
ค่าคงที่และองค์ประกอบพื้นฐานของการสั่นได้รับการกำหนดโดย HAL ของเครื่องสั่นและแมปโดย เฟรมเวิร์ก Android กับ API สาธารณะ ทำการตรวจสอบต่อไปนี้เพื่อดูว่าอุปกรณ์ของคุณเป็นไปตามข้อกำหนดขั้นต่ำในการใช้การตอบสนองแบบสัมผัสหรือไม่
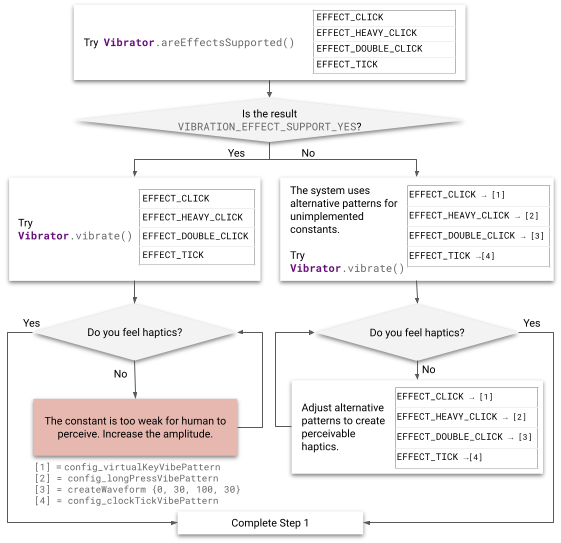
รูปที่ 2 การใช้เอฟเฟกต์
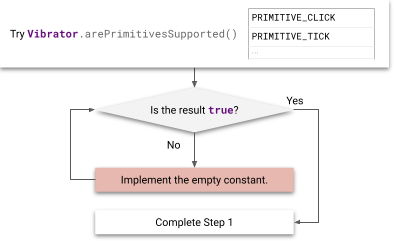
รูปที่ 3 การใช้งานองค์ประกอบพื้นฐาน
ใช้ค่าคงที่
นักพัฒนาแอปใช้ค่าคงที่แบบสัมผัสใน VibrationEffect ได้ผ่าน VibrationEffect.createPredefined() ตรวจสอบสถานะการใช้งานค่าคงที่แบบสัมผัสต่อไปนี้
| ค่าคงที่ของการโต้ตอบการสัมผัส | สถานที่ตั้งและข้อมูลสรุป |
|---|---|
EFFECT_TICK, EFFECT_CLICK,
EFFECT_HEAVY_CLICK,
EFFECT_DOUBLE_CLICK |
VibrationEffect
classค่าคงที่การสั่นใน VibrationEffect ไม่มีแนวคิดเกี่ยวกับ
เหตุการณ์อินพุต และไม่มีองค์ประกอบ UI ค่าคงที่รวมถึงแนวคิดเกี่ยวกับระดับพลังงานแทน เช่น EFFECT_CLICK และ
EFFECT_HEAVY_CLICK ซึ่งเรียกใช้โดย
createPredefined() |
การสั่นสำรองที่อธิบายต่อไปนี้จะดำเนินการในอุปกรณ์ที่ไม่ได้
ใช้ค่าคงที่ VibrationEffect เราขอแนะนำให้อัปเดตการกำหนดค่าเหล่านี้เพื่อให้ทำงานได้ดีที่สุดในอุปกรณ์ดังกล่าว
EFFECT_CLICKการสั่นของรูปคลื่นที่สร้างด้วย
VibrationEffect.createWaveformและการกำหนดเวลาที่กำหนดค่าไว้ที่frameworks/base/core/res/res/values/config.xml##config_virtualKeyVibePatternEFFECT_HEAVY_CLICKการสั่นของรูปคลื่นที่สร้างด้วย
VibrationEffect.createWaveformและการกำหนดเวลาที่กำหนดค่าไว้ที่frameworks/base/core/res/res/values/config.xml##config_longPressVibePatternEFFECT_DOUBLE_CLICK
การสั่นแบบรูปคลื่นที่สร้างด้วย
VibrationEffect.createWaveformและเวลา (0, 30, 100, 30)EFFECT_TICKการสั่นของรูปคลื่นที่สร้างด้วย
VibrationEffect.createWaveformและการกำหนดเวลาที่กำหนดค่าไว้ที่frameworks/base/core/res/res/values/config.xml##config_clockTickVibePattern
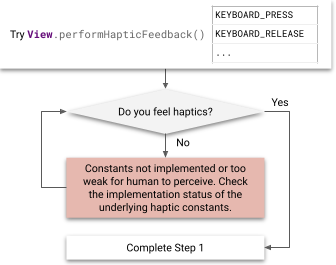
รูปที่ 4 การใช้ค่าคงที่ของความคิดเห็น
นักพัฒนาแอปใช้ค่าคงที่แบบสัมผัสใน HapticFeedbackConstants ได้ผ่าน View.performHapticFeedback() ตรวจสอบสถานะของค่าคงที่แบบสัมผัสสาธารณะต่อไปนี้
| ค่าคงที่ของการโต้ตอบการสัมผัส | สถานที่ตั้งและข้อมูลสรุป |
|---|---|
CLOCK_TICK, CONTEXT_CLICK, KEYBOARD_PRESS,
KEYBOARD_RELEASE, KEYBOARD_TAP, LONG_PRESS,
TEXT_HANDLE_MOVE, VIRTUAL_KEY,
VIRTUAL_KEY_RELEASE, CONFIRM, REJECT,
GESTURE_START, GESTURE_END |
HapticFeedbackConstants classค่าคงที่การสั่นใน HapticFeedbackConstants เหตุการณ์อินพุตความช่วยเหลือ
ที่มีองค์ประกอบ UI บางอย่าง เช่น KEYBOARD_PRESS และ
KEYBOARD_RELEASE ซึ่งเรียกใช้โดย
performHapticFeedback() |
ใช้ฟังก์ชันพื้นฐาน
องค์ประกอบพื้นฐานแบบสัมผัสใน
VibrationEffect.Composition
มีความเข้มที่ปรับขนาดได้ซึ่งนักพัฒนาแอปใช้ได้ผ่าน
addPrimitive(int primitiveId, float scale, int delay)
โดยสามารถแบ่งองค์ประกอบพื้นฐานออกเป็น 2 หมวดหมู่ ได้แก่
Primitive แบบสั้น: Primitive ที่มีระยะเวลาสั้น โดยปกติจะน้อยกว่า 20 มิลลิวินาที ได้แก่
CLICK,TICKและLOW_TICKองค์ประกอบพื้นฐานของเสียงเจื้อยแจ้ว: องค์ประกอบพื้นฐานที่มีแอมพลิจูดและความถี่แตกต่างกัน มักมีระยะเวลานานกว่าองค์ประกอบพื้นฐานแบบสั้น ซึ่งได้แก่
SLOW_RISEQUICK_RISE,QUCK_FALL,THUDและSPIN
Shorts ดั้งเดิม
โดยสามารถอธิบายรูปแบบการเร่งความเร็วเอาต์พุตของมอเตอร์สั่นสำหรับรูปแบบการสั่นแบบสั้นได้ ความถี่สัมบูรณ์ที่ใช้จะแตกต่างกันไปสำหรับแต่ละองค์ประกอบพื้นฐาน โดยขึ้นอยู่กับความถี่เรโซแนนซ์ของแอคทูเอเตอร์ ดูข้อมูลเพิ่มเติมเกี่ยวกับการตั้งค่าฮาร์ดแวร์และเครื่องมือสำหรับวัดเอาต์พุตได้ที่ ตั้งค่าอุปกรณ์ทดสอบ
เมตริกคุณภาพที่มีประโยชน์สำหรับการสั่นแบบสั้นคืออัตราส่วนพัลส์ต่อเสียงเรียก (PRR) ซึ่งแสดงในรูปที่ 5 PRR คืออัตราส่วนระหว่างพัลส์หลัก ซึ่งกำหนดโดยสัญญาณภายในหน้าต่างระยะเวลาที่แอมพลิจูดลดลง เหลือ 10% ของแอมพลิจูดสูงสุด กับพัลส์วงแหวนซึ่งกำหนดโดยสัญญาณที่ แอมพลิจูดลดลงจาก 10% ของแอมพลิจูดสูงสุดเหลือน้อยกว่า 1% ของแอมพลิจูดสูงสุด สูตรสำหรับ PRR คือ
ดูข้อมูลเพิ่มเติมเกี่ยวกับ PRR ได้ที่ วิเคราะห์รูปคลื่น และดูข้อมูลเพิ่มเติมเกี่ยวกับการวิเคราะห์และเปรียบเทียบผลลัพธ์ได้ที่ เปรียบเทียบผลลัพธ์โดยใช้แผนที่ประสิทธิภาพ
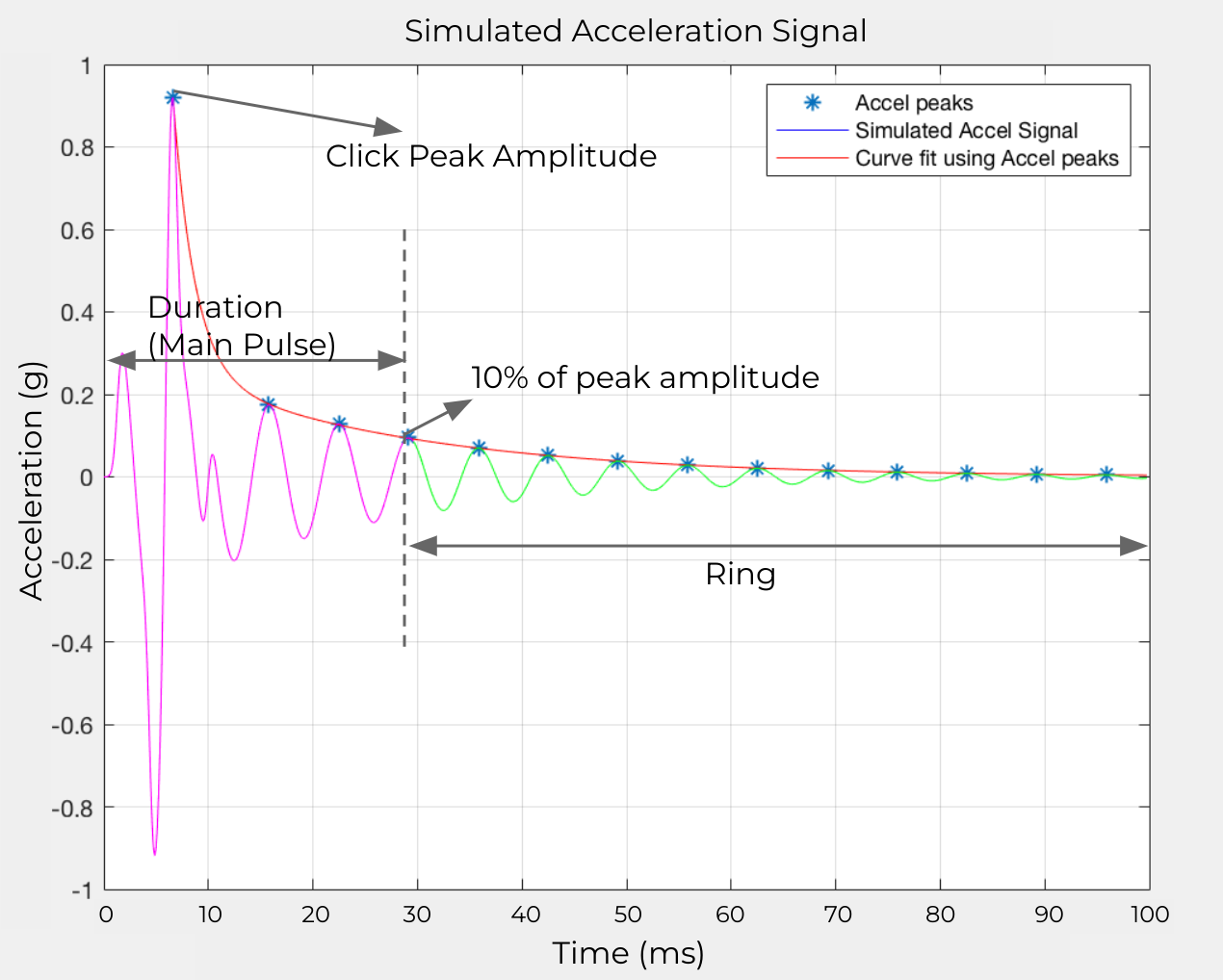
รูปที่ 5 คำจำกัดความของอัตราส่วนการกดต่อการโทร
ใช้ไพรมิทีฟแบบสั้นเป็นความคิดเห็นที่ผู้ใช้ป้อนหรือเล่นในองค์ประกอบที่ยาวขึ้น เพื่อสร้างพื้นผิวที่นุ่มนวล ซึ่งหมายความว่าโฆษณาเหล่านี้มักจะแสดง บ่อยครั้งและเล่นต่อกันอย่างรวดเร็ว ความเข้มที่รับรู้ได้ของ รูปทรงเรขาคณิตแบบสั้นๆ เดี่ยวๆ สามารถเพิ่มความเข้มของเอฟเฟกต์ที่ใหญ่ขึ้นได้ ด้วยเหตุนี้ ให้ปรับเทียบเครื่องหมายเดียวหรือเครื่องหมายต่ำด้วย องค์ประกอบที่ใหญ่ขึ้น เช่น เครื่องหมาย 100 รายการติดต่อกัน
คลิกดั้งเดิม
คลิกแบบดั้งเดิมเป็นเอฟเฟกต์ที่คมชัดและทรงพลัง ซึ่งมักทำงานใกล้กับ ความถี่เรโซแนนซ์ของอุปกรณ์เพื่อให้ได้เอาต์พุตสูงสุดในระยะเวลาอันสั้น โดยจะมีความเข้มข้นและลึกกว่ารูปทรงเรขาคณิตอื่นๆ และทำงานที่ความเข้มสูงสุด
หากเป็นไปได้ ให้ใช้การโอเวอร์ไดรฟ์มอเตอร์ที่จุดเริ่มต้นและการเบรกแบบแอ็กทีฟที่จุดสิ้นสุด เพื่อให้มอเตอร์มีเวลาเพิ่มขึ้นและลดลงในระยะสั้น สำหรับมอเตอร์บางรุ่น การใช้คลื่นสี่เหลี่ยมแทนคลื่นไซน์จะช่วยให้เร่งความเร็วได้เร็วขึ้น รูปที่ 6 แสดง ตัวอย่างโปรไฟล์การเร่งความเร็วเอาต์พุตสำหรับ Primitive ของการคลิก
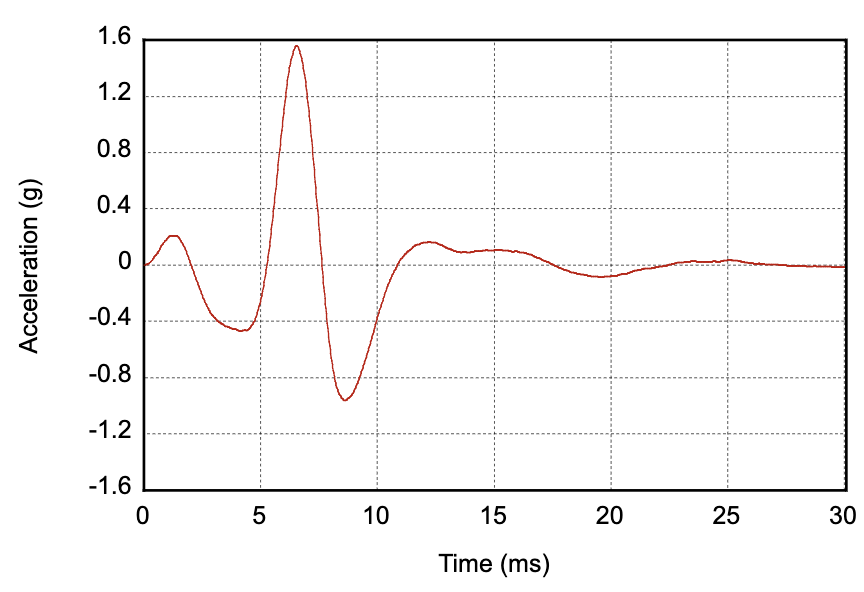
รูปที่ 6 ตัวอย่างโปรไฟล์การเร่งความเร็วเอาต์พุตสำหรับ Primitive ของการคลิก
| พารามิเตอร์ | คำแนะนำ |
|---|---|
| ระยะเวลา |
เป้าหมาย: 12 มิลลิวินาที ขีดจำกัด: น้อยกว่า 30 มิลลิวินาที |
| การเร่งความเร็วเอาต์พุตสูงสุด |
เป้าหมาย: 2 G ขีดจำกัด: มากกว่า 1 GB |
| ความถี่ | ที่ความถี่เรโซแนนซ์โดยประมาณ |
เครื่องหมายขีดถูกเบื้องต้น (เครื่องหมายขีดถูกแบบบาง)
Primitive ของการคลิกเป็นเอฟเฟกต์ที่คมชัดและสั้น ซึ่งมักจะทำงานในช่วงความถี่ที่สูงกว่า นอกจากนี้ยังอธิบายลักษณะดั้งเดิมนี้ได้ว่าเป็นการคลิกที่มีความเข้มปานกลาง ที่ความถี่สูงขึ้นโดยมีส่วนท้ายสั้น คำแนะนำเดียวกันนี้ใช้ได้กับการ บรรลุเวลาที่เพิ่มขึ้นสั้นๆ โดยใช้การโอเวอร์ไดรฟ์มอเตอร์หรือคลื่นสี่เหลี่ยมสำหรับ การเริ่มต้น และการเบรกที่ใช้งานอยู่เมื่อออฟเซ็ต รูปที่ 7 แสดงตัวอย่างเอาต์พุต โปรไฟล์การเร่งความเร็วสำหรับองค์ประกอบดั้งเดิมของเครื่องหมายถูก
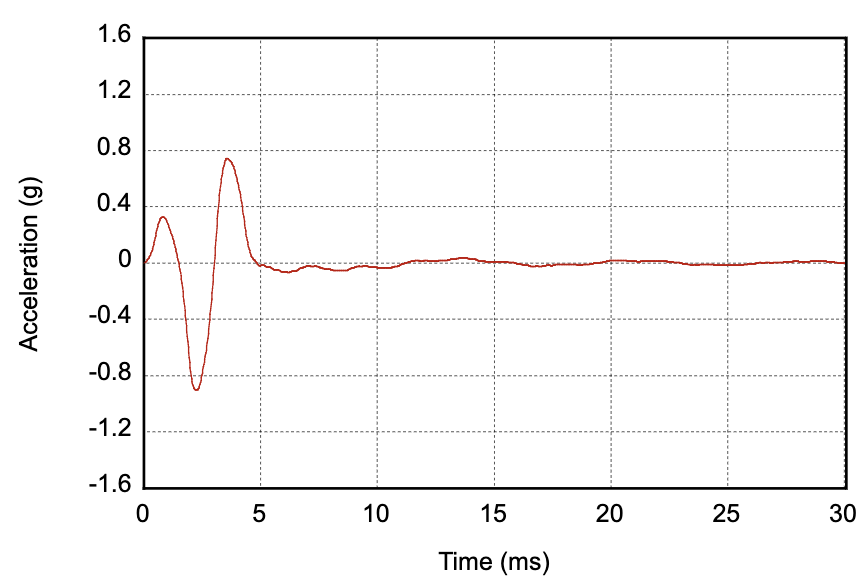
รูปที่ 7 ตัวอย่างโปรไฟล์การเร่งความเร็วเอาต์พุตสำหรับองค์ประกอบย่อยของเครื่องหมายถูก
| พารามิเตอร์ | คำแนะนำ |
|---|---|
| ระยะเวลา |
เป้าหมาย: 5 มิลลิวินาที ขีดจำกัด: น้อยกว่า 20 มิลลิวินาที |
| การเร่งความเร็วเอาต์พุตสูงสุด |
เป้าหมาย: ครึ่งหนึ่งของ ขีดจำกัด: ระหว่าง 0.5 G ถึง 1 G |
| ความถี่ |
เป้าหมาย: 2 เท่าของความถี่เรโซแนนซ์ ขีดจำกัด: < 500 Hz |
Primitive ที่มีช่วงเวลาต่ำ
Primitive แบบ "tick ต่ำ" เป็นเวอร์ชันที่เบากว่าและอ่อนกว่าของ "tick เบา" โดยทำงานที่ ช่วงความถี่ที่ต่ำกว่าเพื่อให้เอฟเฟกต์มีน้ำหนักมากขึ้น องค์ประกอบพื้นฐานนี้ยังอธิบายได้อีกว่าเป็นการคลิกที่มีความเข้มปานกลางที่ความถี่ต่ำกว่า ซึ่งมีไว้เพื่อใช้ซ้ำๆ สำหรับความคิดเห็นแบบไดนามิก คำแนะนำเดียวกันนี้ใช้ได้กับการ บรรลุเวลาที่เพิ่มขึ้นอย่างรวดเร็วโดยใช้การโอเวอร์ไดรฟ์ของมอเตอร์หรือคลื่นสี่เหลี่ยมสำหรับ การเริ่มต้น รูปที่ 8 แสดงตัวอย่างโปรไฟล์การเร่งความเร็วเอาต์พุตสำหรับไพรมิตีฟที่มีการ ทำเครื่องหมายต่ำ
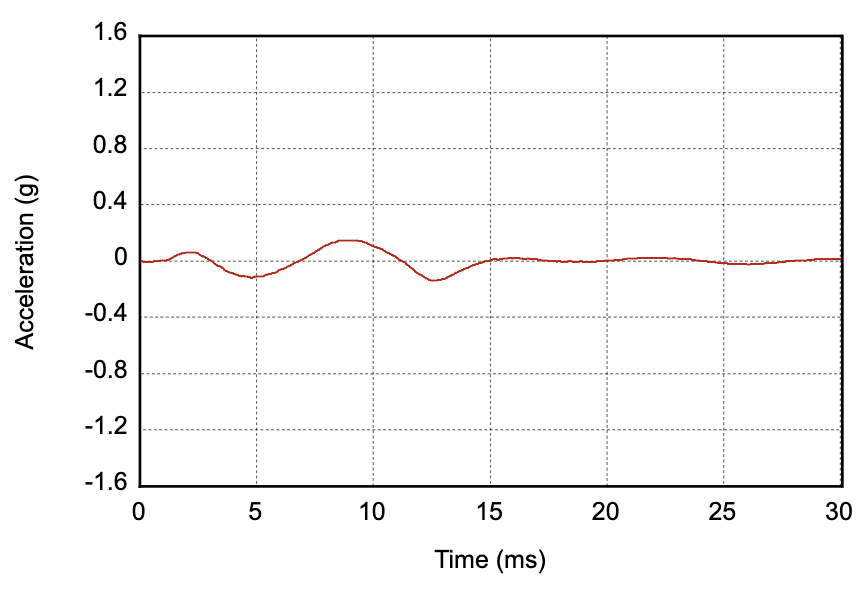
รูปที่ 8 ตัวอย่างโปรไฟล์การเร่งเอาต์พุตสำหรับองค์ประกอบพื้นฐานที่มีการส่งสัญญาณต่ำ
| พารามิเตอร์ | คำแนะนำ |
|---|---|
| ระยะเวลา |
เป้าหมาย: 12 มิลลิวินาที ขีดจำกัด: น้อยกว่า 30 มิลลิวินาที |
| การเร่งความเร็วเอาต์พุตสูงสุด |
เป้าหมาย: 1/4 ของ ขีดจำกัด: ระหว่าง 0.2 G ถึง 0.5 G |
| ความถี่ |
เป้าหมาย: ความถี่เรโซแนนซ์ 2/3 ขีดจำกัด: < 100 Hz |
องค์ประกอบพื้นฐานของ Chirp
โดยสามารถอธิบายองค์ประกอบพื้นฐานของ Chirp ได้ด้วยสัญญาณอินพุตสำหรับระดับแรงดันไฟฟ้าและ ความถี่การสั่น อัตราเร่งที่มอเตอร์สามารถส่งออกได้ที่ ช่วงความถี่ต่างๆ จะแตกต่างกันไปตามเส้นโค้งการตอบสนองความถี่ ของแอคทูเอเตอร์ คุณต้องปรับช่วงความถี่และระดับแรงดันไฟฟ้าในแต่ละอุปกรณ์
องค์ประกอบการเพิ่มขึ้นอย่างช้าๆ
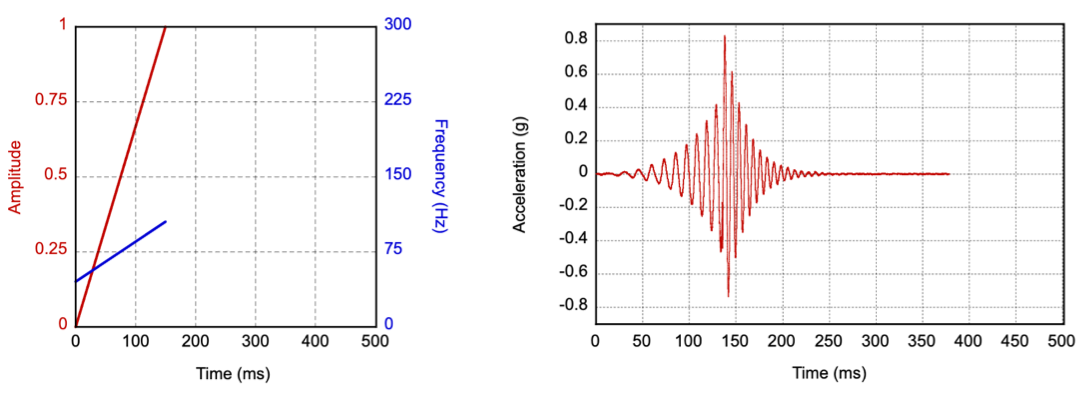
การเพิ่มขึ้นอย่างช้าๆ คือการกวาดแอมพลิจูดและความถี่ขึ้นอย่างช้าๆ โดยมีการเริ่มต้นที่นุ่มนวล และเพิ่มความเข้มของการสั่นอย่างสม่ำเสมอตลอดการกวาด โดยสามารถ ใช้การกวาดทั้งแอมพลิจูดและความถี่อย่างสม่ำเสมอ โดยใช้ ช่วงความถี่ที่ต่ำกว่าซึ่งทำงานนอกเรโซแนนซ์ รูปที่ 9 แสดงพารามิเตอร์อินพุต และตัวอย่างโปรไฟล์การเร่งความเร็วเอาต์พุตสำหรับการติดตั้งใช้งานนี้ (เส้นสีแดงตรงกับป้ายกำกับแอมพลิจูดทางด้านซ้าย และแสดงให้เห็นว่าแอมพลิจูดการสั่นเปลี่ยนแปลงตามเวลาอย่างไร เส้นสีน้ำเงินตรงกับป้ายกำกับความถี่ ทางด้านขวา และแสดงให้เห็นว่าความถี่การสั่นเปลี่ยนแปลงไปตามเวลาอย่างไร)
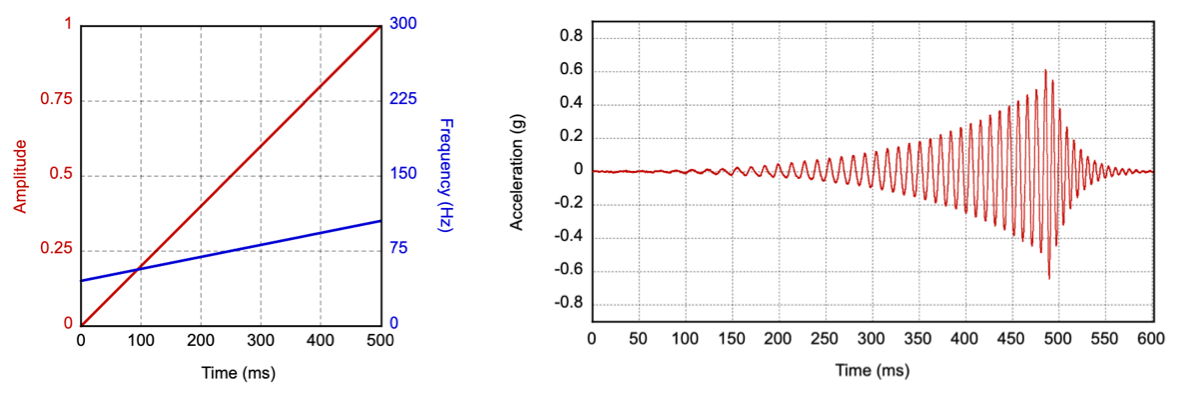
รูปที่ 9 พารามิเตอร์อินพุตและตัวอย่างโปรไฟล์การเร่งความเร็วเอาต์พุตสำหรับ องค์ประกอบพื้นฐานที่เพิ่มขึ้นอย่างช้าๆ
หากการตอบสนองความถี่ของมอเตอร์ถูกจำกัด (ไม่แรงพอ นอกความถี่เรโซแนนซ์) การใช้งานทางเลือกคือการกวาดไซน์ จาก 1/2x ถึง 1x ของความถี่เรโซแนนซ์ การสั่นพ้องของมอเตอร์ช่วย ให้สัญญาณถึงจุดสูงสุดที่ปลายทาง
| พารามิเตอร์ | คำแนะนำ |
|---|---|
| ระยะเวลา |
เป้าหมาย: 500 มิลลิวินาที ความคลาดเคลื่อน: 20 มิลลิวินาที |
| การเร่งความเร็วเอาต์พุตสูงสุด |
เป้าหมาย: 0.5 G ขีดจำกัด: ระหว่าง 0.5 G ถึง 1 G |
| ความถี่ |
เป้าหมาย: 1/2 ถึง 2/3 ของความถี่เรโซแนนซ์ ทางเลือก: 1/2 ถึงความถี่เรโซแนนซ์ |
องค์ประกอบพื้นฐานของการเพิ่มขึ้นอย่างรวดเร็ว
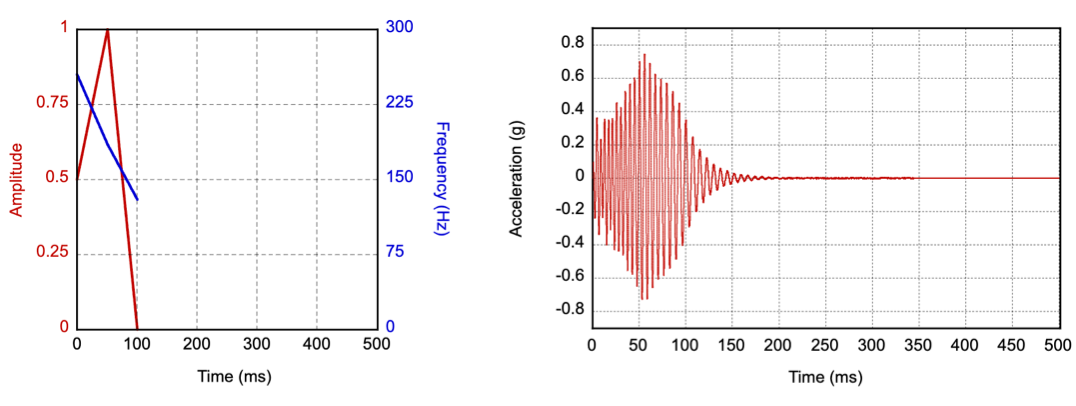
การเพิ่มขึ้นอย่างรวดเร็วคือการกวาดแอมพลิจูดและความถี่ที่เร็วขึ้นโดยเพิ่มขึ้นอย่างนุ่มนวล และเพิ่มความแรงของการสั่นอย่างต่อเนื่องตลอดการกวาด เป้าหมายความถี่ของการเร่งความเร็วและการสั่นสะเทือนควรเหมือนกับองค์ประกอบพื้นฐานของการเพิ่มขึ้นอย่างช้าๆ ซึ่งทำได้ในระยะเวลาที่สั้นลง รูปที่ 10 แสดงพารามิเตอร์อินพุตการสั่น และตัวอย่างโปรไฟล์ความเร่งเอาต์พุตสำหรับไพรมิทีฟการเพิ่มขึ้นอย่างช้าๆ (เส้นสีแดงตรงกับป้ายกำกับแอมพลิจูดทางด้านซ้าย และแสดงให้เห็นว่าแอมพลิจูดการสั่นเปลี่ยนแปลงตามเวลาอย่างไร เส้นสีน้ำเงินตรงกับป้ายกำกับความถี่ ทางด้านขวา และแสดงให้เห็นว่าความถี่การสั่นเปลี่ยนแปลงไปตามเวลาอย่างไร)
รูปที่ 10 พารามิเตอร์อินพุตและตัวอย่างโปรไฟล์การเร่งความเร็วเอาต์พุตสำหรับ องค์ประกอบด่วน
| พารามิเตอร์ | คำแนะนำ |
|---|---|
| ระยะเวลา |
เป้าหมาย: 150 มิลลิวินาที ความคลาดเคลื่อน: 20 มิลลิวินาที |
| การเร่งความเร็วเอาต์พุตสูงสุด |
เป้าหมาย: เหมือนกับ ขีดจำกัด: เหมือนกับ |
| ความถี่ |
เป้าหมาย: เหมือนกับ อีกทางเลือก: ราคาเท่ากันกับ |
องค์ประกอบการตกอย่างรวดเร็ว
การตกอย่างรวดเร็วคือการกวาดลงของแอมพลิจูดและความถี่อย่างรวดเร็วโดยมีจุดเริ่มต้นที่นุ่มนวล คุณสามารถใช้ความถี่ที่สูงขึ้นเป็นจุดเริ่มต้นขณะที่มอเตอร์ เพิ่มความเร็วเพื่อไปถึงการเร่งความเร็วเอาต์พุตสูงสุด ความถี่ควรลดลงอย่างต่อเนื่องตลอดการกวาด แม้ในช่วงเวลาที่เพิ่มขึ้น รูปที่ 11 แสดงพารามิเตอร์อินพุตและตัวอย่างโปรไฟล์การเร่งความเร็วเอาต์พุตสำหรับการ ติดตั้งใช้งานนี้ (เส้นสีแดงตรงกับป้ายกำกับแอมพลิจูดทางด้านซ้าย และแสดงให้เห็นว่าแอมพลิจูดการสั่นเปลี่ยนแปลงตามเวลาอย่างไร เส้นสีน้ำเงินตรงกับป้ายกำกับความถี่ ทางด้านขวา และแสดงให้เห็นว่าความถี่การสั่นเปลี่ยนแปลงไปตามเวลาอย่างไร)
รูปที่ 11 พารามิเตอร์อินพุตและตัวอย่างโปรไฟล์การเร่งความเร็วเอาต์พุตสำหรับ องค์ประกอบด่วน
| พารามิเตอร์ | คำแนะนำ |
|---|---|
| ระยะเวลา |
เป้าหมาย: 100 มิลลิวินาที ความคลาดเคลื่อน: 20 มิลลิวินาที |
| การเร่งความเร็วเอาต์พุตสูงสุด |
เป้าหมาย: 1 G ขีดจำกัด: ระหว่าง 0.5 G ถึง 2 G |
| ความถี่ |
เป้าหมาย: 2 เท่าถึง 1 เท่าของความถี่เรโซแนนซ์ |
Thud primitive
เสียงก้องเป็นเอฟเฟกต์เสียงกระทบต่ำที่จำลองความรู้สึกทางกายภาพของการเคาะไม้กลวง Primitive นี้ทำงานในย่านความถี่ต่ำ คล้ายกับ Primitive แบบ Tick ต่ำ เพื่อให้เอฟเฟกต์มีเนื้อหามากขึ้น คุณสามารถใช้ Primitive ของเสียงทุ้มเป็นกวาดลงของแอมพลิจูดและความถี่ที่ช่วงความถี่ต่ำ (ควรต่ำกว่า 100 Hz) รูปที่ 12 แสดงพารามิเตอร์อินพุตและตัวอย่างโปรไฟล์การเร่งความเร็วเอาต์พุตสำหรับการติดตั้งใช้งานนี้ (เส้นสีแดงตรงกับป้ายกำกับแอมพลิจูดทางด้านซ้าย และแสดงให้เห็นว่าแอมพลิจูดการสั่นเปลี่ยนแปลงตามเวลาอย่างไร เส้นสีน้ำเงินตรงกับป้ายกำกับความถี่ ทางด้านขวา และแสดงให้เห็นว่าความถี่การสั่นเปลี่ยนแปลงไปตามเวลาอย่างไร)
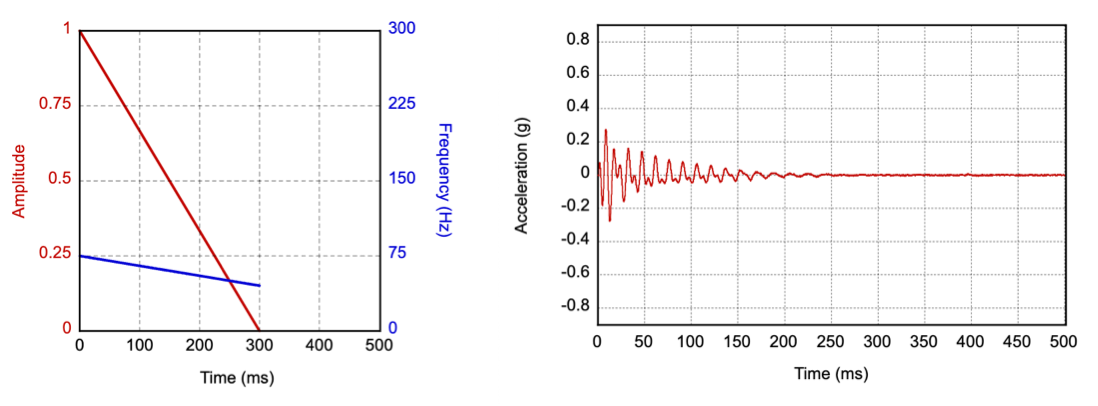
รูปที่ 12 พารามิเตอร์อินพุตและตัวอย่างโปรไฟล์การเร่งความเร็วเอาต์พุตสำหรับ ดั้งเดิม
หากการตอบสนองความถี่ของมอเตอร์ถูกจำกัด การใช้งานทางเลือก คือการเริ่มต้นด้วยสัญญาณไดรฟ์ที่มีความเข้มเต็มที่ที่ความถี่เรโซแนนซ์ และลดลงไปที่ความถี่ต่ำสุดที่เป็นไปได้ซึ่งยังคงรับรู้ได้ วิธีนี้อาจต้องเพิ่มความเข้มของสัญญาณไดรฟ์ที่ ความถี่ต่ำเพื่อให้รู้สึกถึงการสั่น
| พารามิเตอร์ | คำแนะนำ |
|---|---|
| ระยะเวลา |
เป้าหมาย: 300 มิลลิวินาที ความคลาดเคลื่อน: 20 มิลลิวินาที |
| การเร่งความเร็วเอาต์พุตสูงสุด |
เป้าหมาย: 0.25 G ขีดจำกัด: ระหว่าง 0.2 G ถึง 0.5 G |
| ความถี่ |
เป้าหมาย: 1/2 ถึง 1/3 ของความถี่เรโซแนนซ์ ทางเลือก: 1x ถึง 1/2 ของความถี่เรโซแนนซ์ |
องค์ประกอบพื้นฐานของการหมุน
การหมุนจะจำลองโมเมนตัมการหมุนของการหมุนขึ้นและลงอย่างรวดเร็วโดยมี การเน้นเล็กน้อยที่ตรงกลาง การหมุนสามารถทำได้โดยการกวาดแอมพลิจูดและความถี่แยกกัน ในทิศทางตรงกันข้าม และตามด้วยการเคลื่อนไหวแบบย้อนกลับ คุณควรใช้ช่วงความถี่ที่ต่ำกว่า (ควรต่ำกว่า 100 Hz) รูปที่ 13 แสดงพารามิเตอร์อินพุตและตัวอย่างเอาต์พุต โปรไฟล์การเร่งความเร็วสำหรับการติดตั้งใช้งานนี้ (เส้นสีแดงตรงกับป้ายกำกับแอมพลิจูดทางด้านซ้าย และแสดงให้เห็นว่าแอมพลิจูดการสั่นเปลี่ยนแปลงตามเวลาอย่างไร เส้นสีน้ำเงินตรงกับป้ายกำกับความถี่ ทางด้านขวา และแสดงให้เห็นว่าความถี่การสั่นเปลี่ยนแปลงไปตามเวลาอย่างไร)
เราขอแนะนำให้เรียกใช้ Spin Primitive 2 ครั้งติดต่อกัน หรือ 3 ครั้งในคอมโพสิต เพื่อให้เกิดความรู้สึกหมุนและไม่มั่นคง
หากการตอบสนองความถี่ของมอเตอร์มีข้อจำกัด การใช้งานทางเลือกคือการกวาดคลื่นไซน์อย่างรวดเร็วจาก 1/2x ถึง 1x ของความถี่เรโซแนนซ์แล้วกลับ การสั่นพ้องของมอเตอร์จะเน้น สัญญาณตรงกลางโดยอัตโนมัติ
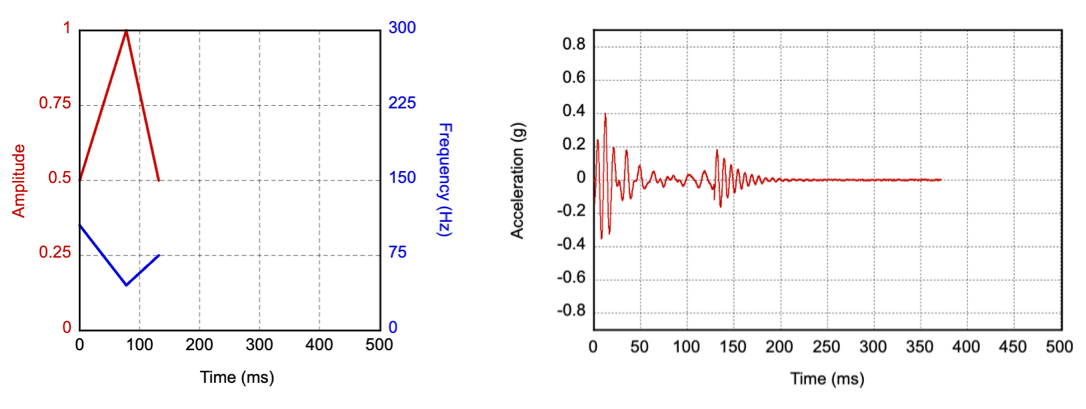
รูปที่ 13 พารามิเตอร์อินพุตและตัวอย่างโปรไฟล์การเร่งความเร็วเอาต์พุตสำหรับ องค์ประกอบพื้นฐานของฟังก์ชันหมุน
| พารามิเตอร์ | คำแนะนำ |
|---|---|
| ระยะเวลา |
เป้าหมาย: 150 มิลลิวินาที ความคลาดเคลื่อน: 20 มิลลิวินาที |
| การเร่งความเร็วเอาต์พุตสูงสุด |
เป้าหมาย: 0.5 G ขีดจำกัด: ระหว่าง 0.25 G ถึง 0.75 G |
| ความถี่ |
เป้าหมาย: 2/3 ถึง 1/3 จากนั้นกลับไปที่ 1/2 ของความถี่เรโซแนนซ์ ทางเลือก: 2/3 ถึง 1 เท่า แล้วกลับไปที่ 1/2 ของความถี่เรโซแนนซ์ |