
Nhà sản xuất thiết bị thường được coi là chủ sở hữu của các tài sản riêng tư được tạo cho từng thiết bị. Do đó, nỗ lực kỹ thuật của họ thường tập trung vào từng thiết bị; ít hoặc không có nỗ lực nào dành cho tính nhất quán của các thiết bị khác trong hệ sinh thái.
Ngược lại, nhà phát triển cố gắng xây dựng các ứng dụng hoạt động trên tất cả điện thoại Android trong hệ sinh thái, bất kể thông số kỹ thuật của từng thiết bị. Sự khác biệt này trong cách tiếp cận có thể gây ra vấn đề về phân mảnh, ví dụ: khả năng phần cứng của một số điện thoại không đáp ứng được kỳ vọng do nhà phát triển ứng dụng đặt ra. Vì vậy, nếu API phản hồi xúc giác hoạt động trên một số điện thoại Android nhưng không hoạt động trên các điện thoại khác, thì kết quả là một hệ sinh thái không nhất quán. Đây là lý do tại sao cấu hình phần cứng đóng vai trò quan trọng trong việc đảm bảo rằng nhà sản xuất có thể triển khai API phản hồi xúc giác của Android trên mọi thiết bị.
Trang này cung cấp danh sách kiểm tra từng bước để thiết lập khả năng tuân thủ phần cứng nhằm sử dụng API phản hồi xúc giác của Android một cách hiệu quả nhất.
Hình sau đây minh hoạ việc xây dựng kiến thức chung giữa nhà sản xuất thiết bị và nhà phát triển, đây là một bước quan trọng trong việc tạo ra một hệ sinh thái gắn kết:
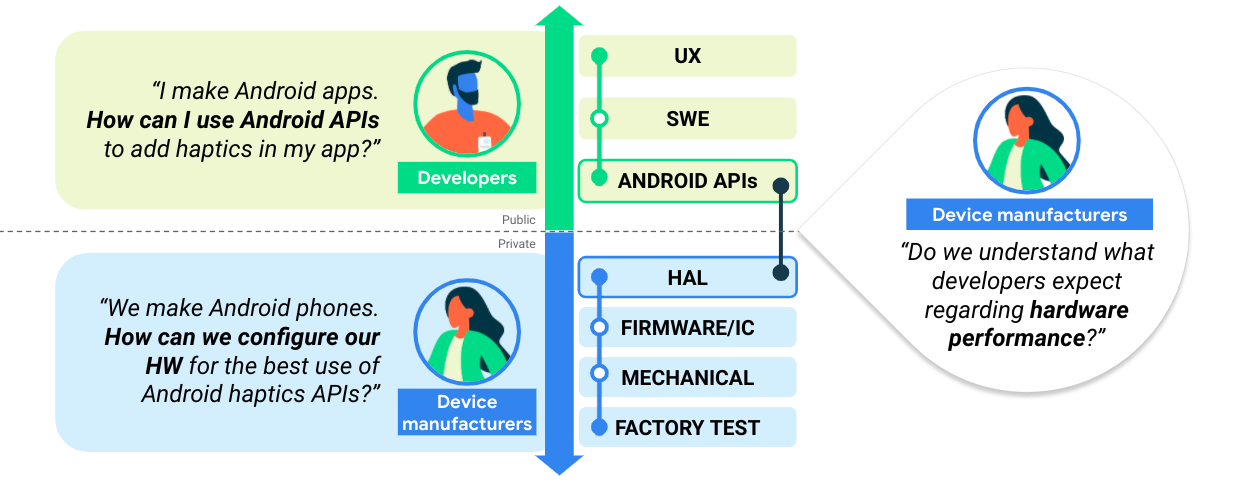
Hình 1. Xây dựng kiến thức giữa nhà sản xuất thiết bị và nhà phát triển
Danh sách kiểm tra việc triển khai phản hồi xúc giác
-
- Danh sách hằng số để triển khai phản hồi xúc giác.
Triển khai các thành phần cơ bản
- Hướng dẫn triển khai cho các thành phần cơ bản của cấu trúc HAL.
Ánh xạ hằng số giữa HAL và API
- Đề xuất ánh xạ giữa các hằng số API công khai (được đặt tên là trình giữ chỗ trong khung) và các hằng số HAL, triển khai trình giữ chỗ.
- Hãy xem Nguyên tắc thiết kế để hướng dẫn ánh xạ được đề xuất nhằm tìm hiểu thêm về quy trình này.
Triển khai hiệu ứng bao tuyến tính từng phần (PWLE)
- Hướng dẫn triển khai cho bao tần số và biên độ.
-
- Hướng dẫn về các hiệu ứng phản hồi xúc giác mục tiêu. Hãy sử dụng các hướng dẫn này để kiểm tra nhanh phần cứng.