
Konstanta dan primitif haptik ditentukan oleh HAL vibrator dan dipetakan oleh framework Android ke API publik. Lakukan pemeriksaan ini untuk menentukan apakah perangkat Anda memenuhi persyaratan minimum untuk menerapkan haptik:
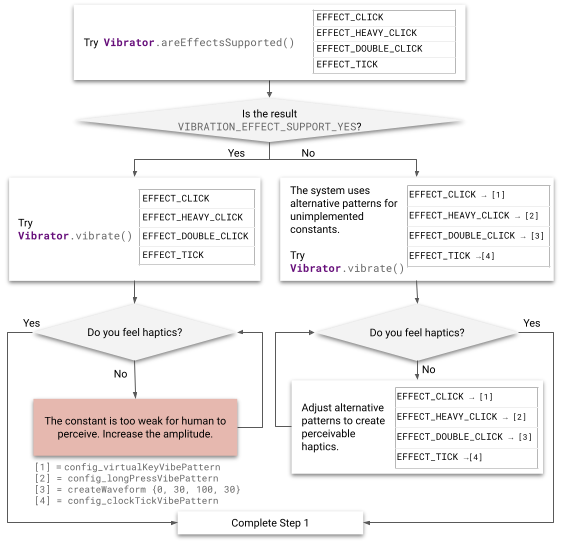
Gambar 2. Menerapkan efek
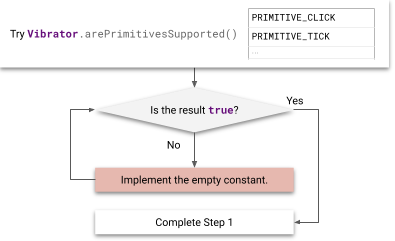
Gambar 3. Menerapkan primitif
Menerapkan konstanta
Konstanta haptik di VibrationEffect dapat digunakan oleh developer melalui VibrationEffect.createPredefined(). Periksa status penerapan konstanta haptik berikut.
| Konstanta haptik | Lokasi dan ringkasan |
|---|---|
EFFECT_TICK, EFFECT_CLICK,
EFFECT_HEAVY_CLICK,
EFFECT_DOUBLE_CLICK |
VibrationEffect
ClassKonstanta haptik di VibrationEffect tidak menyertakan konsep peristiwa input apa pun, dan tidak memiliki elemen UI. Konstanta mencakup konsep tingkat energi, seperti EFFECT_CLICK dan
EFFECT_HEAVY_CLICK, yang dipanggil oleh
createPredefined(). |
Getaran alternatif yang dijelaskan berikutnya dilakukan pada perangkat yang tidak menerapkan konstanta VibrationEffect. Sebaiknya perbarui konfigurasi ini agar dapat berfungsi dengan baik di perangkat tersebut.
EFFECT_CLICKGetaran bentuk gelombang yang dibuat dengan
VibrationEffect.createWaveformdan waktu yang dikonfigurasi diframeworks/base/core/res/res/values/config.xml##config_virtualKeyVibePattern.EFFECT_HEAVY_CLICKGetaran bentuk gelombang yang dibuat dengan
VibrationEffect.createWaveformdan waktu yang dikonfigurasi diframeworks/base/core/res/res/values/config.xml##config_longPressVibePattern.EFFECT_DOUBLE_CLICK
Getaran bentuk gelombang yang dibuat dengan
VibrationEffect.createWaveformdan waktu (0, 30, 100, 30).EFFECT_TICKGetaran bentuk gelombang yang dibuat dengan
VibrationEffect.createWaveformdan waktu yang dikonfigurasi diframeworks/base/core/res/res/values/config.xml##config_clockTickVibePattern.
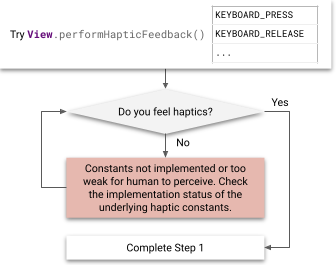
Gambar 4. Menerapkan konstanta respons
Konstanta haptik di HapticFeedbackConstants dapat digunakan oleh developer melalui View.performHapticFeedback()). Periksa status konstanta respons publik berikut.
| Konstanta haptik | Lokasi dan ringkasan |
|---|---|
CLOCK_TICK, CONTEXT_CLICK, KEYBOARD_PRESS,
KEYBOARD_RELEASE, KEYBOARD_TAP, LONG_PRESS,
TEXT_HANDLE_MOVE, VIRTUAL_KEY,
VIRTUAL_KEY_RELEASE, CONFIRM, REJECT,
GESTURE_START, GESTURE_END |
HapticFeedbackConstants classKonstanta haptik di HapticFeedbackConstants membantu peristiwa input
dengan elemen UI tertentu, seperti KEYBOARD_PRESS dan
KEYBOARD_RELEASE, yang dipanggil oleh
performHapticFeedback(). |
Menerapkan primitif
Primitif haptik di
VibrationEffect.Composition
memiliki intensitas yang dapat diskalakan yang dapat digunakan developer melalui
addPrimitive(int primitiveId, float scale, int delay).
Primitif dapat dibagi menjadi dua kategori:
Primitif pendek: Primitif dengan durasi singkat, biasanya kurang dari 20 md. Primitif ini adalah
CLICK,TICK, danLOW_TICK.Primitif Chirp: Primitif dengan amplitudo dan frekuensi yang bervariasi, biasanya dengan durasi yang lebih lama daripada primitif pendek. Primitif ini adalah
SLOW_RISE,QUICK_RISE,QUCK_FALL,THUD, danSPIN.
Primitif pendek
Primitif pendek dapat dijelaskan oleh profil akselerasi output motor vibrator. Frekuensi absolut yang digunakan bervariasi untuk setiap primitif, bergantung pada frekuensi resonansi aktuator. Lihat Menyiapkan peralatan pengujian untuk mengetahui informasi selengkapnya tentang penyiapan hardware dan alat untuk mengukur output.
Metrik kualitas yang berharga untuk getaran pendek adalah rasio pulsa ke dering (PRR), yang ditunjukkan pada Gambar 5. PRR didefinisikan sebagai rasio antara pulsa utama, yang ditentukan oleh sinyal di dalam jendela durasi tempat amplitudo menurun hingga 10% dari amplitudo puncak, dan pulsa dering, yang ditentukan oleh sinyal tempat amplitudo menurun dari 10% amplitudo puncak menjadi kurang dari 1% amplitudo puncak. Rumus untuk PRR adalah:
Untuk mengetahui informasi selengkapnya tentang PRR, lihat Menganalisis bentuk gelombang dan untuk mengetahui informasi selengkapnya tentang menganalisis dan membandingkan hasil, lihat Membandingkan hasil menggunakan peta performa.
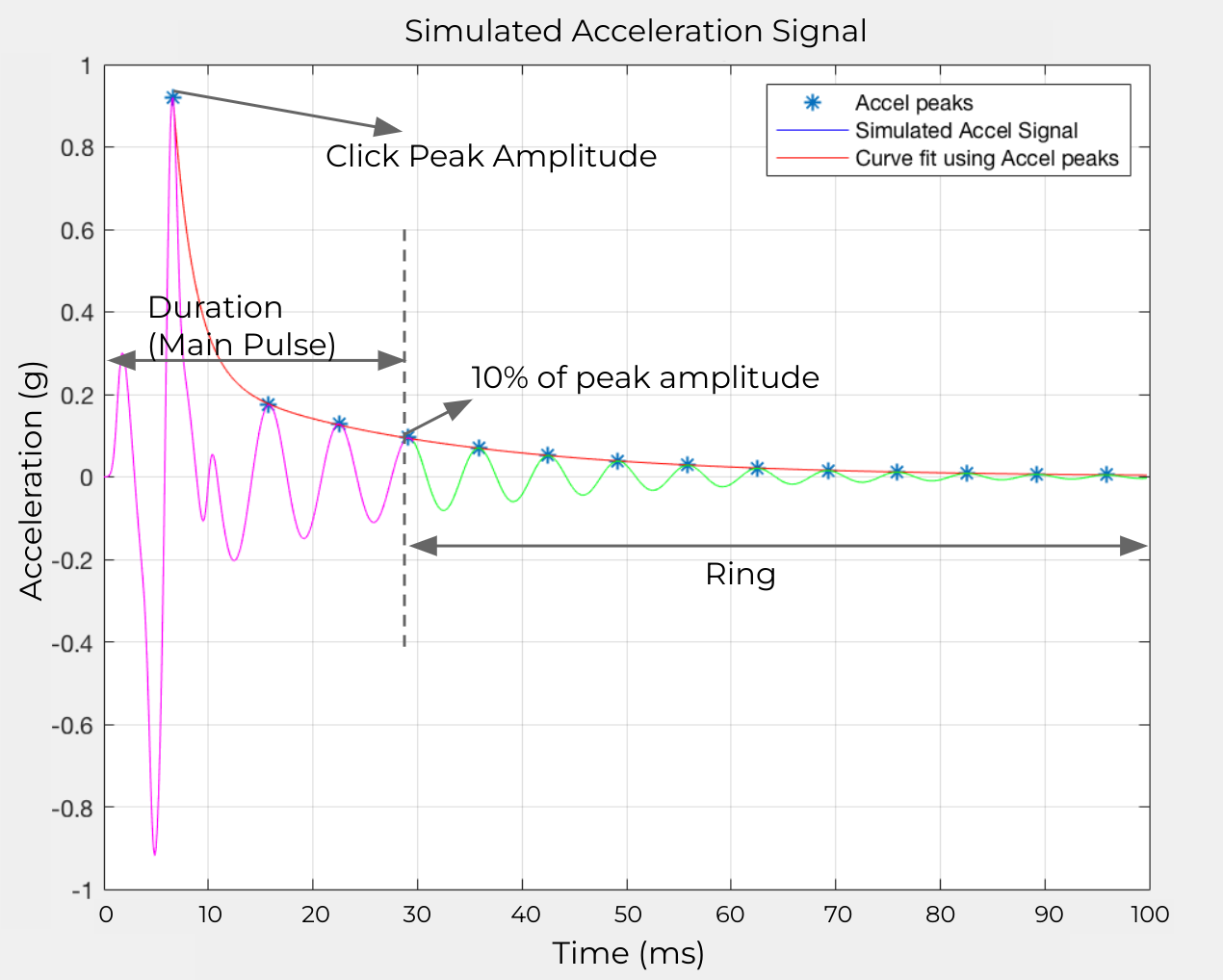
Gambar 5. Definisi rasio pulsa ke dering
Terapkan primitif pendek sebagai respons input pengguna atau diputar dalam komposisi yang lebih panjang untuk membuat tekstur lembut. Artinya, primitif ini biasanya sering dipicu dan diputar secara berurutan dengan cepat. Intensitas yang dirasakan dari satu primitif pendek dapat memperparah intensitas efek yang lebih besar. Karena alasan ini, kalibrasi satu primitif centang atau centang rendah dengan komposisi yang lebih besar, misalnya, 100 centang berturut-turut.
Primitif klik
Primitif klik adalah efek yang kuat dan jelas yang biasanya beroperasi dekat dengan frekuensi resonansi perangkat untuk mencapai output maksimum dalam durasi singkat. Primitif ini lebih kuat dan lebih dalam daripada primitif lainnya, yang beroperasi pada intensitas maksimum.
Jika tersedia, gunakan overdrive motor di awal dan pengereman aktif di akhir untuk mencapai waktu naik dan turun motor yang singkat. Untuk beberapa motor, menggunakan gelombang persegi, bukan gelombang sinus, dapat mencapai akselerasi yang lebih cepat. Gambar 6 menunjukkan contoh profil akselerasi output untuk primitif klik:
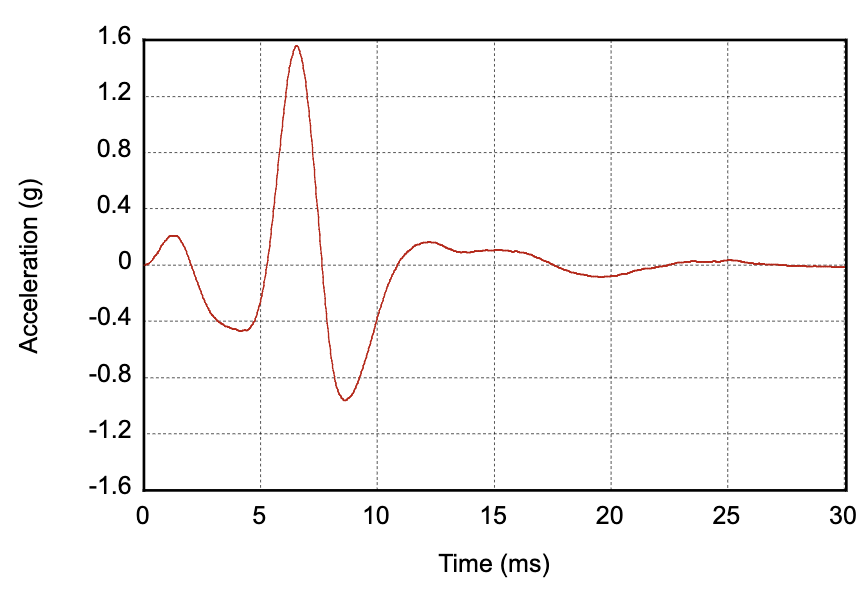
Gambar 6. Contoh profil akselerasi output untuk primitif klik
| Parameter | Panduan |
|---|---|
| Durasi |
Target: 12 md Batas: < 30 md |
| Akselerasi output puncak |
Target: 2 G Batas: > 1 G |
| Frekuensi | Kira-kira pada frekuensi resonansi |
Primitif centang (centang ringan)
Primitif centang adalah efek yang tajam dan singkat yang biasanya beroperasi pada rentang frekuensi yang lebih tinggi. Primitif ini juga dapat dijelaskan sebagai klik intensitas sedang pada frekuensi yang lebih tinggi dengan ekor yang pendek. Panduan yang sama berlaku untuk mencapai waktu naik yang singkat menggunakan overdrive motor atau gelombang persegi untuk awal mula, dan pengereman aktif pada offset. Gambar 7 menunjukkan contoh profil akselerasi output untuk primitif centang:
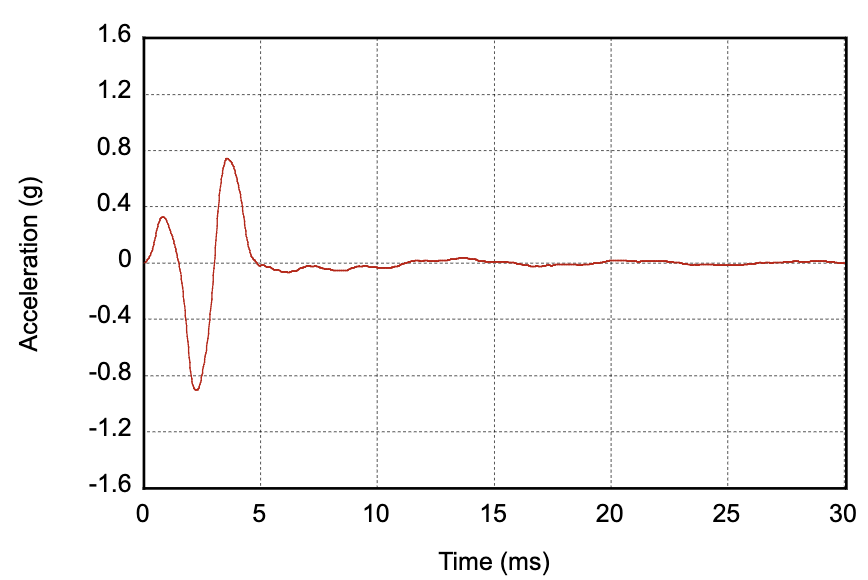
Gambar 7. Contoh profil akselerasi output untuk primitif centang
| Parameter | Panduan |
|---|---|
| Durasi |
Target: 5 md Batas: < 20 md |
| Akselerasi output puncak |
Target: Setengah dari Batas: Antara 0,5 G dan 1 G |
| Frekuensi |
Target: 2x frekuensi resonansi Batas: < 500 Hz |
Primitif centang rendah
Primitif centang rendah adalah versi centang ringan yang lebih lembut dan lebih lemah, yang beroperasi pada rentang frekuensi yang lebih rendah untuk memberikan lebih banyak body pada efek. Primitif ini juga dapat dijelaskan sebagai klik intensitas sedang pada frekuensi yang lebih rendah, yang dimaksudkan untuk digunakan berulang kali untuk respons dinamis. Panduan yang sama berlaku untuk mencapai waktu naik yang singkat menggunakan overdrive motor atau gelombang persegi untuk awal mula. Gambar 8 menunjukkan contoh profil akselerasi output untuk primitif centang rendah:
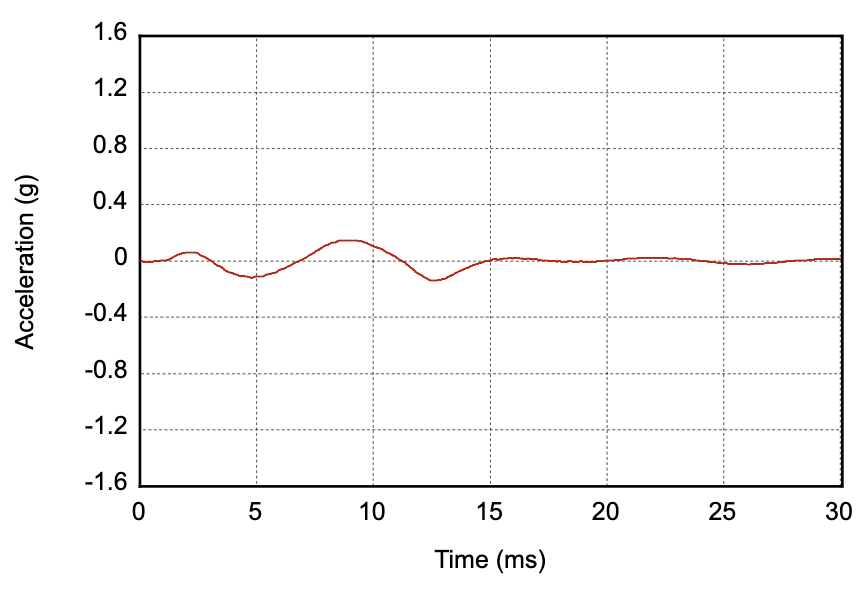
Gambar 8. Contoh profil akselerasi output untuk primitif centang rendah
| Parameter | Panduan |
|---|---|
| Durasi |
Target: 12 md Batas: < 30 md |
| Akselerasi output puncak |
Target: 1/4 dari Batas: Antara 0,2 G dan 0,5 G |
| Frekuensi |
Target: 2/3 frekuensi resonansi Batas: < 100 Hz |
Primitif Chirp
Primitif Chirp dapat dijelaskan oleh sinyal input untuk tingkat voltase dan frekuensi getaran. Akselerasi yang dapat dihasilkan motor pada rentang frekuensi yang berbeda-beda bergantung pada kurva respons frekuensi aktuator. Rentang frekuensi dan tingkat voltase harus disesuaikan berdasarkan per perangkat.
Primitif naik lambat
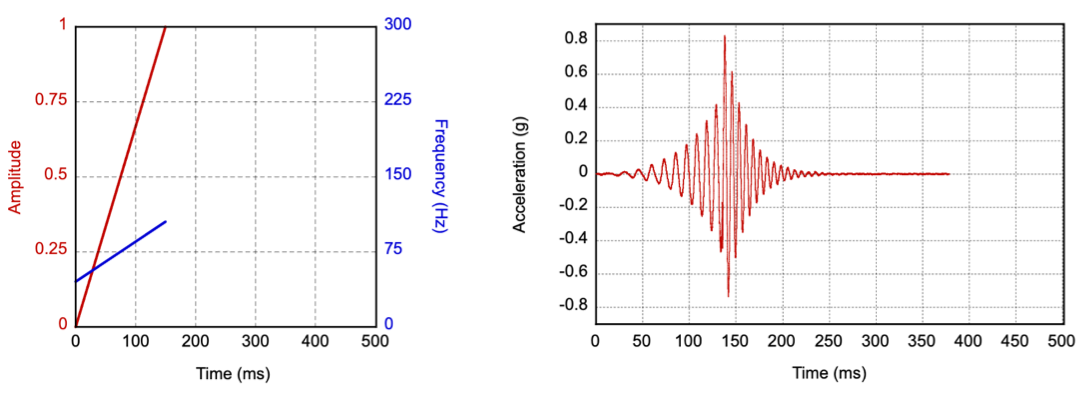
Kenaikan lambat adalah sapuan amplitudo dan frekuensi yang lambat ke atas dengan awal yang lembut dan intensitas getaran yang terus meningkat di seluruh sapuan. Kenaikan lambat dapat diterapkan dengan sapuan yang konsisten dari amplitudo dan frekuensi, menggunakan rentang frekuensi yang lebih rendah yang beroperasi di luar resonansi. Gambar 9 menunjukkan parameter input dan contoh profil akselerasi output untuk penerapan ini. (Garis merah cocok dengan label amplitudo di sebelah kiri dan menunjukkan bagaimana amplitudo getaran bervariasi dari waktu ke waktu. Garis biru cocok dengan label frekuensi di sebelah kanan dan menunjukkan bagaimana frekuensi getaran bervariasi dari waktu ke waktu.)
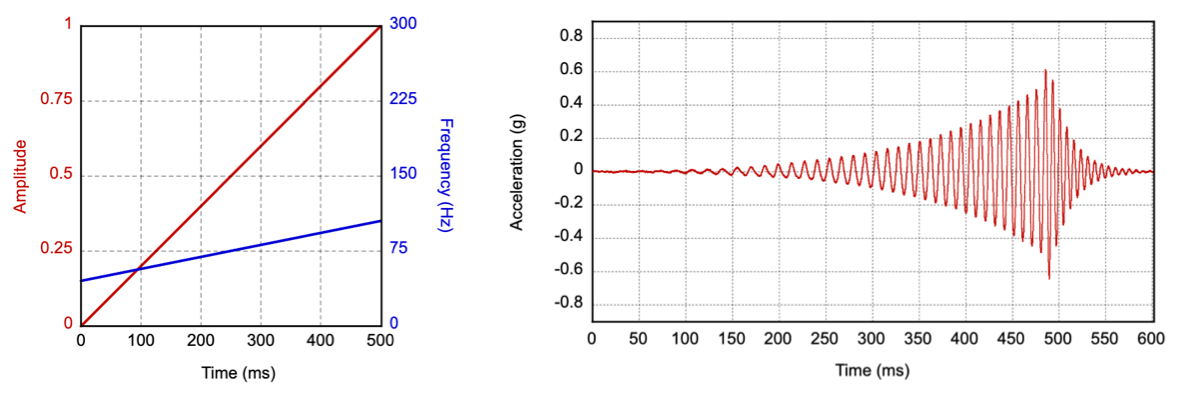
Gambar 9. Parameter input dan contoh profil akselerasi output untuk primitif naik lambat
Jika respons frekuensi motor terbatas (tidak cukup kuat di luar frekuensi resonansinya), penerapan alternatifnya adalah sapuan sinus dari 1/2x hingga 1x frekuensi resonansi. Resonansi motor berkontribusi untuk mencapai puncak sinyal di akhir.
| Parameter | Panduan |
|---|---|
| Durasi |
Target: 500 md Toleransi: 20 md |
| Akselerasi output puncak |
Target: 0,5 G Batas: Antara 0,5 G dan 1 G |
| Frekuensi |
Target: 1/2 hingga 2/3 frekuensi resonansi Alternatif: 1/2 hingga frekuensi resonansi |
Primitif naik cepat
Kenaikan cepat adalah sapuan amplitudo dan frekuensi yang lebih cepat ke atas dengan awal yang lembut dan intensitas getaran yang terus meningkat di seluruh sapuan. Target akselerasi output dan frekuensi getaran harus sama dengan primitif naik lambat, yang dicapai dalam durasi yang lebih singkat. Gambar 10 menunjukkan parameter input getaran dan contoh profil akselerasi output untuk primitif naik lambat. (Garis merah cocok dengan label amplitudo di sebelah kiri dan menunjukkan bagaimana amplitudo getaran bervariasi dari waktu ke waktu. Garis biru cocok dengan label frekuensi di sebelah kanan dan menunjukkan bagaimana frekuensi getaran bervariasi dari waktu ke waktu.)
Gambar 10. Parameter input dan contoh profil akselerasi output untuk primitif naik cepat
| Parameter | Panduan |
|---|---|
| Durasi |
Target: 150 md Toleransi: 20 md |
| Akselerasi output puncak |
Target: Sama dengan Batas: Sama dengan |
| Frekuensi |
Target: Sama dengan Alternatif: Sama dengan |
Primitif turun cepat
Penurunan cepat adalah sapuan amplitudo dan frekuensi yang cepat ke bawah dengan awal yang lembut. Anda dapat menggunakan frekuensi yang lebih tinggi sebagai titik awal saat motor meningkat untuk mencapai akselerasi output puncak. Frekuensi harus terus menurun di seluruh sapuan, bahkan selama waktu naik. Gambar 11 menunjukkan parameter input dan contoh profil akselerasi output untuk penerapan ini. (Garis merah cocok dengan label amplitudo di sebelah kiri dan menunjukkan bagaimana amplitudo getaran bervariasi dari waktu ke waktu. Garis biru cocok dengan label frekuensi di sebelah kanan dan menunjukkan bagaimana frekuensi getaran bervariasi dari waktu ke waktu.)
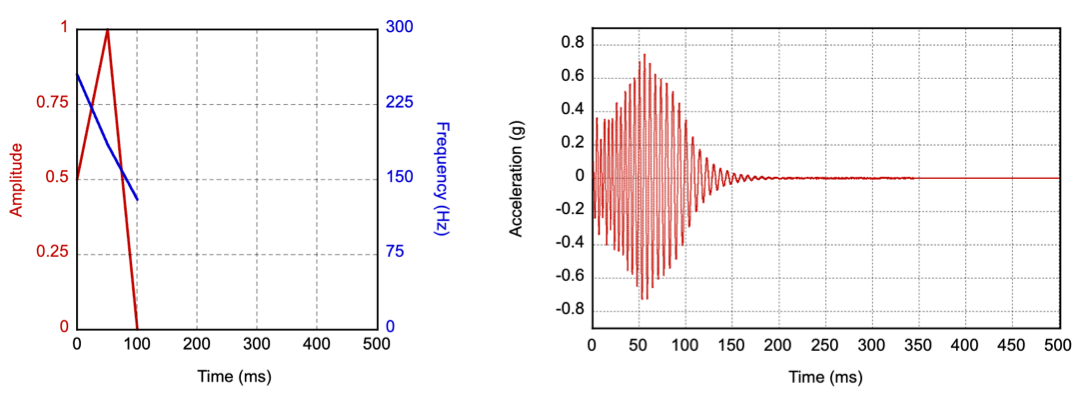
Gambar 11. Parameter input dan contoh profil akselerasi output untuk primitif turun cepat
| Parameter | Panduan |
|---|---|
| Durasi |
Target: 100 md Toleransi: 20 md |
| Akselerasi output puncak |
Target: 1 G Batas: Antara 0,5 G dan 2 G |
| Frekuensi |
Target: 2x hingga 1x frekuensi resonansi |
Primitif Thud
Thud adalah efek perkusi yang rendah dan berdebar yang mensimulasikan sensasi fisik mengetuk kayu berongga. Primitif ini beroperasi dalam rentang frekuensi rendah, mirip dengan primitif centang rendah, untuk memberikan lebih banyak body pada efek. Anda dapat menerapkan primitif thud sebagai sapuan amplitudo dan frekuensi ke bawah pada rentang frekuensi yang lebih rendah (sebaiknya kurang dari 100 Hz). Gambar 12 menunjukkan parameter input dan contoh profil akselerasi output untuk penerapan ini. (Garis merah cocok dengan label amplitudo di sebelah kiri dan menunjukkan bagaimana amplitudo getaran bervariasi dari waktu ke waktu. Garis biru cocok dengan label frekuensi di sebelah kanan dan menunjukkan bagaimana frekuensi getaran bervariasi dari waktu ke waktu.)
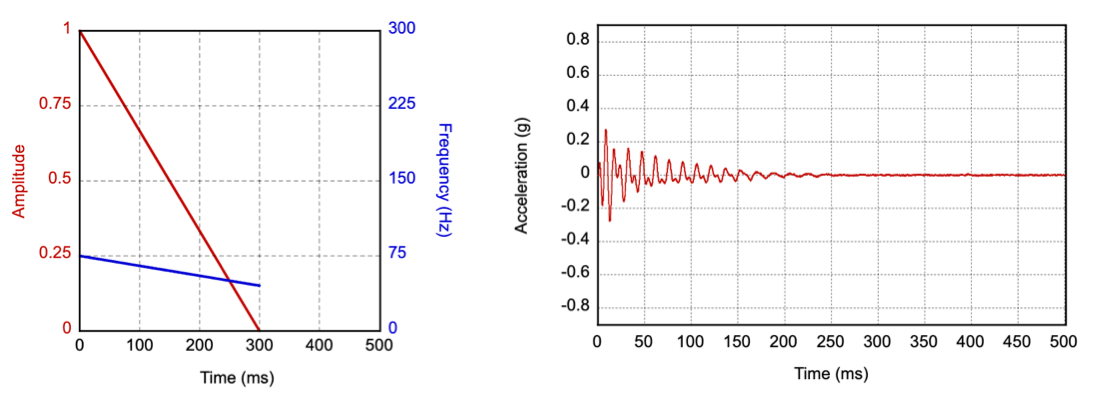
Gambar 12. Parameter input dan contoh profil akselerasi output untuk primitif thud
Jika respons frekuensi motor terbatas, penerapan alternatifnya adalah memulai dengan sinyal drive intensitas penuh pada frekuensi resonansi dan turun ke frekuensi terendah yang masih dapat dirasakan. Pendekatan ini mungkin memerlukan peningkatan intensitas sinyal drive pada frekuensi yang lebih rendah agar getaran dapat dirasakan.
| Parameter | Panduan |
|---|---|
| Durasi |
Target: 300 md Toleransi: 20 md |
| Akselerasi output puncak |
Target: 0,25 G Batas: Antara 0,2 G dan 0,5 G |
| Frekuensi |
Target: 1/2 hingga 1/3 frekuensi resonansi Alternatif: 1x hingga 1/2 frekuensi resonansi |
Primitif Spin
Spin mensimulasikan momentum berputar dari putaran cepat ke atas dan ke bawah dengan aksen kecil di tengah. Spin dapat diterapkan dengan menyapu amplitudo dan frekuensi secara independen, ke arah yang berlawanan dan diikuti oleh gerakan terbalik. Penting untuk menggunakan rentang frekuensi yang lebih rendah (sebaiknya kurang dari 100 Hz). Gambar 13 menunjukkan parameter input dan contoh profil akselerasi output untuk penerapan ini. (Garis merah cocok dengan label amplitudo di sebelah kiri dan menunjukkan bagaimana amplitudo getaran bervariasi dari waktu ke waktu. Garis biru cocok dengan label frekuensi di sebelah kanan dan menunjukkan bagaimana frekuensi getaran bervariasi dari waktu ke waktu.)
Sebaiknya primitif spin dipanggil dua kali berturut-turut, atau tiga kali dalam komposisi, untuk mencapai sensasi berputar dan tidak stabil.
Jika respons frekuensi motor terbatas, penerapan alternatifnya adalah melakukan sapuan sinus cepat dari 1/2x hingga 1x frekuensi resonansi dan kembali. Resonansi motor secara otomatis memberikan aksen pada sinyal di tengah.
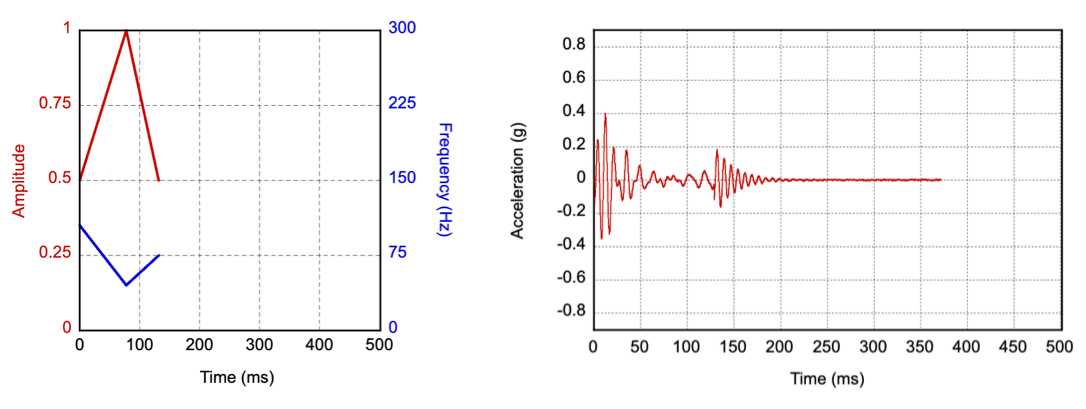
Gambar 13. Parameter input dan contoh profil akselerasi output untuk primitif spin
| Parameter | Panduan |
|---|---|
| Durasi |
Target: 150 md Toleransi: 20 md |
| Akselerasi output puncak |
Target: 0,5 G Batas: Antara 0,25 G dan 0,75 G |
| Frekuensi |
Target: 2/3 hingga 1/3, lalu kembali ke 1/2 frekuensi resonansi Alternatif: 2/3 hingga 1x, lalu kembali ke 1/2 frekuensi resonansi |