
Sau khi tải xuống và chạy các tệp MATLAB, hãy sử dụng các biểu đồ quy trình sau đây để phân tích các tệp dạng sóng được ghi lại ở bước trước.
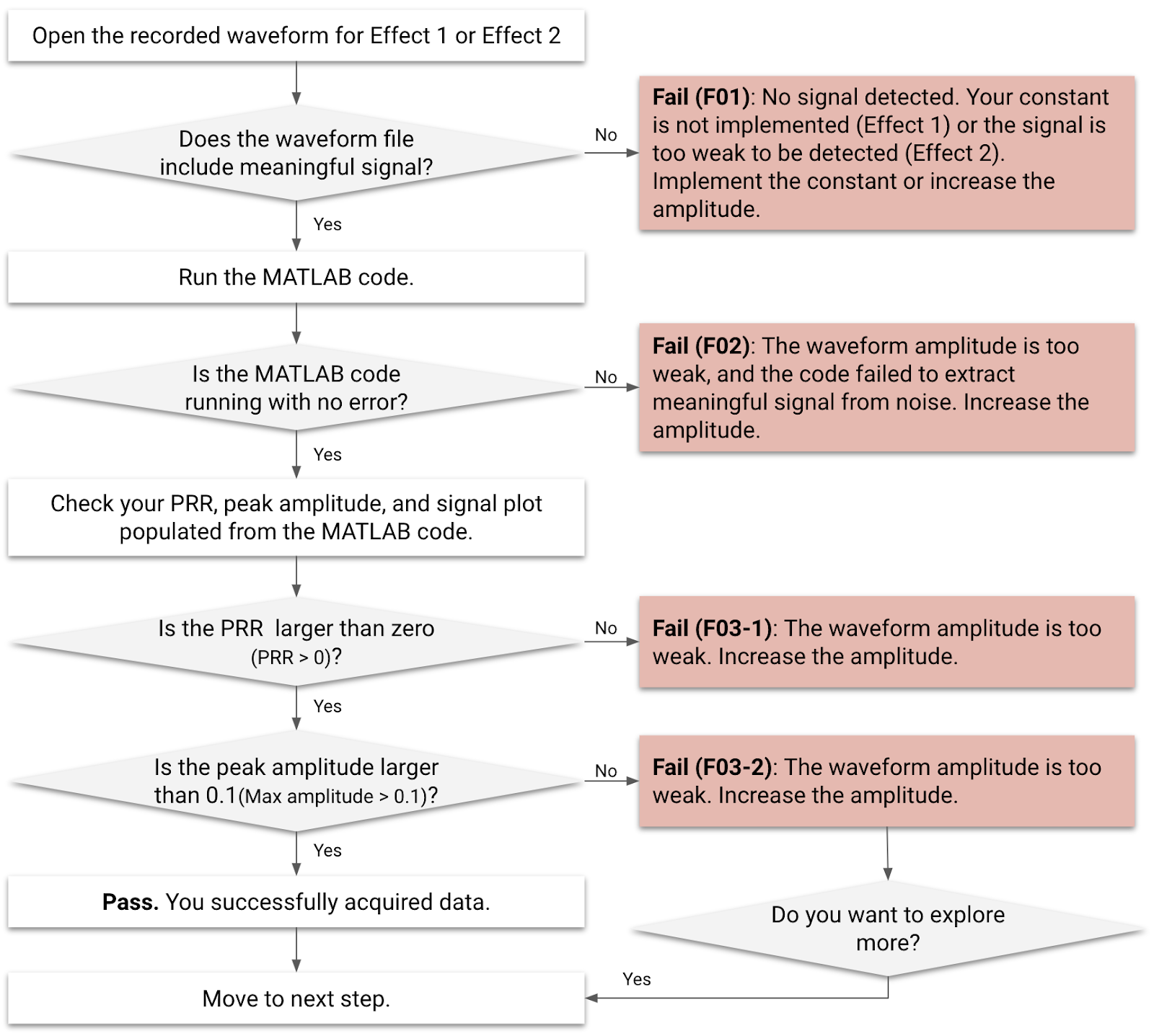
Hình 1. Lưu đồ phân tích dạng sóng cho Hiệu ứng 1 và Hiệu ứng 2
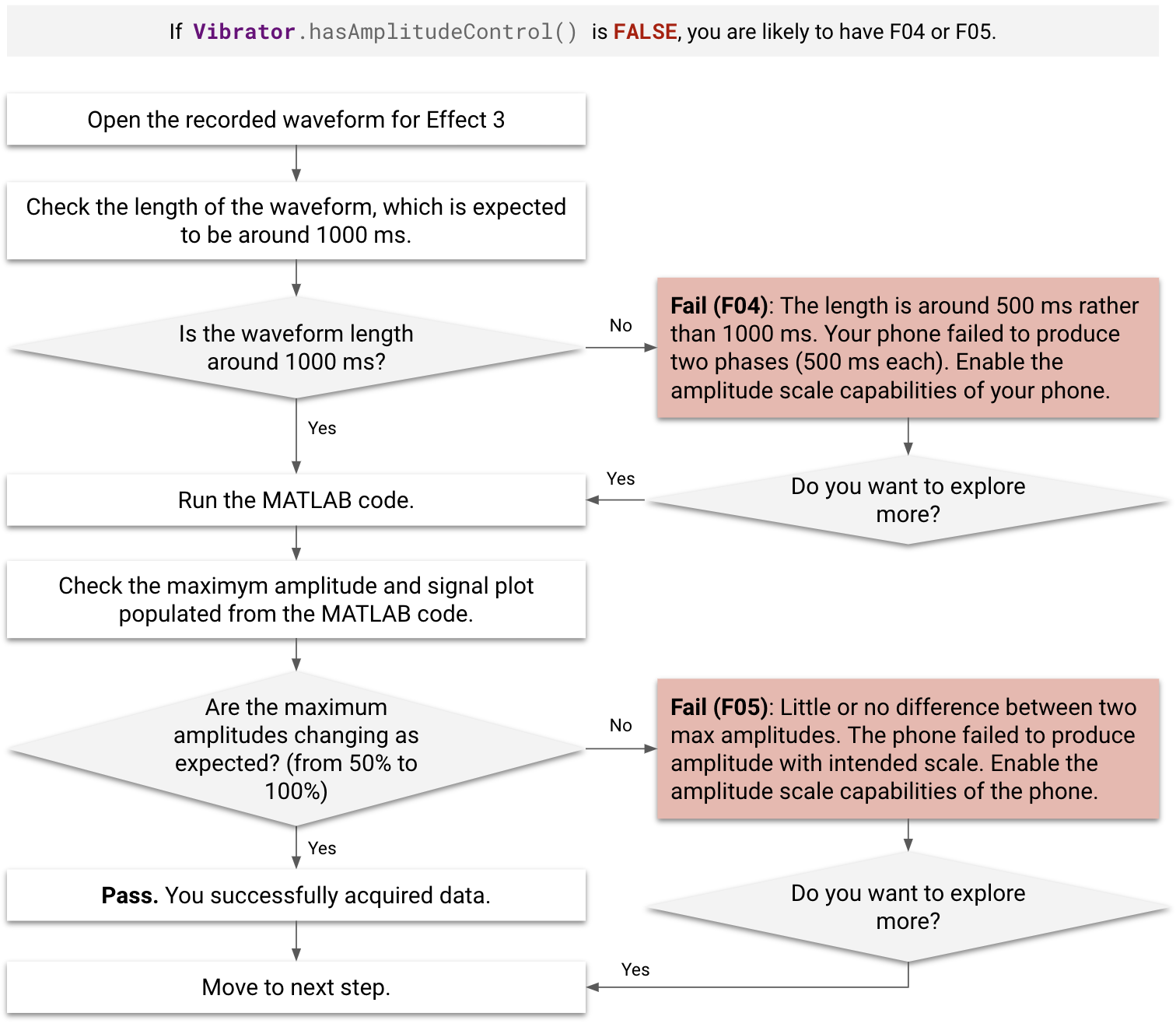
Hình 2. Lưu đồ phân tích dạng sóng cho Hiệu ứng 3
Các trường hợp lỗi
Trước và trong quá trình phân tích, hãy kiểm tra các trường hợp lỗi (F01 – F05).
- Mã MATLAB không xử lý được các hiệu ứng được chỉ định bằng F01 và F02.
- Những hiệu ứng được chỉ định bằng F03-1 không đủ điều kiện để thêm vào bản đồ hiệu suất, ngay cả khi chúng được xử lý bằng mã MATLAB mà không có lỗi.
- Bạn vẫn có thể thêm các hiệu ứng được chỉ định bằng F03-2, F04 và F05 vào bản đồ hiệu suất, mặc dù quá trình xử lý không thành công.
- Nếu
Vibrator.hasAmplitudeControl()trả vềfalse, thì DUT được chỉ định là F04 hoặc F05. - Nếu có độ trễ đáng kể (hơn 500 mili giây) sau khi nhấp vào nút Hiệu ứng 3 trong quá trình đo lường, thì DUT sẽ nhận được chỉ định F04.
| Mã lỗi | Nội dung mô tả về lỗi | Các hiệu ứng có thể áp dụng | Lý do xảy ra lỗi | Khắc phục lỗi |
|---|---|---|---|---|
| F01 | Không có tín hiệu đầu ra nào được ghi lại. | Hiệu ứng 1 | Hằng số phản hồi xúc giác chưa được triển khai. | Triển khai hằng số trống như mô tả trong phần Triển khai hằng số. |
| F02 | Lỗi mã MATLAB. Ví dụ về lỗi MATLAB: Chỉ mục vượt quá kích thước ma trận. |
Hiệu ứng 1, Hiệu ứng 2 | Cường độ của hiệu ứng xúc giác quá yếu. | Tăng biên độ của hiệu ứng xúc giác. |
| F03-1, F03-2 | [F03-1] Không có lỗi MATLAB, nhưng PRR được điền sẵn từ mã MATLAB nhỏ hơn 0. [F03-2] Không có lỗi MATLAB, nhưng biên độ được điền sẵn từ mã MATLAB nhỏ hơn 0,1 g. |
Hiệu ứng 1, Hiệu ứng 2 | Cường độ của hiệu ứng xúc giác quá yếu. | Tăng biên độ của hiệu ứng xúc giác. |
| F04 | Tín hiệu quá ngắn (khoảng 500 mili giây thay vì 1000 mili giây). | Hiệu ứng 3 | Thiết bị không tạo được biên độ được điều chỉnh đúng cách. Biên độ pha 500 mili giây đầu tiên được tạo với biên độ 0% mặc dù đã gọi biên độ 50%. | Bật các chức năng điều chỉnh biên độ. |
| F05 | Hai giá trị biên độ tối đa không có hoặc có rất ít sự khác biệt. | Hiệu ứng 3 | Thiết bị không tạo được biên độ được điều chỉnh đúng cách. | Bật các chức năng điều chỉnh biên độ. |
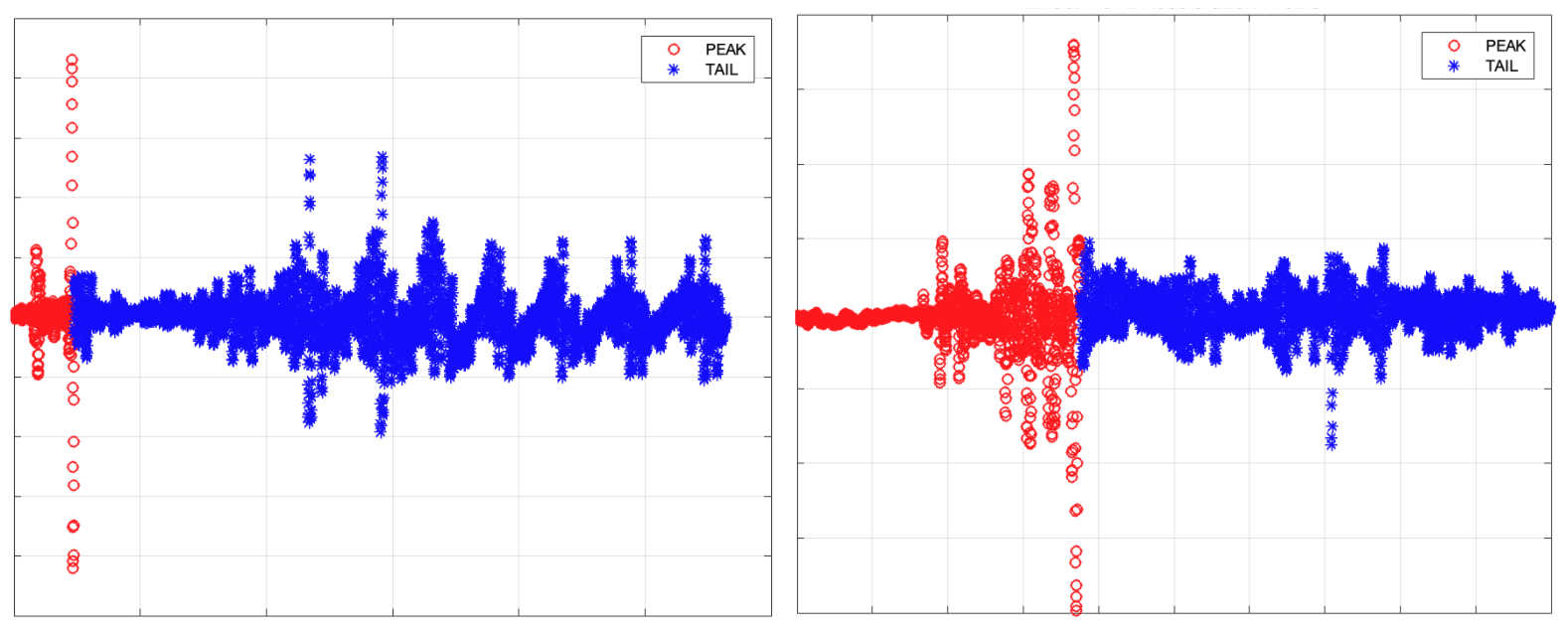
Hình 3. Ví dụ về biểu đồ tín hiệu MATLAB cho F03-1 (bên trái) và F03-2 (bên phải)
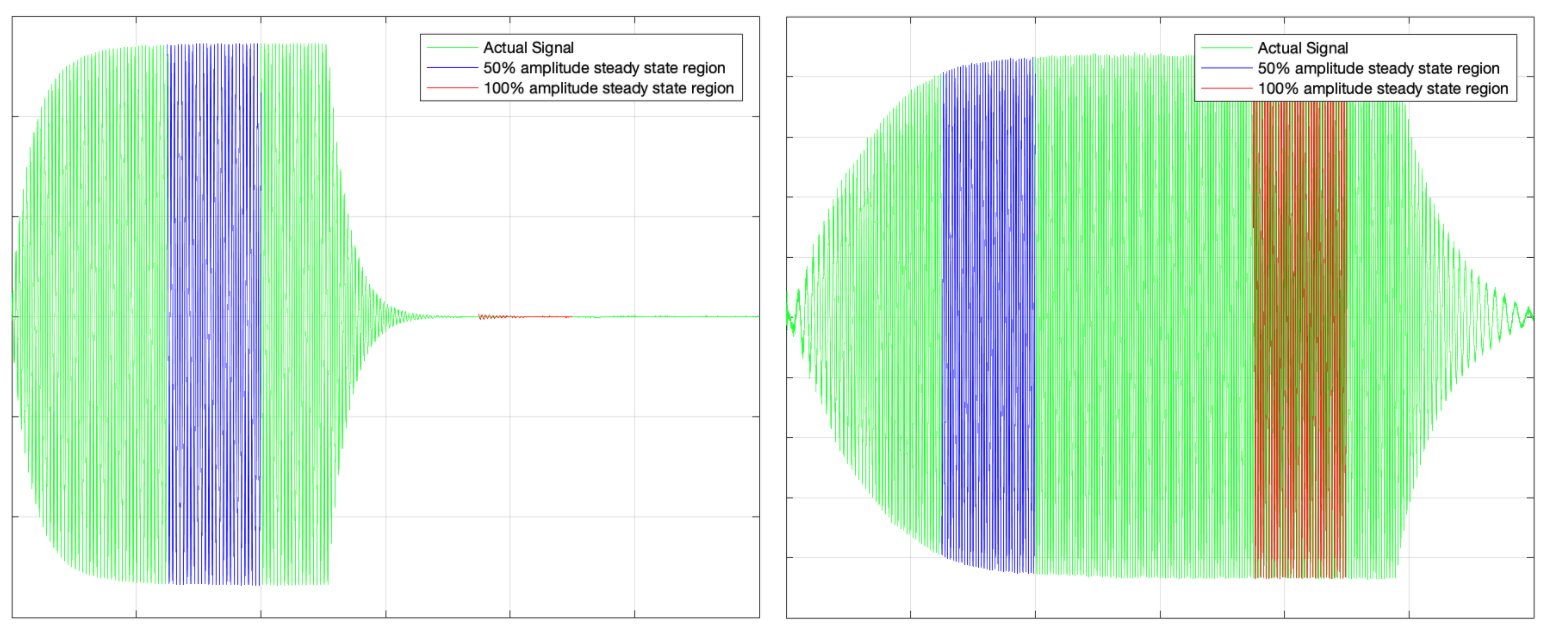
Hình 4. Ví dụ về biểu đồ tín hiệu MATLAB cho F04 (bên trái) và F05 (bên phải)
Thu thập dữ liệu từ bản phân tích
Khi chạy mã MATLAB cho từng hiệu ứng, bạn có thể đọc kết quả xuất hiện trong Cửa sổ lệnh của phần mềm MATLAB.
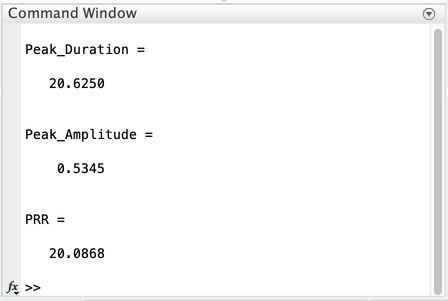
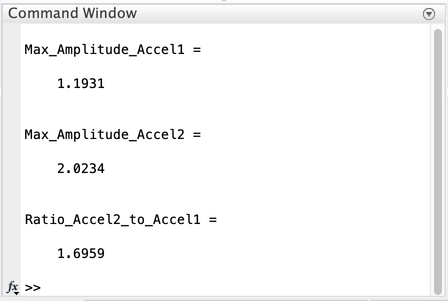
Hình 5. Ví dụ về kết quả MATLAB trong Cửa sổ lệnh, Hiệu ứng 1 (thứ nhất) và Hiệu ứng 3 (thứ hai)
Hiệu ứng 1 và Hiệu ứng 2 (xung ngắn)
- Thời lượng cao điểm (mili giây)
- Biên độ cao nhất (g)
- PRR để tính toán số liệu của các chỉ số về độ sắc nét (FOMS = PRR/thời lượng đỉnh)
Hiệu ứng 3 (rung lâu)
- Biên độ tối đa (g) cho 2 pha
So sánh kết quả bằng bản đồ hiệu suất bao gồm cùng một bộ dữ liệu thu được từ các thiết bị đại diện trong hệ sinh thái Android, nhờ đó, bạn có thể điền sẵn bản đồ hiệu suất cho phù hợp. Điều này giúp bạn hiểu toàn bộ hệ sinh thái và điều chỉnh dữ liệu của mình cho phù hợp với dữ liệu trên bản đồ hiệu suất để so sánh.
Hãy tham khảo bảng sau để biết DUT của bạn so với các điện thoại hoặc máy tính bảng khác trong hệ sinh thái Android như thế nào. Một câu hỏi cụ thể được xây dựng dựa trên khái niệm đó sẽ có dạng như sau: So với các điện thoại Android khác có đặc điểm tương tự (chẳng hạn như mức giá), điện thoại của tôi hoạt động hiệu quả hơn hay kém hiệu quả hơn so với các điện thoại khác?
| [Đầu vào] Các hiệu ứng cần phân tích |
[Đầu ra] Biên độ tối đa/đỉnh (G) |
[Đầu ra] Thời lượng cao điểm (mili giây) | [Đầu ra] Tỷ lệ xung đến chuông (PRR) |
|---|---|---|---|
Hiệu ứng 1: Hằng số xúc giác được xác định trước (VibrationEffect.EFFECT_CLICK) |
[1] Dữ liệu 1-1 | [2] Dữ liệu 1-2 | [3] Dữ liệu 1-3 |
| Hiệu ứng 2: Hiệu ứng xúc giác tuỳ chỉnh ngắn (thời lượng = 20 mili giây, biên độ = 100%) | [4] Dữ liệu 2-1 | [5] Dữ liệu 2-2 | [6] Dữ liệu 2-3 |
| Hiệu ứng 3-1: Hiệu ứng xúc giác tuỳ chỉnh dài Giai đoạn 1 của gia tốc với biên độ 50% trong 500 mili giây đầu tiên | [7] Dữ liệu 3-1 | Không có | Không có |
| Hiệu ứng 3-2: Hiệu ứng xúc giác tuỳ chỉnh dài Giai đoạn tăng tốc 2 với biên độ 100% trong 500 mili giây thứ hai | [8] Dữ liệu 3-2 | Không có | Không có |
Tỷ lệ xung trên chuông và biên độ đỉnh cho Hiệu ứng 1 và Hiệu ứng 2
Hai thông số chính được đo trong Hiệu ứng 1 và Hiệu ứng 2 là tỷ lệ xung đến chuông (PRR) và biên độ đỉnh. Các thông số này dựa trên phép đo gia tốc do thiết lập gia tốc kế thực hiện.
PRR được tính bằng cách lấy tỷ lệ giữa xung chính và biên độ chuông. Thời lượng là thời gian đã trôi qua của nhịp chính. Công thức tính PRR là:
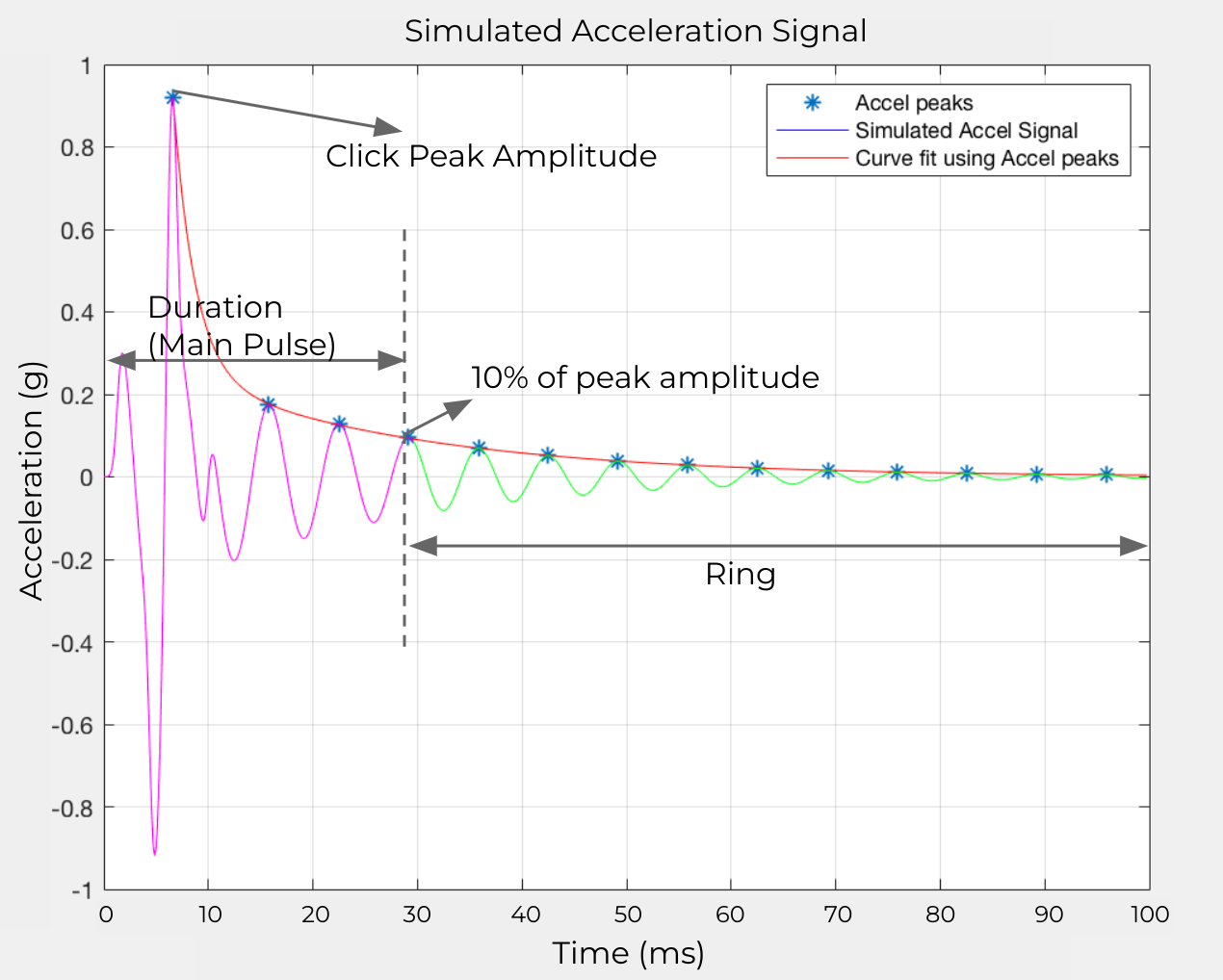
Hình 6. Tín hiệu gia tốc mô phỏng
Các phần tử này được minh hoạ trong Hình 6:
- Xung chính: Được xác định bằng tín hiệu trong khoảng thời gian mà biên độ giảm xuống 10% biên độ đỉnh.
Thời gian đổ chuông: Được xác định bằng tín hiệu có biên độ giảm từ 10% biên độ đỉnh xuống dưới 1% biên độ đỉnh.
Tính PRR và thời lượng: Tạo đường cong phù hợp sử dụng các điểm cực đại của từng khoảng thời gian tăng tốc. Phương pháp phù hợp nhất để thực hiện việc này là điều chỉnh đường cong vì phương pháp này giúp cải thiện khả năng lặp lại của thử nghiệm bằng cách giảm thiểu ảnh hưởng của nhiễu.
Biên độ tối đa cho Hiệu ứng 3
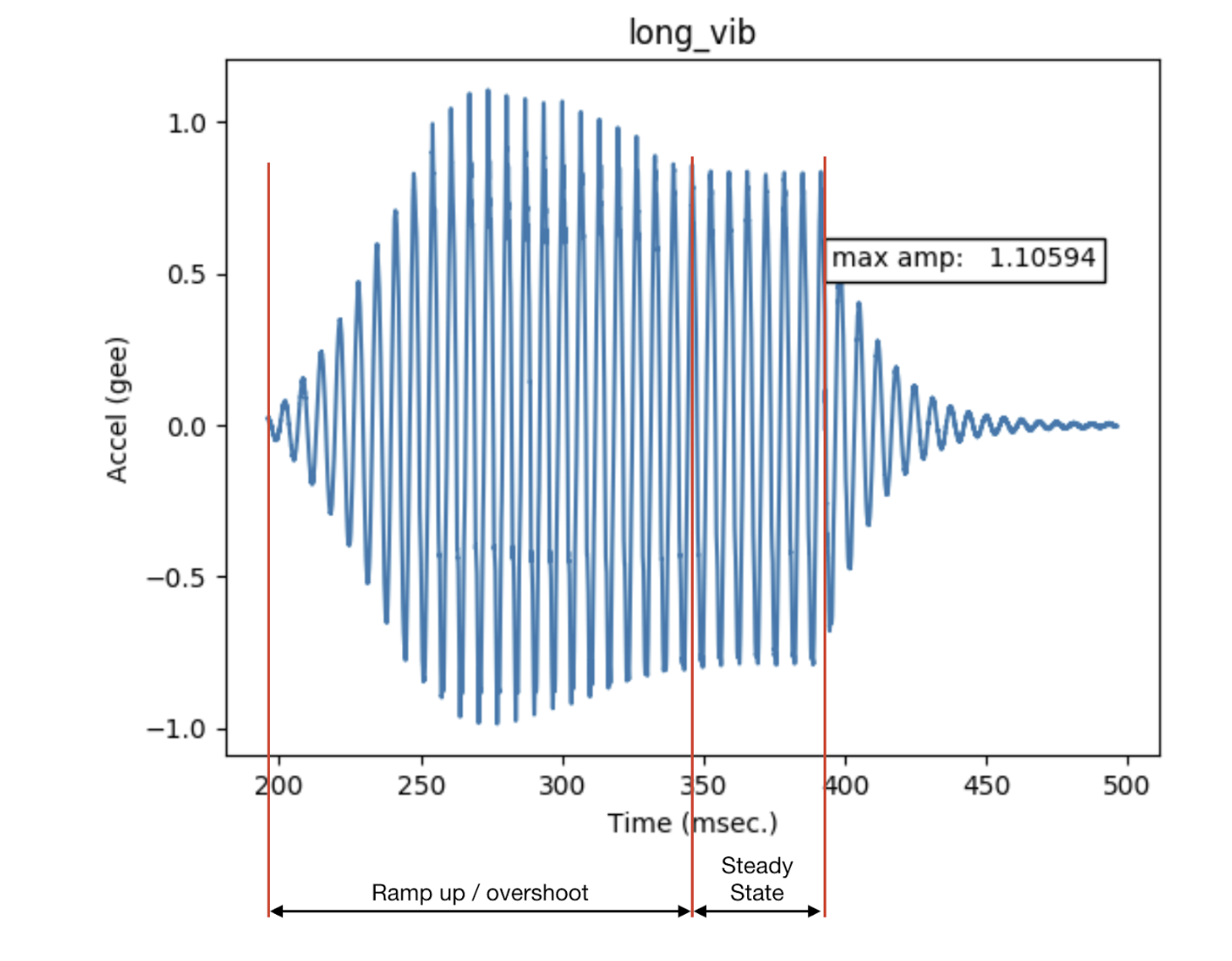
Hình 7. Bộ truyền động vượt quá
Hình 7 minh hoạ các phần tử này:
- Rung lâu
- Đầu ra từ bộ truyền động cộng hưởng tuyến tính khi áp dụng đầu vào hình sin, ở tần số cộng hưởng.
- Biên độ tối đa
- Biên độ tối đa của chế độ rung dài, khi chế độ rung của thiết bị ở trạng thái ổn định.
- Overshoot
- Hiện tượng dao động quá mức xảy ra khi bộ truyền động bị đẩy ra khỏi cộng hưởng. Hình này cho thấy loại hành vi xảy ra khi bộ rung được điều khiển ra khỏi cộng hưởng bằng một đầu vào hình sin. Đây là một ví dụ về mức độ vượt quá cực đoan.
- Bạn có thể thấy hiện tượng dao động tối thiểu hoặc không có dao động khi LRA được điều khiển ở tần số cộng hưởng. Tần số cộng hưởng điển hình của LRA là từ 50 đến 250 Hz.