
इस पेज पर, Android 13 कंट्रोलर को असेंबल करने का तरीका बताया गया है. यह कंट्रोलर, सेंसर फ़्यूज़न टेस्ट रिग के मूवमेंट और ITS-in-a-box की लाइटिंग को कंट्रोल करता है. सेंसर फ़्यूज़न टेस्ट, Compatibility Test Suite (CTS) में शामिल Camera Image Test Suite (Camera ITS) का हिस्सा है. Android 13 कंट्रोलर, रिग की लाइटिंग और सर्वो मोटर को कंट्रोल करके ऑटोमेशन की सुविधा देता है. इसका इस्तेमाल, रोटेशन और लाइटिंग कंट्रोल की ज़रूरत वाले टेस्ट सीन के लिए किया जाता है.
Android 13 कंट्रोलर की खास जानकारी
ITS-in-a-box, टेस्ट टैबलेट और टेस्ट फ़ोन के बीच की दूरी को तय करके, एक जैसा टेस्टिंग एनवायरमेंट उपलब्ध कराता है. इसके अलावा, यह बाहरी लाइट सोर्स के बिना एक जैसी लाइटिंग भी उपलब्ध कराता है. Android 13 कंट्रोलर, सर्वो कंट्रोल और लाइटिंग कंट्रोल, दोनों को ऑटोमेट करता है. साथ ही, सेंसर फ़्यूज़न सीन टेस्ट के लिए DUT को मैन्युअल तरीके से घुमाने और लाइटिंग-कंट्रोल वाले टेस्ट के लिए लाइटों को मैन्युअल तरीके से चालू और बंद करने की ज़रूरत को खत्म करता है.
टेस्ट रिग में सर्वो और लाइटिंग कंट्रोल
सेंसर फ़्यूज़न टेस्ट रिग, बार-बार टेस्ट करने के लिए फ़ोन के मूवमेंट को तय करता है. फ़ोन को चेकरबोर्ड टारगेट के सामने घुमाया जाता है, ताकि अलग-अलग पोज़िशन में फ़ोन से इमेज कैप्चर की जा सके. test_sensor_fusion के लिए, सर्वो, फ़ोन को कैमरा सेंटर ऑफ़ ऐक्सिस के चारों ओर 90 डिग्री पर घुमाता है और करीब दो सेकंड में वापस लाता है. test_video_stabilization के लिए, सर्वो, फ़ोन को कैमरा सेंटर ऑफ़ ऐक्सिस के चारों ओर 10 डिग्री पर घुमाता है और बार-बार वापस लाता है, ताकि चलते समय वीडियो बनाते समय फ़ोन के मूवमेंट को सिम्युलेट किया जा सके. पहली इमेज में, सेंसर फ़्यूज़न टेस्ट रिग में दो फ़ोन घूमते हुए दिखाए गए हैं. दूसरी इमेज में, सेंसर फ़्यूज़न टेस्ट रिग में एक फ़ोन घूमता हुआ दिखाया गया है.
पहली इमेज. test_sensor_fusion के लिए, टेस्ट रिग में फ़ोन का मूवमेंट

दूसरी इमेज. test_video_stabilization के लिए, टेस्ट रिग में फ़ोन का मूवमेंट
सर्वो मोटर कंट्रोल
टेस्ट रिग में मौजूद ऐनलॉग सर्वो मोटर, पोज़िशनल सर्वो होती हैं. इन्हें पल्स-विड्थ मॉड्यूलेशन (पीडब्लूएम) का इस्तेमाल करके कंट्रोल किया जाता है. पोज़िशनल कंट्रोल का एक सामान्य उदाहरण, तीसरी इमेज में दिखाया गया है. कंट्रोल सिग्नल की अवधि 20 मि॰से॰ होती है. पल्स की चौड़ाई को कम से कम चौड़ाई में बदलने पर, मोटर न्यूट्रल पोज़िशन में चली जाती है. वहीं, पल्स की चौड़ाई को ज़्यादा से ज़्यादा चौड़ाई में बदलने पर, मोटर 180 डिग्री क्लॉकवाइज़ घूम जाती है.
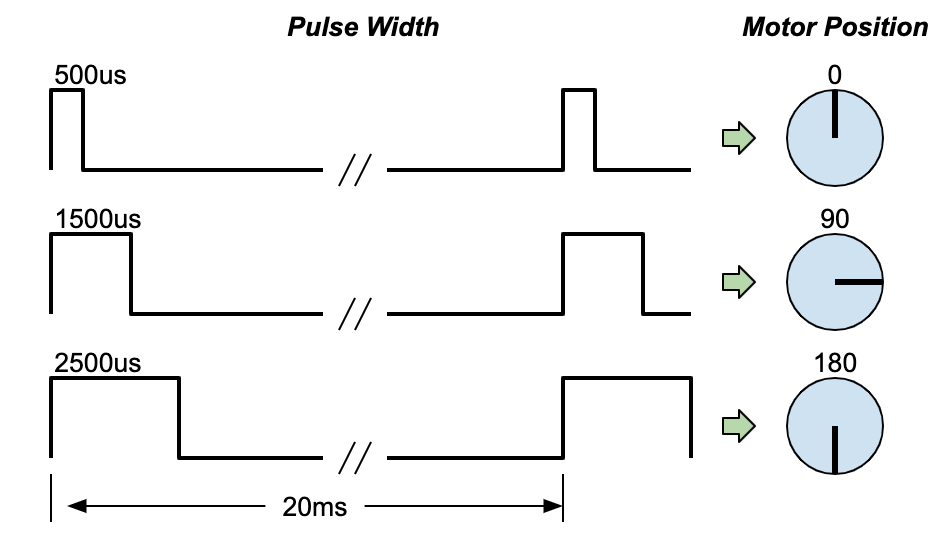
तीसरी इमेज. सर्वो कंट्रोल की सामान्य जानकारी
लाइटिंग कंट्रोल
होस्ट कंप्यूटर का इस्तेमाल करके, सर्वो मोटर के मूवमेंट और लाइटों को कंट्रोल करने के लिए, सेंसर फ़्यूज़न टेस्ट रिग को यूएसबी कनेक्शन की ज़रूरत होती है. Android 13 कंट्रोलर, यूएसबी से कनेक्ट किए गए Arduino UNO R3 बोर्ड का इस्तेमाल करता है. इसके ऊपर, कस्टम राउटिंग बोर्ड (या शील्ड) माउंट किया जाता है. Android 13 कंट्रोलर , एक होस्ट कंप्यूटर से, सेंसर फ़्यूज़न रिग के तीन रोटेटर सर्वो और ITS- in-a-box के तीन लाइटिंग सिस्टम या सेंसर फ़्यूज़न रिग को कंट्रोल कर सकता है.
Android 13 कंट्रोलर के वर्शन 3.0 से, उपयोगकर्ता, यूएसबी के ज़रिए Arduino सीरियल पोर्ट खोलने पर, ऑटो-रीसेट की सुविधा बंद कर सकते हैं. कंट्रोलर को किसी दूसरे होस्ट में प्लग करने या अन्य टेस्ट केस के लिए इस्तेमाल करने पर, ऑटो-रीसेट फ़ंक्शन चालू हो जाता है. उपयोगकर्ता, कंट्रोलर पर मौजूद फ़िज़िकल स्विच का इस्तेमाल करके, ऑटो-रीसेट की सुविधा चालू या बंद कर सकते हैं.
Android 13 कंट्रोलर, Camera ITS-in-a-box के किसी भी वर्शन के साथ काम कर सकता है. Android 13 कंट्रोलर को, लाइटिंग-कंट्रोल वाले टेस्ट करने के लिए, Camera ITS-in-a-box (RFoV, WFoV, Modular) या सेंसर फ़्यूज़न बॉक्स से कनेक्ट किया जा सकता है. Android 15 से, लाइटिंग-कंट्रोल वाले सभी टेस्ट scene_flash में शामिल हैं. इन्हें सेंसर फ़्यूज़न बॉक्स का इस्तेमाल करके चलाया जा सकता है. हालांकि, scene_low_light को छोड़कर. इसके लिए, चार्ट दिखाने के लिए टैबलेट की ज़रूरत होती है. इसे Camera ITS-in-a-box का इस्तेमाल करके चलाया जाना चाहिए.
scene_flash और scene_low_light में टेस्ट करने के लिए, अंधेरे एनवायरमेंट की ज़रूरत होती है. साथ ही, टेस्ट फ़ोन पर ऑटो फ़्लैश फ़ंक्शन को ट्रिगर करने के लिए, लाइटें बंद होनी चाहिए. चौथी इमेज में, Android 13 कंट्रोलर की मदद से, ITS-in-a-box में लाइटें बंद और चालू होती हुई दिखाई गई हैं.
चौथी इमेज. test_auto_flash के लिए, लाइटें बंद और चालू होना
बदलाव का इतिहास
यहां दी गई टेबल में, Android 13 कंट्रोलर के बदलाव के इतिहास के बारे में बताया गया है. इसमें, प्रोडक्शन फ़ाइलों के हर वर्शन के डाउनलोड लिंक भी शामिल हैं.
| तारीख | बदलाव | प्रोडक्शन फ़ाइल डाउनलोड करें | बदलाव लॉग |
|---|---|---|---|
| अगस्त 2024 | 3.0 |
|
|
| दिसंबर 2022 | 2.2 |
|
|
| मार्च 2022 | 1 |
|
Android 13 कंट्रोलर का सेटअप
इस सेक्शन में, Android 13 कंट्रोलर को सेट अप करने का तरीका बताया गया है.
ज़रूरी कॉम्पोनेंट
Android 13 कंट्रोलर को, हमारे किसी क्वालिफ़ाइड वेंडर से खरीदा जा सकता है. इसके अलावा, कंट्रोलर को खुद भी बनाया जा सकता है. प्रोडक्शन फ़ाइल में, पीसीबी Gerber फ़ाइल, पीसीबी बिल ऑफ़ मैटीरियल (बीओएम), पीसीबी प्लेसमेंट की जानकारी, और एनक्लोज़र STEP फ़ाइल शामिल होती है. प्रोडक्शन फ़ाइल डाउनलोड करने के लिए, बदलाव के इतिहास में दी गई टेबल देखें.
अगर कंट्रोलर खुद बनाया जा रहा है, तो एक Arduino UNO R3 बोर्ड होना ज़रूरी है. अगर कंट्रोलर को किसी क्वालिफ़ाइड वेंडर से खरीदा जा रहा है, तो Arduino शामिल होता है.
Android 13 कंट्रोलर एनक्लोज़र, एक ज़रूरी कॉम्पोनेंट है. हालांकि, इसे इस्तेमाल करना ज़रूरी नहीं है. यह कंट्रोलर को सुरक्षित रखता है और सेटअप में गड़बड़ियां रोकने के लिए, इस्तेमाल न किए गए यूएसबी पोर्ट को ब्लॉक कर देता है. कंट्रोलर की कीमत और विकल्पों के बारे में जानने के लिए, किसी क्वालिफ़ाइड वेंडर से संपर्क करें.
सेटअप करने की प्रोसेस
Android 13 कंट्रोलर को सेट अप करने के लिए, यह तरीका अपनाएं:
12V (लाइटिंग के लिए) और 5V (सर्वो के लिए) अडैप्टर को, सही पावर जैक से कनेक्ट करें (पांचवी इमेज).
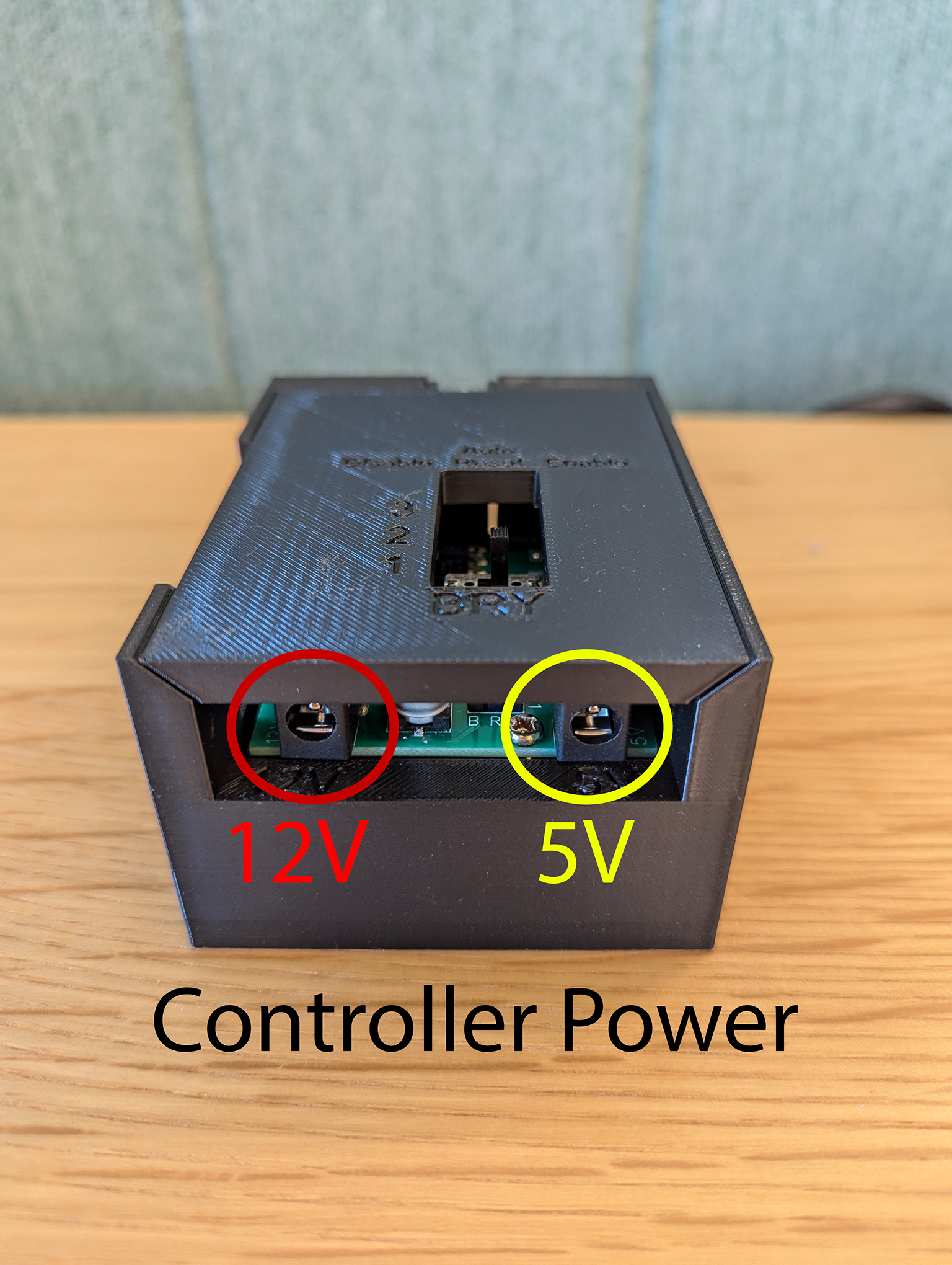
पांचवी इमेज. पावर अडैप्टर की जगह
अपने ITS-in-a-box या सेंसर फ़्यूज़न बॉक्स की लाइटों को, लाइटिंग चैनल आउटपुट जैक में से किसी एक से कनेक्ट करें (छठी इमेज). लाइटिंग पावर के बैरल के इस्तेमाल के हिसाब से, ज़रूरत के मुताबिक अडैप्टर का इस्तेमाल करें (सातवीं इमेज).

छठी इमेज. लाइटिंग चैनलों के आउटपुट की जगह

सातवीं इमेज. कंट्रोलर से लाइटिंग पावर को कनेक्ट करने वाला अडैप्टर
-

आठवीं इमेज. सर्वो कनेक्शन की जगह
वर्शन 3.0 के कंट्रोलर के लिए, कंट्रोलर को किसी नए होस्ट से कनेक्ट करते समय, ऑटो रीसेट स्विच को
Enableपर सेट करना ज़रूरी है.वर्शन 3.0 के कंट्रोलर में, ऑटो रीसेट स्विच शामिल है. इसे चालू या बंद किया जा सकता है. टेस्टिंग के दौरान, हमारा सुझाव है कि ऑटो रीसेट स्विच को
Disableपर सेट करें, ताकि हर टेस्ट की शुरुआत में सभी लाइटें कुछ समय के लिए बंद न हों. ऐसा इसलिए, क्योंकिits_base_test, Arduino कंट्रोलर के साथ कम्यूनिकेशन बनाता है. पैरलल टेस्टिंग (एक ही कंट्रोलर से कनेक्ट किए गए टेस्ट रिग लाइटिंग सिस्टम के साथ-साथ ITS का चलना) के दौरान, यह ज़रूरी है.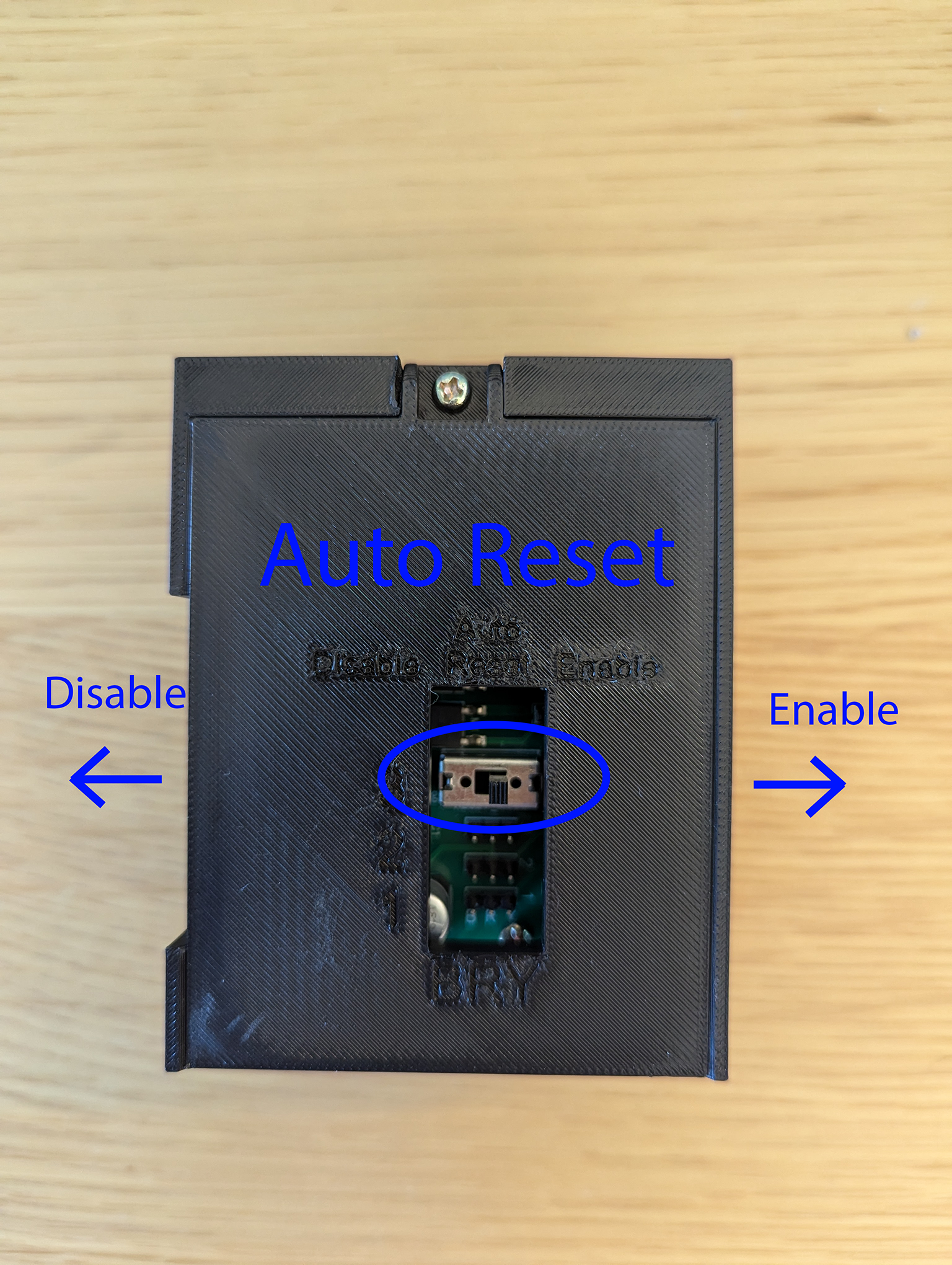
नौवीं इमेज. ऑटो रीसेट स्विच
कंट्रोलर को यूएसबी-ए केबल की मदद से होस्ट से कनेक्ट करें.

10वीं इमेज. होस्ट से कनेक्ट करने के लिए, यूएसबी-ए कनेक्शन पोर्ट
11वीं इमेज में, एक लाइटिंग सिस्टम और सर्वो के लिए, Android 13 कंट्रोलर के सेटअप का एक उदाहरण दिखाया गया है.
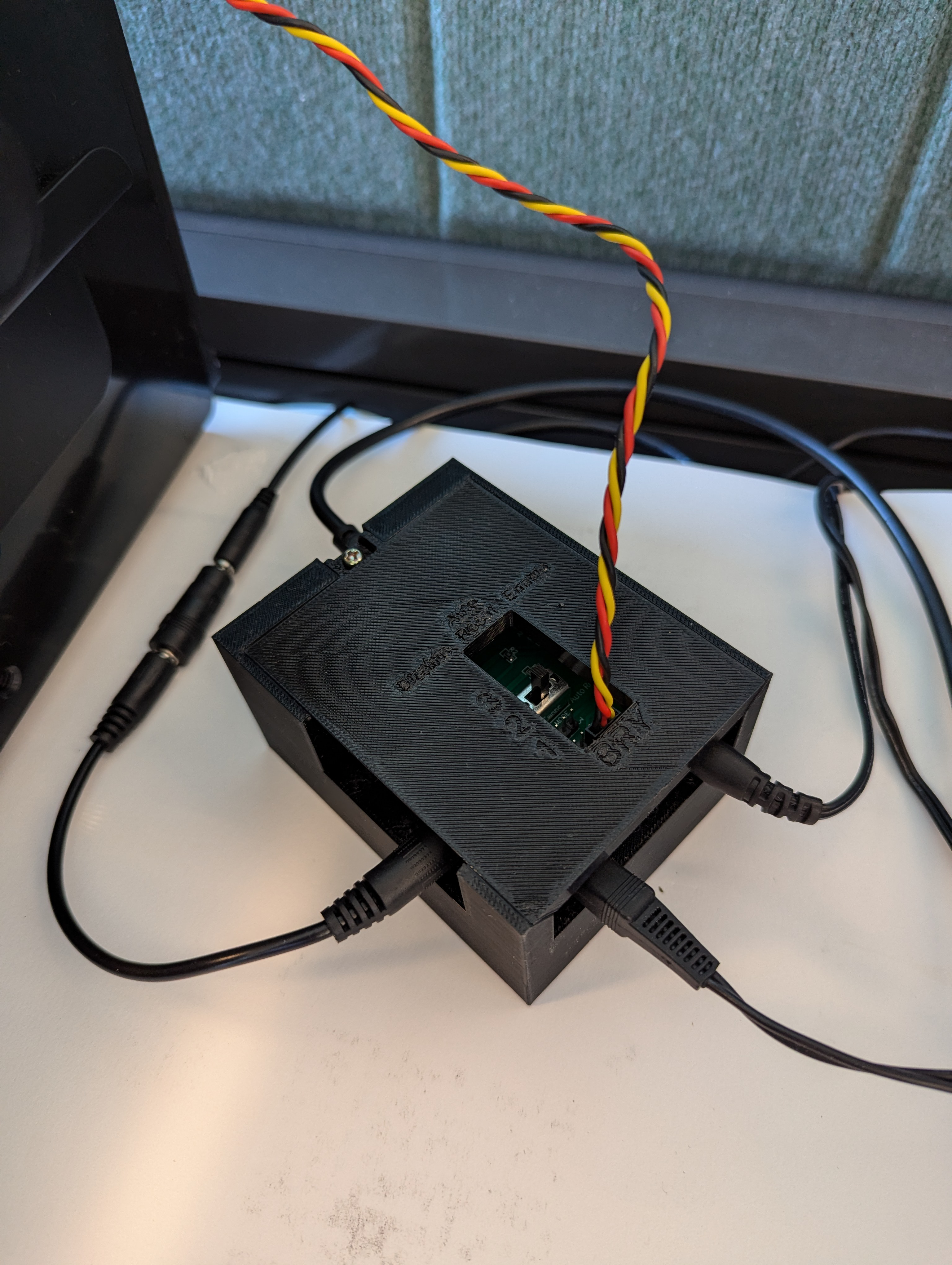
11वीं इमेज. Android 13 कंट्रोलर का सेटअप पूरा हुआ
होस्ट से सॉफ़्टवेयर कंट्रोल
UNO में माइक्रो-कोड डाउनलोड किया जा सकता है, ताकि पीडब्लूएम पिन को मोटर सिग्नल असाइन किए जा सकें और अलग-अलग ऐंगल के लिए पल्स-विड्थ रेंज तय की जा सकें. छह HS-755MB मोटर के सर्वो रोटेशन कंट्रोल के लिए माइक्रो-कोड
,
अन्य संसाधनों में शामिल है. उस सेक्शन में, rotator.py नाम के एक आसान प्रोग्राम का लिंक भी शामिल है. यह प्रोग्राम, सर्वो को रोटेट करता है.
Android 13 कंट्रोलर का इस्तेमाल करना
Camera ITS का इस्तेमाल:
python tools/run_all_tests.py device=device_id camera=0 rot_rig=arduino:1 scenes=sensor_fusion
शामिल टेस्ट स्क्रिप्ट के साथ:
python rotator.py --ch 1 --dir ON --debug