
Esta seção descreve eixos de sensores, sensores básicos e sensores compostos (atividade, atitude, não calibrado e interação).
Eixos do sensor
Os valores de eventos de sensores de muitos sensores são expressos em um frame específico que é estático em relação ao dispositivo.
Eixos de dispositivos móveis
A API Sensor é relativa apenas à orientação natural da tela. Os eixos não são trocados quando a orientação da tela do dispositivo muda.

Figura 1. Sistema de coordenadas (em relação a um dispositivo móvel) usado pela API Sensor.
Eixos automotivos
Nas implementações do Android Automotive, os eixos são definidos em relação ao chassi do veículo. A origem do referencial do veículo é o centro do eixo traseiro. O frame de referência do veículo é orientado para que:
- O eixo X aponta para a direita e está em um plano horizontal, perpendicular ao plano de simetria do veículo.
- O eixo Y aponta para frente e está em um plano horizontal.
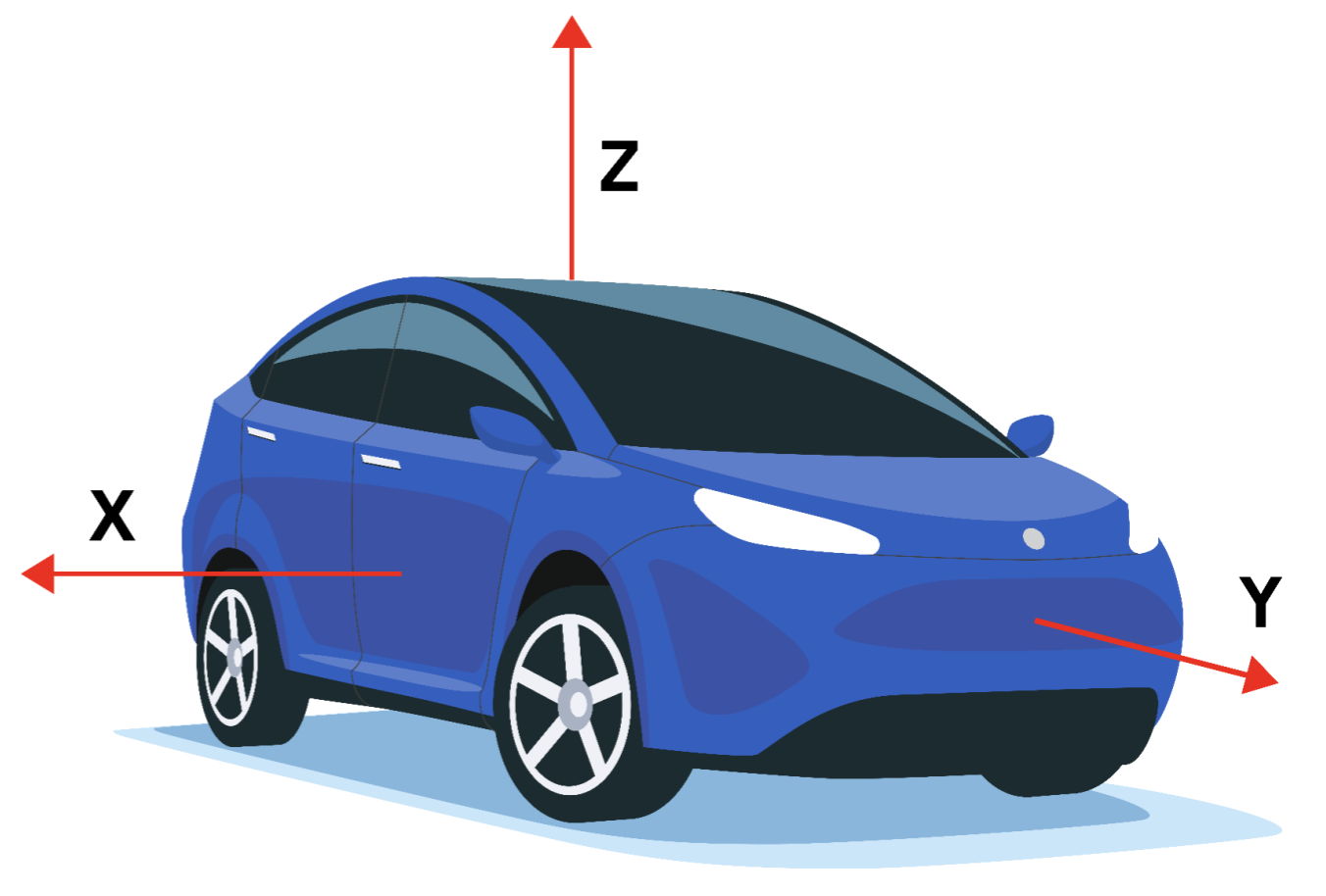
Figura 2. Sistema de coordenadas (em relação a um dispositivo automotivo) usado pela API Sensor
O marco de referência do veículo é um sistema de coordenadas com orientação para a direita. Portanto, o eixo Z aponta para cima.
O eixo Z do marco de referência está alinhado à gravidade, o que significa que os eixos X e Y são horizontais. Como resultado, o eixo Y nem sempre passa pelo eixo dianteiro.
Sensores de base
Os tipos de sensores básicos são nomeados de acordo com os sensores físicos que representam. Esses sensores transmitem dados de um único sensor físico, em vez de sensores compostos que geram dados de outros sensores. Exemplos de tipos de sensores básicos incluem:
SENSOR_TYPE_ACCELEROMETERSENSOR_TYPE_GYROSCOPESENSOR_TYPE_MAGNETOMETER
No entanto, os sensores básicos não são iguais e não devem ser confundidos com o sensor físico subjacente. Os dados de um sensor base não são a saída bruta do sensor físico porque correções (como compensação de viés e de temperatura) são aplicadas.
Por exemplo, as características de um sensor base podem ser diferentes das características do sensor físico subjacente nos seguintes casos de uso:
- Um chip de giroscópio com uma faixa de viés de 1 deg/s.
- Depois que a calibração de fábrica, a compensação de temperatura e a compensação de viés são aplicadas, o viés real do sensor do Android é reduzido, talvez para um ponto em que o viés é garantido abaixo de 0,01 graus/s.
- Nessa situação, dizemos que o sensor do Android tem uma viés abaixo de 0,01 deg/s, mesmo que a folha de dados do sensor indique 1 deg/s.
- Um barômetro com consumo de energia de 100 uW.
- Como os dados gerados precisam ser transportados do chip para o SoC, o custo de energia real para coletar dados do sensor de barômetro do Android pode ser muito maior, por exemplo, 1.000 uW.
- Nessa situação, dizemos que o sensor do Android tem um consumo de energia de 1.000 uW, mesmo que o consumo de energia medido nos fios do chip do barômetro seja de 100 uW.
- Um magnetômetro que consome 100uW quando calibrado, mas consome mais durante a
calibragem.
- A rotina de calibração pode exigir a ativação do giroscópio, consumindo 5.000 uW, e a execução de algum algoritmo, custando mais 900 uW.
- Nessa situação, dizemos que o consumo máximo de energia do sensor Android (magnetômetro) é de 6.000 uW.
- Nesse caso, o consumo de energia médio é a medida mais útil, e é o que é informado nas características estáticas do sensor pelo HAL.
Acelerômetro
Modo de relatório: Contínuo
getDefaultSensor(SENSOR_TYPE_ACCELEROMETER)
retorna um sensor que não ativa
Um sensor de acelerômetro informa a aceleração do dispositivo ao longo dos três eixos do sensor. A aceleração medida inclui a aceleração física (mudança de velocidade) e a gravidade. A medição é informada nos campos x, y e z de sensors_event_t.acceleration.
Todos os valores estão em unidades SI (m/s^2) e medem a aceleração do dispositivo menos a força da gravidade ao longo dos três eixos do sensor.
Confira alguns exemplos:
- A norma de (x, y, z) precisa estar próxima de 0 em queda livre.
- Quando o dispositivo está plano sobre uma mesa e é empurrado do lado esquerdo para o direito, o valor da aceleração x é positivo.
- Quando o dispositivo está plano sobre uma mesa, o valor de aceleração ao longo de z é +9,81 alo, que corresponde à aceleração do dispositivo (0 m/s^2) menos a força da gravidade (-9,81 m/s^2).
- Quando o dispositivo está plano sobre uma mesa e é empurrado em direção ao céu, o valor da aceleração é maior que +9,81, o que corresponde à aceleração do dispositivo (+A m/s^2) menos a força da gravidade (-9,81 m/s^2).
As leituras são calibradas usando:
- Compensação de temperatura
- Calibração de viés on-line
- Calibração de balança on-line
A calibração de viés e escala só pode ser atualizada enquanto o sensor está desativado, para evitar saltos nos valores durante o streaming.
O acelerômetro também informa a precisão esperada para as leituras
usando sensors_event_t.acceleration.status. Consulte as constantes
SensorManager
SENSOR_STATUS_* para mais informações sobre os possíveis
valores desse campo.
Temperatura ambiente
Modo de relatório: mudanças
getDefaultSensor(SENSOR_TYPE_AMBIENT_TEMPERATURE)
retorna um sensor que não ativa
Esse sensor fornece a temperatura ambiente (do local) em graus Celsius.
Sensor de campo magnético
Modo de relatório: Contínuo
getDefaultSensor(SENSOR_TYPE_MAGNETIC_FIELD)
retorna um sensor que não ativa
SENSOR_TYPE_GEOMAGNETIC_FIELD == SENSOR_TYPE_MAGNETIC_FIELD
Um sensor de campo magnético (também conhecido como magnetômetro) informa o campo magnético do ambiente, conforme medido ao longo dos três eixos do sensor.
A medição é informada nos campos x, y e z de
sensors_event_t.magnetic, e todos os valores estão em microtesla (uT).
O magnetômetro também informa a precisão esperada para as leituras
usando sensors_event_t.magnetic.status. Consulte as constantes
SensorManager
SENSOR_STATUS_* para mais informações sobre os possíveis
valores desse campo.
As leituras são calibradas usando:
- Compensação de temperatura
- Calibração de ferro macio de fábrica (ou on-line)
- Calibração de hardware on-line
Giroscópio
Modo de relatório: Contínuo
getDefaultSensor(SENSOR_TYPE_GYROSCOPE)
retorna um sensor que não ativa
Um sensor de giroscópio informa a taxa de rotação do dispositivo em torno dos três eixos do sensor.
A rotação é positiva no sentido anti-horário (regra da mão direita). Ou seja, um observador que observa de um local positivo nos eixos x, y ou z de um dispositivo posicionado na origem informaria uma rotação positiva se o dispositivo parecesse estar girando no sentido anti-horário. Essa é a definição matemática padrão de rotação positiva e não concorda com a definição aeroespacial de guinada.
A medição é informada nos campos x, y e z de
sensors_event_t.gyro
e todos os valores estão em radianos por segundo (rad/s).
As leituras são calibradas usando:
- Compensação de temperatura
- Compensação de escala de fábrica (ou on-line)
- Calibração de viés on-line (para remover a deriva)
O giroscópio também informa a precisão esperada para as leituras usando
sensors_event_t.gyro.status. Consulte as constantes
SensorManager
SENSOR_STATUS_* para mais informações sobre os possíveis
valores desse campo.
O giroscópio não pode ser emulado com base em magnetômetros e acelerômetros, porque isso reduziria a consistência e a capacidade de resposta local. Ele precisa ser baseado em um chip de giroscópio comum.
Frequência cardíaca
Modo de relatório: mudanças
getDefaultSensor(SENSOR_TYPE_HEART_RATE)
retorna um sensor que não ativa
Um sensor de frequência cardíaca informa a frequência cardíaca atual da pessoa que toca no dispositivo.
A frequência cardíaca atual em batimentos por minuto (BPM) é informada em
sensors_event_t.heart_rate.bpm, e o status do sensor é
informado em
sensors_event_t.heart_rate.status. Consulte as constantes
SensorManager
SENSOR_STATUS_* para mais informações sobre os possíveis
valores desse campo. Em
particular, na primeira ativação, a menos que o dispositivo não esteja no
corpo, o campo de status do primeiro evento precisa ser definido como
SENSOR_STATUS_UNRELIABLE. Como esse sensor está em mudança,
os eventos são gerados quando e somente quando heart_rate.bpm ou
heart_rate.status mudaram desde o último evento. Os eventos
são gerados a cada sampling_period.
O framework substitui automaticamente sensor_t.requiredPermission para
a permissão adequada para manter a compatibilidade. O framework usa a
permissão SENSOR_PERMISSION_READ_HEART_RATE para
o Android 16 e versões mais recentes e a
permissão SENSOR_PERMISSION_BODY_SENSORS para o Android 15 e versões anteriores.
Claro
Modo de relatório: ao mudar
getDefaultSensor(SENSOR_TYPE_LIGHT)
retorna um sensor que não ativa
Um sensor de luz informa a iluminação atual em unidades de lux do SI.
A medição é informada em sensors_event_t.light.
Proximidade
Modo de relatório: ao mudar
Geralmente definido como um sensor de ativação
getDefaultSensor(SENSOR_TYPE_PROXIMITY)
retorna um sensor de ativação
Um sensor de proximidade informa a distância entre o sensor e a superfície visível mais próxima.
Até o Android 4.4, os sensores de proximidade eram sempre sensores de ativação, ativando o SoC ao detectar uma mudança na proximidade. Após o Android 4.4, recomendamos implementar primeiro a versão de ativação desse sensor, porque é ela que é usada para ligar e desligar a tela ao fazer ligações.
A medição é informada em centímetros em
sensors_event_t.distance. Alguns sensores de proximidade só oferecem suporte a uma medição binária "próximo" ou "longe".
Nesse caso, o sensor informa o valor sensor_t.maxRange
no estado "longe"
e um valor menor que sensor_t.maxRange no
estado "perto".
Pressão
Modo de relatório: Contínuo
getDefaultSensor(SENSOR_TYPE_PRESSURE)
retorna um sensor que não ativa
Um sensor de pressão (também conhecido como barômetro) informa a pressão atmosférica em hectopascais (hPa).
As leituras são calibradas usando
- Compensação de temperatura
- Calibração de viés de fábrica
- Calibração da escala de fábrica
O barômetro é usado com frequência para estimar mudanças de elevação. Para estimar a elevação absoluta, a pressão ao nível do mar (que muda de acordo com o clima) precisa ser usada como referência.
Umidade relativa
Modo de relatório: ao mudar
getDefaultSensor(SENSOR_TYPE_RELATIVE_HUMIDITY)
retorna um sensor que não ativa
Um sensor de umidade relativa mede a umidade relativa do ar ambiente e retorna um valor em porcentagem.
Tipos de sensores compostos
Um sensor composto gera dados processando e/ou mesclando dados de um ou vários sensores físicos. Qualquer sensor que não seja um sensor base é chamado de sensor composto. Exemplos de sensores compostos incluem:
- Detector de passos e movimento significativo, que geralmente são baseados em um acelerômetro, mas também podem ser baseados em outros sensores, se o consumo de energia e a precisão forem aceitáveis.
- Vetor de rotação do jogo, baseado em um acelerômetro e um giroscópio.
- Giroscópio não calibrado, que é semelhante ao sensor de base do giroscópio, mas com a calibração de viés sendo informada separadamente em vez de ser corrigida na medição.
Assim como os sensores básicos, as características dos sensores compostos vêm das características dos dados finais. Por exemplo, o consumo de energia de um vetor de rotação de jogo provavelmente é igual à soma dos consumos de energia do chip do acelerômetro, do giroscópio, do chip que processa os dados e dos barramentos que transportam os dados. Como outro exemplo, a deriva de um vetor de rotação de jogo depende tanto da qualidade do algoritmo de calibração quanto das características do sensor físico.
A tabela a seguir lista os tipos de sensores compostos disponíveis. Cada sensor composto depende de dados de um ou vários sensores físicos. Evite escolher outros sensores físicos para aproximar os resultados, porque eles oferecem uma experiência de usuário ruim.
| Tipo de sensor | Categoria | Sensores físicos subjacentes | Modo de relatório |
|---|---|---|---|
Atitude |
Acelerômetro, giroscópio, NÃO USE o magnetômetro |
Contínuo |
|
Atitude |
Acelerômetro, magnetômetro, NÃO USE o giroscópio |
Contínuo |
|
| Gesto de Glance |
Interação |
Indefinido |
One-shot |
Atitude |
Acelerômetro, giroscópio (se presente) ou magnetômetro (se o giroscópio não estiver presente) |
Contínuo |
|
Não calibrado |
Giroscópio |
Contínuo |
|
Atividade |
Acelerômetro, giroscópio (se presente) ou magnetômetro (se o giroscópio não estiver presente) |
Contínuo |
|
Não calibrado |
Magnetômetro |
Contínuo |
|
Orientação (descontinuado) |
Atitude |
Acelerômetro, magnetômetro, giroscópio (se houver) |
Contínuo |
Interação |
Indefinido |
One-shot |
|
Atitude |
Acelerômetro, magnetômetro, giroscópio (se houver) |
Contínuo |
|
Atividade |
Acelerômetro (ou outro, desde que tenha consumo muito baixo) |
One-shot |
|
Atividade |
Acelerômetro |
Ao mudar |
|
Atividade |
Acelerômetro |
Especial |
|
Atividade |
Acelerômetro |
Especial |
|
Interação |
Indefinido |
One-shot |
![]() = Sensor de pouca energia
= Sensor de pouca energia
Sensores compostos de atividade
Aceleração linear
Sensores físicos subjacentes: acelerômetro e (se presente) giroscópio (ou magnetômetro, se o giroscópio não estiver presente)
Modo de relatório: contínuo
getDefaultSensor(SENSOR_TYPE_LINEAR_ACCELERATION)
retorna um sensor que não ativa
Um sensor de aceleração linear informa a aceleração linear do dispositivo no frame do sensor, sem incluir a gravidade.
Conceitualmente, a saída é a saída do sensor de aceleração menos a saída do sensor de gravidade. Ele é informado em m/s^2 nos campos x, y e z
de sensors_event_t.acceleration.
As leituras em todos os eixos devem estar próximas de 0 quando o dispositivo estiver imóvel.
Se o dispositivo tiver um giroscópio, o sensor de aceleração linear precisará usar o giroscópio e o acelerômetro como entrada.
Se o dispositivo não tiver um giroscópio, o sensor de aceleração linear vai precisar usar o acelerômetro e o magnetômetro como entrada.
Movimento significativo
Sensor físico subjacente: acelerômetro (ou outro, desde que de baixo consumo)
Modo de relatório: One-shot
Baixo consumo energético
Implemente apenas a versão de ativação desse sensor.
getDefaultSensor(SENSOR_TYPE_SIGNIFICANT_MOTION)
retorna um sensor de ativação
Um detector de movimento significativo é acionado quando detecta um movimento significativo: um movimento que pode levar a uma mudança no local do usuário.
Exemplos de movimentos significativos:
- A pé ou de bicicleta
- Sentado em um carro, ônibus ou trem em movimento
Exemplos de situações que não acionam um movimento significativo:
- O smartphone está no bolso e a pessoa não está se movendo
- O smartphone está em uma mesa e ela balança um pouco devido ao tráfego ou à máquina de lavar perto
Em um nível alto, o detector de movimento significativo é usado para reduzir o consumo de energia da determinação de local. Quando os algoritmos de localização detectam que o dispositivo está estático, eles podem alternar para um modo de baixo consumo de energia, em que dependem de um movimento significativo para ativar o dispositivo quando o usuário está mudando de local.
Esse sensor precisa ter baixo consumo de energia. Ele faz uma troca de consumo de energia que pode resultar em uma pequena quantidade de falsos negativos. Isso é feito por alguns motivos:
- O objetivo desse sensor é economizar energia.
- Acionar um evento quando o usuário não está se movendo (falso positivo) é caro em termos de energia, então ele precisa ser evitado.
- Não acionar um evento quando o usuário está se movendo (falso negativo) é aceitável, desde que não seja feito repetidamente. Se o usuário estiver andando há 10 segundos, não acionar um evento nesses 10 segundos não é aceitável.
Cada evento do sensor informa 1 em sensors_event_t.data[0].
Detector de passos
Sensor físico subjacente: acelerômetro (e possivelmente outros, desde que de baixa potência)
Modo de relatório: especial (um evento por etapa realizada)
Baixo consumo energético
getDefaultSensor(SENSOR_TYPE_STEP_DETECTOR)
retorna um sensor que não ativa
Um detector de etapas gera um evento sempre que o usuário dá uma etapa.
O carimbo de data/hora do evento sensors_event_t.timestamp corresponde
ao momento em que o pé toca o chão, gerando uma grande variação na aceleração.
Em comparação com o pedômetro, o detector de passos tem uma latência menor (menos de dois segundos). O detector de passos e o pedômetro detectam quando o usuário está andando, correndo e subindo escadas. Elas não podem ser acionadas quando o usuário está andando de bicicleta, dirigindo ou em outros veículos.
Esse sensor precisa ter baixo consumo de energia. Ou seja, se a detecção de etapas não puder ser feita no hardware, esse sensor não será definido. Especificamente, quando o detector de etapas está ativado e o acelerômetro não está, apenas as etapas devem acionar interrupções (não todas as leituras do acelerômetro).
sampling_period_ns não afeta os detectores de passos.
Cada evento do sensor informa 1 em sensors_event_t.data[0].
Contador de passos
Sensor físico subjacente: acelerômetro (e possivelmente outros, desde que de baixa potência)
Modo de relatório: ao mudar
Baixo consumo energético
getDefaultSensor(SENSOR_TYPE_STEP_COUNTER)
retorna um sensor que não ativa
Um contador de passos informa o número de passos dados pelo usuário desde a última reinicialização enquanto ativado.
A medição é informada como uint64_t em
sensors_event_t.step_counter e
é redefinida para zero apenas na reinicialização do sistema.
O carimbo de data/hora do evento é definido como a hora em que a última etapa dele foi realizada.
Consulte o tipo de sensor Detector de etapa para saber o significado do tempo de uma etapa.
Em comparação com o detector de passos, o pedômetro pode ter uma latência maior (até 10 segundos). Graças a essa latência, esse sensor tem uma alta precisão. A contagem de passos após um dia inteiro de medições deve estar dentro de 10% da contagem real. O detector de passos e o pedômetro detectam quando o usuário está caminhando, correndo e subindo as escadas. Elas não podem ser acionadas quando o usuário estiver andando de bicicleta, dirigindo ou em outros veículos.
O hardware precisa garantir que a contagem interna de etapas nunca transborde. O tamanho mínimo do contador interno do hardware precisa ser de 16 bits. Em caso de transbordamento iminente (a cada aproximadamente 2^16 etapas), o SoC pode ser ativado para que o driver faça a manutenção do contador.
Conforme declarado em Interação, enquanto esse sensor estiver em operação, ele não vai interromper outros sensores, em particular, o acelerômetro, que pode estar em uso.
Se um dispositivo específico não oferecer suporte a esses modos de operação, esse tipo de sensor não poderá ser informado pelo HAL. Ou seja, não é aceitável "emular" esse sensor no HAL.
Esse sensor precisa ter baixo consumo de energia. Ou seja, se a detecção de passos não puder ser feita no hardware, esse sensor não será definido. Especificamente, quando o contador de passos é ativado e o acelerômetro não, apenas os passos podem acionar interrupções (não dados do acelerômetro).
Detector de inclinação
Sensor físico subjacente: acelerômetro (e possivelmente outros, desde que de baixa potência)
Modo de relatório: Especial
Baixo consumo energético
Implemente apenas a versão de ativação desse sensor.
getDefaultSensor(SENSOR_TYPE_TILT_DETECTOR)
retorna um sensor de ativação
Um detector de inclinação gera um evento sempre que um evento de inclinação é detectado.
Um evento de inclinação é definido pela direção da média da janela de dois segundos de gravidade mudando pelo menos 35 graus desde a ativação ou o último evento gerado pelo sensor. Este é o algoritmo:
reference_estimated_gravity= média das medições do acelerômetro no primeiro segundo após a ativação ou a gravidade estimada quando o último evento de inclinação foi gerado.current_estimated_gravity= média das medições do sensor de aceleração nos últimos 2 segundos.- Acionar quando
angle(reference_estimated_gravity, current_estimated_gravity) > 35 degrees
Acelerações grandes sem uma mudança na orientação do smartphone não devem acionar um
evento de inclinação. Por exemplo, uma curva fechada ou uma aceleração forte ao dirigir um
carro não deve acionar um evento de inclinação, mesmo que o ângulo da aceleração
média possa variar em mais de 35 graus.
Normalmente, esse sensor é
implementado com a ajuda de apenas um acelerômetro. Outros sensores também podem ser usados
se não aumentarem o consumo de energia de forma significativa. Esse é um
sensor de baixo consumo de energia que permite que o SoC entre no modo de suspensão. Não
emule esse sensor no HAL. Cada evento do sensor informa 1 em
sensors_event_t.data[0].
Sensores compostos de atitude
Vetor de rotação
Sensores físicos subjacentes: acelerômetro, magnetômetro e giroscópio
Modo de relatório: contínuo
getDefaultSensor(SENSOR_TYPE_ROTATION_VECTOR) retorna um
sensor que não ativa
Um sensor de vetor de rotação informa a orientação do dispositivo em relação ao frame de coordenadas leste-norte-cima. Geralmente, é obtida pela integração de leituras de acelerômetro, giroscópio e magnetômetro. O sistema de coordenadas leste-norte-cima é definido como uma base ortonormal direta em que:
- O X aponta para o leste e é tangente ao solo.
- O eixo Y aponta para o norte e é tangente ao solo.
- O eixo Z aponta para o céu e é perpendicular ao solo.
A orientação do smartphone é representada pela rotação necessária para alinhar as coordenadas leste-norte-cima com as coordenadas do smartphone. Ou seja, aplicar a rotação ao frame do mundo (X,Y,Z) as alinharia com as coordenadas do smartphone (x,y,z).
A rotação pode ser vista como a rotação do smartphone em um ângulo de 360 graus em torno de um
eixo rot_axis para passar da orientação de referência (orientação alinhada leste-norte-cima)
para
a orientação atual do dispositivo. A rotação é codificada como os quatro componentes
x, y, z, w sem unidade de um quatérnion de unidade:
sensors_event_t.data[0] = rot_axis.x*sin(theta/2)sensors_event_t.data[1] = rot_axis.y*sin(theta/2)sensors_event_t.data[2] = rot_axis.z*sin(theta/2)sensors_event_t.data[3] = cos(theta/2)
Em que:
- Os campos x, y e z de
rot_axissão as coordenadas leste-norte-cima de um vetor de comprimento unitário que representa o eixo de rotação. thetaé o ângulo de rotação
O quatérnion é um quatérnion unitário: ele precisa ter norma 1.
Se isso não for feito,
o comportamento do cliente será irregular.
Além disso, esse sensor informa uma precisão de direção estimada:
sensors_event_t.data[4] = estimated_accuracy (em radianos)
O erro do título precisa ser menor que estimated_accuracy 95% do
tempo. Esse sensor precisa usar um giroscópio como a entrada principal de mudança de orientação.
Esse sensor também usa a entrada do acelerômetro e do magnetômetro para compensar a deriva do giroscópio e não pode ser implementado usando apenas o acelerômetro e o magnetômetro.
Vetor de rotação do jogo
Sensores físicos subjacentes: acelerômetro e giroscópio (sem magnetômetro)
Modo de relatório: contínuo
getDefaultSensor(SENSOR_TYPE_GAME_ROTATION_VECTOR)
retorna um sensor que não ativa
Um sensor de vetor de rotação de jogos é semelhante a um sensor de vetor de rotação, mas não usa o campo geomagnético. Portanto, o eixo Y não aponta para o norte, mas para alguma outra referência. Essa referência pode variar pela mesma ordem de magnitude que o giroscópio varia ao redor do eixo Z.
Consulte o sensor vetor de rotação para saber como definir sensors_event_t.data[0-3]. Esse sensor não
informa uma precisão de direção estimada:
sensors_event_t.data[4] está reservado e precisa ser definido como 0.
No caso ideal, um smartphone girado e retornado à mesma orientação do mundo real precisa informar o mesmo vetor de rotação do jogo.
Esse sensor precisa ser baseado em um giroscópio e um acelerômetro. Ele não pode usar o magnetômetro como entrada, além de indiretamente, pela estimativa da polarização do giroscópio.
Gravidade
Sensores físicos subjacentes: acelerômetro e (se presente) giroscópio (ou magnetômetro, se o giroscópio não estiver presente)
Modo de relatório: contínuo
getDefaultSensor(SENSOR_TYPE_GRAVITY)
retorna um sensor que não ativa
Um sensor de gravidade informa a direção e a magnitude da gravidade nas coordenadas do dispositivo.
Os componentes do vetor de gravidade são informados em m/s^2 nos campos x, y e z
de sensors_event_t.acceleration.
Quando o dispositivo está parado, a saída do sensor de gravidade precisa ser idêntica à do acelerômetro. Na Terra, a magnitude é de cerca de 9,8 m/s^2.
Se o dispositivo tiver um giroscópio, o sensor de gravidade precisará usar o giroscópio e o acelerômetro como entrada.
Se o dispositivo não tiver um giroscópio, o sensor de gravidade precisará usar o acelerômetro e o magnetômetro como entrada.
Vetor de rotação geomagnética
Sensores físicos subjacentes: acelerômetro e magnetômetro (sem giroscópio)
Modo de relatório: contínuo
Baixo consumo energético
getDefaultSensor(SENSOR_TYPE_GEOMAGNETIC_ROTATION_VECTOR)
retorna um sensor que não ativa
Um vetor de rotação geomagnética é semelhante a um sensor de vetor de rotação, mas usa um magnetômetro e não um giroscópio.
Esse sensor precisa ser baseado em um magnetômetro. Não é possível implementar esse sensor usando um giroscópio, e a entrada do giroscópio não pode ser usada por esse sensor.
Consulte o sensor vetor de rotação para saber como definir sensors_event_t.data[0-4].
Assim como no sensor de vetor de rotação, o erro de direção precisa ser menor que
a precisão estimada (sensors_event_t.data[4]) 95% do tempo.
Esse sensor precisa ter baixo consumo de energia, então ele precisa ser implementado no hardware.
Orientação (descontinuado)
Sensores físicos subjacentes: acelerômetro, magnetômetro e (se presente) giroscópio
Modo de relatório: contínuo
getDefaultSensor(SENSOR_TYPE_ORIENTATION)
retorna um sensor que não ativa
Observação:esse é um tipo de sensor mais antigo que foi descontinuado no SDK do Android. Ele foi substituído pelo sensor de vetor de rotação, que é definido de forma mais clara. Use o sensor de vetor de rotação em vez do sensor de orientação sempre que possível.
Um sensor de orientação informa a atitude do dispositivo. As medições
são informadas em graus nos campos x, y e z de
sensors_event_t.orientation:
sensors_event_t.orientation.x: azimute, o ângulo entre a direção do norte magnético e o eixo Y, em torno do eixo Z (0<=azimuth<360). 0=Norte, 90=Leste, 180=Sul, 270=Oeste.sensors_event_t.orientation.y: inclinação, rotação em torno do eixo X (-180<=pitch<=180), com valores positivos quando o eixo Z se move em direção ao eixo Y.sensors_event_t.orientation.z: rolagem, rotação em torno do eixo Y (-90<=roll<=90), com valores positivos quando o eixo X se move em direção ao eixo Z.
Por motivos históricos, o ângulo de inclinação é positivo no sentido horário. (Em termos matemáticos, ele precisa ser positivo no sentido anti-horário):
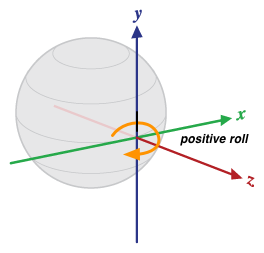
Figura 3. Orientação em relação a um dispositivo
Essa definição é diferente de guinada, inclinação e rolagem usadas na aviação, em que o eixo X está ao longo do lado longo do avião (da cauda para o nariz).
O sensor de orientação também informa a precisão esperada para as leituras
usando sensors_event_t.orientation.status. Consulte as constantes
SensorManager
SENSOR_STATUS_* para mais informações sobre
os possíveis valores desse campo.
Sensores não calibrados
Os sensores não calibrados fornecem resultados mais brutos e podem incluir alguma distorção, mas também contêm menos "saltos" devido a correções aplicadas pela calibração. Alguns apps podem preferir esses resultados não calibrados como mais suaves e confiáveis. Por exemplo, se um app tentar realizar a própria fusão de sensores, a introdução de calibrações pode distorcer os resultados.
Acelerômetro não calibrado
Sensor físico: acelerômetro
Modo de relatório: Contínuo
getDefaultSensor(SENSOR_TYPE_ACCELEROMETER_UNCALIBRATED)
retorna um sensor que não ativa
Um sensor de acelerômetro não calibrado informa a aceleração do dispositivo
ao longo dos três eixos do sensor sem nenhuma correção de viés (o viés de fábrica
e a compensação de temperatura são aplicados a medições não calibradas), além
de uma estimativa de viés.
Todos os valores estão em unidades SI (m/s^2) e são informados nos campos de
sensors_event_t.uncalibrated_accelerometer:
x_uncalib: aceleração (sem compensação de viés) ao longo do eixo Xy_uncalib: aceleração (sem compensação de viés) ao longo do eixo Yz_uncalib: aceleração (sem compensação de viés) ao longo do eixo Zx_bias: viés estimado ao longo do eixo Xy_bias: viés estimado ao longo do eixo Yz_bias: viés estimado ao longo do eixo Z
Giroscópio não calibrado
Sensor físico subjacente: giroscópio
Modo de relatório: contínuo
getDefaultSensor(SENSOR_TYPE_GYROSCOPE_UNCALIBRATED)
retorna um sensor que não ativa
Um giroscópio não calibrado informa a taxa de rotação em torno dos eixos do sensor
sem aplicar a compensação de viés a eles, junto com uma estimativa de viés. Todos
os valores estão em radianos/segundo e são informados nos campos de
sensors_event_t.uncalibrated_gyro:
x_uncalib: velocidade angular (sem compensação de deriva) ao redor do eixo Xy_uncalib: velocidade angular (sem compensação de deriva) ao redor do eixo Yz_uncalib: velocidade angular (sem compensação de deriva) ao redor do eixo Zx_bias: deriva estimada em torno do eixo Xy_bias: deriva estimada em torno do eixo Yz_bias: deriva estimada em torno do eixo Z
Conceitualmente, a medição não calibrada é a soma da medição
calibrada e da estimativa de viés: _uncalibrated = _calibrated + _bias.
Os valores x_bias,
y_bias e z_bias devem pular assim
que a estimativa do viés
mudar, e devem ser estáveis pelo resto do tempo.
Consulte a definição do sensor de giroscópio para detalhes sobre o sistema de coordenadas usado.
A calibragem de fábrica e a compensação de temperatura precisam ser aplicadas às
medições. Além disso, a estimativa de deriva do giroscópio precisa ser implementada para que
estimativas razoáveis possam ser informadas em x_bias,
y_bias e z_bias. Se a
implementação não conseguir estimar a deriva, esse sensor não poderá ser
implementado.
Se esse sensor estiver presente, o sensor de giroscópio correspondente também precisará estar presente e ambos os sensores precisarão compartilhar os mesmos valores sensor_t.name e sensor_t.vendor.
Campo magnético não calibrado
Sensor físico subjacente: magnetômetro
Modo de relatório: contínuo
getDefaultSensor(SENSOR_TYPE_MAGNETIC_FIELD_UNCALIBRATED)
retorna um sensor que não ativa
Um sensor de campo magnético não calibrado informa o campo magnético ambiente
com uma estimativa de calibração de ferro duro. Todos os valores estão em micro-Tesla
(uT) e são informados nos campos de
sensors_event_t.uncalibrated_magnetic:
x_uncalib: campo magnético (sem compensação de ferro) ao longo do eixo Xy_uncalib: campo magnético (sem compensação de ferro duro) ao longo do eixo Yz_uncalib: campo magnético (sem compensação de ferro duro) ao longo do eixo Zx_bias: viés de hardware estimado ao longo do eixo Xy_bias: viés de hardware estimado ao longo do eixo Yz_bias: viés de hardware estimado ao longo do eixo Z
Conceitualmente, a medição não calibrada é a soma da medição
calibrada e da estimativa de viés: _uncalibrated = _calibrated + _bias.
O magnetômetro não calibrado permite que algoritmos de nível mais alto processem
estimativas de hardware defeituoso. Os
valores x_bias, y_bias e z_bias devem
mudar assim que a
estimativa do hardware mudar, e devem permanecer estáveis pelo resto do
tempo.
A calibração de ferro macio e a compensação de temperatura precisam ser aplicadas às
medições. Além disso, a estimativa de hardware rígido precisa ser implementada para que
estimativas razoáveis possam ser informadas em x_bias,
y_bias e
z_bias. Se a implementação não conseguir estimar a inclinação,
esse sensor não poderá ser implementado.
Se esse sensor estiver presente, o sensor de campo magnético correspondente também
precisa estar presente, e ambos precisam compartilhar os mesmos valores de sensor_t.name e
sensor_t.vendor.
Ângulo de articulação
Modo de relatório: ao mudar
getDefaultSensor(SENSOR_TYPE_HINGE_ANGLE)
retorna um sensor de ativação
Um sensor de ângulo de dobradiça mede o ângulo, em graus, entre duas partes integrais do dispositivo. O movimento de uma articulação medido por esse tipo de sensor deve mudar a forma como o usuário interage com o dispositivo, por exemplo, abrindo ou revelando uma tela.
Sensores compostos de interação
Alguns sensores são usados principalmente para detectar interações com o usuário. Não definimos como esses sensores precisam ser implementados, mas eles precisam ter baixo consumo de energia e é responsabilidade do fabricante do dispositivo verificar a qualidade deles em termos de experiência do usuário.
Gesto de ativação
Sensores físicos subjacentes: indefinidos (qualquer coisa de baixa potência)
Modo de relatório: One-shot
Baixo consumo energético
Implemente apenas a versão de ativação desse sensor.
getDefaultSensor(SENSOR_TYPE_WAKE_GESTURE)
retorna um sensor de ativação
Um sensor de gesto de ativação permite ativar o dispositivo com base em um movimento específico. Quando esse sensor é acionado, o dispositivo se comporta como se o botão liga/desliga tivesse sido pressionado, ativando a tela. Esse comportamento (ligar a tela quando o sensor é acionado) pode ser desativado pelo usuário nas configurações do dispositivo. As mudanças nas configurações não afetam o comportamento do sensor, apenas se o framework ativa a tela quando é acionado. O gesto a ser detectado não é especificado e pode ser escolhido pelo fabricante do dispositivo.
Esse sensor precisa ter baixo consumo de energia, já que provavelmente será ativado 24 horas por dia.
Cada evento do sensor informa 1 em sensors_event_t.data[0].
Gesto de levantar a mão
Sensores físicos subjacentes: indefinidos (qualquer coisa de baixa potência)
Modo de relatório: One-shot
Baixo consumo energético
Implemente apenas a versão de ativação desse sensor.
getDefaultSensor(SENSOR_TYPE_PICK_UP_GESTURE)
retorna um sensor de ativação
Um sensor de gesto de ativação é acionado quando o dispositivo é levantado, independente de onde ele estava antes (mesa, bolso, bolsa).
Cada evento do sensor informa 1 em sensors_event_t.data[0].
Gesto de Glance
Sensores físicos subjacentes: indefinidos (qualquer coisa de baixa potência)
Modo de relatório: One-shot
Baixo consumo energético
Implemente apenas a versão de ativação desse sensor.
getDefaultSensor(SENSOR_TYPE_GLANCE_GESTURE)
retorna um sensor de ativação
Um sensor de gesto de relance permite ativar brevemente a tela para que o usuário possa conferir o conteúdo na tela com base em um movimento específico. Quando esse sensor é acionado, o dispositivo ativa a tela momentaneamente para permitir que o usuário confira notificações ou outro conteúdo enquanto o dispositivo permanece bloqueado em um estado não interativo (em suspensão), e a tela é desligada novamente. Esse comportamento (ligar brevemente a tela quando o sensor é acionado) pode ser desativado pelo usuário nas configurações do dispositivo. As mudanças nas configurações não afetam o comportamento do sensor, apenas se o framework liga a tela brevemente quando é acionado. O gesto a ser detectado não é especificado e pode ser escolhido pelo fabricante do dispositivo.
Esse sensor precisa ter baixo consumo de energia, já que provavelmente será ativado 24 horas por dia.
Cada evento do sensor informa 1 em
sensors_event_t.data[0].
Sensores IMU de eixos limitados
Disponíveis no Android 13, os sensores IMU de eixos limitados
são sensores que oferecem suporte a casos de uso em que nem todos os três eixos (x, y, z) estão
disponíveis. Os tipos de IMU padrão no Android (como
SENSOR_TYPE_ACCELEROMETER
e
SENSOR_TYPE_GYROSCOPE)
assumem que os três eixos são compatíveis. No entanto, nem todos os formatos e
dispositivos oferecem suporte a acelerômetros e giroscópios de três eixos.
Eixos limitados do acelerômetro
Sensores físicos subjacentes: acelerômetro
Modo de relatório: contínuo
getDefaultSensor(SENSOR_TYPE_ACCELEROMETER_LIMITED_AXES)
retorna um sensor que não ativa
Um sensor de eixos limitados do acelerômetro é equivalente a
TYPE_ACCELEROMETER, mas oferece suporte a casos em que um ou dois eixos
não são compatíveis.
Os três últimos valores de evento do sensor informados pelo sensor representam se
o valor de aceleração dos eixos x, y e z é compatível. Um valor de
1.0 indica que o eixo tem suporte, e um valor de
0 indica que ele não tem suporte. Os fabricantes de dispositivos identificam
os eixos compatíveis no momento do build, e os valores não mudam durante
a execução.
Os fabricantes de dispositivos precisam definir os valores de aceleração para eixos não usados como
0, em vez de valores indefinidos.
Eixos limitados do giroscópio
Sensores físicos subjacentes: giroscópio
Modo de relatório: Contínuo
getDefaultSensor(SENSOR_TYPE_GYROSCOPE_LIMITED_AXES)
retorna um sensor que não ativa
Um sensor de eixos limitados do giroscópio é equivalente a TYPE_GYROSCOPE,
mas oferece suporte a casos em que um ou dois eixos não são compatíveis.
Os três últimos valores de evento do sensor informados pelo sensor representam se
o valor da velocidade angular para os eixos x, y e z é compatível. Um valor de
1.0 indica que o eixo tem suporte, e um valor de
0 indica que ele não tem suporte. Os fabricantes de dispositivos identificam
os eixos compatíveis no momento do build, e os valores não mudam durante
a execução.
Os fabricantes de dispositivos precisam definir os valores de velocidade angular para eixos não usados como
0.
Eixos limitados do acelerômetro não calibrados
Sensores físicos subjacentes: acelerômetro
Modo de relatório: Contínuo
getDefaultSensor(SENSOR_TYPE_ACCELEROMETER_LIMITED_AXES_UNCALIBRATED)
retorna um sensor que não ativa
Um sensor de eixos limitados de acelerômetro não calibrado é equivalente a
TYPE_ACCELEROMETER_UNCALIBRATED, mas oferece suporte a casos em que um ou
dois eixos não são compatíveis.
Os três últimos valores de evento do sensor informados pelo sensor representam se
os valores de aceleração e viés para os eixos x, y e z são aceitos. Um
valor de 1.0 indica que o eixo tem suporte, e um valor
de 0 indica que ele não tem suporte. Os fabricantes de dispositivos identificam
os eixos compatíveis no momento do build, e os valores não mudam durante
a execução.
Os fabricantes de dispositivos precisam definir os valores de aceleração e viés para eixos não usados
como 0.
Eixos limitados do giroscópio não calibrados
Sensores físicos subjacentes: giroscópio
Modo de relatório: Contínuo
getDefaultSensor(SENSOR_TYPE_GYROSCOPE_LIMITED_AXES_UNCALIBRATED)
retorna um sensor que não ativa
Um sensor não calibrado com eixos limitados do giroscópio é equivalente a
TYPE_GYROSCOPE_UNCALIBRATED, mas oferece suporte a casos em que um ou dois
eixos não são compatíveis.
Os três últimos valores de evento do sensor informados pelo sensor representam se
os valores de velocidade angular e deriva para os eixos x, y e z são aceitos. Um
valor de 1.0 indica que o eixo tem suporte, e um valor
de 0 indica que ele não tem suporte. Os fabricantes de dispositivos identificam
os eixos compatíveis no momento do build, e os valores não mudam durante
a execução.
Os fabricantes de dispositivos precisam definir os valores de velocidade angular e deriva para eixos não usados
como 0.
IMU de eixos limitados compostos
Sensores físicos subjacentes: qualquer combinação de acelerômetro de três eixos, giroscópio de três eixos, acelerômetro de três eixos não calibrado e giroscópio de três eixos não calibrado.
Modo de relatório: Contínuo
Um sensor IMU de eixos limitados composto é equivalente a um sensor IMU de eixos limitados, mas, em vez de ter suporte no HAL, ele converte os dados do sensor de três eixos nas variantes de eixos limitados equivalentes. Esses sensores compostos são ativados apenas para dispositivos automotivos.
A tabela a seguir mostra um exemplo de conversão de um acelerômetro padrão de três eixos para um acelerômetro composto de eixos limitados.
| Valores de SensorEvent para SENSOR_TYPE_ACCELEROMETER | Exemplo de SensorEvent SENSOR_TYPE_ACCELEROMETER | SensorEvent composto SENSOR_TYPE_ACCELEROMETER_LIMITED_AXES |
|---|---|---|
| values[0] | -0,065 |
-0,065 |
| valores[1] | 0,078 |
0,078 |
| values[2] | 9,808 |
9,808 |
| values[3] | N/A |
1.0 |
| values[4] | N/A |
1.0 |
| values[5] | N/A |
1.0 |
Sensores automotivos
Sensores para casos de uso automotivo.
Título
Sensores físicos subjacentes: qualquer combinação de GPS, magnetômetro, acelerômetro e giroscópio.
Modo de relatório: contínuo
getDefaultSensor(SENSOR_TYPE_HEADING)
retorna um sensor que não ativa
Disponível no Android 13, um sensor de orientação
mede a direção em que o dispositivo está apontando em relação ao norte verdadeiro
em graus. O sensor de direção inclui dois valores SensorEvent.
Um para a direção do dispositivo medida e outro para a precisão do valor de direção fornecido.
Os valores de direção informados por esse sensor precisam estar entre
0.0 (inclusivo) e 360.0 (exclusivo), com
0 indicando norte, 90 leste, 180 sul
e 270 oeste.
A precisão desse sensor é definida com 68% de confiança. No caso em que a distribuição subjacente é normal gaussiana, a precisão é um desvio padrão. Por exemplo, se o sensor de direção retornar um valor de direção de 60 graus e um valor de precisão de 10 graus, há uma probabilidade de 68% de a direção verdadeira estar entre 50 e 70 graus.