_2/test_tonemap_sequence.py
Test test_tonemap_sequence jest uruchamiany w Androidzie 12 na kamerach z ograniczonymi funkcjami.
scene1_2/test_yuv_plus_raw.py
Test test_yuv_plus_raw jest uruchamiany w Androidzie 12 na fizycznych ukrytych kamerach.
scene2_a/test_format_combos.py
Test test_format_combos jest uruchamiany w Androidzie 12 na kamerach z ograniczonymi funkcjami.
scene3/test_flip_mirror.py
Test test_flip_mirror jest uruchamiany w Androidzie 12 na kamerach z ograniczonymi funkcjami.
scene4/test_aspect_ratio_and_crop.py
W Androidzie 12 refaktoryzowano wyszukiwanie okręgów w scene4/test_aspect_ratio_and_crop.py.
W starszych wersjach Androida używano metody, która polegała na znajdowaniu konturu podrzędnego (okręgu) w konturze nadrzędnym (kwadracie) za pomocą filtrów rozmiaru i koloru. Android 12 używa metody, która polega na znajdowaniu wszystkich konturów, a następnie filtrowaniu ich przez wyszukiwanie cech, które są najbardziej okrągłe. Aby wyeliminować fałszywe okręgi na wyświetlaczu, wymagana jest minimalna powierzchnia konturu, a kontur okręgu musi być czarny.
Kontury i ich kryteria wyboru są widoczne na ilustracji poniżej.
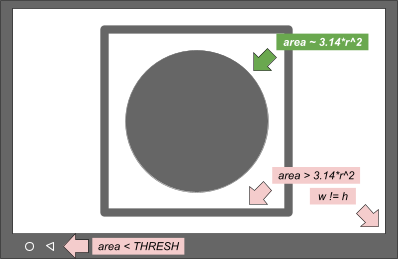
Rysunek 1. Rysunek koncepcyjny konturów i kryteriów wyboru
Metoda Androida 12 jest prostsza i rozwiązuje problem z przycinaniem ramki ograniczającej na niektórych tabletach z wyświetlaczem. Wszystkie kandydaty na okręgi są rejestrowane na potrzeby debugowania.
W Androidzie 12 test przycinania jest uruchamiany na urządzeniach z poziomem FULL i LEVEL3. W Androidzie 11 lub starszym asercje testu przycinania są pomijane w przypadku urządzeń z poziomem FULL.
W tabeli poniżej znajdziesz asercje dla test_aspect_ratio_and_crop.py, które odpowiadają danemu poziomowi urządzenia i pierwszemu poziomowi interfejsu API.
| Poziom urządzenia | Pierwszy poziom interfejsu API | Asercje |
|---|---|---|
| LIMITED | WSZYSTKO | Format obrazu Pole widzenia w formatach 4:3, 16:9, 2:1 |
| FULL | < 31 | Format obrazu Pole widzenia w formatach 4:3, 16:9, 2:1 |
| FULL | ≥ 31 | Przycinanie Format obrazu Pole widzenia w formatach 4:3, 16:9, 2:1 |
| LEVEL3 | WSZYSTKO | Przycinanie Format obrazu Pole widzenia w formatach 4:3, 16:9, 2:1 |
scene4/test_multi_camera_alignment.py
Metoda undo_zoom() do przechwytywania YUV w scene4/test_multi_camera_alignment.py została refaktoryzowana, aby dokładniej uwzględniać przycinanie na czujnikach, które nie pasują do formatu obrazu przechwytywania.
Kod Pythona 2 w Androidzie 11
zoom_ratio = min(1.0 * yuv_w / cr_w, 1.0 * yuv_h / cr_h)
circle[i]['x'] = cr['left'] + circle[i]['x'] / zoom_ratio
circle[i]['y'] = cr['top'] + circle[i]['y'] / zoom_ratio
circle[i]['r'] = circle[i]['r'] / zoom_ratio
Kod Pythona 3 w Androidzie 12
yuv_aspect = yuv_w / yuv_h
relative_aspect = yuv_aspect / (cr_w/cr_h)
if relative_aspect > 1:
zoom_ratio = yuv_w / cr_w
yuv_x = 0
yuv_y = (cr_h - cr_w / yuv_aspect) / 2
else:
zoom_ratio = yuv_h / cr_h
yuv_x = (cr_w - cr_h * yuv_aspect) / 2
yuv_y = 0
circle['x'] = cr['left'] + yuv_x + circle['x'] / zoom_ratio
circle['y'] = cr['top'] + yuv_y + circle['y'] / zoom_ratio
circle['r'] = circle['r'] / zoom_ratio
sensor_fusion/test_sensor_fusion.py
W Androidzie 12 do testu fuzji czujników dodano metodę wykrywania cech na obrazach.
W wersjach starszych niż Android 12 do znalezienia najlepszych 240 cech używany jest cały obraz, który jest następnie maskowany do środkowych 20%, aby uniknąć efektów migawki szczelinowej. Minimalna liczba cech to 30.
Jeśli cechy znalezione tą metodą są niewystarczające, Android 12 maskuje obszar wykrywania cech do środkowych 20% i ogranicza maksymalną liczbę cech do dwukrotności minimalnej liczby cech.
Ilustracja poniżej przedstawia różnicę między wykrywaniem cech w Androidzie 11 a Androidzie 12. Zwiększenie progu minimalnej liczby cech powoduje wykrywanie cech niskiej jakości i negatywnie wpływa na pomiary.
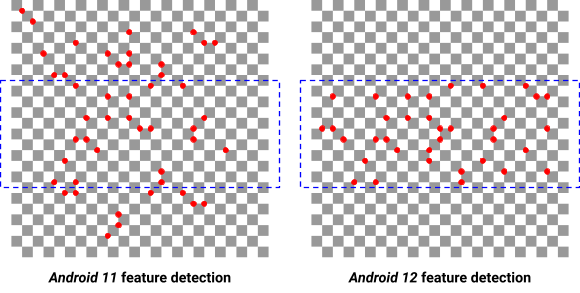
Rysunek 2. Różnica w wykrywaniu cech między Androidem 11 a Androidem 12
Nowe testy
scene0/test_solid_color_test_pattern.py
W Androidzie 12 włączono nowy test, test_solid_color_test_pattern. Ten test jest włączony dla wszystkich kamer i został opisany w tabeli poniżej.
| Scena | Nazwa testu | Pierwszy poziom interfejsu API | Opis |
|---|---|---|---|
| 0 | test_solid_color_test_pattern | 31 | Potwierdza wyjście obrazu w jednolitym kolorze i programowalność koloru obrazu. |
Aby obsługiwać tryb prywatności kamery, należy włączyć wzorce testowe w jednolitym kolorze.
Test test_solid_color_test_pattern potwierdza wyjście obrazu YUV w jednolitym kolorze z kolorem zdefiniowanym przez wybrany wzorzec oraz zmiany koloru obrazu zgodnie ze specyfikacją.
Parametry
cameraPrivacyModeSupport: określa, czy kamera obsługuje tryb prywatności.android.sensor.testPatternMode: ustawia tryb wzorca testowego. Ten test używaSOLID_COLOR.android.sensor.testPatternData: ustawia wartości wzorca testowego R, Gr, Gb, G dla trybu wzorca testowego.
Opis wzorca testowego w jednolitym kolorze znajdziesz w sekcji
SENSOR_TEST_PATTERN_MODE_SOLID_COLOR.
Metoda
Przechwytywane są klatki YUV dla ustawionych parametrów i sprawdzana jest zawartość obrazu. Wzorzec testowy jest generowany bezpośrednio z czujnika obrazu, więc nie jest wymagana żadna konkretna scena. Jeśli obsługiwana jest funkcja PER_FRAME_CONTROL, dla każdego testowanego ustawienia przechwytywana jest pojedyncza klatka YUV. Jeśli
PER_FRAME_CONTROL nie jest obsługiwana, przechwytywane są 4 klatki, a analizowana jest tylko
ostatnia klatka, aby zmaksymalizować pokrycie testu w LIMITED kamerach.
Przechwytywanie YUV jest ustawione na w pełni nasycone wzorce testowe BLACK, WHITE, RED, GREEN i BLUE. Ponieważ definicja wzorca testowego jest zgodna ze wzorcem Bayera czujnika, kanały kolorów muszą być ustawione dla każdego koloru zgodnie z tabelą poniżej.
| Kolor | testPatternData (RGGB) |
|---|---|
| CZARNE |
(0, 0, 0, 0)
|
| BIAŁY |
(1, 1, 1, 1)
|
| CZERWONY |
(1, 0, 0, 0)
|
| ZIELONY |
(0, 1, 1, 0)
|
| NIEBIESKI |
(0, 0, 0, 1)
|
Tabela asercji
W tabeli poniżej opisano asercje testu test_solid_color_test_pattern.py.
| Kamera Pierwszy poziom interfejsu API |
Typ kamery | Asercje kolorów |
|---|---|---|
| 31 | Bayer | CZARNY, BIAŁY, CZERWONY, ZIELONY, NIEBIESKI |
| 31 | MONOCHROMATYCZNY | CZARNY, BIAŁY |
| < 31 | Bayer/MONOCHROMATYCZNY | CZARNY |
Testy klasy wydajności
scene2_c/test_camera_launch_perf_class.py
Sprawdza, czy czas uruchamiania kamery jest krótszy niż 500 ms w przypadku przedniej i tylnej kamery głównej ze sceną twarzy scene2_c.
scene2_c/test_jpeg_capture_perf_class.py
Sprawdza, czy opóźnienie przechwytywania JPEG w rozdzielczości 1080p jest krótsze niż 1 sekunda w przypadku przedniej i tylnej kamery głównej ze sceną twarzy scene2_c.