
Android Camera Image Test Suite (ITS) 是 Android Compatibility Test Suite (CTS) Verifier 的一部分,包含可驗證圖片內容的測試。CTS 驗證器支援使用 Camera ITS-in-a-box 自動執行 ITS 測試;手動測試支援所有 Android 裝置外型規格。
ITS-in-a-box 具有下列優點:
- 自動化動作。測試期間不需要人為介入。
- 輕鬆排解問題。測試環境一致性可減少設定錯誤,並提高可重現性。
- 效率。可針對個別攝影機/場景重試,提升測試執行效率。
選取鑽機
ITS-in-a-box 包含以電腦輔助設計 (CAD) 圖繪雷射切割的塑膠盒、圖表平板電腦,以及受測裝置 (DUT)。下表說明不同 ITS-in-a-box 裝置的功能和規格。如要選取合適的支架,請考量 DUT 的特定視野和最短對焦距離。對於視野角度為 60 到 110 度,且最短對焦距離為 22 到 31 公分的攝影機系統,我們建議使用模組化底座支架,因為這種支架的適應性較高。如果相機系統包含最小焦距介於 31 公分到 110 公分之間的望遠鏡頭,建議使用模組化底座,並搭配與鏡頭焦距相近的望遠延伸裝置。伸縮桿長度從 50 公分到 90 公分不等。
| Rig | 圖表距離 | DUT 攝影機視野範圍 (約略) | 功能 |
|---|---|---|---|
| 模組化基礎骨架 | 22 公分 | 60° - 120° |
|
| 模組化底座和伸縮桿 | 22 公分 - 110 公分* | 10° - 120° | 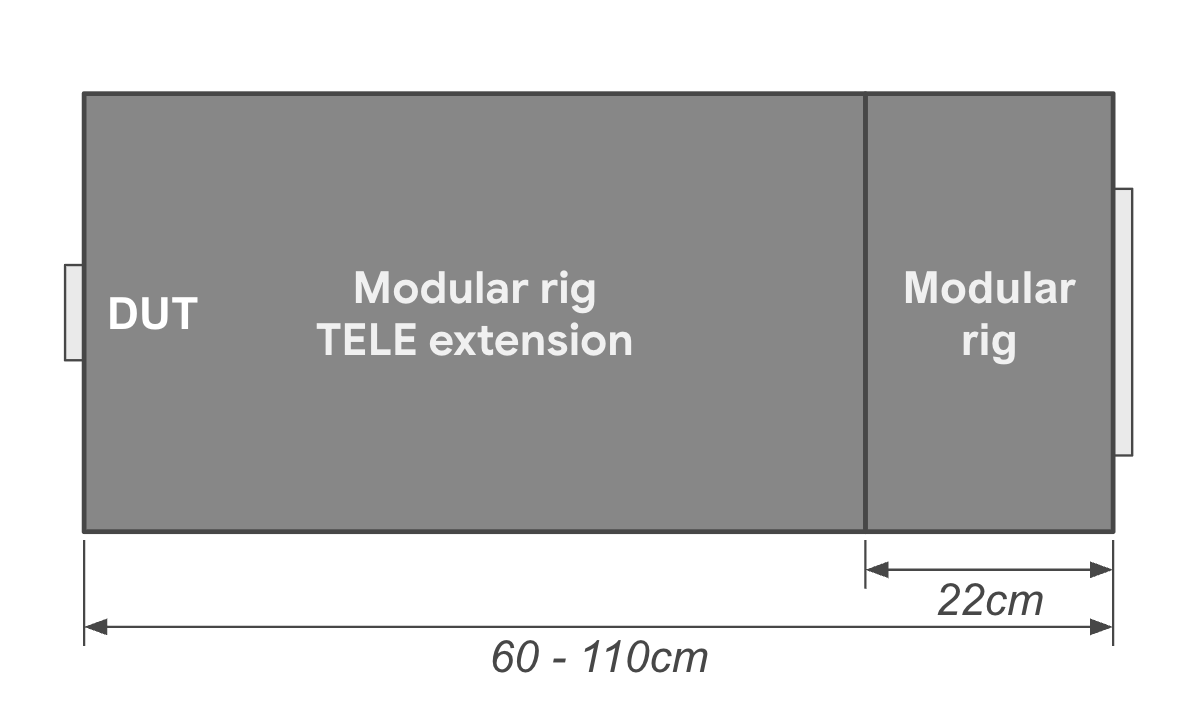
|
| WFoV ITS-in-a-box | 22 公分 | 60° - 120° |
|
| RFoV ITS-in-a-box | 31 公分 | 60° - 90° |
|
| 第 2 代 ITS-in-a-box | 31 公分 | 60° - 90° |
|
| 圖表距離 | 場景縮放百分比 | 圖片 |
|---|---|---|
| 31 公分 | 33% |

|
| 50 公分 | 50% |
|
| 80 公分 | 100% |
|
如要開始使用 Camera ITS-in-a-box,請按照下列步驟操作:
設定平板電腦
本節將逐步說明如何設定平板電腦,以便使用
CameraITS 目錄中的
Camera ITS 測試。以下操作說明以 Pixel C 為例。如要瞭解平板電腦的規定和建議,請參閱「平板電腦規定」。
注意:Camera ITS Python 指令碼會自動在平板電腦上設定下列選項:
「設定」>「螢幕」>「休眠」>「閒置 30 分鐘後」
「自動調整亮度」>「關閉」
- 為平板電腦充電並開啟電源。如果系統提示設定帳戶,請略過此步驟 (Camera ITS 不需要與平板電腦配對任何帳戶)。
- 將平板電腦更新至 Android 7.0 以上版本。Android 6.x 以下版本不支援 Camera ITS。
- 啟用開發人員模式。
- 返回「設定」,然後選取「開發人員選項」。
啟用選項 - 開啟
- 螢幕不休眠
- USB 偵錯 (這可讓主機在偵錯模式下執行平板電腦。首次將平板電腦連線至主機時,平板電腦會提示「允許 USB 偵錯嗎?」如果平板電腦未顯示偵錯提示,請拔除平板電腦再重新連接。
停用選項 - 系統自動更新
- 透過 USB 驗證應用程式
- 執行
$ adb devices列出可用裝置,判斷 DUT 和圖表 ID。如要判斷device_id和chart_id,請插拔裝置,並觀察連線和中斷連線的裝置。 - 執行三項測試,抑制可能會遮蓋平板電腦螢幕上圖表的提示和使用者提示。
- 將平板電腦正面朝上放在桌上 (請勿將平板電腦裝在盒子的背板上)。
- 請執行下列指令:
python tools/run_all_tests.py device=$device_id camera=0 chart=$chart_id scenes=2,3
- 再次執行指令。平板電腦會提示「要保留這個檔案的副本嗎?」,並建議使用 Google 雲端硬碟。如要清除這則提示 (並防止日後顯示提示),請按下「雲端硬碟」圖示,然後輕觸「取消」,即可停止上傳至雲端硬碟。
- 最後,執行
tools/run_all_tests.py並確認場景會隨著指令碼循環播放不同場景而自動變更。雖然大部分測試都會失敗 (因為攝影機並未對準圖表),但你可以確認平板電腦是否正確循環播放場景,且螢幕上不會顯示任何提示或其他彈出式視窗。
執行測試
執行 ITS-in-a-box 前,請確認測試設定包含下列軟硬體:
- 一個 (1) ITS-in-a-box
- 一台高解析度 10 吋平板電腦,用於顯示場景,序號:5811000011
- 一部已安裝 CTS 驗證器 7.0_8 以上版本應用程式的 DUT。Example DUT:
- 一 (1) 部 Pixel NOF26W,用於測試後置鏡頭(0),序號:FA6BM0305016。如要安裝 CTS 驗證器應用程式,請解壓縮
android-cts-verifier.zip,然後執行adb -s FA6BM0305016 install -r -g android-cts-verifier/CtsVerifier.apk
- 一 (1) 部 Pixel NOF26W,用於測試後置鏡頭(0),序號:FA6BM0305016。如要安裝 CTS 驗證器應用程式,請解壓縮
執行平板電腦上的場景
如要在後置鏡頭上執行場景 0 到 4、6 和 scene_change,請按照下列步驟操作:
cd android-cts-verifier/CameraITS. build/envsetup.shpython tools/run_all_tests.py camera=0
範例:
重試場景
你可以為單一攝影機重試場景:
- 如要重試單一攝影機的場景:
python tools/run_all_tests.py device=FA6BM0305016 camera=0 scenes=3,4
執行場景 5
場景 5 需要特殊設定和特定照明 (詳情請參閱 CTS Verifier 中的 CameraITS.pdf,您可以在「Compatibility Test Suite Downloads」下載)。您必須分別執行場景 5 (在方塊外),並使用 TEST_BED_MANUAL 測試平台。
如要在單一裝置上執行前置和後置鏡頭的場景 5,請按照下列步驟操作:
python tools/run_all_tests.py device=FA6BM0305016 camera=0 scenes=5python tools/run_all_tests.py device=FA6BM0305016 camera=1 scenes=5
取得結果
您可以在測試期間查看結果,並將完成的結果儲存為報告。
- 查看結果。如要將 Camera ITS 結果儲存為報表,請按照下列步驟操作:
- 按下「通過」並儲存報告。
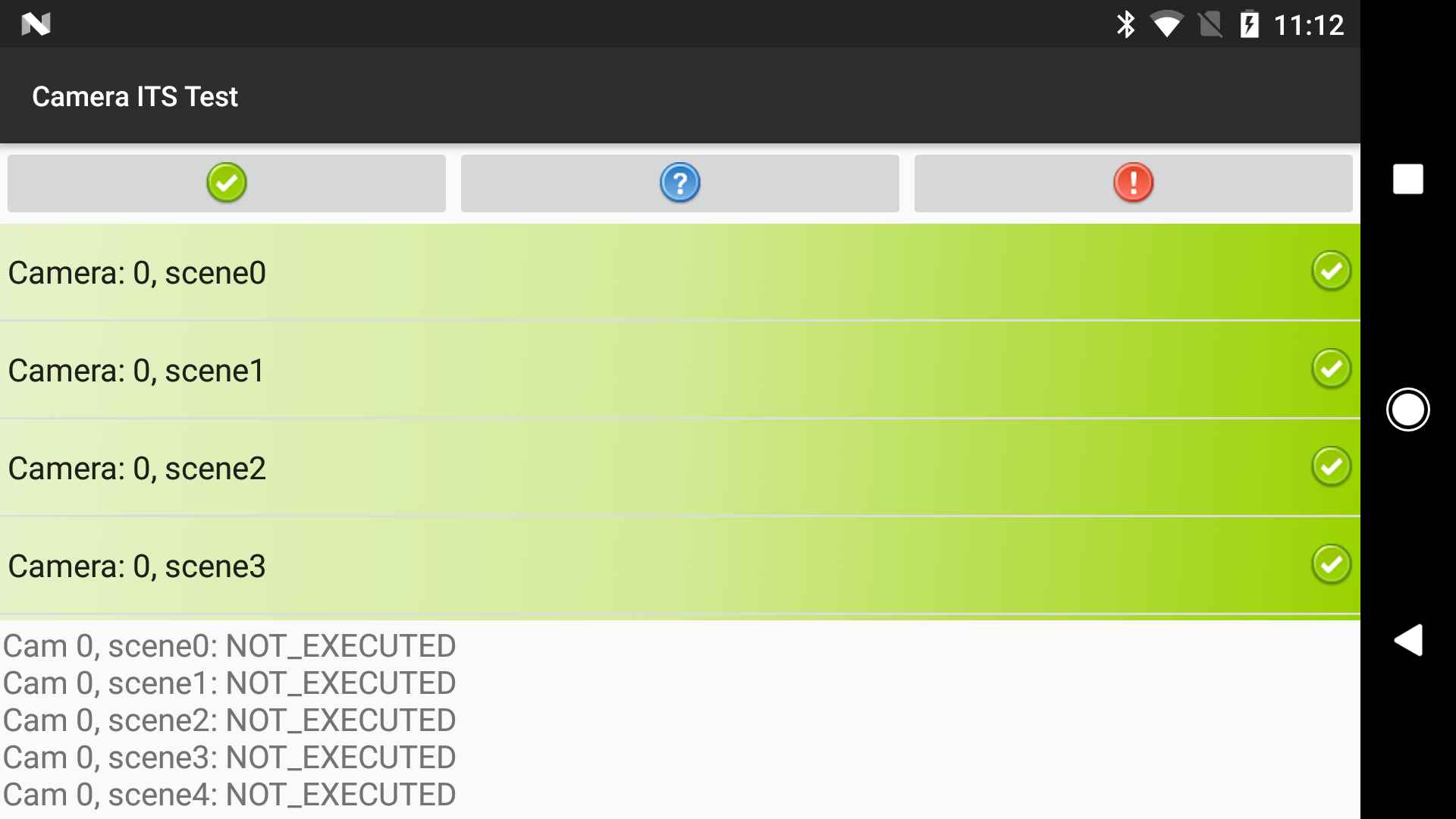
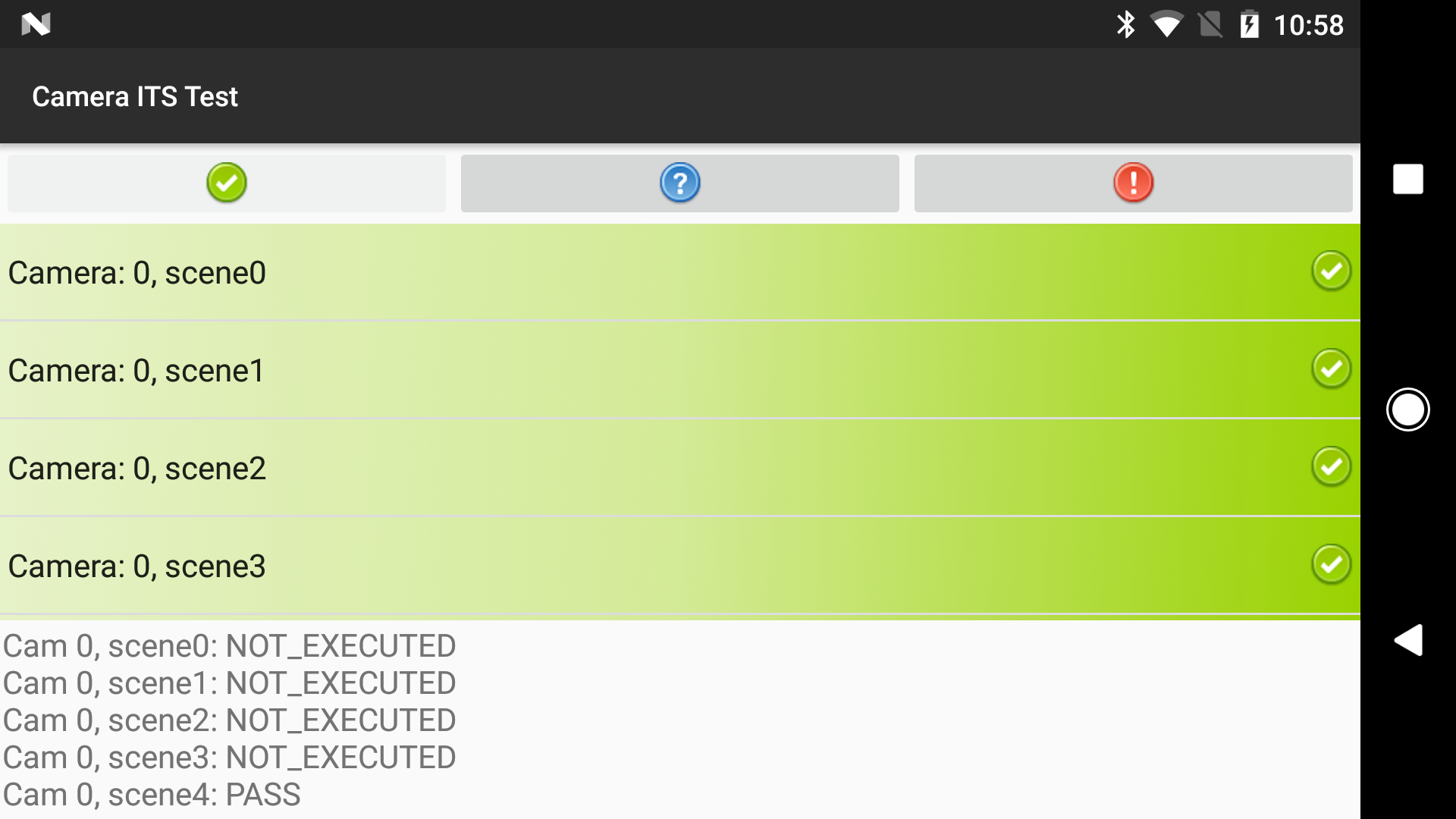
圖 3. 相機 ITS 報告 - 從裝置提取報告:
adb -s FA6BM0305016 pull /sdcard/verifierReports
- 解壓縮報表檔案,然後查看
test_result.xml。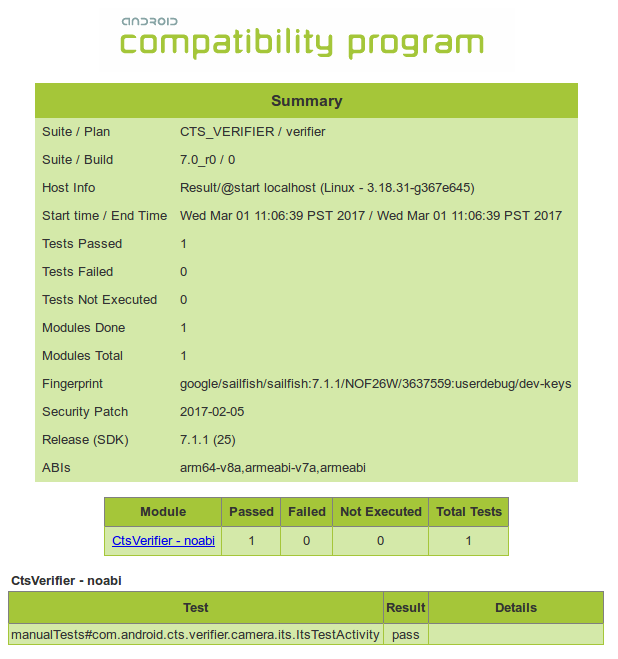
圖 4. 攝影機 ITS 報告
- 按下「通過」並儲存報告。
平板電腦需求
如果是 Android 15 以上版本,用來顯示 ITS 圖表的平板電腦必須在下列平板電腦允許清單中。如需支援低光源場景測試的平板電腦清單,請參閱「支援低光源場景測試的平板電腦」。如要瞭解 Android 14 以下版本的平板電腦需求,請參閱這篇文章。
我們根據下列條件選擇允許清單中的平板電腦:
- 顯示大小約 10 吋,螢幕解析度大於 1920 x 1200 像素。
- 不得有任何因脈衝寬度調變 (PWM) 控制螢幕調暗而導致的閃爍。
- 能夠執行 ITS 測試傳送的 ADB 指令,並以指示的螢幕亮度顯示圖表圖片。
brightness 值必須根據平板電腦型號在 config.yml 中設定。如要判斷平板電腦型號是否對應於允許清單中的裝置名稱,請執行 adb shell getprop | grep 'ro.product.device' adb 指令,列印 ro.product.device 值。
| 裝置 | 顯示大小 (英吋) |
顯示大小 (像素) |
平板電腦尺寸 (英吋) |
螢幕 亮度 |
裝置名稱 (ro.product .device) |
平板電腦作業系統 版本 |
|---|---|---|---|---|---|---|
| Google Pixel C |
10.2 | 2560 x 1800 | 9.53 x 7.05 x 0.28 | 96 | 龍 | Android 6 以上版本 |
| Honor Pad 8 |
11 | 2000 x 1200 | 10.18 x 6.76 x 0.29 | 192 | HNHEY-Q | Android 12 |
| Honor Pad 20 |
12.1 | 3000 x 1872 | 10.91 x 7.06 x 0.25 | 96 | HNHEY4-Q、HNHEY4-Q1 | Android 16 |
| Honor Pad V9 |
11.5 | 2800 x 1840 | 10.2 x 6.93 x 0.24 | 192 | HNROL-M、HNROL-M1 | Android 15 |
| Huawei MediaPad m5 |
10.8 | 2560 x 1600 | 10.18 x 6.76 x 0.29 | 192 | HWCMR09 | Android 8 以上版本 |
| Lenovo Tab M10 Plus |
10.3 | 1920 x 1200 | 9.61 x 6.03 x 0.32 | 192 | X606F | Android 9 以上版本 |
| Lenovo Tab P11 |
11 | 2000 x 1200 | 10.17 x 6.42 x 0.30 | 192 | J606F | Android 11 以上版本 |
| Lenovo Tab P11 Gen2 |
11.5 | 2000 x 1200 | 10.59 x 6.67 x 0.29 | 192 | TB350FU | Android 13 以上版本 |
| Nokia T21 |
10.4 | 2000 x 1200 | 9.74 x 6.19 x 0.30 | 192 | AGTA | Android 12 以上版本 |
| Samsung Galaxy Tab A7 |
10.4 | 2000 x 1200 | 9.75 x 6.2 x 0.28 | 192 | gta4lwifi | Android 10 以上版本 |
| Samsung Galaxy Tab A8 |
10.5 | 1920 x 1200 | 9.72 x 6.73 x 0.27 | 192 | gta8wifi | Android 11 以上版本 |
| Samsung Galaxy Tab A9+ |
11 | 1920 x 1200 | 10.12 x 6.64 x 0.27 | 192 | gta9pwifi | Android 13 以上版本 |
| Samsung Galaxy Tab S10 FE |
11 | 2304 x 1440 | 10.01 x 6.53 x 0.24 | 192 | gts10fewifi | Android 15 以上版本 |
| Vivo Pad2 |
12.1 | 2800 x 1968 | 10.47 x 7.54 x 0.26 | 192 | DPD2221 | Android 13 以上版本 |
| 小米平板 5 |
11 | 2560 x 1600 | 10.18 x 6.76 x 0.29 | 192 | nabu | Android 13 以上版本 |
| 小米 Redmi 平板電腦 |
10.61 | 2000 x 1200 | 9.86 x 6.22 x 0.28 | 192 | yunluo | Android 14 以上版本 |
| 小米 Redmi Pad SE |
11 | 2560 x 1600 | 10.06 x 6.58 x 0.29 | 192 | xun | Android 13 以上版本 |
支援低光源場景的平板電腦
下表列出支援低光源場景測試的平板電腦。這些平板電腦可達到昏暗場景所需的亮度,讓 DUT 正確曝光圖表。| 裝置 | 裝置名稱 (ro.product.device) | 平板電腦作業系統版本 |
|---|---|---|
| Honor Pad V9 |
HNROL-M1 | Android 15 以上版本 |
| Huawei MediaPad m5 |
HWCMR09 | Android 8 以上版本 |
| Samsung Galaxy Tab A8 | gta8wifi | Android 11 以上版本 |
| Samsung Galaxy Tab A9+ | gta9pwifi | Android 13 以上版本 |
| 小米平板 5 | nabu | Android 13 以上版本 |
| 小米 Redmi Pad SE |
xun | Android 13 以上版本 |
Android 14 以下版本的平板電腦需求
平板電腦的螢幕尺寸必須約為 10 吋,螢幕解析度必須大於 1920 x 1200 像素。平板電腦不得使用脈衝寬度調變 (PWM) 設定亮度。brightness 值必須根據平板電腦型號,在 config.yml 中設定。下表列出建議用於 ITS 測試的平板電腦,以及平板電腦適用的 DUT Android 版本。
| 裝置 | 顯示大小 (英吋) |
顯示大小 (像素) |
平板電腦尺寸 (英吋) |
螢幕 亮度 |
顯示 位元 |
支援的 DUT 作業系統 |
支援的 平板電腦作業系統 |
|---|---|---|---|---|---|---|---|
| Samsung Galaxy Tab A8 |
10.5 | 1920 x 1200 | 9.72 x 6.37 x 0.27 | 192 | 8 | Android 13 以上版本 | Android 11 以上版本 |
| 小米平板 5 |
11 | 2560 x 1600 | 10.03 x 6.55 x 0.27 | 1024 | 11 | Android 12 以上版本 | 僅限 Android 11 |
| Lenovo Tab M10 Plus |
10.3 | 1920 x 1200 | 9.61 x 6.03 x 0.32 | 192 | 8 | Android 12 以上版本 | Android 9 以上版本 |
| Samsung Galaxy Tab A7 |
10.4 | 2000 x 1200 | 9.75 x 6.2 x 0.28 | 192 | 8 | Android 12 以上版本 | Android 10 以上版本 |
| Chuwi Hi9 Air 10.1 |
10.1 | 2560 x 1600 | 9.52 x 6.77 x 0.31 | 192 | 8 | Android 7 以上版本 | Android 8 以上版本 |
| Asus ZenPad 3 |
9.7 | 2048 x 1536 | 9.47 x 6.44 x 0.28 | 192 | 8 | Android 7 以上版本 | Android 6 以上版本 |
| Huawei MediaPad m5 |
10.8 | 2560 x 1600 | 10.18 x 6.76 x 0.29 | 192 | 8 | Android 7 以上版本 | Android 8 以上版本 |
| Google Pixel C |
10.2 | 2560 x 1800 | 9.53 x 7.05 x 0.28 | 96 | 8 | Android 7 以上版本 | Android 6 以上版本 |
| Sony Xperia Z4 |
10.1 | 2560 x 1600 | 10 x 6.57 x 0.24 | 192 | 8 | Android 7 以上版本 | Android 5 以上版本 |
常見問題
問 1:如何判斷裝置需要哪些測試架?
RFoV ITS-in-a-box 修訂版 1 會測試
CameraITS/tests 目錄中的平板電腦場景,確認 RFoV 攝影機是否正常運作。RFoV 定義為 60° < FoV < 90°。如果攝影機的 FoV 較大,圖片中可能會出現燈光,或圖表涵蓋的 FoV 區域太小,進而影響測試結果。
WFoV ITS-in-a-box 修訂版本 2 會測試
CameraITS/tests 目錄中的平板電腦場景,確認 WFoV 相機是否正常運作。WFoV 定義為 FoV >= 90°。修訂版本 2 測試裝置在功能上與修訂版本 1 相同,但尺寸較大。修訂版 2 測試裝置
可測試 Android 9 以上版本的 RFoV 和 WFoV 攝影機。由於佔用空間較大,如果 DUT 是平板電腦,建議使用修訂版本 2
模組化基礎設備
會測試
CameraITS/tests 目錄中的平板電腦場景,確認 WFoV 攝影機是否正常運作。WFoV 定義為 FoV >= 90°。模組化底座可測試搭載 Android 9 以上版本的裝置,是否支援 RFoV 和 WFoV 攝影機。此外,這項工具也支援可附加的望遠擴充裝置,用於測試最小焦距較長的望遠攝影機。模組化基礎裝置在功能上與 WFoV ITS-in-a-box 相同,但體積較小。
感應器融合盒會測試攝影機/陀螺儀時間偏移,以及多攝影機系統的影格同步,測試位於 scenes=sensor_fusion 中。如要使用 REALTIME 功能旗標,相機/陀螺儀的時間偏移必須小於 1 毫秒。
如果相機有 REALTIME 功能標記,即可使用單一裝置進行靜態 ITS 測試,並使用感應器融合裝置測試多部相機。
下表提供一組設定範例。
| 最小焦距 | 攝影機視野 | REALTIME? | 建議的設備 | 附註 |
|---|---|---|---|---|
| 31 公分 - 22 公分 | 75° | 否 | 模組化底座、WFoV 或 RFoV | Android 7.0 以上版本 |
| 31 公分 - 22 公分 | 75° | 是 | 模組化底座、WFoV 或 RFoV,以及感應器融合 | Android 9 以上版本 |
| 22 公分以下 | 75° + 95° | 是 | 模組化底座或 WFoV 和感應器融合 | Android 9 以上版本 |
| 110 公分 - 22 公分 | 75° + 95° + 20° | 是 | 模組化底座、望遠擴充功能和感應器融合 | Android 9 以上版本 |
| 110 公分 - 22 公分 | 75° + 95° + 20° | 是 | 模組化底座、長焦延伸鏡頭、感應器融合和第 2 代支架 | |
| 22 公分以下 | 75° + 95° 平板電腦 | 否 | WFoV | Android 9 以上版本 |
Q2:如何指定使用的測試裝置?
如要指定正確的測試設備,請確認圖表距離參數是否正確。 rev1 測試架 (RFoV) 的圖表距離為 31 公分,rev2 測試架 (WFoV) 的圖表距離為 22 公分。根據預設,圖表距離為 31 公分。
Android 10 升級至 Android 11
如要在 Android 10 到 11 中找出正確的測試設備,請在指令列中加入dist 標記。dist 的預設值為 31。執行下列指令,變更 chart_distance 參數。python tools/run_all_tests.py ... chart=# dist=22
Android 12 以上版本
如要在 Android 12 以上版本中找出正確的測試設備,可以編輯 config.yml 檔案,變更chart_distance 參數。edit config.yml chart_distance: 31.0 → chart_distance: 22.0
問 3:如何控制平板電腦亮度?
平板電腦亮度預設為 96。
如要在搭載 Android 7.0 到 Android 9 的平板電腦上變更亮度,請執行下列指令:
edit tools/wake_up_screen.py DISPLAY_LEVEL=96 → DISPLAY_LEVEL=192
如要在搭載 Android 10 到 11 的平板電腦上變更亮度,請在指令列中新增 brightness 旗標,即可變更值:
python tools/run_all_tests.py device=# camera=# chart=# brightness=192
如要在搭載 Android 12 以上版本的平板電腦上變更亮度,請執行下列指令:
edit config.yml brightness: 96 → brightness: 192
問 4:如何偵錯單一測試?
您可以個別執行測試來進行偵錯,但除非執行整個場景,否則結果不會回報給 CtsVerifier.apk。
如要在 Android 12 以上版本執行個別場景,請按照下列步驟操作:
-
編輯
config.yml檔案。edit config.yml camera: <camera-id> → camera: 0 scene: <scene-name> → scene: scene4
-
執行個別測試。
python tests/scene4/test_aspect_ratio_and_crop.py -c config.yml --test_bed TEST_BED_TABLET_SCENES
結果會列印在 /tmp/logs/mobly/TEST_BED_TABLET_SCENES/ 目錄中,並依執行時間排序。
如要在 Android 11 以下版本中執行個別場景:
- 在
tools/run_all_tests.py中新增scenes標記,載入場景:python tools/run_all_tests.py device=# camera=# chart=# scenes=#
-
在場景記錄為載入至
stdout後,按下 Control+C 即可停止測試。如果畫面上已顯示正確的場景,請喚醒螢幕:
python tools/wake_up_screen.py screen=#
-
執行個別測試。
python tests/scene#/test_*.py device=# camera=#
接著,系統會在本地目錄中產生繪圖,並將
stdout和stderr列印到畫面上。如要取得更多偵錯資訊,請在指令碼中加入
print陳述式。如要增加偵錯的測試輸出內容,請新增debug=True旗標。python tests/scene#/test_*.py device=# camera=# debug=True
執行 tools/run_all_tests.py 時,結果會顯示在本機螢幕,圖片也會儲存在本機目錄,而不是生成的 /tmp/tmp### 目錄。
問 5:為什麼需要將失敗的測試當做整個場景執行,而不是個別重新執行測試?
您可以個別執行測試以進行偵錯,但除非執行整個場景,否則系統不會向 CtsVerifier.apk 回報結果。
相機 ITS 可確保第三方應用程式具有相容的相機介面。 與單元測試類似,每項測試都會強調相機中的單一規格。為偵測不可靠的行為,這些測試應以群組形式通過整個場景。舉例來說,雖然單一不可靠的測試可能會通過整個場景的重新執行,但多項不可靠的測試很難通過。
舉例來說,假設場景中有 10 項測試,每項測試傳回 PASS 的機率為 50%。個別執行各項測試時,作業人員很有可能讓攝影機通過 Camera ITS。不過,如果測試是以場景匯總方式執行,場景通過的機率只有 0.1%。
問 6:如何執行單一場景或重新排序執行場景?
根據預設,腳本 tools/run_all_tests.py 會依序執行所有場景。不過,場景可以個別執行或依指定順序執行,並回報給 CtsVerifier.apk。
如要在 Android 11 以下版本執行個別場景 (例如場景 2),或依特定順序執行多個場景,請按照下列步驟操作:
python tools/run_all_tests.py device=# camera=# chart=# scenes=2
python tools/run_all_tests.py device=# camera=# chart=# scenes=3,2
如要在 Android 12 以上版本中執行個別場景,或依特定順序執行多個場景,請按照下列步驟操作:
python tools/run_all_tests.py scenes=2
python tools/run_all_tests.py scenes=3,2
其他參數是在 config.yml 檔案中設定。
問 7:使用平板電腦設定時,場景 1 的測試失敗,但使用紙本圖表時則通過。哪裡出了問題?
請確認平板電腦和測試環境符合下列規格。
平板電腦規格
請確認平板電腦符合下列規格:
- 顯示大小 (英吋):10 英吋
- 顯示大小 (像素):大於 1920 x 1200 像素
詳情請參閱「 平板電腦需求」。
平板電腦亮度
如果平板電腦螢幕亮度過低,測試結果可能不正確。
詳情請參閱「 如何控制平板電腦亮度?」一文。
盒子照明程度 (需要照度計)
請確認平板電腦開啟時的目標照度值介於 100 到 300 之間。
如果照度過高,scene1/test_param_flash_mode.py 會傳回 FAIL。如果照度太低,多項測試就會失敗。
問 8:如何偵錯感應器融合測試?
確認您位於
dialout群組中。groups | egrep ‘dialout'
確認感應器融合控制器已連線,方法是判斷 Microchip Technology 是否已連線至 USB 連接埠。
lsusb … Bus 003 Device 004: ID 04d8:fc73 Microchip Technology, Inc. …
多次執行測試,即可使用下列指令取得測試嘗試次數的分布情形。
Android 11 以下版本:
python tools/run_sensor_fusion_box.py device=A camera=0 num_runs=10 rotator=default
在 Android 12 以上版本中:
python tools/run_sensor_fusion_box.py num_runs=10
其他參數是在
config.yml檔案中設定。執行輸出內容位於
sensor_fusion_#資料夾下建立的/tmp/tmp###資料夾中,其中#是執行次數。常見的失敗原因包括:- 手機未正確置中。
- 圖片中找不到足夠的特徵 (通常是視野或光線問題)。
- 傳回的
FAIL有效,且必須修正攝影機和陀螺儀之間的時序偏移。
問 9:回報測試錯誤時,應附上哪些資訊?
回報測試錯誤時,請附上測試產生的檔案和圖片。
- 如果透過
tools/run_all_tests.py執行測試,請將壓縮的/tmp/目錄附加至錯誤。 - 如果您單獨執行測試,請將所有螢幕輸出內容和產生的圖片附加至錯誤。
並附上錯誤報告。如果相關測試失敗,請使用以下指令產生錯誤報告,並將產生的 zip 檔案附加至錯誤報告。
adb -s device_id bugreport
Q10:如何使用相機執行 sensor_fusion 測試場景?相機的最小對焦距離會導致 25 公分圖表距離的影像模糊。
如果攝影機無法在 25 公分處對焦,請取下感應器融合盒的圖表安裝面板。將圖表放在 DUT 可對焦的距離,並將 config.yml 中的 chart_distance 變更為 DUT 與圖表之間的測量距離。圖 5 顯示如何測量這種情況下的圖表距離。
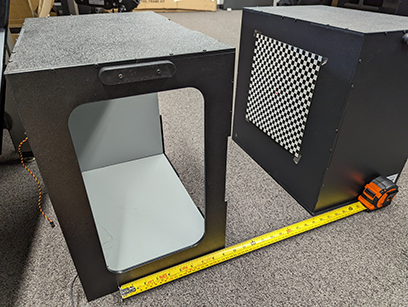
edit config.yml chart_distance: 25 → chart_distance: DISTANCE_BETWEEN_DUT_AND_CHART
問 11:如果攝影機的最小焦距會導致 31 公分處的圖表影像模糊,該如何執行平板電腦測試場景?
如果攝影機無法在 31 公分處 (RFoV 測試裝置的深度) 產生足夠清晰的影像,請將攝影機安裝在裝置前方,並與裝置保持一定距離,讓圖表場景填滿攝影機視野 (FoV) 約 60% 的範圍,以取得更清晰的影像。這個距離可能小於攝影機的最小焦距。將 chart_distance 留在 config.yml 中,距離 31 公分。平板電腦上的圖表縮放比例取決於攝影機視野,如下表所示:
| 攝影機視野 | 圖表縮放比例係數 |
|---|---|
| 60 > FoV > 40 | 0.67 倍 |
| 40 > FoV > 25 | 0.5 倍 |
| FoV < 25 | 0.33 倍 |
Q12:使用邏輯多鏡頭 API 時,哪些相機要執行哪些測試?
如果攝影機使用
REQUEST_AVAILABLE_CAPABILITIES_LOGICAL_MULTI_CAMERA,系統會在頂層邏輯攝影機上執行所有支援的 ITS 測試。ITS 測試子集會在實體子攝影機上執行,這些測試會列在 tools/run_all_tests.py
下方的 SUB_CAMERA_TESTS 常數中。