
Producenci urządzeń są na ogół uważani za właścicieli zasobów prywatnych utworzonych dla każdego urządzenia. Dlatego ich wysiłki inżynieryjne często koncentrują się na poszczególnych urządzeniach, a niewiele lub wcale nie poświęcają uwagi spójności innych urządzeń w ekosystemie.
Z drugiej strony deweloperzy starają się tworzyć aplikacje, które działają na wszystkich telefonach z Androidem w ekosystemie, niezależnie od specyfikacji technicznej każdego urządzenia. Ta różnica w podejściu może powodować problem fragmentacji. Na przykład możliwości sprzętowe niektórych telefonów nie spełniają oczekiwań deweloperów aplikacji. Jeśli interfejsy API haptyki działają na niektórych telefonach z Androidem, ale nie na innych, ekosystem jest niespójny. Dlatego konfiguracja sprzętu odgrywa kluczową rolę w zapewnieniu, że producenci mogą implementować interfejsy API haptyki Androida na każdym urządzeniu.
Na tej stronie znajdziesz listę kontrolną z instrukcjami krok po kroku, która pomoże Ci skonfigurować zgodność sprzętu, aby jak najlepiej wykorzystać interfejsy API haptyki Androida.
Na ilustracji poniżej przedstawiono budowanie wspólnej wiedzy między producentami urządzeń a deweloperami, co jest kluczowym krokiem w tworzeniu spójnego ekosystemu:
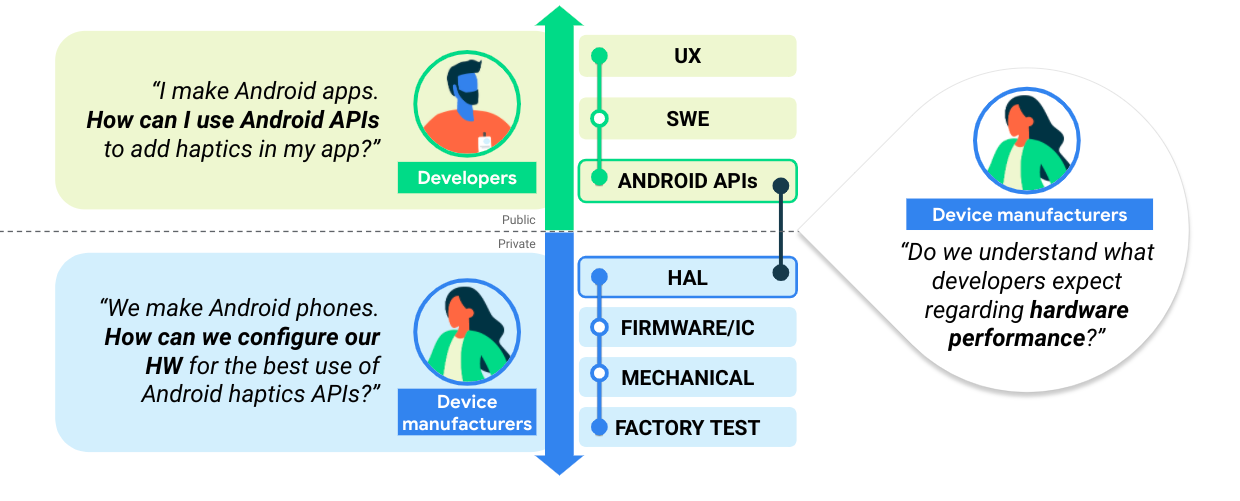
Rysunek 1. Budowanie wiedzy między producentami urządzeń a deweloperami
Lista kontrolna implementacji haptyki
-
- Lista stałych do implementowania haptyki.
Implementowanie elementów podstawowych
- Wskazówki dotyczące implementacji elementów podstawowych kompozycji HAL.
Mapowanie stałych między HAL a interfejsem API
- Zalecenia dotyczące mapowania między stałymi publicznego interfejsu API (w frameworku nazywanymi symbolami zastępczymi) a stałymi HAL, które implementują symbole zastępcze.
- Więcej informacji o tym procesie znajdziesz w artykule Zasady projektowania, które pomogą Ci w zalecanym mapowaniu.
Implementowanie efektów PWLE (piecewise linear envelope)
- Wskazówki dotyczące implementacji obwiedni amplitudy i częstotliwości.
-
- Instrukcje dotyczące docelowych efektów haptycznych. Postępuj zgodnie z tymi instrukcjami, aby szybko sprawdzić sprzęt.