
本頁說明 HAL 子系統,包括要求、攝影機子系統、啟動和作業順序、硬體層級,以及互動。
要求
應用程式架構會向攝影機子系統發出擷取結果的要求。 一項要求對應一組結果。要求會封裝擷取及處理這些結果的所有設定資訊。包括解析度和像素格式、手動感應器、鏡頭和閃光燈控制項、3A 作業模式、RAW 到 YUV 的處理控制項,以及統計資料產生。這可讓您進一步控管結果的輸出和處理方式。您可以同時發出多個要求,而且提交要求時不會遭到封鎖。系統一律會按照收到要求的順序處理。
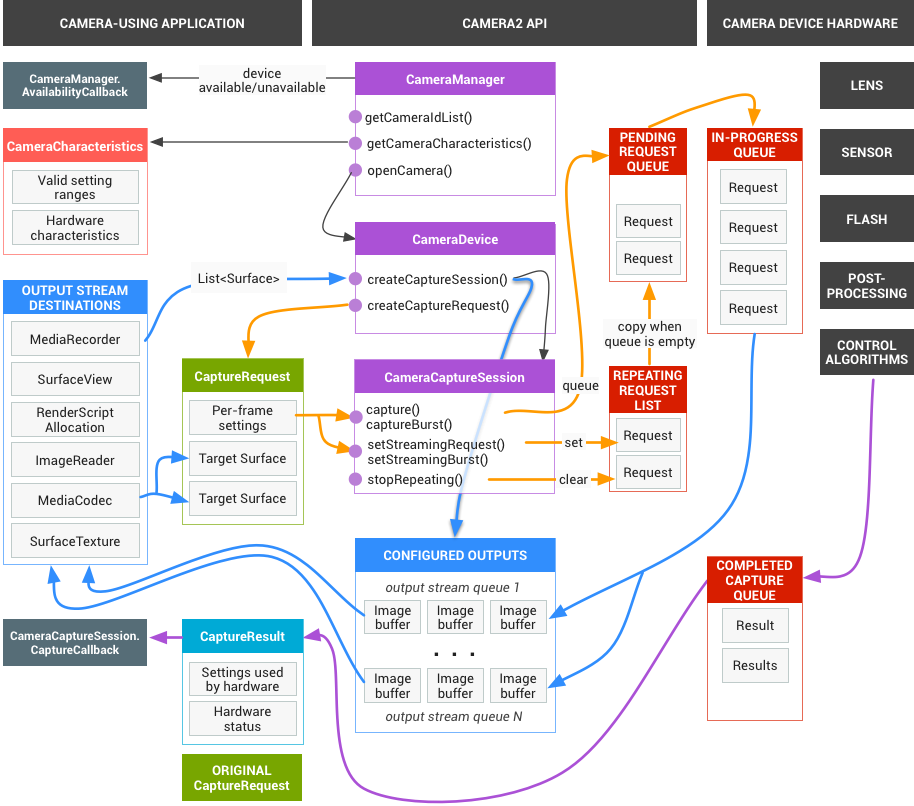
圖 1. 相機型號。
HAL 和相機子系統
相機子系統包含相機管道中元件的實作方式,例如 3A 演算法和處理控制項。相機 HAL 提供介面,供您實作這些元件的版本。為維持多個裝置製造商和影像訊號處理器 (ISP,或稱相機感應器) 供應商之間的跨平台相容性,相機管道模型是虛擬的,不會直接對應任何實際的 ISP。不過,這與實際的處理管道十分相似,因此您可以有效率地將其對應至硬體。此外,這項技術的抽象程度足以支援多種不同的演算法和作業順序,同時確保品質、效率和跨裝置相容性。
相機管道也支援應用程式架構可啟動的觸發條件,例如開啟自動對焦。此外,它也會將通知傳送回應用程式架構,通知應用程式自動對焦鎖定或發生錯誤等事件。
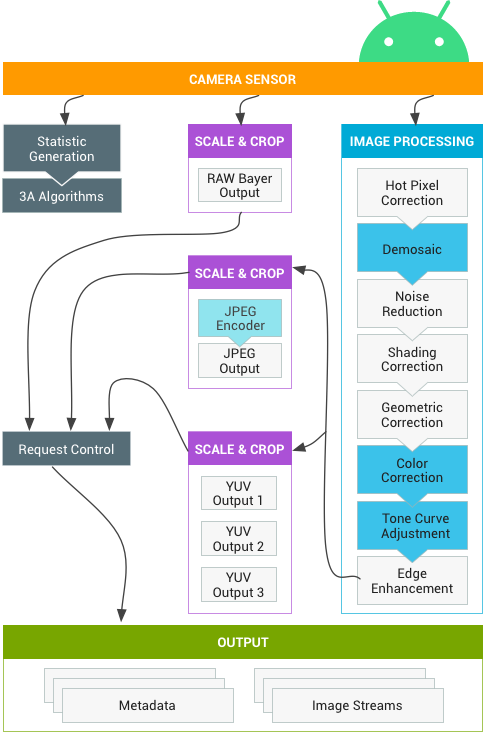
圖 2. 攝影機管道。
請注意,上圖顯示的部分圖像處理區塊在初始版本中並未明確定義。相機管道會做出下列假設:
- RAW Bayer 輸出內容不會在 ISP 內經過任何處理。
- 系統會根據原始感應器資料生成統計資料。
- 將原始感應器資料轉換為 YUV 的各種處理區塊順序任意。
- 雖然會顯示多個縮放和裁剪單元,但所有縮放器單元都會共用輸出區域控制項 (數位變焦)。不過,每個單元可能會有不同的輸出解析度和像素格式。
API 使用摘要
以下簡要說明如何使用 Android Camera API。如要詳細瞭解這些步驟 (包括 API 呼叫),請參閱「啟動和預期作業順序」一節。
- 監聽及列舉攝影機裝置。
- 開啟裝置並連線至接聽器。
- 針對目標用途設定輸出內容 (例如靜態擷取或錄製)。
- 為目標用途建立要求。
- 擷取/重複要求和叢發。
- 接收結果中繼資料和圖片資料。
- 切換用途時,請返回步驟 3。
HAL 作業摘要
- 架構會發出非同步擷取要求。
- HAL 裝置必須依序處理要求。並為每個要求產生輸出結果中繼資料,以及一或多個輸出圖片緩衝區。
- 要求和結果,以及後續要求參照的串流,都會依先進先出原則處理。
- 特定要求的所有輸出內容必須具有相同時間戳記,架構才能視需要將這些內容配對。
- 所有擷取設定和狀態 (3A 常式除外) 都會封裝在要求和結果中。
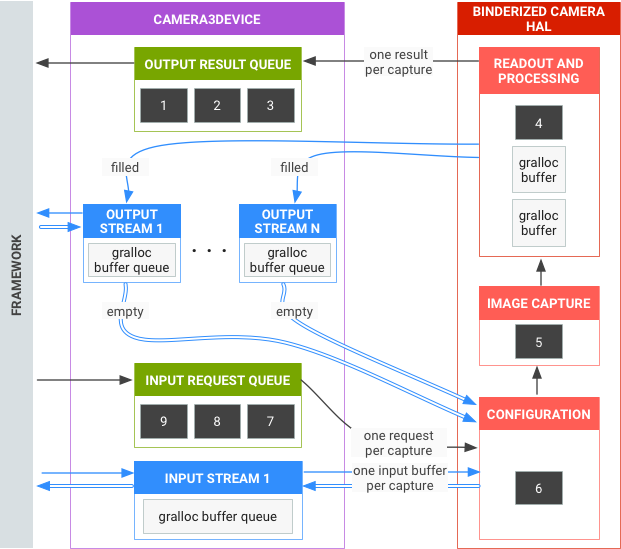
圖 3. 相機 HAL 總覽。
啟動和預期作業順序
本節詳細說明使用 Camera API 時的預期步驟。如需 HIDL 介面定義,請參閱 platform/hardware/interfaces/camera/。
列舉及開啟攝影機裝置,並建立有效工作階段
- 初始化後,架構會開始監聽實作
ICameraProvider介面的任何現有攝影機供應器。如果存在這類供應商,架構會嘗試建立連線。 - 架構會透過
ICameraProvider::getCameraIdList列舉攝影機裝置。 - 架構會呼叫對應的
ICameraProvider::getCameraDeviceInterface_VX_X,例項化新的ICameraDevice。 - 架構會呼叫
ICameraDevice::open,建立新的有效擷取工作階段 ICameraDeviceSession。
使用攝影機工作階段
- 架構會使用輸入/輸出串流清單呼叫 HAL 裝置的
ICameraDeviceSession::configureStreams。 - 架構會針對某些用途,透過呼叫
ICameraDeviceSession::constructDefaultRequestSettings要求預設設定。ICameraDeviceSession建立後,隨時可能發生這種情況。ICameraDevice::open - 架構會根據其中一組預設設定,建構並將第一個擷取要求傳送至 HAL,且至少有一個輸出串流是架構先前註冊的。這會傳送至 HAL,並附上
ICameraDeviceSession::processCaptureRequest。HAL 必須封鎖這項呼叫的回傳,直到準備好傳送下一個要求為止。 - 架構會繼續提交要求並呼叫
ICameraDeviceSession::constructDefaultRequestSettings,視需要取得其他用途的預設設定緩衝區。 - 當要求開始擷取 (感應器開始曝光以進行擷取) 時,HAL 會呼叫
ICameraDeviceCallback::notify並傳送 SHUTTER 訊息,包括影格編號和曝光開始時間戳記。這個通知回呼不一定要在要求的第一個processCaptureResult呼叫之前發生,但除非呼叫該擷取的notify,否則不會將任何結果傳送至應用程式以供擷取。 - 管道延遲一段時間後,HAL 會開始將完成的擷取作業傳回架構,並附上
ICameraDeviceCallback::processCaptureResult。系統會按照提交要求的順序傳回這些結果。視攝影機 HAL 裝置的管道深度而定,一次可處理多個要求。
過一段時間後,會發生下列其中一種情況:
- 架構會停止提交新要求,等待現有擷取作業完成 (填滿所有緩衝區、傳回所有結果),然後再次呼叫
ICameraDeviceSession::configureStreams。這會重設攝影機硬體和管道,以處理一組新的輸入/輸出串流。部分串流可重複使用先前的設定。如果至少有一個已註冊的輸出串流,架構就會從第一個擷取要求繼續執行至 HAL。(否則請先取得ICameraDeviceSession::configureStreams角色)。 - 架構可以呼叫
ICameraDeviceSession::close來結束攝影機工作階段。只要沒有其他來自架構的呼叫處於啟用狀態,隨時都可以呼叫這個函式,但呼叫可能會遭到封鎖,直到所有進行中的擷取作業完成為止 (所有結果都已傳回,所有緩衝區都已填滿)。close呼叫傳回後,HAL 就不得再呼叫ICameraDeviceCallback。close呼叫開始後,架構就無法呼叫任何其他 HAL 裝置函式。 - 如有錯誤或其他非同步事件,HAL 必須使用適當的錯誤/事件訊息呼叫
ICameraDeviceCallback::notify。從裝置範圍的重大錯誤通知返回後,HAL 應如同已對其呼叫close一樣運作。不過,HAL 必須先取消或完成所有未完成的擷取作業,才能呼叫notify,這樣在notify發生嚴重錯誤後,架構就不會再收到裝置的回呼。除了close以外的方法,都應在notify方法從嚴重錯誤訊息傳回後,傳回-ENODEV或NULL。
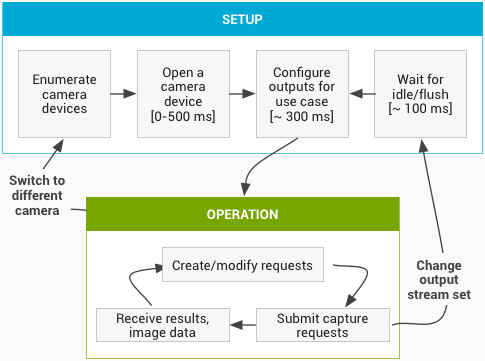
圖 4. 攝影機運作流程。
硬體層級
攝影機裝置可根據自身功能實作多個硬體層級。詳情請參閱 支援的硬體層級。
應用程式擷取要求、3A 控制項和處理管道之間的互動
視 3A 控制區塊中的設定而定,相機管道會忽略應用程式擷取要求中的部分參數,並改用 3A 控制常式提供的值。舉例來說,如果自動曝光功能處於啟用狀態,感應器的曝光時間、影格時間和感光度參數會由平台 3A 演算法控制,系統會忽略應用程式指定的任何值。3A 常式為影格選擇的值必須在輸出中繼資料中回報。下表說明 3A 控制區塊的不同模式,以及這些模式控制的屬性。如要瞭解這些屬性的定義,請參閱 platform/system/media/camera/docs/docs.html 檔案。
| 參數 | 狀態 | 受控屬性 |
|---|---|---|
android.control.aeMode |
OFF |
無。 |
ON |
android.sensor.exposureTime、android.sensor.frameDuration、android.sensor.sensitivity、android.lens.aperture (如支援) 和 android.lens.filterDensity (如支援)。 |
|
ON_AUTO_FLASH |
所有內容,外加 android.flash.firingPower、android.flash.firingTime 和 android.flash.mode。ON |
|
ON_ALWAYS_FLASH |
與 ON_AUTO_FLASH 相同。 |
|
ON_AUTO_FLASH_RED_EYE |
與 ON_AUTO_FLASH 相同。 |
|
android.control.awbMode |
OFF |
無。 |
WHITE_BALANCE_* |
android.colorCorrection.transform。如果 android.colorCorrection.mode 為 FAST 或 HIGH_QUALITY,則需進行平台專屬調整。 |
|
android.control.afMode |
OFF |
無 |
FOCUS_MODE_* |
android.lens.focusDistance |
|
android.control.videoStabilization |
OFF |
無。 |
ON |
可調整 android.scaler.cropRegion 實作影片穩定功能。 |
|
android.control.mode |
OFF |
AE、AWB 和 AF 已停用。 |
AUTO |
使用個別 AE、AWB 和 AF 設定。 | |
SCENE_MODE_* |
可以覆寫上述所有參數。個別 3A 控制項已停用。 |
圖 2 中圖片處理區塊的控制項運作原理類似,每個區塊都有三種模式:
OFF:這個處理區塊已停用。無法停用去馬賽克、色彩校正和色調曲線調整區塊。FAST:在此模式下,處理區塊的輸出影格速率可能不會比OFF模式慢,但應會盡可能產生最佳品質的輸出內容。這通常用於預覽或錄影模式,或是連拍靜態影像。在某些裝置上,這可能等同於OFF模式 (不降低影格率就無法進行處理),在某些裝置上,這可能等同於HIGH_QUALITY模式 (最佳品質仍不會降低影格率)。HIGH_QUALITY:在此模式下,處理區塊應盡可能產生最佳品質的結果,並視需要降低輸出影格率。這通常用於擷取高畫質靜態影像。部分方塊包含手動控制選項,可選擇使用這個選項,而非FAST或HIGH_QUALITY。舉例來說,色彩校正區塊支援色彩轉換矩陣,而色調曲線調整則支援任意全域色調映射曲線。
相機子系統可支援的最大影格率取決於多項因素:
- 輸出圖像串流的指定解析度
- 成像器上的分組/跳過模式適用情形
- 影像感應器介面的頻寬
- 各 ISP 處理區塊的頻寬
不同 ISP 和感應器之間的這些因素差異很大,因此相機 HAL 介面會盡量將頻寬限制抽象化為簡單模型。這個模型具有下列特徵:
- 影像感應器一律會根據應用程式要求的輸出串流大小,設定為輸出最小解析度。最小解析度定義為至少與要求的最大輸出串流大小相同。
- 任何要求都可以使用目前設定的任何或所有輸出串流,因此感應器和 ISP 必須設定為同時支援將單一擷取作業擴展至所有串流。
- 如果要求未包含 JPEG 串流,JPEG 串流會像經過處理的 YUV 串流;如果要求直接參照 JPEG 串流,則會像 JPEG 串流。
- JPEG 處理器可與其餘相機管道並行運作,但一次只能處理一個擷取作業。