2026년부터 트렁크 안정 개발 모델과 일치하고 생태계의 플랫폼 안정성을 보장하기 위해 2분기와 4분기에 AOSP에 소스 코드를 게시합니다. AOSP를 빌드하고 기여하려면 aosp-main 대신 android-latest-release를 사용하는 것이 좋습니다. android-latest-release 매니페스트 브랜치는 항상 AOSP에 푸시된 최신 버전을 참조합니다. 자세한 내용은 AOSP 변경사항을 참고하세요.
 Google uses AI technology to translate content into your preferred language. AI translations can contain errors.
Google uses AI technology to translate content into your preferred language. AI translations can contain errors.
햅틱 구현
컬렉션을 사용해 정리하기
내 환경설정을 기준으로 콘텐츠를 저장하고 분류하세요.
일반적으로 기기 제조업체는 각 기기에 대해 생성된 비공개 애셋의 소유자로 간주됩니다. 따라서 기기 제조업체의 엔지니어링 작업은 흔히 기기별로 집중됩니다. 그리고 기기 제조업체는 생태계에 있는 다른 기기와의 일관성을 위해 거의 노력하지 않습니다.
이와는 대조적으로 개발자는 각 기기의 기술 사양과 관계없이 생태계의 모든 Android 휴대전화에서 작동하는 앱을 빌드하려고 노력합니다.
이러한 접근 방식의 차이로 인해 조각화 문제가 발생할 수 있습니다. 예를 들어 특정 휴대전화의 하드웨어 기능이 앱 개발자가 설정한 기대와 일치하지 않습니다. 따라서 햅틱 API가 일부 Android 휴대전화에서는 작동하지만 다른 휴대전화에서는 작동하지 않는다면 결과적으로 생태계가 일관되지 않게 됩니다. 이러한 이유로 제조업체가 모든 기기에 Android 햅틱 API를 구현할 수 있도록 하는 데 하드웨어 구성이 중요한 역할을 합니다.
이 페이지에서는 Android 햅틱 API를 최대한 활용할 수 있도록 하드웨어 규정 준수를 설정하는 단계별 체크리스트를 제공합니다.
다음 그림에서는 기기 제조업체와 개발자 간의 공통 지식 구축을 보여주는데, 이 단계는 일관성 있는 생태계를 만드는 데 매우 중요합니다.
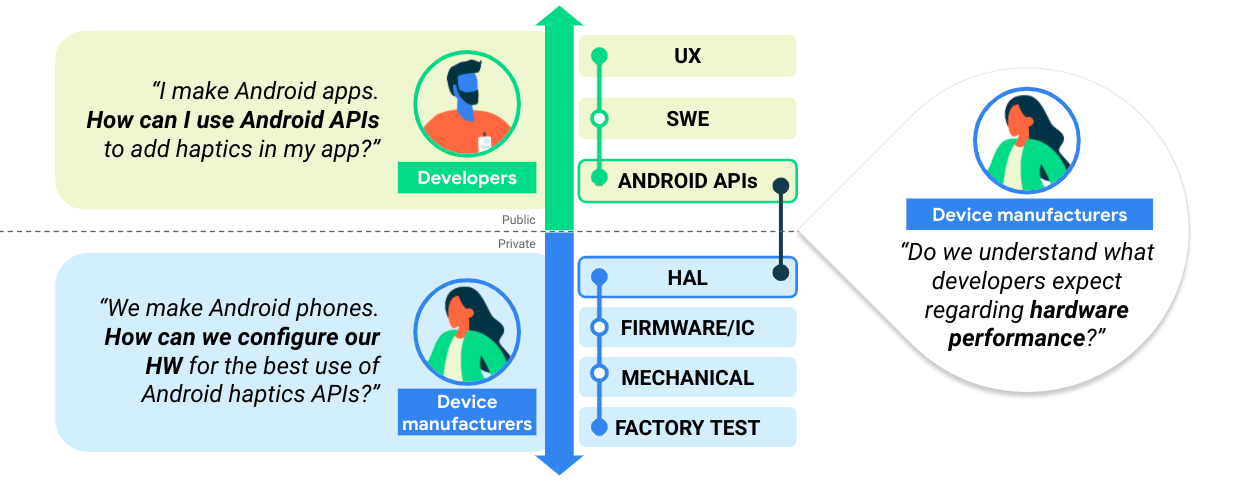
그림 1. 기기 제조업체와 개발자 간의 지식 구축
햅틱 구현 체크리스트
상수 구현
프리미티브 구현
HAL과 API 간의 상수 매핑
- 프레임워크의 자리표시자라는 공개 API 상수와 자리표시자를 구현하는 HAL 상수 간의 매핑 권장사항입니다.
- 이 프로세스에 관해 자세히 알아보려면 권장 매핑을 안내하는 디자인 원칙을 참고하세요.
선형 엔벨로프 (PWLE) 효과 구현
하드웨어 평가
- 타겟 햅틱 효과에 관한 안내입니다. 이러한 안내에 따라 하드웨어에 관해 빠르게 확인할 수 있습니다.
이 페이지에 나와 있는 콘텐츠와 코드 샘플에는 콘텐츠 라이선스에서 설명하는 라이선스가 적용됩니다. 자바 및 OpenJDK는 Oracle 및 Oracle 계열사의 상표 또는 등록 상표입니다.
최종 업데이트: 2025-12-03(UTC)
[[["이해하기 쉬움","easyToUnderstand","thumb-up"],["문제가 해결됨","solvedMyProblem","thumb-up"],["기타","otherUp","thumb-up"]],[["필요한 정보가 없음","missingTheInformationINeed","thumb-down"],["너무 복잡함/단계 수가 너무 많음","tooComplicatedTooManySteps","thumb-down"],["오래됨","outOfDate","thumb-down"],["번역 문제","translationIssue","thumb-down"],["샘플/코드 문제","samplesCodeIssue","thumb-down"],["기타","otherDown","thumb-down"]],["최종 업데이트: 2025-12-03(UTC)"],[],[]]
