
Les fabricants d'appareils sont généralement considérés comme les propriétaires des ressources privées créées pour chaque appareil. Par conséquent, leurs efforts d'ingénierie sont souvent axés sur chaque appareil, et peu ou pas d'efforts sont déployés pour assurer la cohérence des autres appareils de l'écosystème.
À l'inverse, les développeurs s'efforcent de créer des applications qui fonctionnent sur tous les téléphones Android de l'écosystème, quelles que soient les spécifications techniques de chaque appareil. Cette différence d'approche peut entraîner un problème de fragmentation. Par exemple, les capacités matérielles de certains téléphones ne correspondent pas aux attentes des développeurs d'applications. Ainsi, si les API haptiques fonctionnent sur certains téléphones Android, mais pas sur d'autres, l'écosystème est incohérent. C'est pourquoi la configuration matérielle joue un rôle essentiel pour s'assurer que les fabricants peuvent implémenter les API haptiques Android sur tous les appareils.
Cette page fournit une checklist détaillée pour configurer la conformité matérielle afin d'optimiser l'utilisation des API haptiques Android.
La figure suivante illustre la création de connaissances communes entre les fabricants d'appareils et les développeurs, ce qui est une étape essentielle pour créer un écosystème cohérent :
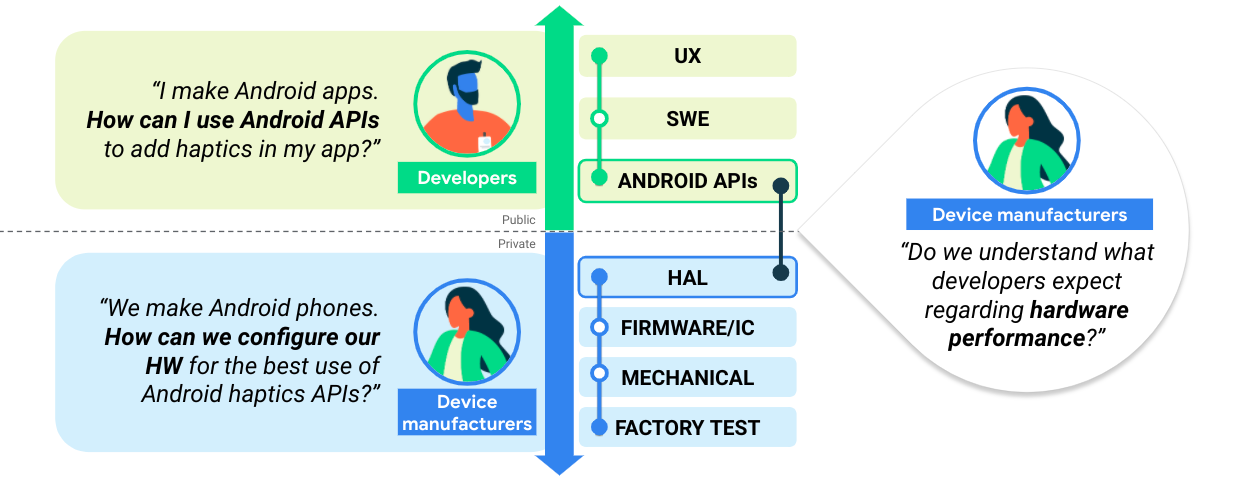
Figure 1. Créer des connaissances entre les fabricants d'appareils et les développeurs
Checklist d'implémentation des API haptiques
-
- Liste des constantes pour implémenter les technologies haptiques.
-
- Conseils d'implémentation pour les primitives de composition HAL.
Mapper les constantes entre HAL et l'API
- Recommandations de mappage entre les constantes d'API publiques (appelées espaces réservés dans le framework) et les constantes HAL, qui implémentent les espaces réservés.
- Pour en savoir plus sur ce processus, consultez Principes de conception pour guider le mappage recommandé.
Implémenter des effets d'enveloppe linéaire par morceaux (PWLE)
- Conseils d'implémentation pour les enveloppes d'amplitude et de fréquence.
-
- Instructions sur les effets haptiques cibles. Suivez ces instructions pour effectuer des vérifications rapides sur votre matériel.