
Il test di fusione dei sensori misura l'accuratezza del timestamp dei sensori per i dispositivi Android, in particolare i sensori di immagine della fotocamera e i giroscopi. Questa pagina fornisce istruzioni dettagliate su come configurare il test Sensor Fusion e la Sensor Fusion Box per la prima volta.
Tutorial video
Questo è un tutorial video su come configurare la cassetta di fusione dei sensori.
Strumenti richiesti
Prima di iniziare, assicurati di disporre dei seguenti componenti:

- Cavo USB A a B
- Cavo da USB A a C (per lo smartphone di test)
- Cavo di alimentazione da 12 V 2 A (per la cassetta di controllo del servo)
- Cavo di alimentazione da 12 V (per l'illuminazione, con interruttore)
- Cavo di collegamento maschio-maschio da 5 V (per l'illuminazione)
- Cavo di conversione maschio-femmina da 5 V (per l'illuminazione)
Passaggio 1: connetti le lampadine
Per collegare le luci:
- Utilizza il cavo maschio-maschio per collegare le due luci alle estremità inferiori come mostrato nella figura 2. Fissa il cavo alla parte inferiore della scatola per evitare che interferisca con il funzionamento.
- Collega l'estremità della luce più vicina al foro di uscita del cavo della luce al
cavo di conversione
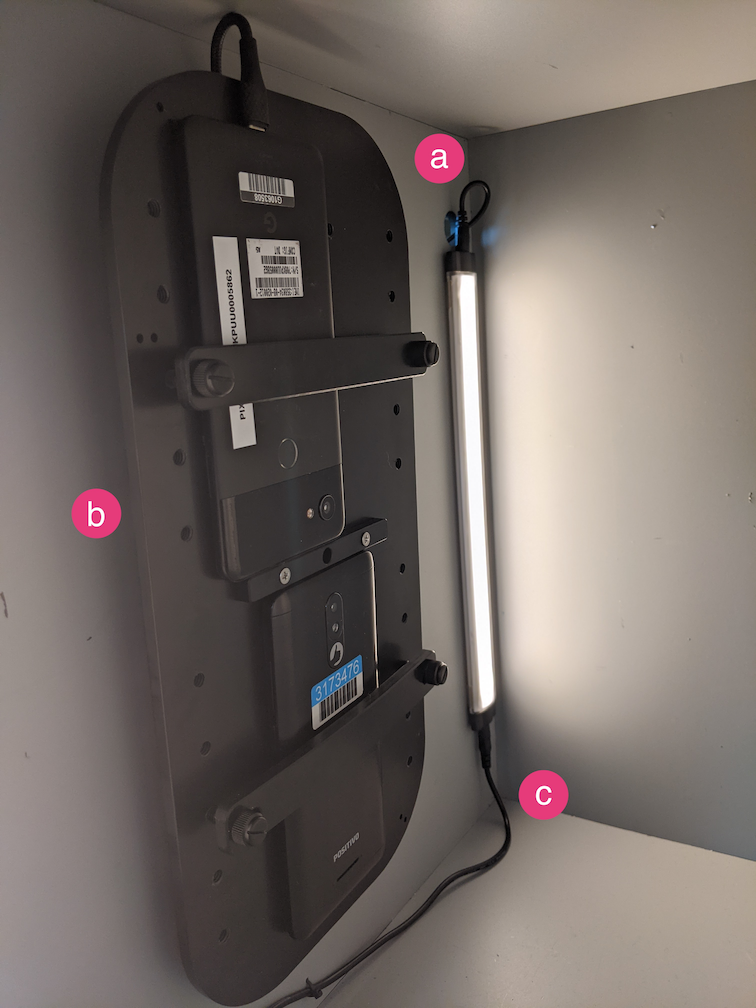
Figura 2. Collega le luci tra di loro e una al cavo di conversione - Foro di uscita del cavo della luce
- Foro di uscita del cavo USB
- Cavo di conversione maschio-maschio da 5 V
- Fai passare l'estremità scollegata del cavo di conversione attraverso il foro
rotondo che esce dalla scatola, quindi collegalo al cavo di alimentazione
per l'illuminazione.
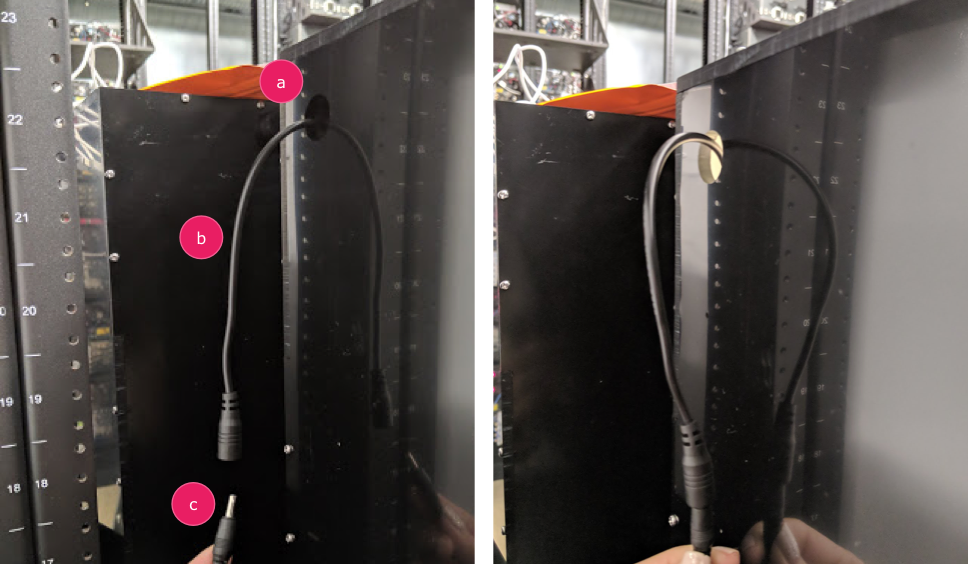
Figura 3. Cavo di conversione dell'illuminazione che esce dalla scatola e si collega al cavo di alimentazione - Foro di uscita
- Cavo di conversione
- Cavo di alimentazione
Passaggio 2: collega il servo
Per collegare il servo:
- Collega il connettore del servo al controllo del servo. Assicurati di inserire
il connettore orientato ai colori corrispondenti come indicato (G =
giallo, R = rosso, N = nero), poiché l'inversione dell'ordine potrebbe danneggiare il
motore. Se il cavo è troppo corto, utilizza un
prolunga per servo.
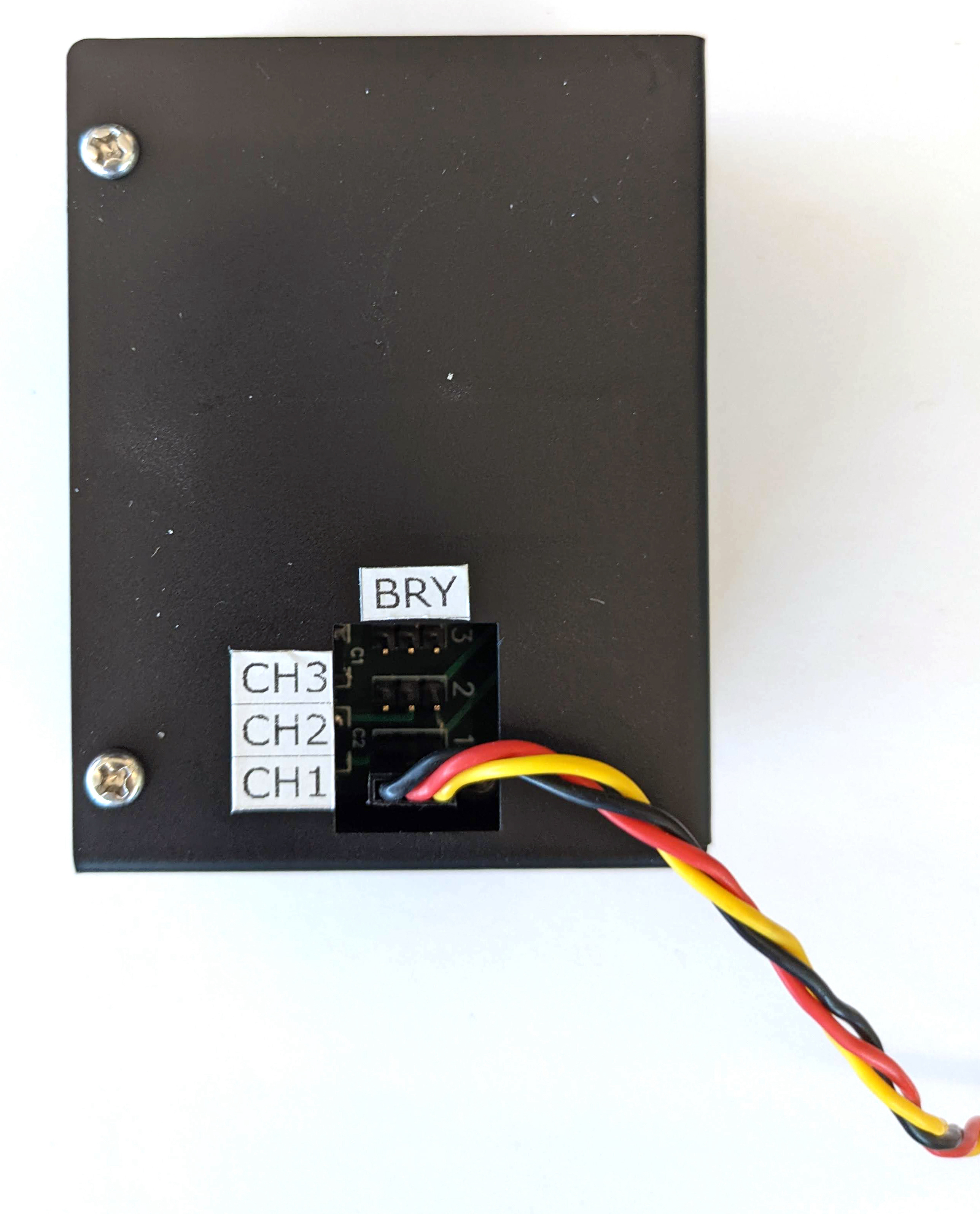
Figura 4. Servo collegato alla scatola di controllo del servo - Collega il controllo del servo con il relativo cavo di alimentazione (l'illuminazione e il controllo del servo hanno alimentazioni indipendenti e dedicate).

Figura 5. Collegamento del controllo del servo al suo cavo di alimentazione dedicato - Utilizza il cavo USB A a B per collegare la cassetta di controllo del servo all'host (la macchina su cui viene eseguito il test).
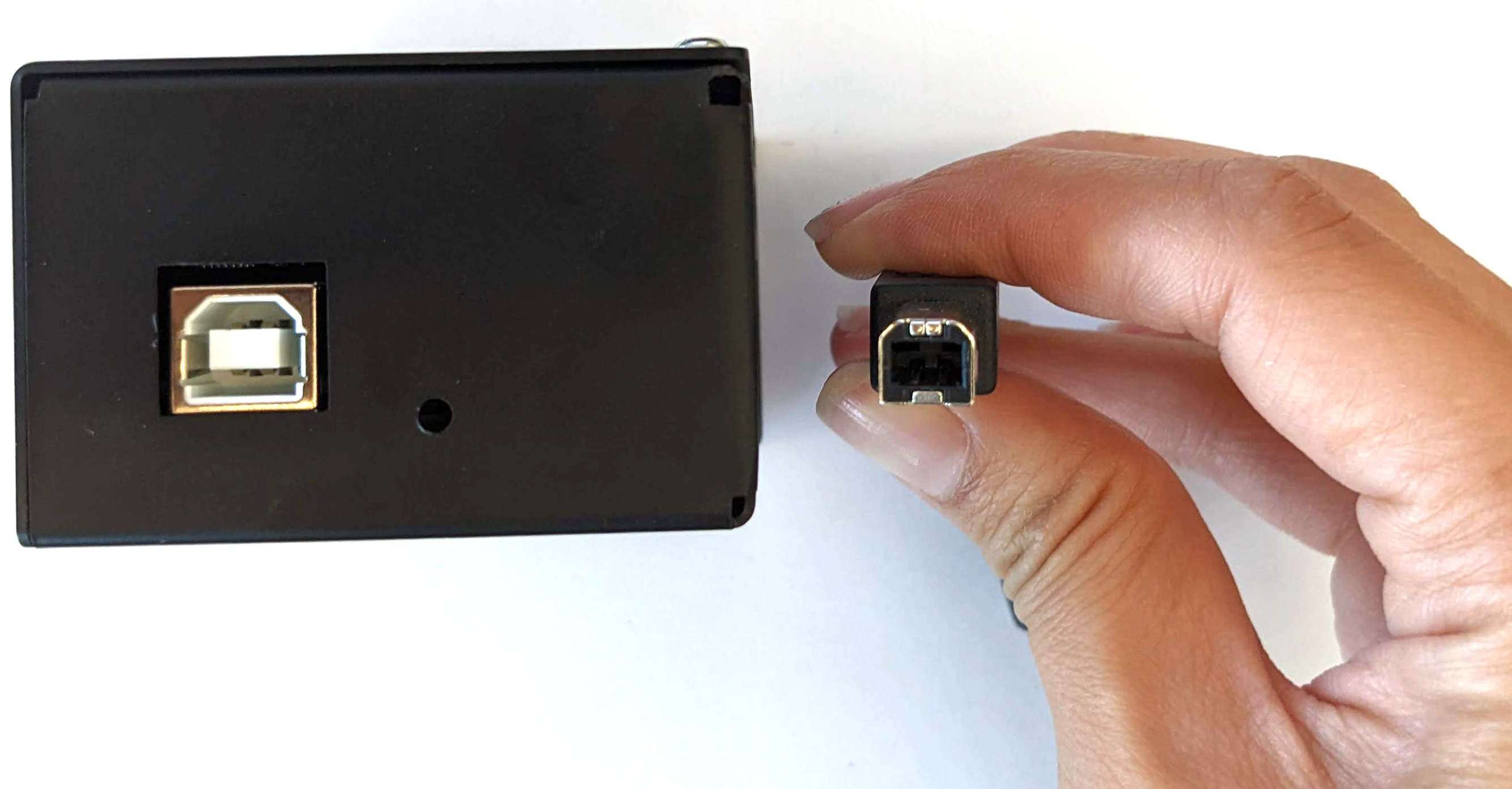
Figura 6. Collegamento della cassetta di controllo del servo alla macchina host
Passaggio 3: collega lo smartphone
- Posiziona lo smartphone sull'attacco e fissalo con il morsetto. Stringi ruotando la vite in nylon verso destra.

Figura 7. Posizionamento e bloccaggio dello smartphone sul supporto Gli smartphone devono essere posizionati in modo che i cavi USB si trovino alla periferia del supporto dello smartphone e le videocamere siano vicino al centro del supporto.
- Usa una fascetta per fissare il cavo USB dello smartphone alla piastra di montaggio e fargli fare il giro all'esterno della scatola attraverso il foro di uscita. Collega l'altra estremità
del cavo all'host che esegue il test.
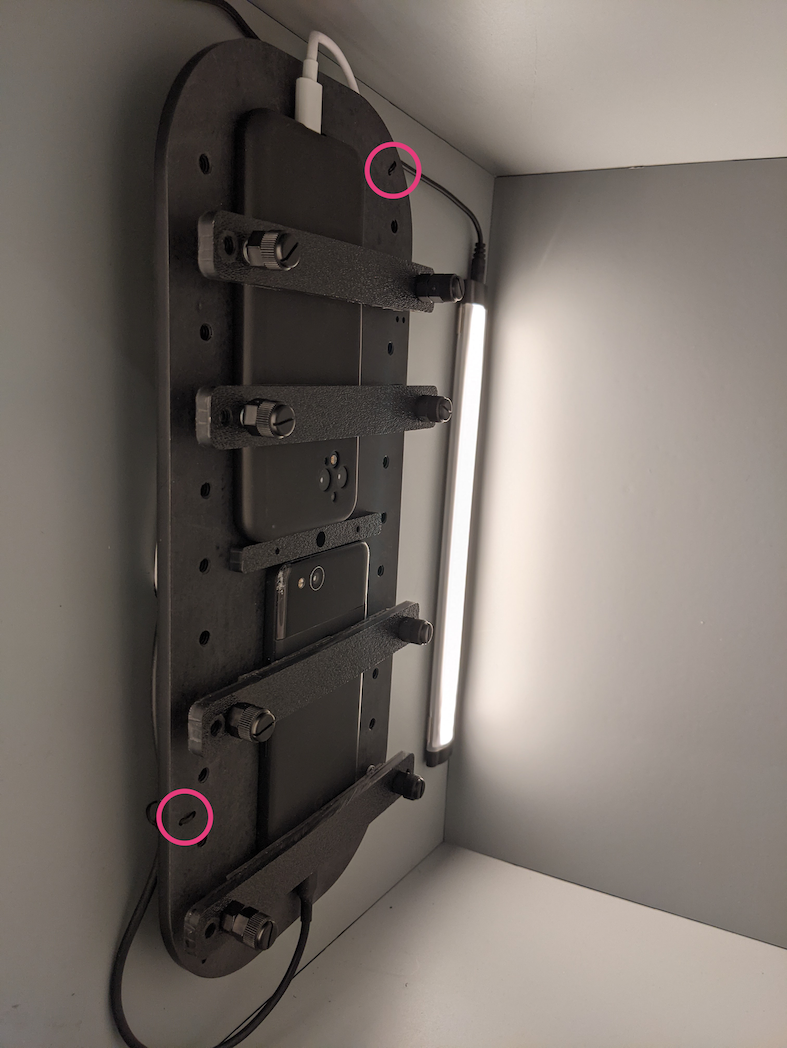
Figura 8. Cavo USB del telefono fissato alla struttura con fascette .
Passaggio 4: esegui lo script di test
L'eseguibile Python principale per lo script di test è:
python tools/run_all_tests.py device=ID camera=0 scenes=sensor_fusion rot_rig=default
Puoi modificare il comando per specificare l'indirizzo effettivo del rotatore utilizzando:
rot_rig=VID:PID:CH
- Per determinare l'ID fornitore (VID) e l'ID prodotto (PID), utilizza il comando
lsusbdi Linux. - Per impostazione predefinita, VID e PID sono impostati su
04d8efc73con il canale "1".
Più esecuzioni, formati diversi
Per eseguire più esecuzioni con formati diversi, puoi utilizzare un
script diverso (tuttavia, i risultati non verranno caricati su
CtsVerifier.apk). Script di test di esempio:
python tools/run_sensor_fusion_box.py device=FA7831A00278 camera=0 rotator=default img_size=640,360 fps=30 test_length=7Problemi di autorizzazione
Per risolvere i problemi di autorizzazione relativi al controllo del motore tramite la porta USB:
- Aggiungi il nome utente dell'operatore al gruppo
dialoututilizzando:sudo adduser USERNAME dialout - Disconnetti l'operatore.
- Accedi all'operatore.