
Trang này mô tả cách lắp ráp bộ điều khiển Android 13, bộ điều khiển này kiểm soát chuyển động cho giàn kiểm thử hợp nhất cảm biến và ánh sáng cho ITS-in-a-box. Bài kiểm thử kết hợp cảm biến là một phần của Bộ kiểm thử hình ảnh của camera (Camera ITS) trong Bộ kiểm tra tính tương thích (CTS). Bộ điều khiển Android 13 cho phép tự động hoá bằng cách điều khiển hệ thống chiếu sáng và động cơ servo cho các cảnh thử nghiệm yêu cầu xoay và điều khiển ánh sáng.
Tổng quan về bộ điều khiển Android 13
ITS-in-a-box cung cấp một môi trường kiểm thử nhất quán với khoảng cách cố định giữa máy tính bảng kiểm thử và điện thoại kiểm thử, ngoài ra còn có ánh sáng nhất quán mà không cần nguồn sáng bên ngoài. Bộ điều khiển Android 13 tự động hoá cả việc điều khiển servo và điều khiển ánh sáng, đồng thời loại bỏ nhu cầu xoay DUT theo cách thủ công cho các thử nghiệm cảnh kết hợp cảm biến và bật/tắt đèn theo cách thủ công cho các thử nghiệm được kiểm soát ánh sáng.
Servo và thiết bị kiểm soát chiếu sáng trong giàn thử nghiệm
Thiết bị kiểm thử kết hợp cảm biến cung cấp chuyển động cố định của điện thoại để kiểm thử có thể tái tạo. Điện thoại được xoay trước một mục tiêu bàn cờ để cho phép chụp ảnh bằng điện thoại ở nhiều vị trí. Đối với test_sensor_fusion, servo sẽ xoay điện thoại quanh tâm trục camera 90 độ rồi quay lại trong khoảng 2 giây. Đối với test_video_stabilization, servo sẽ xoay điện thoại quanh tâm camera theo trục 10 độ và quay lại nhiều lần để mô phỏng chuyển động của điện thoại khi quay video trong lúc đi bộ. Hình 1 cho thấy 2 điện thoại di chuyển trong một giàn kiểm thử hợp nhất cảm biến. Hình 2 cho thấy một điện thoại đang di chuyển trong thiết bị kiểm thử hợp nhất cảm biến.
Hình 1. Chuyển động của điện thoại trong thiết bị kiểm thử cho test_sensor_fusion
Hình 2. Chuyển động của điện thoại trong giàn thử nghiệm cho test_video_stabilization
Điều khiển động cơ servo
Động cơ servo tương tự trong giàn thử nghiệm là các servo vị trí được điều khiển bằng phương pháp điều chế độ rộng xung (PWM). Hình 3 minh hoạ một ví dụ điển hình về chế độ điều khiển vị trí. Tín hiệu điều khiển có chu kỳ là 20 ms. Việc thay đổi độ rộng xung thành độ rộng tối thiểu sẽ di chuyển động cơ đến vị trí trung lập và việc thay đổi độ rộng xung thành độ rộng tối đa sẽ di chuyển động cơ 180 độ theo chiều kim đồng hồ.
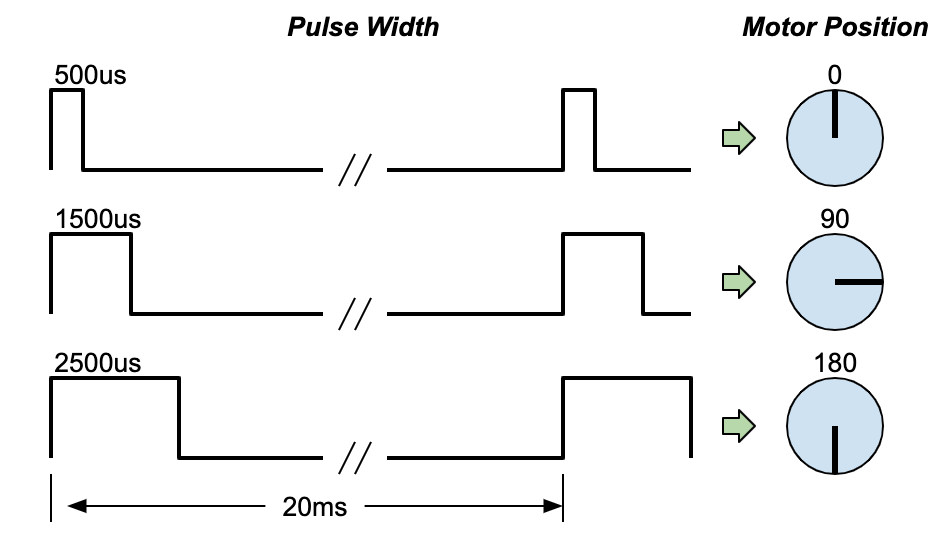
Hình 3. Nội dung mô tả thông thường về chế độ điều khiển servo
Điều khiển đèn
Để điều khiển chuyển động và đèn của động cơ servo bằng máy tính lưu trữ, thiết bị kiểm thử hợp nhất cảm biến cần có kết nối USB. Bộ điều khiển Android 13 sử dụng một bo mạch Arduino UNO R3 kết nối qua USB với một bo mạch định tuyến tuỳ chỉnh (hoặc vỏ bảo vệ) được gắn ở trên cùng. Bộ điều khiển Android 13 có thể điều khiển tối đa 3 servo bộ xoay giàn hợp nhất cảm biến và tối đa 3 hệ thống chiếu sáng ITS-in-a-box hoặc một giàn hợp nhất cảm biến từ một máy chủ duy nhất.
Bộ điều khiển Android 13 phiên bản 3.0 cho phép người dùng tắt tính năng tự động đặt lại khi cổng nối tiếp Arduino được mở qua USB. Chức năng tự động đặt lại được bật khi bộ điều khiển được cắm vào một máy chủ lưu trữ khác hoặc đang được dùng cho các trường hợp kiểm thử khác. Người dùng có thể bật hoặc tắt tính năng tự động đặt lại bằng cách sử dụng một công tắc vật lý trên bộ điều khiển.
Bộ điều khiển Android 13 có thể hoạt động với mọi Camera ITS-in-a-box. Bạn có thể kết nối bộ điều khiển Android 13 với bất kỳ hộp Camera ITS-in-a-box (RFoV, WFoV, Modular) hoặc hộp Sensor Fusion nào để tiến hành các kiểm thử được kiểm soát ánh sáng. Từ Android 15, tất cả các kiểm thử có kiểm soát ánh sáng đều có trong scene_flash và có thể chạy bằng hộp kết hợp cảm biến, ngoại trừ scene_low_light. Kiểm thử này yêu cầu máy tính bảng để hiển thị biểu đồ và phải chạy bằng Camera ITS-in-a-box.
Đối với các bài kiểm thử trong scene_flash và scene_low_light, bạn cần có môi trường tối và tắt đèn để kích hoạt chức năng đèn flash tự động trên điện thoại kiểm thử. Hình 4 cho thấy bộ điều khiển Android 13 đang bật và tắt đèn trong ITS-in-a-box.
Hình 4. Đèn bật và tắt để kiểm tra tính năng test_auto_flash
Nhật ký sửa đổi
Bảng sau đây mô tả nhật ký sửa đổi của bộ điều khiển Android 13 và bao gồm các đường liên kết tải xuống cho từng phiên bản của tệp sản xuất.
| Ngày | Bản sửa đổi | Tải tệp sản xuất xuống | Nhật ký thay đổi |
|---|---|---|---|
| Tháng 8 năm 2024 | 3 |
|
|
| Tháng 12 năm 2022 | 2.2 |
|
|
| Tháng 3 năm 2022 | 1 |
|
Thiết lập tay điều khiển trên Android 13
Phần này mô tả cách thiết lập bộ điều khiển Android 13.
Thành phần bắt buộc
Bạn có thể mua bộ điều khiển Android 13 thông qua một trong những nhà cung cấp đủ tiêu chuẩn của chúng tôi hoặc tự xây dựng bộ điều khiển. Tệp sản xuất bao gồm tệp Gerber PCB, danh sách vật liệu (BOM) PCB, thông tin về vị trí PCB và tệp STEP của vỏ. Để tải tệp sản xuất xuống, hãy xem bảng trong phần Nhật ký sửa đổi.
Nếu đang tự xây dựng bộ điều khiển, bạn phải có bo mạch Arduino UNO R3. Nếu bạn mua bộ điều khiển thông qua một nhà cung cấp đủ tiêu chuẩn, thì Arduino sẽ được đi kèm.
Vỏ bộ điều khiển Android 13 là một thành phần không bắt buộc nhưng bạn nên dùng để bảo vệ bộ điều khiển và chặn các cổng USB không dùng đến nhằm ngăn lỗi thiết lập. Để biết thông tin chi tiết về giá và các lựa chọn cho bộ điều khiển, hãy liên hệ với một nhà cung cấp đủ tiêu chuẩn.
Quy trình thiết lập
Để thiết lập bộ điều khiển Android 13, hãy làm theo các bước sau:
Kết nối bộ chuyển đổi 12V (để chiếu sáng) và 5V (cho servo) với giắc cắm nguồn thích hợp (Hình 5).
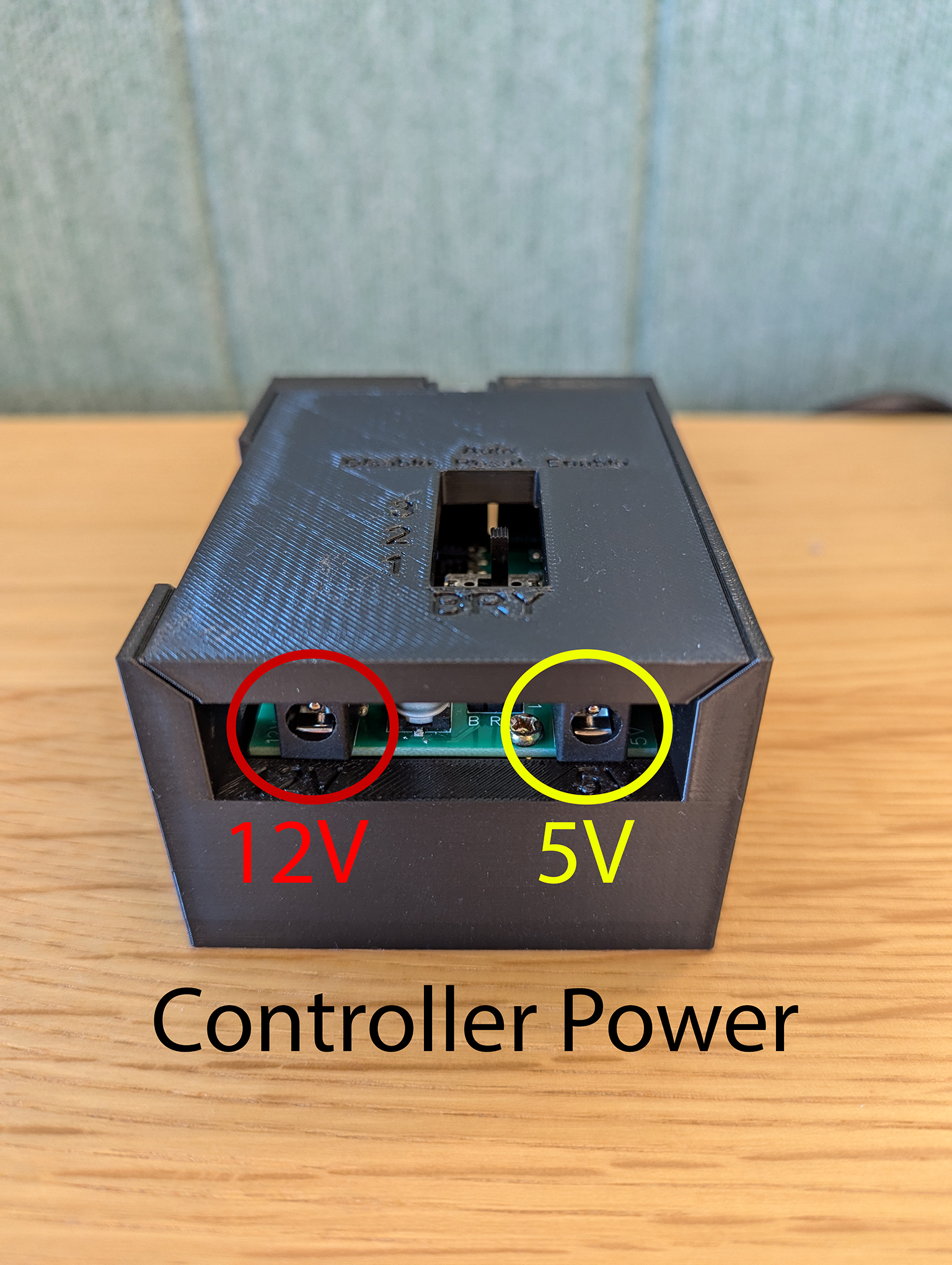
Hình 5. Vị trí của bộ sạc
Kết nối đèn ITS-in-a-box hoặc Sensor Fusion box với một trong các giắc cắm đầu ra của kênh chiếu sáng (Hình 6). Tuỳ thuộc vào đầu cắm của nguồn điện chiếu sáng, hãy sử dụng bộ chuyển đổi nếu cần (Hình 7).

Hình 6. Vị trí đầu ra của các kênh chiếu sáng

Hình 7. Bộ chuyển đổi kết nối nguồn điện chiếu sáng với bộ điều khiển
Để thiết lập cảnh kết hợp cảm biến, hãy kết nối servo với một trong các đầu kết nối kênh servo.

Hình 8. Vị trí kết nối của servo
Đối với bộ điều khiển phiên bản 3.0, khi kết nối bộ điều khiển với một máy chủ lưu trữ mới, bạn phải đặt công tắc đặt lại tự động thành
Enable.Đối với phiên bản 3.0, bộ điều khiển có một công tắc đặt lại tự động mà bạn có thể bật hoặc tắt. Khi kiểm thử, bạn nên đặt công tắc đặt lại tự động thành
Disableđể ngăn tất cả đèn tắt trong giây lát khi bắt đầu mỗi lần kiểm thử vìits_base_testthiết lập giao tiếp với bộ điều khiển Arduino. Điều này rất quan trọng khi chạy kiểm thử song song (ITS chạy đồng thời với hệ thống chiếu sáng của giàn kiểm thử được kết nối với cùng một bộ điều khiển).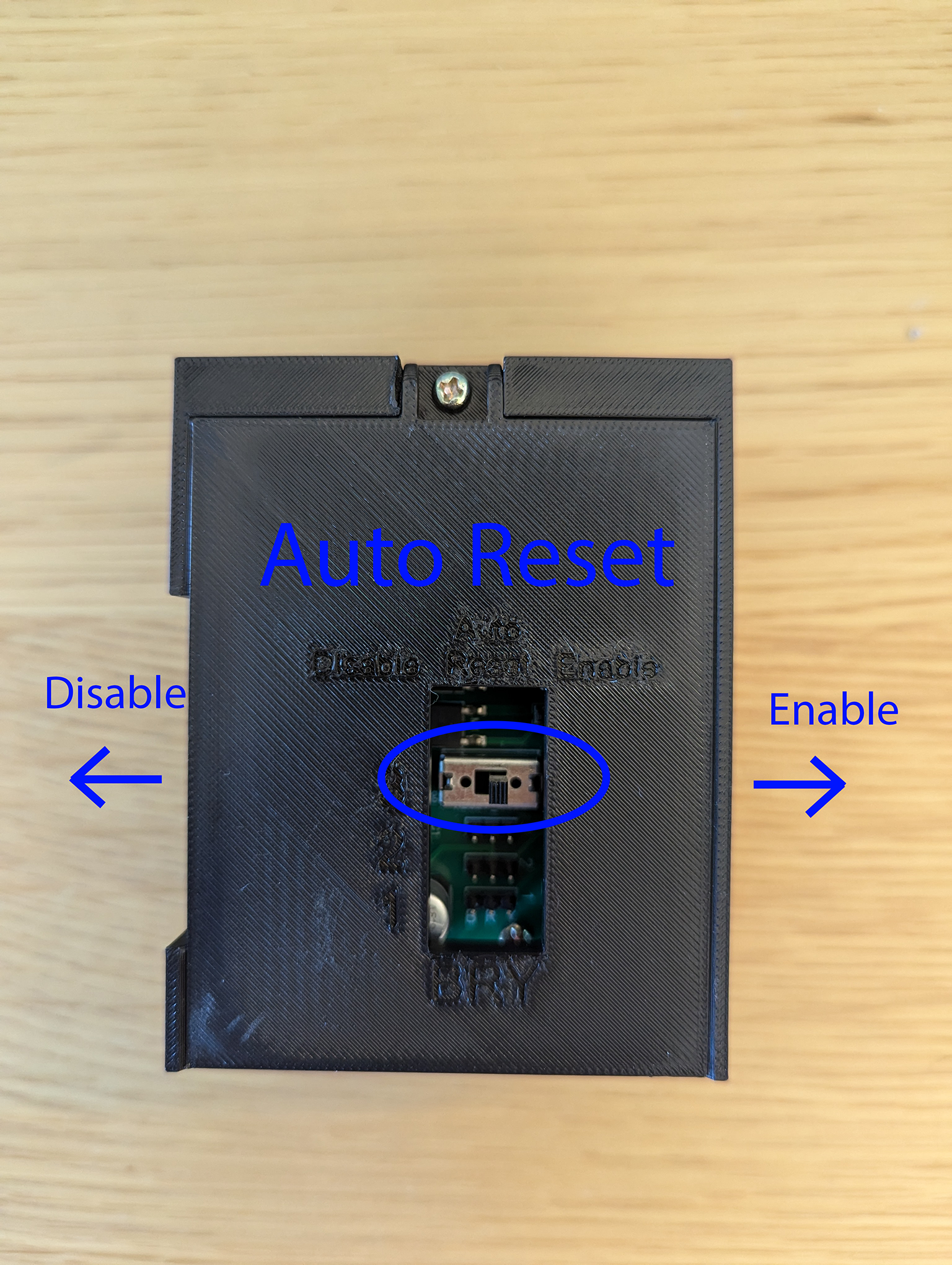
Hình 9. Công tắc tự động đặt lại
Kết nối bộ điều khiển với máy chủ bằng cáp USB-A.

Hình 10. Cổng kết nối USB-A với máy chủ
Hình 11 minh hoạ ví dụ về chế độ thiết lập bộ điều khiển Android 13 đã hoàn tất cho một hệ thống chiếu sáng và servo.
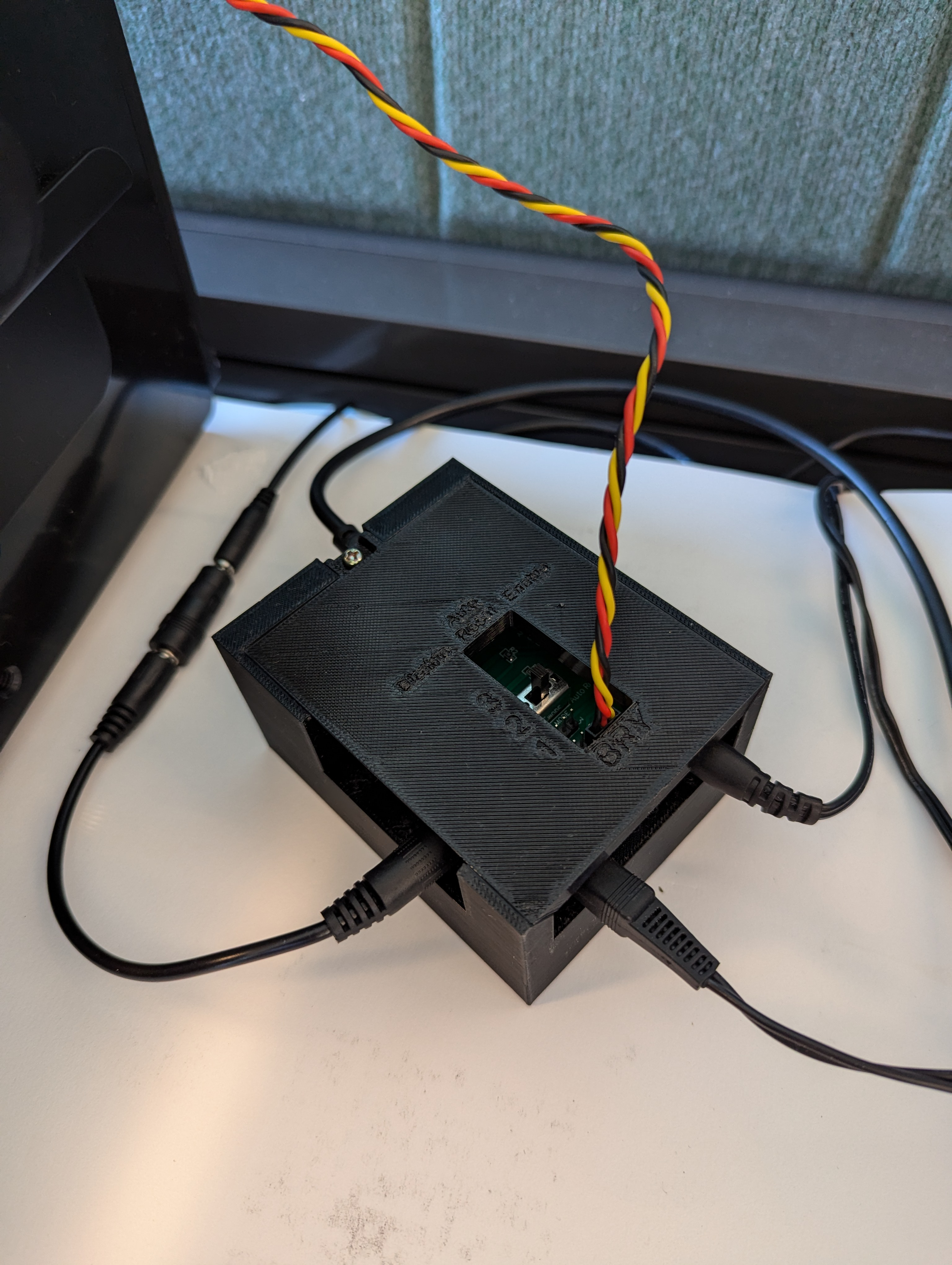
Hình 11. Đã hoàn tất quá trình thiết lập tay điều khiển Android 13
Người tổ chức điều khiển phần mềm
Bạn có thể tải mã vi mô xuống UNO để chỉ định các chân PWM cho tín hiệu động cơ và xác định dải độ rộng xung cho các góc khác nhau. Mã vi mô để điều khiển chuyển động quay của 6 động cơ HS-755MB được đưa vào phần Tài nguyên khác. Phần đó cũng có một đường liên kết đến một chương trình đơn giản có tên là rotator.py, chương trình này sẽ xoay các servo.
Sử dụng bộ điều khiển Android 13
Cách sử dụng ITS của camera:
python tools/run_all_tests.py device=device_id camera=0 rot_rig=arduino:1 scenes=sensor_fusion
Với kịch bản kiểm tra đi kèm:
python rotator.py --ch 1 --dir ON --debug