
VSYNC 信号可同步显示管道。显示流水线由应用渲染、SurfaceFlinger 合成以及用于在屏幕上显示图像的硬件混合渲染器 (HWC) 组成。VSYNC 可同步应用唤醒以开始渲染的时间、SurfaceFlinger 唤醒以合成屏幕的时间以及屏幕刷新周期。这种同步可以消除卡顿,并提升图形的视觉表现。
HWC 可生成 VSYNC 事件并通过回调将事件发送到 SurfaceFlinger:
typedef void (*HWC2_PFN_VSYNC)(hwc2_callback_data_t callbackData, hwc2_display_t display, int64_t timestamp);
SurfaceFlinger 通过调用 setVsyncEnabled 来控制 HWC 是否生成 VSYNC 事件。SurfaceFlinger 使 setVsyncEnabled 能够生成 VSYNC 事件,因此它可以与屏幕的刷新周期同步。当 SurfaceFlinger 同步到屏幕刷新周期时,SurfaceFlinger 会停用 setVsyncEnabled 以阻止 HWC 生成 VSYNC 事件。如果 SurfaceFlinger 检测到实际 VSYNC 与它先前建立的 VSYNC 之间存在差异,则 SurfaceFlinger 会重新启动 VSYNC 事件生成过程。
VSYNC 偏移
同步应用和 SurfaceFlinger 会将循环渲染到硬件 VSYNC。在 VSYNC 事件中,屏幕开始显示帧 N,而 SurfaceFlinger 开始为帧 N+1 合成窗口。应用处理等待的输入并生成帧 N+2。
与 VSYNC 同步会实现一致的延迟时间。它可以减少应用和 SurfaceFlinger 中的错误,并最大限度减小相位内外屏幕之间的偏移。这要假定应用和 SurfaceFlinger 的每帧时间没有很大变化。延迟至少为两帧。
为了解决此问题,您可以通过使应用和合成信号与硬件 VSYNC 相关,从而利用 VSYNC 偏移减少输入设备到屏幕的延迟。这是有可能的,因为应用加合成通常需要不到 33 毫秒的时间。
VSYNC 偏移的结果是具有相同周期和偏移相位的三个信号:
HW_VSYNC_0- 屏幕开始显示下一帧。VSYNC- 应用读取输入内容并生成下一帧。SF_VSYNC- SurfaceFlinger 开始为下一帧进行合成。
通过 VSYNC 偏移,SurfaceFlinger 接收缓冲区并合成帧,而应用同时处理输入内容并渲染帧。
DispSync
DispSync 维护屏幕基于硬件的周期性 VSYNC 事件的模型,并使用该模型在硬件 VSYNC 事件的特定相位偏移处执行回调。
DispSync 是一个软件锁相回路 (PLL),它可以生成由 Choreographer 和 SurfaceFlinger 使用的 VSYNC 和 SF_VSYNC 信号,即使没有来自硬件 VSYNC 的偏移也是如此。
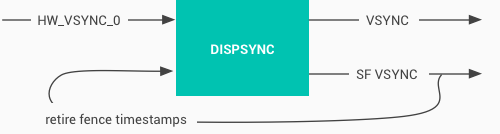
图 1. DispSync 流程
DispSync 具有以下特点:
- 参考 - HW_VSYNC_0。
- 输出 - VSYNC 和 SF_VSYNC。
- 反馈 - 自硬件混合渲染器的退出栅栏有信号状态时间戳。
VSYNC/退出偏移
退出栅栏的有信号状态时间戳必须与 HW VSYNC 相符,即使在不使用偏移相位的设备上也是如此。否则,实际造成的错误会更加严重。智能面板通常有一个增量:退出栅栏是对显示内存进行直接内存访问 (DMA) 的终点,但是实际的显示切换和 HW VSYNC 会晚一段时间。
PRESENT_TIME_OFFSET_FROM_VSYNC_NS 在设备的 BoardConfig.mk makefile 中设置。它取决于屏幕控制器和面板特性。从退出栅栏时间戳到 HW VSYNC 信号的时间以纳秒为单位进行测量。
VSYNC 和 SF_VSYNC 偏移
VSYNC_EVENT_PHASE_OFFSET_NS 和 SF_VSYNC_EVENT_PHASE_OFFSET_NS 根据高负载使用情形进行了保守设置,例如在窗口过渡期间进行部分 GPU 合成或 Chrome 滚动显示包含动画的网页。这些偏移允许较长的应用渲染时间和较长的 GPU 合成时间。
超过一两毫秒的延迟时间是非常明显的。为了最大限度地缩短延迟时间而不显著增加错误计数,请集成彻底的自动化错误测试。