
W tej sekcji opisujemy osie czujników, czujniki podstawowe i czujniki złożone (aktywności, orientacji, niekalibrowane i interakcji).
Osie czujnika
Wartości zdarzeń z wielu czujników są wyrażane w określonej ramce, która jest statyczna względem urządzenia.
Osie urządzenia mobilnego
Interfejs Sensor API jest względny tylko w stosunku do naturalnej orientacji ekranu (osie nie są zamieniane, gdy zmienia się orientacja ekranu urządzenia).

Rysunek 1. Układ współrzędnych (względem urządzenia mobilnego) używany przez interfejs Sensor API
Motoryzacja – osie
W implementacjach Androida Automotive osie są zdefiniowane względem ramy nadwozia pojazdu. Początek układu odniesienia pojazdu znajduje się na środku tylnej osi. Układ odniesienia pojazdu jest zorientowany w taki sposób, aby:
- Oś X jest skierowana w prawo i znajduje się w płaszczyźnie poziomej, prostopadłej do płaszczyzny symetrii pojazdu.
- Oś Y jest skierowana do przodu i znajduje się w płaszczyźnie poziomej.
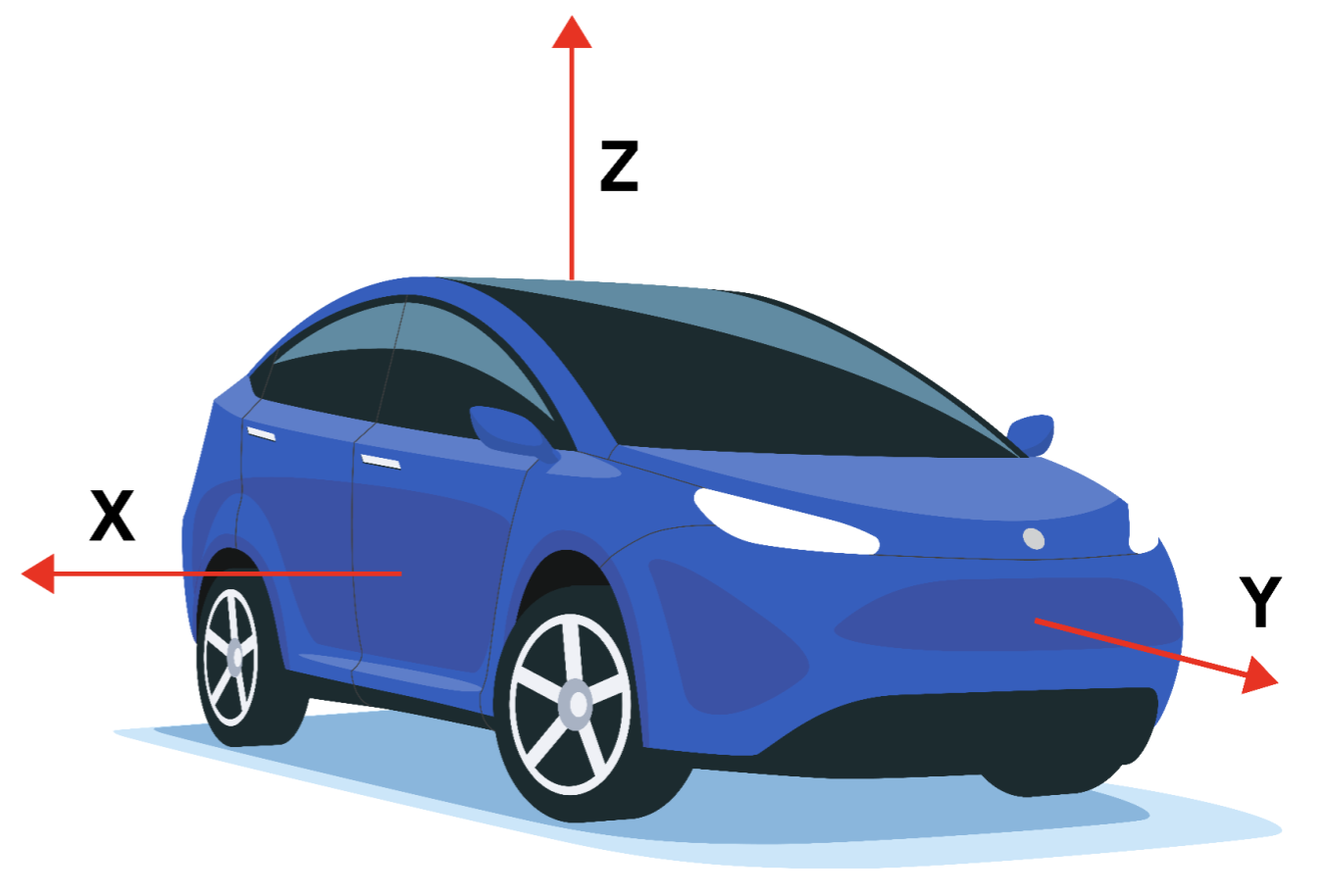
Rysunek 2. Układ współrzędnych (względem urządzenia samochodowego) używany przez interfejs Sensor API
Układ odniesienia pojazdu to prawoskrętny układ współrzędnych. Oś Z jest więc skierowana w górę.
Oś Z układu odniesienia jest wyrównana z kierunkiem grawitacji, co oznacza, że osie X i Y są poziome. W rezultacie oś Y nie zawsze przechodzi przez przednią oś.
Czujniki podstawowe
Podstawowe typy czujników są nazwane na podstawie fizycznych czujników, które reprezentują. Te czujniki przekazują dane z jednego czujnika fizycznego (w przeciwieństwie do czujników złożonych, które generują dane na podstawie innych czujników). Przykłady podstawowych typów czujników:
SENSOR_TYPE_ACCELEROMETERSENSOR_TYPE_GYROSCOPESENSOR_TYPE_MAGNETOMETER
Czujniki podstawowe nie są jednak równoznaczne z czujnikami fizycznymi, na których są oparte, i nie należy ich z nimi mylić. Dane z czujnika podstawowego nie są surowymi danymi wyjściowymi z czujnika fizycznego, ponieważ są korygowane (np. kompensacja odchylenia i temperatury).
Na przykład w tych przypadkach charakterystyka czujnika bazowego może się różnić od charakterystyki czujnika fizycznego, na którym jest oparty:
- Żyroskop o zakresie odchylenia 1 stopień/sekundę.
- Po kalibracji fabrycznej, kompensacji temperatury i kompensacji odchylenia rzeczywiste odchylenie czujnika Androida zostanie zmniejszone, być może do takiego stopnia, że odchylenie będzie na pewno mniejsze niż 0,01 stopnia na sekundę.
- W takiej sytuacji mówimy, że odchylenie czujnika Androida jest mniejsze niż 0,01 stopnia na sekundę, mimo że w specyfikacji bazowego czujnika podano wartość 1 stopień na sekundę.
- Barometr o poborze mocy 100 uW.
- Ponieważ wygenerowane dane muszą być przesyłane z układu do SoC, rzeczywisty koszt energii potrzebnej do zebrania danych z barometru czujnika Androida może być znacznie wyższy, np. 1000 uW.
- W takiej sytuacji mówimy, że czujnik Androida zużywa 1000 uW, mimo że zużycie energii zmierzone na stykach układu barometru wynosi 100 uW.
- Magnetometr, który po kalibracji zużywa 100 μW, ale podczas kalibracji zużywa więcej energii.
- Procedura kalibracji może wymagać aktywowania żyroskopu, co zużywa 5000 uW, oraz uruchomienia algorytmu, co kosztuje kolejne 900 uW.
- W takiej sytuacji mówimy, że maksymalne zużycie energii przez czujnik Androida (magnetometr) wynosi 6000 uW.
- W takim przypadku bardziej przydatnym pomiarem jest średnie zużycie energii, które jest zgłaszane w statycznych charakterystykach czujnika za pomocą HAL.
Akcelerometr
Tryb raportowania: Ciągły
getDefaultSensor(SENSOR_TYPE_ACCELEROMETER)
zwraca czujnik, który nie wybudza urządzenia
Akcelerometr podaje przyspieszenie urządzenia wzdłuż 3 osi czujnika. Mierzone przyspieszenie obejmuje zarówno przyspieszenie fizyczne (zmianę prędkości), jak i grawitację. Pomiar jest zgłaszany w polach x, y i z struktury sensors_event_t.acceleration.
Wszystkie wartości są podawane w jednostkach SI (m/s²) i mierzą przyspieszenie urządzenia pomniejszone o siłę grawitacji wzdłuż 3 osi czujnika.
Przykłady:
- Podczas swobodnego spadania norma (x, y, z) powinna być bliska 0.
- Gdy urządzenie leży płasko na stole i jest przesuwane w lewo w prawo, wartość przyspieszenia w osi X jest dodatnia.
- Gdy urządzenie leży płasko na stole, wartość przyspieszenia wzdłuż osi z wynosi +9,81 m/s², co odpowiada przyspieszeniu urządzenia (0 m/s²) pomniejszonemu o siłę grawitacji (-9,81 m/s²).
- Gdy urządzenie leży płasko na stole i jest popychane w górę, wartość przyspieszenia jest większa niż +9,81, co odpowiada przyspieszeniu urządzenia (+A m/s²) pomniejszonemu o siłę grawitacji (-9,81 m/s²).
Odczyty są kalibrowane za pomocą:
- Kompensacja temperatury
- Kalibracja odchyleń online
- Kalibracja wagi online
Kalibrację odchylenia i skali należy aktualizować tylko wtedy, gdy czujnik jest wyłączony, aby uniknąć skoków wartości podczas przesyłania strumieniowego.
Akcelerometr podaje też oczekiwaną dokładność odczytów za pomocą wartości sensors_event_t.acceleration.status. Więcej informacji o możliwych wartościach tego pola znajdziesz w stałych
SensorManager
SENSOR_STATUS_*.
Temperatura otoczenia
Tryb raportowania: On-change
getDefaultSensor(SENSOR_TYPE_AMBIENT_TEMPERATURE)
zwraca czujnik, który nie wybudza urządzenia
Ten czujnik podaje temperaturę otoczenia (pomieszczenia) w stopniach Celsjusza.
Czujnik pola magnetycznego
Tryb raportowania: Ciągły
getDefaultSensor(SENSOR_TYPE_MAGNETIC_FIELD)
zwraca czujnik, który nie wybudza urządzenia
SENSOR_TYPE_GEOMAGNETIC_FIELD == SENSOR_TYPE_MAGNETIC_FIELD
Czujnik pola magnetycznego (zwany też magnetometrem) podaje informacje o polu magnetycznym otoczenia mierzone wzdłuż 3 osi czujnika.
Pomiar jest podawany w polach x, y i z elementu sensors_event_t.magnetic, a wszystkie wartości są wyrażone w mikroteslach (uT).
Magnetometr podaje też oczekiwaną dokładność odczytów za pomocą wartości sensors_event_t.magnetic.status. Więcej informacji o możliwych wartościach tego pola znajdziesz w stałych
SensorManager
SENSOR_STATUS_*.
Odczyty są kalibrowane za pomocą:
- Kompensacja temperatury
- Kalibracja w fabryce (lub online)
- Kalibracja online twardego żelaza
Żyroskop
Tryb raportowania: Ciągły
getDefaultSensor(SENSOR_TYPE_GYROSCOPE)
zwraca czujnik, który nie wybudza urządzenia
Żyroskop podaje szybkość obrotu urządzenia wokół 3 osi czujnika.
Obrót w kierunku przeciwnym do ruchu wskazówek zegara jest dodatni (reguła prawej dłoni). Oznacza to, że obserwator patrzący z dowolnego miejsca na osi x, y lub z na urządzenie umieszczone w punkcie początkowym zgłosiłby obrót w kierunku dodatnim, gdyby urządzenie obracało się w kierunku przeciwnym do ruchu wskazówek zegara. Pamiętaj, że jest to standardowa definicja matematyczna rotacji dodatniej, która nie jest zgodna z definicją przechyłu w przemyśle lotniczym.
Pomiar jest podawany w polach x, y i z elementu sensors_event_t.gyro, a wszystkie wartości są wyrażone w radianach na sekundę (rad/s).
Odczyty są kalibrowane za pomocą:
- Kompensacja temperatury
- Wynagrodzenie na poziomie fabryki (lub online)
- Kalibracja odchylenia online (aby usunąć dryf)
Żyroskop podaje też oczekiwaną dokładność odczytów za pomocą parametru sensors_event_t.gyro.status. Więcej informacji o możliwych wartościach tego pola znajdziesz w stałych
SensorManager
SENSOR_STATUS_*.
Żyroskopu nie można emulować na podstawie magnetometrów i akcelerometrów, ponieważ spowodowałoby to zmniejszenie lokalnej spójności i reaktywności. Musi być oparty na zwykłym chipie żyroskopu.
Tętno
Tryb raportowania: On-change
getDefaultSensor(SENSOR_TYPE_HEART_RATE)
zwraca czujnik, który nie wybudza urządzenia
Czujnik tętna podaje aktualne tętno osoby dotykającej urządzenia.
Aktualne tętno w uderzeniach na minutę (uderz./min) jest podawane w sensors_event_t.heart_rate.bpm, a stan czujnika w sensors_event_t.heart_rate.status. Więcej informacji o możliwych wartościach tego pola znajdziesz w stałych
SensorManager
SENSOR_STATUS_*. W szczególności podczas pierwszej aktywacji, o ile nie wiadomo, że urządzenie nie jest na ciele, pole stanu pierwszego zdarzenia musi mieć wartość SENSOR_STATUS_UNRELIABLE. Ponieważ ten czujnik jest oparty na zmianach, zdarzenia są generowane tylko wtedy, gdy od ostatniego zdarzenia zmieniły się wartości heart_rate.bpm lub heart_rate.status. Zdarzenia są generowane nie częściej niż co sampling_period.
Platforma automatycznie zastępuje sensor_t.requiredPermission odpowiednimi uprawnieniami, aby zachować zgodność. W przypadku Androida 16 i nowszych wersji platforma korzysta z uprawnienia SENSOR_PERMISSION_READ_HEART_RATE, a w przypadku Androida 15 i starszych wersji – z uprawnienia SENSOR_PERMISSION_BODY_SENSORS.
Jasny
Tryb raportowania: On-change
getDefaultSensor(SENSOR_TYPE_LIGHT)
zwraca czujnik, który nie wybudza urządzenia
Czujnik światła podaje aktualne oświetlenie w jednostkach SI (luksach).
Pomiar jest raportowany w strumieniu sensors_event_t.light.
Bliskość
Tryb raportowania: On-change
Zwykle definiowany jako czujnik wybudzania
getDefaultSensor(SENSOR_TYPE_PROXIMITY)
zwraca czujnik wybudzania
Czujnik zbliżeniowy podaje odległość od czujnika do najbliższej widocznej powierzchni.
W przypadku Androida w wersji 4.4 i starszych czujniki zbliżeniowe zawsze były czujnikami wybudzającymi, które wybudzały układ SoC po wykryciu zmiany zbliżenia. W przypadku Androida 4.4 i nowszych zalecamy najpierw wdrożyć wersję tego czujnika, która wybudza urządzenie, ponieważ jest ona używana do włączania i wyłączania ekranu podczas rozmów telefonicznych.
Pomiar jest podawany w centymetrach w sensors_event_t.distance. Uwaga: niektóre czujniki zbliżeniowe obsługują tylko pomiar binarny „blisko” lub „daleko”.
W tym przypadku czujnik zgłasza wartość sensor_t.maxRange
w stanie „daleko” i wartość mniejszą niż sensor_t.maxRange w stanie „blisko”.
Ciśnienie
Tryb raportowania: Ciągły
getDefaultSensor(SENSOR_TYPE_PRESSURE)
zwraca czujnik, który nie wybudza urządzenia
Czujnik ciśnienia (zwany też barometrem) podaje ciśnienie atmosferyczne w hektopaskalach (hPa).
Odczyty są kalibrowane za pomocą
- Kompensacja temperatury
- Kalibracja odchylenia fabrycznego
- Kalibracja wagi w fabryce
Barometr jest często używany do szacowania zmian wysokości. Aby oszacować wysokość bezwzględną, należy użyć ciśnienia na poziomie morza (zmieniającego się w zależności od pogody) jako wartości referencyjnej.
Wilgotność względna
Tryb raportowania: On-change
getDefaultSensor(SENSOR_TYPE_RELATIVE_HUMIDITY)
zwraca czujnik, który nie wybudza urządzenia
Czujnik wilgotności względnej mierzy względną wilgotność powietrza w otoczeniu i zwraca wartość w procentach.
Złożone typy czujników
Czujnik złożony generuje dane, przetwarzając lub łącząc dane z jednego lub kilku czujników fizycznych. (Każdy czujnik, który nie jest czujnikiem podstawowym, nazywa się czujnikiem złożonym). Przykłady czujników złożonych:
- Detektor kroków i wykrywanie znaczących ruchów, które zwykle działają na podstawie akcelerometru, ale mogą też korzystać z innych czujników, jeśli zużycie energii i dokładność są akceptowalne.
- Wektor rotacji gry, na podstawie akcelerometru i żyroskopu.
- Nie skalibrowany żyroskop, który jest podobny do czujnika żyroskopu podstawy, ale kalibracja odchylenia jest raportowana oddzielnie zamiast być korygowana w pomiarze.
Podobnie jak w przypadku czujników podstawowych, charakterystyka czujników złożonych wynika z charakterystyki danych końcowych. Na przykład zużycie energii przez wektor rotacji gry jest prawdopodobnie równe sumie zużycia energii przez układ akcelerometru, układ żyroskopu, układ przetwarzający dane i magistrale przesyłające dane. Innym przykładem jest dryf wektora rotacji gry, który zależy w równym stopniu od jakości algorytmu kalibracji, jak i od charakterystyki fizycznej czujnika.
W tabeli poniżej znajdziesz listę dostępnych typów czujników złożonych. Każdy czujnik złożony korzysta z danych z jednego lub kilku czujników fizycznych. Unikaj wybierania innych fizycznych czujników do przybliżania wyników, ponieważ pogarsza to komfort użytkownika.
| Typ czujnika | Kategoria | Czujniki fizyczne | Tryb raportowania |
|---|---|---|---|
Postawa |
Akcelerometr, żyroskop, NIE UŻYWAJ magnetometru |
Ciągły |
|
Postawa |
Akcelerometr, magnetometr, NIE UŻYWAJ żyroskopu |
Ciągły |
|
| Gest szybkiego podglądu |
Interakcja |
Nie określono |
One-shot |
Postawa |
akcelerometr, żyroskop (jeśli jest dostępny) lub magnetometr (jeśli żyroskop nie jest dostępny); |
Ciągły |
|
Nieskalibrowany |
Żyroskop |
Ciągły |
|
Aktywność |
akcelerometr, żyroskop (jeśli jest dostępny) lub magnetometr (jeśli żyroskop nie jest dostępny); |
Ciągły |
|
Nieskalibrowany |
Magnetometr |
Ciągły |
|
Orientation (wycofana) |
Postawa |
akcelerometr, magnetometr, żyroskop (jeśli jest dostępny); |
Ciągły |
Interakcja |
Nie określono |
One-shot |
|
Postawa |
akcelerometr, magnetometr, żyroskop (jeśli jest dostępny); |
Ciągły |
|
Aktywność |
akcelerometr (lub inny czujnik o bardzo niskim poborze mocy); |
One-shot |
|
Aktywność |
Akcelerometr |
Przy zmianie |
|
Aktywność |
Akcelerometr |
Wydarzenia specjalne |
|
Aktywność |
Akcelerometr |
Wydarzenia specjalne |
|
Interakcja |
Nie określono |
One-shot |
![]() = Czujnik o niskim poborze mocy
= Czujnik o niskim poborze mocy
Złożone czujniki aktywności
Przyspieszenie liniowe
Czujniki fizyczne: akcelerometr i (jeśli jest) żyroskop (lub magnetometr, jeśli nie ma żyroskopu)
Tryb raportowania: Ciągły
getDefaultSensor(SENSOR_TYPE_LINEAR_ACCELERATION)
zwraca czujnik, który nie wybudza urządzenia
Czujnik przyspieszenia liniowego podaje przyspieszenie liniowe urządzenia w ramce czujnika, z wyłączeniem grawitacji.
Dane wyjściowe to w zasadzie dane wyjściowe z akcelerometru pomniejszone o dane wyjściowe z czujnika grawitacji. Jest on podawany w m/s² w polach x, y i z w sensors_event_t.acceleration.
Gdy urządzenie jest nieruchome, odczyty na wszystkich osiach powinny być bliskie 0.
Jeśli urządzenie ma żyroskop, czujnik przyspieszenia liniowego musi używać żyroskopu i akcelerometru jako danych wejściowych.
Jeśli urządzenie nie ma żyroskopu, czujnik przyspieszenia liniowego musi korzystać z akcelerometru i magnetometru jako danych wejściowych.
Znaczący ruch
Czujnik fizyczny: akcelerometr (lub inny, o ile zużywa mało energii)
Tryb raportowania: One-shot
Niski poziom energii
Zaimplementuj tylko wersję tego czujnika, która wybudza urządzenie.
getDefaultSensor(SENSOR_TYPE_SIGNIFICANT_MOTION)
zwraca czujnik wybudzania
Wykrywacz znaczących ruchów jest wywoływany, gdy wykryje znaczący ruch, czyli ruch, który może spowodować zmianę lokalizacji użytkownika.
Przykłady takich istotnych ruchów:
- pieszo lub rowerem,
- Siedzenie w jadącym samochodzie, autokarze lub pociągu
Przykłady sytuacji, które nie powodują znaczącego ruchu:
- Telefon w kieszeni, a osoba się nie porusza
- Telefon leży na stole, który lekko drży z powodu ruchu ulicznego lub pralki w pobliżu.
W dużym uproszczeniu detektor znacznego ruchu służy do zmniejszania zużycia energii podczas określania lokalizacji. Gdy algorytmy lokalizacji wykryją, że urządzenie jest nieruchome, mogą przejść w tryb niskiego zużycia energii, w którym do wybudzenia urządzenia, gdy użytkownik zmienia lokalizację, potrzebny jest znaczny ruch.
Ten czujnik musi być energooszczędny. W tym trybie zużycie energii jest mniejsze, ale może to powodować niewielką liczbę wyników fałszywie negatywnych. Dzieje się tak z kilku powodów:
- Celem tego czujnika jest oszczędzanie energii.
- Wywoływanie zdarzenia, gdy użytkownik się nie porusza (fałszywie dodatni wynik), jest kosztowne pod względem zużycia energii, więc należy go unikać.
- Nieuruchomienie zdarzenia, gdy użytkownik się porusza (fałszywie negatywny wynik), jest dopuszczalne, o ile nie powtarza się wielokrotnie. Jeśli użytkownik chodził przez 10 sekund, brak wywołania zdarzenia w tym czasie jest niedopuszczalny.
Każde zdarzenie czujnika zgłasza 1 w sensors_event_t.data[0].
Detektor kroków
Podstawowy czujnik fizyczny: akcelerometr (i ewentualnie inne, o ile mają niski pobór mocy)
Tryb raportowania: Specjalny (jedno zdarzenie na wykonany krok)
Niski poziom energii
getDefaultSensor(SENSOR_TYPE_STEP_DETECTOR)
zwraca czujnik, który nie wybudza urządzenia
Detektor kroków generuje zdarzenie za każdym razem, gdy użytkownik zrobi krok.
Sygnatura czasowa zdarzenia sensors_event_t.timestamp odpowiada momentowi, w którym stopa dotknęła podłoża, co spowodowało dużą zmianę przyspieszenia.
W porównaniu z licznikiem kroków detektor kroków powinien mieć mniejsze opóźnienie (poniżej 2 sekund). Zarówno detektor kroków, jak i licznik kroków wykrywają, kiedy użytkownik chodzi, biega i wchodzi po schodach. Nie powinny się one włączać, gdy użytkownik jedzie na rowerze, prowadzi samochód lub korzysta z innych pojazdów.
Ten czujnik musi być energooszczędny. Oznacza to, że jeśli wykrywanie kroków nie może być realizowane sprzętowo, ten czujnik nie powinien być zdefiniowany. W szczególności, gdy detektor kroków jest aktywny, a akcelerometr nie, tylko kroki powinny wywoływać przerwania (nie każde odczyty akcelerometru).
sampling_period_ns nie ma wpływu na detektory kroków.
Każde zdarzenie czujnika zgłasza 1 w sensors_event_t.data[0].
Licznik kroków
Podstawowy czujnik fizyczny: akcelerometr (i ewentualnie inne, o ile mają niski pobór mocy)
Tryb raportowania: On-change
Niskie zużycie energii
getDefaultSensor(SENSOR_TYPE_STEP_COUNTER)
zwraca czujnik, który nie wybudza urządzenia
Licznik kroków podaje liczbę kroków wykonanych przez użytkownika od ostatniego ponownego uruchomienia urządzenia, gdy był aktywny.
Wartość pomiaru jest podawana w uint64_t w sensors_event_t.step_counter i sensors_event_t.step_counter, a resetowana do zera tylko po ponownym uruchomieniu systemu.
Sygnatura czasowa zdarzenia jest ustawiana na czas wykonania ostatniego kroku tego zdarzenia.
Znaczenie czasu kroku znajdziesz w opisie typu czujnika wykrywacz kroków.
W porównaniu z detektorem kroków licznik kroków może mieć większe opóźnienie (do 10 sekund). Dzięki temu opóźnieniu czujnik ma wysoką dokładność. Liczba kroków po całym dniu pomiarów powinna mieścić się w zakresie 10% rzeczywistej liczby kroków. Zarówno detektor kroków, jak i licznik kroków wykrywają, kiedy użytkownik chodzi, biega i wchodzi po schodach. Nie powinny się one włączać, gdy użytkownik jeździ na rowerze, prowadzi samochód lub korzysta z innych pojazdów.
Sprzęt musi zapewniać, że wewnętrzna liczba kroków nigdy nie przekroczy limitu. Minimalny rozmiar wewnętrznego licznika sprzętowego musi wynosić 16 bitów. W przypadku zbliżającego się przepełnienia (maksymalnie co około 2^16 kroków) system SoC może zostać wybudzony, aby sterownik mógł przeprowadzić konserwację licznika.
Zgodnie z informacjami w sekcji Interakcja, podczas działania tego czujnika nie może on zakłócać pracy innych czujników, w szczególności akcelerometru, który może być w użyciu.
Jeśli dane urządzenie nie obsługuje tych trybów działania, HAL nie może zgłaszać tego typu czujnika. Oznacza to, że nie można „emulować” tego czujnika w HAL.
Ten czujnik musi być energooszczędny. Oznacza to, że jeśli wykrywanie kroków nie może być realizowane sprzętowo, ten czujnik nie powinien być zdefiniowany. W szczególności, gdy licznik kroków jest aktywny, a akcelerometr nie, tylko kroki powinny wywoływać przerwania (a nie dane z akcelerometru).
Czujnik przechyłu
Podstawowy czujnik fizyczny: akcelerometr (i ewentualnie inne, o ile mają niski pobór mocy)
Tryb raportowania: Specjalny
Niskie zużycie energii
Zaimplementuj tylko wersję tego czujnika, która wybudza urządzenie.
getDefaultSensor(SENSOR_TYPE_TILT_DETECTOR)
zwraca czujnik wybudzania
Detektor pochylenia generuje zdarzenie za każdym razem, gdy wykryje pochylenie.
Zdarzenie przechylenia jest definiowane przez kierunek średniej z 2-sekundowego okna, w którym siła grawitacji zmieniła się o co najmniej 35 stopni od momentu aktywacji lub ostatniego zdarzenia wygenerowanego przez czujnik. Algorytm wygląda tak:
reference_estimated_gravity= średnia pomiarów akcelerometru w pierwszej sekundzie po aktywacji lub szacunkowa siła grawitacji w momencie wygenerowania ostatniego zdarzenia związanego z przechyleniem.current_estimated_gravity= średnia pomiarów akcelerometru z ostatnich 2 sekund.- Wywołuj, gdy
angle(reference_estimated_gravity, current_estimated_gravity) > 35 degrees
Duże przyspieszenia bez zmiany orientacji telefonu nie powinny wywoływać zdarzenia przechylenia. Na przykład gwałtowny skręt lub silne przyspieszenie podczas jazdy samochodem nie powinny wywoływać zdarzenia przechylenia, nawet jeśli kąt średniego przyspieszenia może się różnić o ponad 35 stopni.
Zwykle ten czujnik jest
implementowany tylko za pomocą akcelerometru. Można też używać innych czujników, jeśli nie zwiększają one znacząco zużycia energii. Jest to czujnik o niskim poborze mocy, który powinien umożliwiać przejście układu SoC w tryb zawieszenia. Nie emuluj tego czujnika w HAL. Każde zdarzenie czujnika zgłasza 1 w sensors_event_t.data[0].
Złożone czujniki położenia
Wektor rotacji
Czujniki fizyczne: akcelerometr, magnetometr i żyroskop
Tryb raportowania: Ciągły
getDefaultSensor(SENSOR_TYPE_ROTATION_VECTOR) zwraca czujnik, który nie wybudza urządzenia
Czujnik wektora rotacji podaje orientację urządzenia względem układu współrzędnych wschód–północ–góra. Zwykle uzyskuje się ją przez integrację odczytów akcelerometru, żyroskopu i magnetometru. Układ współrzędnych wschód-północ-góra jest zdefiniowany jako bezpośrednia baza ortonormalna, w której:
- X wskazuje kierunek wschodni i jest styczny do podłoża.
- Oś Y jest skierowana na północ i jest styczna do podłoża.
- Oś Z jest skierowana w górę i prostopadła do podłoża.
Orientację telefonu określa obrót niezbędny do wyrównania współrzędnych wschodnich, północnych i górnych ze współrzędnymi telefonu. Oznacza to, że zastosowanie obrotu do układu współrzędnych świata (X,Y,Z) spowoduje jego wyrównanie z układem współrzędnych telefonu (x,y,z).
Obrót można traktować jako obracanie telefonu o kąt theta wokół osi rot_axis, aby przejść od referencyjnej (wyrównanej do kierunków wschód–północ–góra) orientacji urządzenia do bieżącej orientacji urządzenia. Rotacja jest zakodowana jako 4 bezjednostkowe komponenty x, y, z, w kwaternionu jednostkowego:
sensors_event_t.data[0] = rot_axis.x*sin(theta/2)sensors_event_t.data[1] = rot_axis.y*sin(theta/2)sensors_event_t.data[2] = rot_axis.z*sin(theta/2)sensors_event_t.data[3] = cos(theta/2)
Gdzie:
- Pola x, y i z w
rot_axisto współrzędne wektora jednostkowego w układzie wschód-północ-góra, który reprezentuje oś obrotu. thetato kąt obrotu.
Kwaternion jest kwaternionem jednostkowym: jego norma musi wynosić 1.
Jeśli tego nie zrobisz, klient może zachowywać się nieprzewidywalnie.
Dodatkowo ten czujnik podaje szacunkową dokładność kierunku:
sensors_event_t.data[4] = estimated_accuracy (w radianach)
Błąd kierunku musi występować w mniej niż estimated_accuracy 95% przypadków. Ten czujnik musi używać żyroskopu jako głównego źródła danych o zmianie orientacji.
Ten czujnik wykorzystuje też dane z akcelerometru i magnetometru, aby kompensować dryf żyroskopu. Nie można go zaimplementować, używając tylko akcelerometru i magnetometru.
Wektor rotacji gry
Czujniki fizyczne: akcelerometr i żyroskop (bez magnetometru)
Tryb raportowania: Ciągły
getDefaultSensor(SENSOR_TYPE_GAME_ROTATION_VECTOR)
zwraca czujnik, który nie wybudza urządzenia
Czujnik wektora rotacji gry jest podobny do czujnika wektora rotacji, ale nie korzysta z pola geomagnetycznego. Oś Y nie jest więc skierowana na północ, ale w innym kierunku. Odchylenie od tego punktu odniesienia może być tego samego rzędu co odchylenie żyroskopu wokół osi Z.
Więcej informacji o konfigurowaniu wartości sensors_event_t.data[0-3] znajdziesz w artykule o wektorze rotacji. Ten czujnik nie podaje szacowanej dokładności kierunku: pole sensors_event_t.data[4] jest zarezerwowane i powinno mieć wartość 0.
W idealnym przypadku telefon obrócony i przywrócony do tego samego położenia w świecie rzeczywistym powinien zgłaszać ten sam wektor rotacji gry.
Czujnik musi być oparty na żyroskopie i akcelerometrze. Nie może używać magnetometru jako danych wejściowych, z wyjątkiem pośredniego szacowania odchylenia żyroskopu.
Grawitacja
Czujniki fizyczne: akcelerometr i (jeśli jest) żyroskop (lub magnetometr, jeśli nie ma żyroskopu)
Tryb raportowania: Ciągły
getDefaultSensor(SENSOR_TYPE_GRAVITY)
zwraca czujnik, który nie wybudza urządzenia
Czujnik grawitacji podaje kierunek i wartość siły grawitacji w układzie współrzędnych urządzenia.
Składowe wektora grawitacji są podawane w m/s² w polach x, y i z w sensors_event_t.acceleration.
Gdy urządzenie jest w spoczynku, dane wyjściowe czujnika grawitacji powinny być identyczne z danymi akcelerometru. Na Ziemi wynosi ona około 9, 8 m/s².
Jeśli urządzenie ma żyroskop, czujnik grawitacji musi używać żyroskopu i akcelerometru jako danych wejściowych.
Jeśli urządzenie nie ma żyroskopu, czujnik grawitacji musi korzystać z akcelerometru i magnetometru jako danych wejściowych.
Wektor rotacji geomagnetycznej
Czujniki fizyczne: akcelerometr i magnetometr (bez żyroskopu)
Tryb raportowania: Ciągły
Niskie zużycie energii
getDefaultSensor(SENSOR_TYPE_GEOMAGNETIC_ROTATION_VECTOR)
zwraca czujnik, który nie wybudza urządzenia
Wektor rotacji geomagnetycznej jest podobny do czujnika wektora rotacji, ale korzysta z magnetometru i nie ma żyroskopu.
Ten czujnik musi być oparty na magnetometrze. Nie można go zaimplementować za pomocą żyroskopu, a dane wejściowe z żyroskopu nie mogą być używane przez ten czujnik.
Więcej informacji o konfigurowaniu wartości sensors_event_t.data[0-4] znajdziesz w artykule o wektorze rotacji.
Podobnie jak w przypadku czujnika wektora rotacji, błąd kierunku musi być mniejszy niż szacowana dokładność (sensors_event_t.data[4]) w 95% przypadków.
Ten czujnik musi zużywać mało energii, więc musi być zaimplementowany w sprzęcie.
Orientacja (wycofana)
Czujniki fizyczne: akcelerometr, magnetometr i (jeśli jest) żyroskop
Tryb raportowania: Ciągły
getDefaultSensor(SENSOR_TYPE_ORIENTATION)
zwraca czujnik, który nie wybudza urządzenia
Uwaga: jest to starszy typ czujnika, który został wycofany z pakietu Android SDK. Został on zastąpiony przez czujnik wektora rotacji, który jest dokładniej zdefiniowany. W miarę możliwości używaj czujnika wektora rotacji zamiast czujnika orientacji.
Czujnik orientacji podaje położenie urządzenia. Pomiary są podawane w stopniach w polach x, y i z sensors_event_t.orientation:
sensors_event_t.orientation.x: azymut, czyli kąt między kierunkiem północy magnetycznej a osią Y wokół osi Z (0<=azimuth<360). 0=północ, 90=wschód, 180=południe, 270=zachód.sensors_event_t.orientation.y: pochylenie, obrót wokół osi X (-180<=pitch<=180), z wartościami dodatnimi, gdy oś Z przesuwa się w kierunku osi Y.sensors_event_t.orientation.z: obrót wokół osi Y (-90<=roll<=90), z wartościami dodatnimi, gdy oś X przesuwa się w kierunku osi Z.
Pamiętaj, że z przyczyn historycznych kąt przechyłu jest dodatni w kierunku zgodnym z ruchem wskazówek zegara. (Matematycznie rzecz biorąc, powinna być dodatnia w kierunku przeciwnym do ruchu wskazówek zegara):
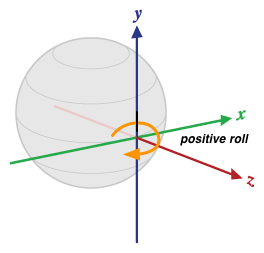
Rysunek 3. Orientacja względem urządzenia
Ta definicja różni się od odchylenia, pochylenia i przechylenia używanych w lotnictwie, gdzie oś X przebiega wzdłuż dłuższego boku samolotu (od ogona do nosa).
Czujnik orientacji podaje też oczekiwaną dokładność odczytów za pomocą wartości sensors_event_t.orientation.status. Więcej informacji o możliwych wartościach tego pola znajdziesz w stałych
SensorManager
SENSOR_STATUS_*.
Nie skalibrowane czujniki
Nie skalibrowane czujniki dostarczają więcej surowych wyników i mogą zawierać pewne odchylenia, ale także mniej „skoków” wynikających z korekt zastosowanych w ramach kalibracji. Niektóre aplikacje mogą preferować te niekalibrowane wyniki, ponieważ są one płynniejsze i bardziej wiarygodne. Jeśli na przykład aplikacja próbuje przeprowadzić własne łączenie danych z czujników, wprowadzenie kalibracji może zniekształcić wyniki.
Akcelerometr niekalibrowany
Podstawowy czujnik fizyczny: akcelerometr
Tryb raportowania: Ciągły
getDefaultSensor(SENSOR_TYPE_ACCELEROMETER_UNCALIBRATED)
zwraca czujnik, który nie wybudza urządzenia
Nie skalibrowany akcelerometr podaje przyspieszenie urządzenia wzdłuż 3 osi czujnika bez korekty odchylenia (do nie skalibrowanych pomiarów stosowane są odchylenie fabryczne i kompensacja temperatury) oraz szacunkowe odchylenie.
Wszystkie wartości są podawane w jednostkach SI (m/s²) i znajdują się w polach:sensors_event_t.uncalibrated_accelerometer
x_uncalib: przyspieszenie (bez kompensacji odchylenia) wzdłuż osi Xy_uncalib: przyspieszenie (bez kompensacji odchylenia) wzdłuż osi Yz_uncalib: przyspieszenie (bez kompensacji odchylenia) wzdłuż osi Zx_bias: szacowane odchylenie wzdłuż osi Xy_bias: szacowane odchylenie wzdłuż osi Yz_bias: szacowane odchylenie wzdłuż osi Z
Żyroskop nie jest skalibrowany
Czujnik fizyczny: żyroskop
Tryb raportowania: Ciągły
getDefaultSensor(SENSOR_TYPE_GYROSCOPE_UNCALIBRATED)
zwraca czujnik, który nie wybudza urządzenia
Nie skalibrowany żyroskop podaje szybkość obrotu wokół osi czujnika bez kompensacji odchylenia, a także szacunkowe odchylenie. Wszystkie wartości są podawane w radianach na sekundę i znajdują się w polach sensors_event_t.uncalibrated_gyro:
x_uncalib: prędkość kątowa (bez kompensacji dryfu) wokół osi Xy_uncalib: prędkość kątowa (bez kompensacji dryfu) wokół osi Yz_uncalib: prędkość kątowa (bez kompensacji dryfu) wokół osi Zx_bias: szacowane odchylenie wokół osi Xy_bias: szacunkowe odchylenie wokół osi Yz_bias: szacunkowe odchylenie wokół osi Z
Teoretycznie niekalibrowany pomiar to suma skalibrowanego pomiaru i oszacowania odchylenia: _uncalibrated = _calibrated + _bias.
Wartości x_bias, y_bias i z_bias powinny gwałtownie wzrosnąć, gdy tylko zmieni się szacunek odchylenia, a przez resztę czasu powinny być stabilne.
Szczegółowe informacje o używanym układzie współrzędnych znajdziesz w definicji czujnika żyroskopu.
Do pomiarów należy zastosować kalibrację fabryczną i kompensację temperatury. Musi też być zaimplementowane szacowanie dryfu żyroskopu, aby można było podawać rozsądne szacunki w przypadku x_bias, y_bias i z_bias. Jeśli implementacja nie jest w stanie oszacować dryfu, tego czujnika nie można zaimplementować.
Jeśli ten czujnik jest obecny, musi być też obecny odpowiedni czujnik żyroskopowy, a oba czujniki muszą mieć te same wartości sensor_t.name i sensor_t.vendor.
Pole magnetyczne (nieskalibrowane)
Podstawowy czujnik fizyczny: magnetometr
Tryb raportowania: Ciągły
getDefaultSensor(SENSOR_TYPE_MAGNETIC_FIELD_UNCALIBRATED)
zwraca czujnik, który nie wybudza urządzenia
Nieskalibrowany czujnik pola magnetycznego raportuje otaczające pole magnetyczne wraz z oszacowaniem kalibracji twardego żelaza. Wszystkie wartości są podawane w mikroteslach (uT) i wyświetlane w polach sensors_event_t.uncalibrated_magnetic:
x_uncalib: pole magnetyczne (bez kompensacji twardego żelaza) wzdłuż osi Xy_uncalib: pole magnetyczne (bez kompensacji twardego żelaza) wzdłuż osi Yz_uncalib: pole magnetyczne (bez kompensacji twardego żelaza) wzdłuż osi Zx_bias: szacowane odchylenie twardego żelaza wzdłuż osi Xy_bias: szacowane odchylenie twardego żelaza wzdłuż osi Yz_bias: szacowane odchylenie twardego żelaza wzdłuż osi Z
Teoretycznie niekalibrowany pomiar to suma skalibrowanego pomiaru i oszacowania odchylenia: _uncalibrated = _calibrated + _bias.
Nie skalibrowany magnetometr umożliwia algorytmom wyższego poziomu obsługę nieprawidłowych szacunków twardego żelaza. Wartości x_bias, y_bias i z_bias powinny gwałtownie wzrosnąć, gdy tylko zmieni się szacunkowa wartość twardego żelaza, a przez resztę czasu powinny być stabilne.
Do pomiarów należy zastosować kalibrację z użyciem miękkiego żelaza i kompensację temperatury. Należy też zaimplementować szacowanie twardego żelaza, aby można było podawać rozsądne szacunki w przypadku x_bias, y_bias i z_bias. Jeśli implementacja nie jest w stanie oszacować odchylenia, nie należy implementować tego czujnika.
Jeśli ten czujnik jest obecny, musi być też obecny odpowiedni czujnik pola magnetycznego, a oba czujniki muszą mieć te same wartości sensor_t.name i sensor_t.vendor.
Kąt zawiasu
Tryb raportowania: On-change
getDefaultSensor(SENSOR_TYPE_HINGE_ANGLE)
zwraca czujnik wybudzania
Czujnik kąta zawiasu mierzy kąt w stopniach między dwoma integralnymi częściami urządzenia. Ruch zawiasu mierzony przez ten typ czujnika powinien zmieniać sposób interakcji użytkownika z urządzeniem, np. przez rozkładanie lub odsłanianie wyświetlacza.
Złożone czujniki interakcji
Niektóre czujniki są używane głównie do wykrywania interakcji z użytkownikiem. Nie określamy, w jaki sposób te czujniki mają być wdrażane, ale muszą one zużywać mało energii. Za weryfikację ich jakości pod kątem wygody użytkownika odpowiada producent urządzenia.
Gest wybudzania
Czujniki fizyczne: nieokreślone (dowolne o niskim poborze mocy)
Tryb raportowania: One-shot
Niskie zużycie energii
Zaimplementuj tylko wersję tego czujnika, która wybudza urządzenie.
getDefaultSensor(SENSOR_TYPE_WAKE_GESTURE)
zwraca czujnik wybudzania
Czujnik gestów wybudzania umożliwia wybudzanie urządzenia na podstawie określonego ruchu. Gdy ten czujnik zostanie aktywowany, urządzenie zachowuje się tak, jakby naciśnięto przycisk zasilania, czyli włącza ekran. Użytkownik może wyłączyć to działanie (włączanie ekranu po aktywacji tego czujnika) w ustawieniach urządzenia. Zmiany ustawień nie wpływają na działanie czujnika, a jedynie na to, czy po jego aktywacji system włączy ekran. Rzeczywisty gest, który ma zostać wykryty, nie jest określony i może zostać wybrany przez producenta urządzenia.
Ten czujnik musi zużywać mało energii, ponieważ prawdopodobnie będzie aktywny przez całą dobę.
Każde zdarzenie czujnika zgłasza 1 w sensors_event_t.data[0].
Gest podnoszenia
Czujniki fizyczne: nieokreślone (dowolne o niskim poborze mocy)
Tryb raportowania: One-shot
Niskie zużycie energii
Zaimplementuj tylko wersję tego czujnika, która wybudza urządzenie.
getDefaultSensor(SENSOR_TYPE_PICK_UP_GESTURE)
zwraca czujnik wybudzania
Czujnik gestów podnoszenia aktywuje się, gdy urządzenie zostanie podniesione, niezależnie od tego, gdzie było wcześniej (na biurku, w kieszeni lub torbie).
Każde zdarzenie czujnika zgłasza 1 w sensors_event_t.data[0].
Gest spojrzenia
Czujniki fizyczne: nieokreślone (dowolne o niskim poborze mocy)
Tryb raportowania: One-shot
Niskie zużycie energii
Zaimplementuj tylko wersję tego czujnika, która wybudza urządzenie.
getDefaultSensor(SENSOR_TYPE_GLANCE_GESTURE)
zwraca czujnik wybudzania
Czujnik gestów umożliwia krótkie włączenie ekranu, aby użytkownik mógł szybko sprawdzić wyświetlane na nim treści na podstawie określonego ruchu. Gdy ten czujnik zostanie aktywowany, urządzenie na chwilę włączy ekran, aby użytkownik mógł sprawdzić powiadomienia lub inne treści, gdy urządzenie jest zablokowane i nie można z nim wchodzić w interakcję (jest w stanie uśpienia). Następnie ekran ponownie się wyłączy. To zachowanie (krótkie włączenie ekranu po aktywacji czujnika) może zostać wyłączone przez użytkownika w ustawieniach urządzenia. Zmiany ustawień nie wpływają na działanie czujnika. Zmieniają tylko to, czy po jego aktywacji ekran na chwilę się włączy. Rzeczywisty gest, który ma zostać wykryty, nie jest określony i może zostać wybrany przez producenta urządzenia.
Ten czujnik musi zużywać mało energii, ponieważ prawdopodobnie będzie aktywny przez całą dobę.
Każde zdarzenie czujnika zgłasza 1 w sensors_event_t.data[0].
Czujniki IMU o ograniczonej liczbie osi
Dostępne od Androida 13 czujniki IMU o ograniczonej liczbie osi to czujniki, które obsługują przypadki użycia, w których nie są dostępne wszystkie 3 osie (x, y, z). Standardowe typy IMU w Androidzie (np.
SENSOR_TYPE_ACCELEROMETER i
SENSOR_TYPE_GYROSCOPE) zakładają, że obsługiwane są wszystkie 3 osie. Jednak nie wszystkie formaty i urządzenia obsługują 3-osiowe akcelerometry i 3-osiowe żyroskopy.
Akcelerometr z ograniczoną liczbą osi
Czujniki fizyczne: akcelerometr
Tryb raportowania: Ciągły
getDefaultSensor(SENSOR_TYPE_ACCELEROMETER_LIMITED_AXES)
zwraca czujnik, który nie wybudza urządzenia
Akcelerometr z ograniczonymi osiami jest odpowiednikiem TYPE_ACCELEROMETER, ale obsługuje przypadki, w których 1 lub 2 osie nie są obsługiwane.
Ostatnie 3 wartości zdarzenia czujnika zgłoszone przez czujnik wskazują, czy obsługiwane są wartości przyspieszenia dla osi x, y i z. Wartość 1.0 oznacza, że oś jest obsługiwana, a wartość 0 oznacza, że nie jest. Producenci urządzeń określają obsługiwane osie w czasie kompilacji, a wartości nie zmieniają się w czasie działania.
Producenci urządzeń muszą ustawić wartości przyspieszenia dla nieużywanych osi na 0 zamiast pozostawiać je niezdefiniowane.
Żyroskop z ograniczoną liczbą osi
Czujniki fizyczne: żyroskop
Tryb raportowania: Ciągły
getDefaultSensor(SENSOR_TYPE_GYROSCOPE_LIMITED_AXES)
zwraca czujnik, który nie wybudza urządzenia
Żyroskop z ograniczoną liczbą osi jest odpowiednikiem TYPE_GYROSCOPE, ale obsługuje przypadki, w których 1 lub 2 osie nie są obsługiwane.
Ostatnie 3 wartości zdarzenia czujnika zgłoszone przez czujnik określają, czy obsługiwana jest wartość prędkości kątowej dla osi x, y i z. Wartość 1.0 oznacza, że oś jest obsługiwana, a wartość 0 oznacza, że nie jest. Producenci urządzeń określają obsługiwane osie w czasie kompilacji, a wartości nie zmieniają się w czasie działania.
Producenci urządzeń muszą ustawić wartości prędkości kątowej dla nieużywanych osi na 0.
Akcelerometr – ograniczone osie bez kalibracji
Czujniki fizyczne: akcelerometr
Tryb raportowania: Ciągły
getDefaultSensor(SENSOR_TYPE_ACCELEROMETER_LIMITED_AXES_UNCALIBRATED)
zwraca czujnik, który nie wybudza urządzenia
Akcelerometr z ograniczonymi osiami (niekalibrowany) jest odpowiednikiem czujnika TYPE_ACCELEROMETER_UNCALIBRATED, ale obsługuje przypadki, w których 1 lub 2 osie nie są obsługiwane.
Ostatnie 3 wartości zdarzenia czujnika zgłoszone przez czujnik wskazują, czy wartości przyspieszenia i odchylenia dla osi x, y i z są obsługiwane. Wartość 1.0 oznacza, że oś jest obsługiwana, a wartość 0 oznacza, że nie jest obsługiwana. Producenci urządzeń określają obsługiwane osie w czasie kompilacji, a wartości nie zmieniają się w czasie działania.
Producenci urządzeń muszą ustawić wartości przyspieszenia i odchylenia dla nieużywanych osi na 0.
Żyroskop – ograniczone osie bez kalibracji
Czujniki fizyczne: żyroskop
Tryb raportowania: Ciągły
getDefaultSensor(SENSOR_TYPE_GYROSCOPE_LIMITED_AXES_UNCALIBRATED)
zwraca czujnik, który nie wybudza urządzenia
Nie skalibrowany czujnik żyroskopu o ograniczonej liczbie osi jest odpowiednikiem czujnika TYPE_GYROSCOPE_UNCALIBRATED, ale obsługuje przypadki, w których 1 lub 2 osie nie są obsługiwane.
Ostatnie 3 wartości zdarzenia czujnika zgłoszone przez czujnik wskazują, czy obsługiwane są wartości prędkości kątowej i dryfu dla osi x, y i z. Wartość 1.0 oznacza, że oś jest obsługiwana, a wartość 0 oznacza, że nie jest obsługiwana. Producenci urządzeń określają obsługiwane osie w czasie kompilacji, a wartości nie zmieniają się w czasie działania.
Producenci urządzeń muszą ustawić wartości prędkości kątowej i dryfu dla nieużywanych osi na 0.
Kompozytowy czujnik IMU z ograniczonymi osiami
Czujniki fizyczne: dowolna kombinacja 3-osiowego akcelerometru, 3-osiowego żyroskopu, 3-osiowego akcelerometru bez kalibracji i 3-osiowego żyroskopu bez kalibracji.
Tryb raportowania: Ciągły
Złożony czujnik IMU o ograniczonym zakresie osi jest odpowiednikiem czujnika IMU o ograniczonym zakresie osi, ale zamiast być obsługiwany w warstwie HAL, przekształca dane z czujnika 3-osiowego na odpowiednie warianty o ograniczonym zakresie osi. Te czujniki złożone są włączone tylko w przypadku urządzeń samochodowych.
W tabeli poniżej znajdziesz przykład konwersji ze standardowego 3-osiowego akcelerometru na złożony akcelerometr o ograniczonej liczbie osi.
| Wartości SensorEvent dla SENSOR_TYPE_ACCELEROMETER | Przykład zdarzenia SENSOR_TYPE_ACCELEROMETER SensorEvent | Złożone zdarzenie SENSOR_TYPE_ACCELEROMETER_LIMITED_AXES SensorEvent |
|---|---|---|
| values[0] | -0,065 |
-0,065 |
| values[1] | 0,078 |
0,078 |
| values[2] | 9808 |
9808 |
| wartości[3] | Nie dotyczy |
1,0 |
| values[4] | Nie dotyczy |
1,0 |
| wartości[5] | Nie dotyczy |
1,0 |
Czujniki samochodowe
Czujniki obsługujące zastosowania w motoryzacji.
Nagłówek
Podstawowe czujniki fizyczne: dowolna kombinacja GPS, magnetometru, akcelerometru i żyroskopu.
Tryb raportowania: Ciągły
getDefaultSensor(SENSOR_TYPE_HEADING)
zwraca czujnik, który nie wybudza urządzenia
Dostępny od Androida 13 czujnik kierunku mierzy w stopniach kierunek, w którym jest skierowane urządzenie, względem północy geograficznej. Czujnik kierunku zawiera 2 wartości SensorEvent.
Jeden dla zmierzonego kierunku urządzenia i jeden dla dokładności podanej wartości kierunku.
Wartości kierunku podawane przez ten czujnik muszą mieścić się w przedziale od 0.0 (włącznie) do 360.0 (wyłącznie), przy czym 0 oznacza północ, 90 – wschód, 180 – południe, a 270 – zachód.
Dokładność tego czujnika jest określana przy poziomie ufności 68%. W przypadku, gdy rozkład podstawowy jest rozkładem normalnym Gaussa, dokładność wynosi jedno odchylenie standardowe. Jeśli na przykład czujnik kierunku zwróci wartość kierunku 60 stopni i wartość dokładności 10 stopni, istnieje 68-procentowe prawdopodobieństwo, że rzeczywisty kierunek będzie mieścić się w przedziale od 50 do 70 stopni.