
יצרני המכשירים נחשבים בדרך כלל לבעלים של הנכסים הפרטיים שנוצרו לכל מכשיר. לכן, מאמצי הפיתוח שלהם מתמקדים בדרך כלל בכל מכשיר בנפרד, ולא מושקעים מאמצים רבים (אם בכלל) כדי להבטיח עקביות בין מכשירים אחרים באותו אקוסיסטם.
לעומת זאת, מפתחים שואפים ליצור אפליקציות שפועלות בכל טלפוני Android באקוסיסטם, בלי קשר למפרט הטכני של כל מכשיר. ההבדל הזה בגישה עלול לגרום לבעיות פיצול. לדוגמה, יכול להיות שהיכולות של החומרה בטלפונים מסוימים לא תואמות לציפיות שהגדירו מפתחי האפליקציה. לכן, אם ממשקי ה-API של הפידבק ההפטי פועלים בחלק מהטלפונים עם Android אבל לא באחרים, התוצאה היא מערכת אקולוגית לא עקבית. לכן, הגדרת החומרה ממלאת תפקיד חשוב מאוד בהבטחה שיצרנים יוכלו להטמיע ממשקי API של Android לרטט בכל מכשיר.
בדף הזה מופיעה רשימת משימות מפורטת להגדרת תאימות חומרה כדי להפיק את המרב מממשקי ה-API של Android לרטט.
האיור הבא מדגים את בניית הידע המשותף בין יצרני המכשירים לבין המפתחים, שהוא שלב קריטי ביצירת מערכת אקולוגית מגובשת:
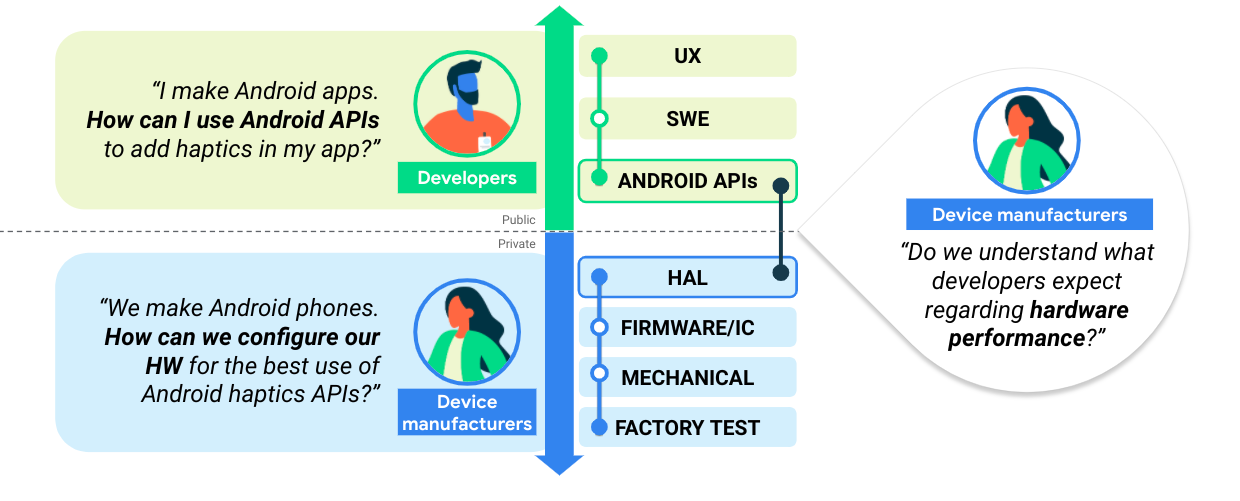
איור 1. בניית ידע בין יצרני מכשירים לבין מפתחים
רשימת משימות לביצוע בנושא הטמעת מגע
-
- רשימה של קבועים להטמעת משוב מישוש.
-
- הנחיות להטמעה של פרימיטיבים של יצירה מוזיקלית ב-HAL.
-
- המלצות למיפוי בין קבועים של API ציבורי (שנקראים placeholders ב-framework) לבין קבועים של HAL שמטמיעים את ה-placeholders.
- מידע נוסף על תהליך המיפוי המומלץ
הטמעה של אפקטים של מעטפת ליניארית מקטעית (PWLE)
- הנחיות להטמעה של מעטפות אמפליטודה ותדירות.
-
- הוראות לגבי אפקטים של משוב מישושי. ההוראות הבאות יעזרו לכם לבצע בדיקות מהירות של החומרה.