
Por lo general, se considera que los fabricantes de dispositivos son los propietarios de los recursos privados creados para cada dispositivo. Por lo tanto, sus esfuerzos de ingeniería suelen enfocarse en cada dispositivo ; se dedica poco o ningún esfuerzo a la coherencia de otros dispositivos en el ecosistema.
Por el contrario, los desarrolladores se esfuerzan por compilar apps que funcionen en todos los teléfonos Android del ecosistema, independientemente de las especificaciones técnicas de cada dispositivo. Esta diferencia en el enfoque puede causar un problema de fragmentación. Por ejemplo, las capacidades de hardware de ciertos teléfonos no coinciden con las expectativas establecidas por los desarrolladores de la app. Por lo tanto, si las APIs de Haptics funcionan en algunos teléfonos Android, pero no en otros, el resultado es un ecosistema incoherente. Por este motivo, la configuración de hardware desempeña un papel fundamental para garantizar que los fabricantes puedan implementar las APIs de Haptics de Android en todos los dispositivos.
En esta página, se proporciona una lista de tareas paso a paso para configurar el cumplimiento de hardware para el mejor uso de las APIs de Haptics de Android.
En la siguiente figura, se ilustra la creación de conocimiento común entre los fabricantes de dispositivos y los desarrolladores, que es un paso fundamental para crear un ecosistema cohesivo:
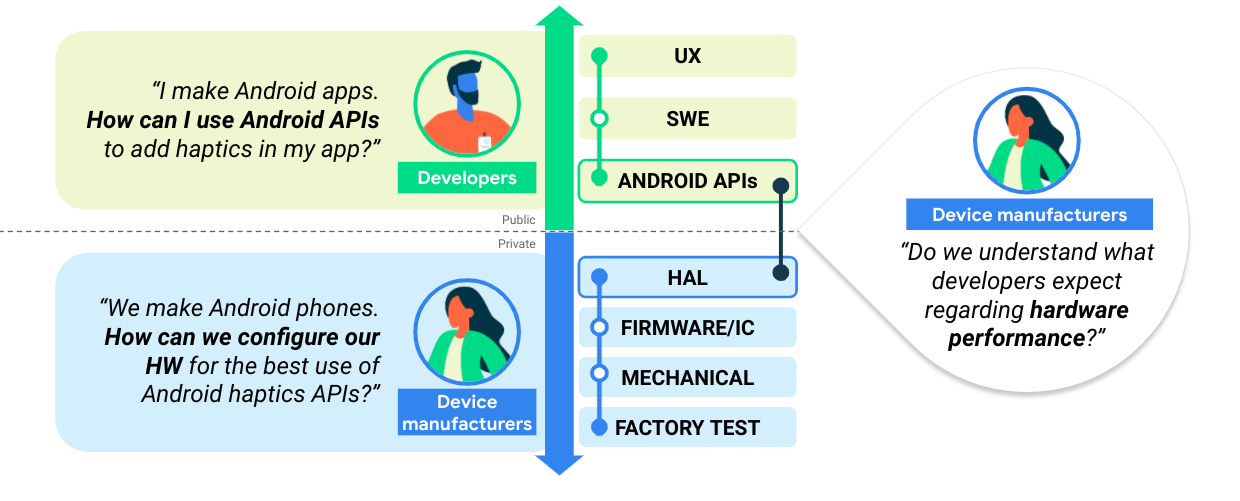
Figura 1: Creación de conocimiento entre los fabricantes de dispositivos y los desarrolladores
Lista de tareas para la implementación de Haptics
-
- Lista de constantes para implementar Haptics
-
- Orientación para la implementación de primitivas de composición de HAL
Asignar constantes entre HAL y la API
- Recomendaciones de asignación entre constantes de la API pública (denominadas marcadores de posición en el framework) y constantes de HAL, que implementan los marcadores de posición
- Consulta Principios de diseño para guiar la asignación recomendada para obtener más información sobre este proceso.
Implementar efectos de envolvente lineal por partes (PWLE)
- Orientación para la implementación de envolventes de amplitud y frecuencia
-
- Instrucciones sobre los efectos hápticos de destino Usa estas instrucciones para realizar verificaciones rápidas en tu hardware.